使用WiFi测量仪进行机器人定位的粒子过滤器研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
使用WiFi测量仪进行机器人定位的粒子滤波器研究旨在利用WiFi信号测量数据实现机器人的定位。
1. 研究背景:在室内环境中,GPS信号通常不可靠或者无法接收到。为了在这种情况下进行机器人定位,可以利用WiFi信号进行测量。WiFi信号的强度和到达时间等信息可以用于确定机器人相对于WiFi AP(接入点)的位置。
2. 系统建模:首先,需要建立机器人的状态空间模型和观测模型。状态空间模型描述机器人的动力学特性和运动行为,而观测模型将WiFi测量数据与机器人的位置进行关联。
3. 粒子表示:为了估计机器人的位置,使用一组粒子来表示机器人的可能位置。每个粒子代表机器人的一个假设位置,这些粒子由状态空间模型进行迭代演化。
4. 粒子滤波更新:根据收集到的WiFi测量数据,需要对粒子进行状态更新。这是通过计算每个粒子的观测概率来实现的,观测概率反映了粒子位置与测量数据之间的匹配程度。
5. 粒子滤波重采样:随着时间推移和系统演化,粒子权重会发生变化。为了保持重要粒子的多样性并去除不重要的粒子,需要进行重采样操作。重采样后的粒子分布更加准确地反映机器人的实际位置。
6. 位置估计:根据粒子的权重,可以计算机器人的位置估计值。一种常见的方法是使用具有较高权重的粒子通过加权平均值来估计机器人的位置。
该研究涉及机器人定位中的粒子滤波器和WiFi测量仪的结合。具体的研究内容可能涉及WiFi信号模型、粒子滤波算法优化和实时定位等方面。研究的目标是利用WiFi测量数据提供高精度和实时的机器人室内定位解决方案。
需要注意的是,WiFi信号的可用性和稳定性会受到室内环境的影响,如信号干扰、衰减和多径效应。因此,在研究中需要考虑这些因素,并尝试通过滤波和校准等方法来提高定位精度和稳定性。
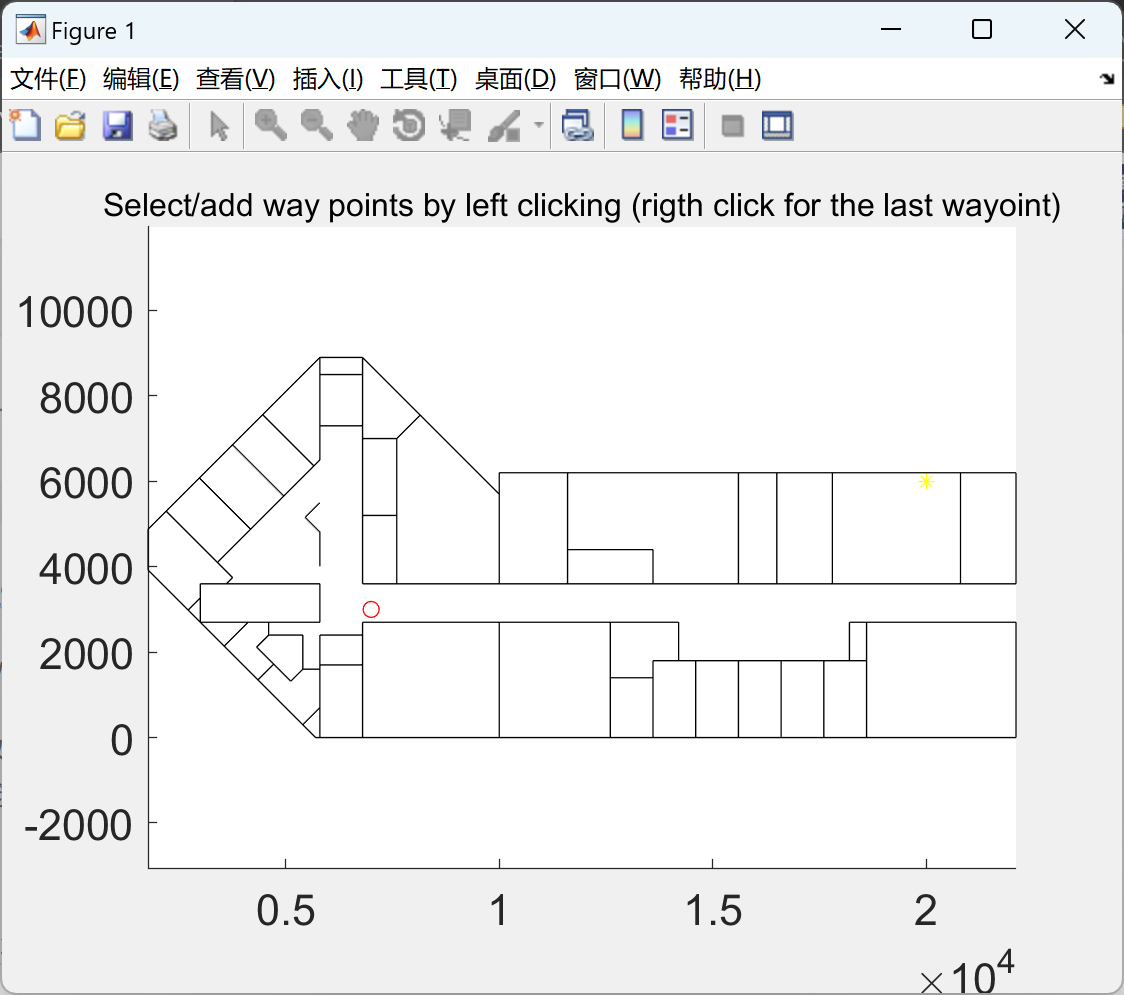
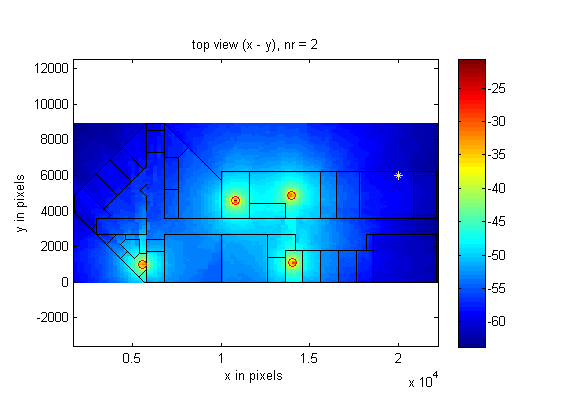
本文通过使用WiFi信号校正Odometric测量值,使用粒子过滤器跟踪机器人。演示如何通过粒子过滤器对机器人进行定位。WiFi测量由光线追踪引擎建模,允许多达3面墙的反射。粒子过滤器有助于校正非全息机器人轨迹的测程法。
📚2 运行结果


部分代码:
%% Demo illustring WiFi propagation loss in indoor building
clear,close all
nb_pts = 100;
nr = 2;
option.TX = 0;
option.RX = 0;
option.path = 0;
flp = load_flp('norwich01.flp');
temp = flp.geom.planes([1 , 4 , 7] , :);
xmin = min(temp(:));
xmax = max(temp(:));
temp = flp.geom.planes([2 , 5 , 8] , :);
ymin = min(temp(:));
ymax = max(temp(:));
temp = flp.geom.planes([3 , 6 , 9] , :);
zmin = min(temp(:));
zmax = max(temp(:));
vectx = (xmin:(xmax-xmin)/(nb_pts-1):xmax);
vecty = (ymin:(ymax-ymin)/(nb_pts-1):ymax);
[X , Y] = meshgrid(vectx , vecty);
Z = ((zmax-zmin)/2)*ones(nb_pts , nb_pts);
RX = [X(:) , Y(:) , Z(:)]';
figure(1)
plot_flp(flp , option);
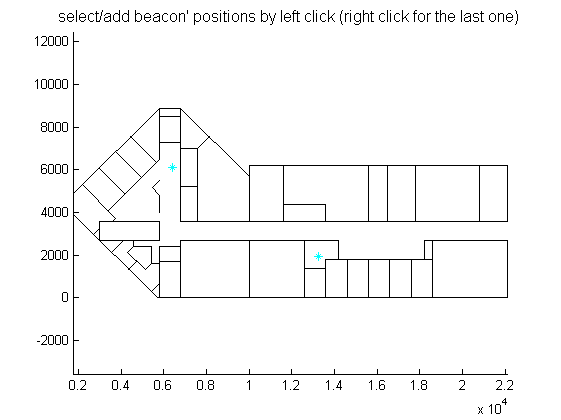
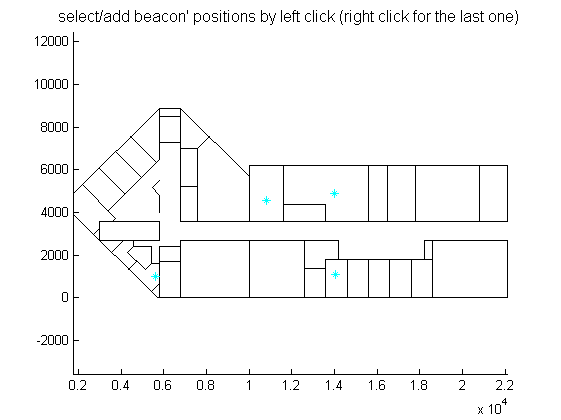
title('select/add beacon'' positions by left click (right click for the last one)', 'fontsize' , 12)
hold on
[x , y] = getpts;
temp = (zmax-zmin)/2;
flp.info.TXpoint = [x' ; y' ; temp(: , ones(1 , length(x)))];
% flp.info.TXpoint = [6000 ; 6000 ; 500];
plot(flp.info.TXpoint(1 , :) , flp.info.TXpoint(2 , :) , 'c*');
drawnow
hold off
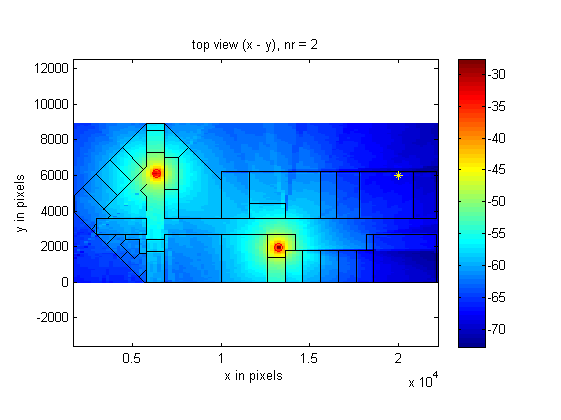
rs_amp = total_power3(flp.info.TXpoint , RX , flp.geom.planes , flp.geom.material , flp.info.fc , nr);
figure(2)
imagesc(vectx , vecty , 20*log10(reshape(sum(rs_amp , 1) , nb_pts, nb_pts)));
hold on
plot_flp(flp);
title(sprintf('top view (x - y), nr = %d',nr))
%title('three dimensional view')
xlabel('x in pixels')
ylabel('y in pixels')
zlabel('z in pixles')
axis xy
% view(0,90);
% axis equal
colorbar
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]黄猛,杜红彬.移动机器车的WiFi接口设计[J].自动化仪表,2010,31(03):50-52+56.DOI:10.16086/j.cnki.issn1000-0380.2010.03.007.
[2] 杨博宇, 张煜翔, 王浩然等. (2018). 基于WiFi测量的移动机器人定位研究. 自动化仪表, 39(11), 110-117.
🌈4 Matlab代码实现
相关文章:
使用WiFi测量仪进行机器人定位的粒子过滤器研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
【vue】vue 里面使用 v-html 插入的文本带有换行符‘\n‘不换行
最近开发vue2 项目 ,接口返回的是类似于这样的数据:我是第一行的哦\n我是第二行的哦 我是直接这样渲染的, //html <p v-htmltext></p>//渲染值 this.text "我是第一行的哦\n我是第二行的哦"但结果却是不如意&#x…...
)
Java失效算法与应用(FIFO、LRU、LFU)
文章目录 一、什么是失效算法二、先来先淘汰(FIFO)1、FIFO概述2、Java实现FIFO3、FIFO特点 三、最久未用淘汰(LRU)1、LRU概述2、Java实现LRU 四、最近最少使用(LFU)1、LFU概述2、Java实现LFU 五、应用案例 …...
Go语音介绍
Go语言介绍 Go 即Golang,是Google公司2009年11月正式对外公开的一门编程语言。 Go是静态强类型语言,是区别于解析型语言的编译型语言。 解析型语言——源代码是先翻译为中间代码,然后由解析器对代码进行解释执行。 编译型语言——源代码编…...
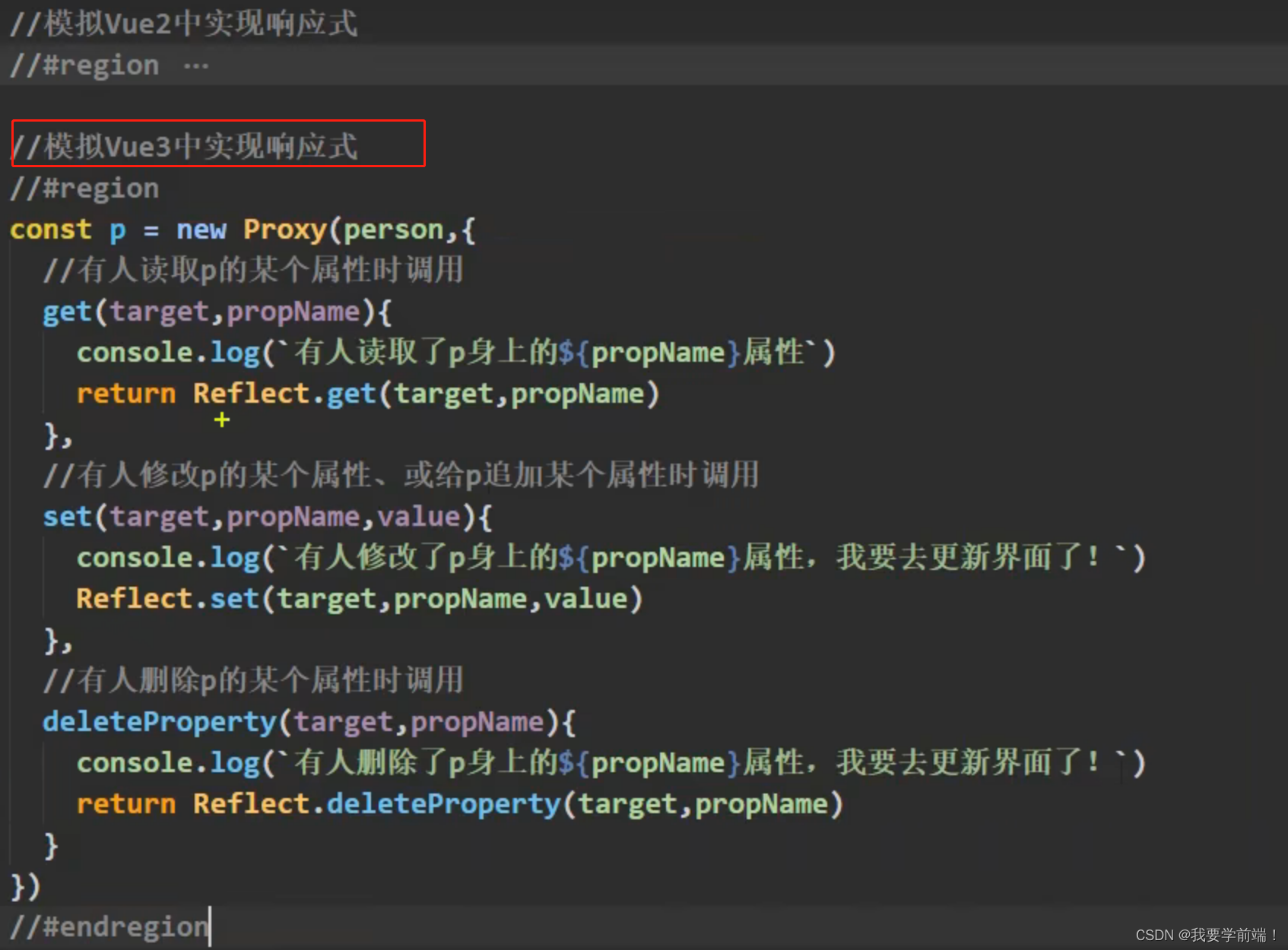
Vue2与Vue3响应式原理
Vue2的响应式 Vue3的响应式...

flask中写一个基础的sqlHelper类
写一个SQLHelper类: from flask_sqlalchemy import SQLAlchemydb SQLAlchemy()class SQLHelper:staticmethoddef add(record):db.session.add(record)return SQLHelper.session_commit()staticmethoddef add_all(records):db.session.add_all(records)return SQLH…...
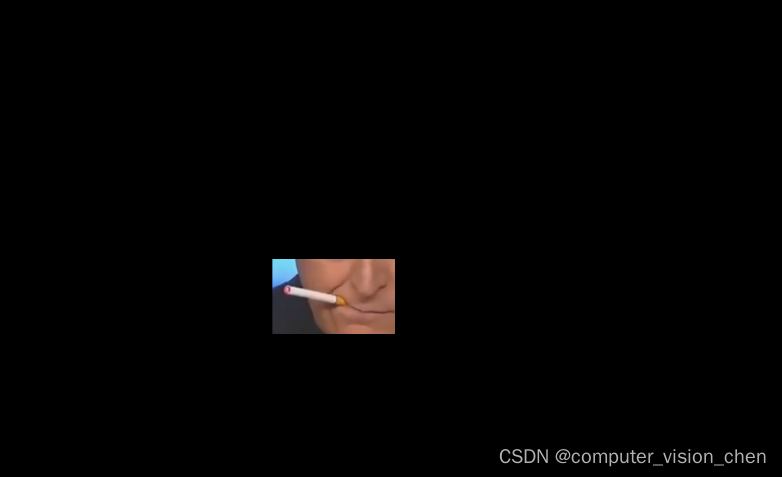
opencv的Mask操作,选择图片中感兴趣的区域
最近做目标检测任务的时候,需要对固定区域的内容进行检测,要用到opencv的mask操作,选择图片固定的区域 代码 import cv2 import numpy as npimg cv2.imread(data/images/smoking.png)# 弹出一个框 让你选择ROI | x,y是左上角的坐标 x,y,w,…...
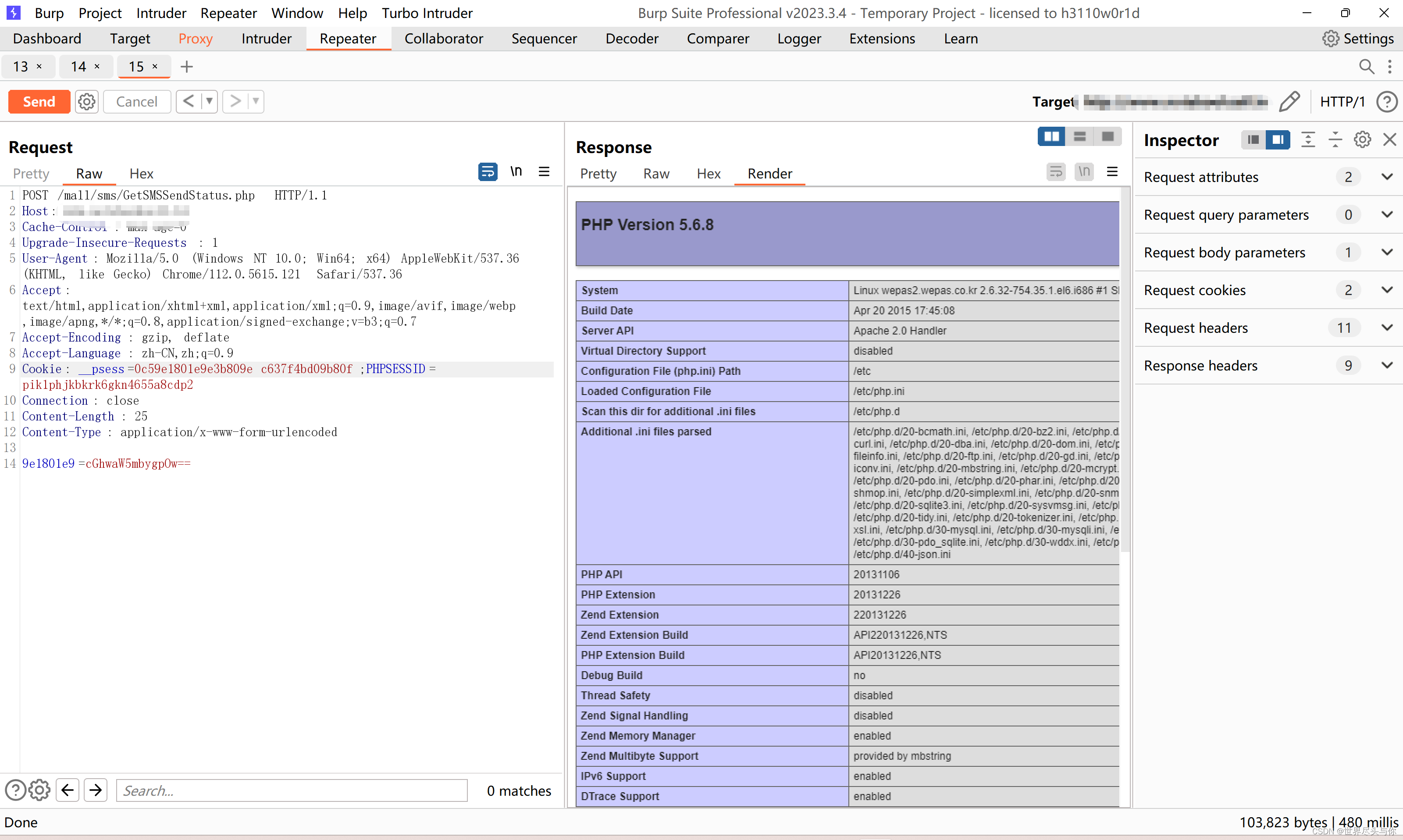
一次有趣的Webshell分析经历
一次有趣的Webshell分析经历 1.拉取源代码2.解密后门代码3.分析webshell逻辑4.分析404的原因5.附:格式化后的php代码 1.拉取源代码 在对某目标做敏感目录收集时发现对方网站备份源代码在根目录下的 backup.tar.gz,遂下载,先使用D盾分析有没有…...
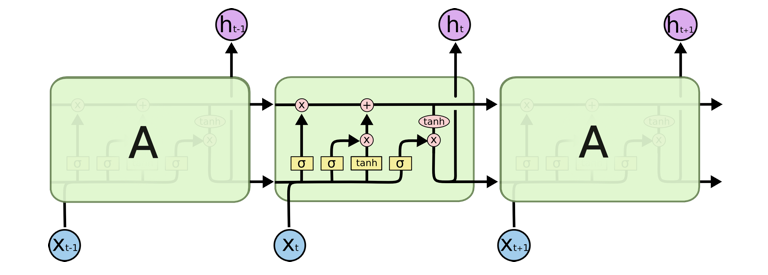
【NLP概念源和流】 05-引进LSTM网络(第 5/20 部分)
一、说明 在上一篇博客中,我们讨论了原版RNN架构,也讨论了它的局限性。梯度消失是一个非常重要的缺点,它限制了RNN对较短序列的建模。香草 RNN 在相关输入事件和目标信号之间存在超过 5-10 个离散时间步长的时间滞时无法学习。这基本上限制了香草RNN在许多实际问题上的应用,…...
Vue没有node_modules怎么办
npm install 一下 然后再npm run serve 就可以运行了...

企业级高负载web服务器-Tomcat小项目
目录 web静态动态页面区别安装java环境安装Tomcat安装Tomcat包到目录查看Tomcat主目录结构查看Tomcat配置目录结构Tomcat管理Tomcat web管理功能 部署jpress应用 web静态动态页面区别 静态页面: 在网站设计中,纯粹HTML格式的网页(可以包含图…...

《golang设计模式》第一部分·创建型模式-03-建造者模式(Builder)
文章目录 1. 概念1.1 角色1.2 类图 2. 代码示例2.1 设计2.2 代码2.3 类图 1. 概念 1.1 角色 Builder(抽象建造者):给出一个抽象接口,以规范产品对象的各个组成成分的建造。ConcreteBuilder(具体建造者)&a…...

git 忽略掉不需要的文件
第一步:创建.gitignore文件 touch .gitignore 第二步:使用vi编辑器 输入不需要的文件,或用通配符*来忽视一系列文件 效果:...
摄像机sd卡格式化怎么恢复数据?简单五步轻松解决
在使用摄像机时,有时不慎将SD卡格式化,导致重要的照片或视频文件丢失。然而,不必惊慌,本文将详细解释如何恢复被格式化的摄像机SD卡上的数据,可通过下面提供的五步,轻松解决数据丢失问题,以确保…...
1-4 AUTOSAR方法论--开发流程
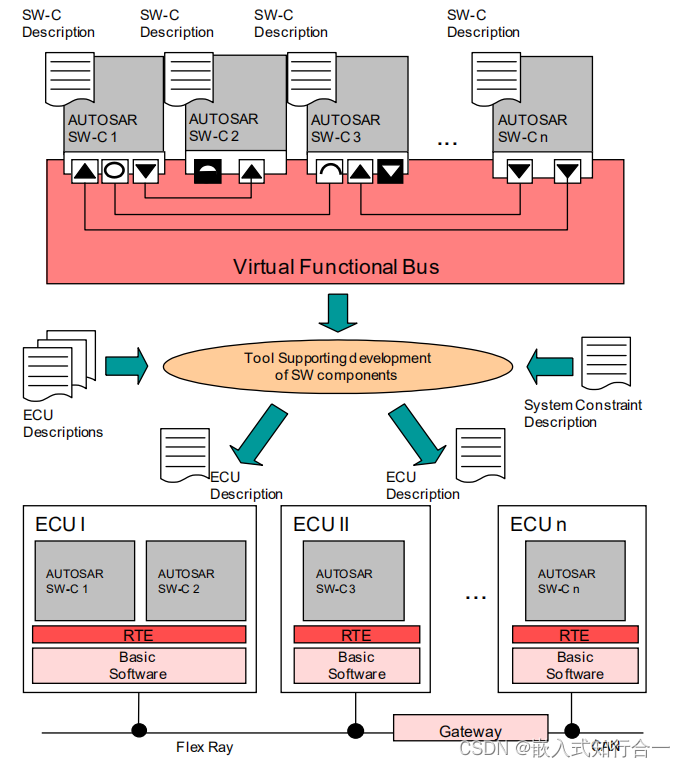
目录 一、方法论 二、单个ECU开发流程 一、方法论 AUTOSAR 方法论(AUTOSAR Methodology)中车用控制器软件的开发涉及系统级、ECU 级的开发。 系统级:主要考虑系统功能需求、硬件资源、系统约束,然后建立系统架构; 输…...
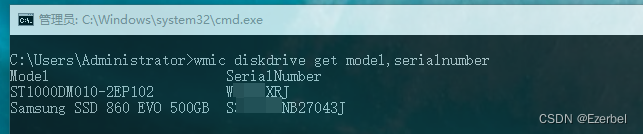
Win10查询硬盘序列号
添加wmic命令 winR cmd命令 wmic diskdrive get model, serialnumber...

减少错误和重复工作:PDM系统的智能排错功能
减少错误和重复工作:PDM系统的智能排错功能 在产品开发和制造过程中,错误和重复工作常常是企业面临的挑战。这不仅浪费了宝贵的时间和资源,还可能导致产品质量下降和生产延误。PDM系统(Product Data Management,产品数…...

【面试题】作用域面试题
作用域 全局作用域局部作用域(函数里)也称函数作用域块级作用域 {}包裹的 例如if for 括号()也算 变量 全局变量 谁都能用,在函数内也可以局部变量,只能在该函数内用,如果这个函数嵌套了子函…...
)
08 定时器(下)
08 定时器(下) 本文内容 定时器处理非活动连接模块,分为定时方法与信号通知流程;定时器及其容器设计、定时任务的处理。 定时器设计,将连接资源与定时事件等封装起来,具体包括连接资源、超时时间和回调函…...
C++设计模式之适配器设计模式
文章目录 C适配器设计模式什么是适配器设计模式该模式有什么优缺点优点缺点 如何使用 C适配器设计模式 什么是适配器设计模式 适配器设计模式是一种行为型设计模式,它允许你将两个不兼容的接口组合在一起,使它们能够协同工作。 该模式有什么优缺点 优…...

Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 [特殊字符]
Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 😎 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 还在为每次安装系统都要重新制作启动盘而烦恼吗&#x…...

Visual Studio 项目属性页开发完全教程:从基础到高级
Visual Studio 项目属性页开发完全教程:从基础到高级 【免费下载链接】project-system The .NET Project System for Visual Studio 项目地址: https://gitcode.com/gh_mirrors/pr/project-system Visual Studio 项目属性页是开发者管理项目配置的核心界面&a…...

小说下载器终极指南:一站式解决100+网站小说保存难题
小说下载器终极指南:一站式解决100网站小说保存难题 【免费下载链接】novel-downloader 一个可扩展的通用型小说下载器。 项目地址: https://gitcode.com/gh_mirrors/no/novel-downloader 在数字阅读时代,你是否曾因小说突然下架、网站404或网络中…...
)
ThinkPad开机报错0183/0253?别慌,手把手教你搞定EFI变量错误(附BIOS重置教程)
ThinkPad开机报错0183/0253?EFI变量错误全面解决方案当你按下ThinkPad的电源键,期待熟悉的开机画面时,屏幕上却突然跳出一串神秘代码——"0183: Bad CRC of Security Settings in EFI Variable"或"0253: EFI Variable Block D…...

如何从零构建智能FOC轮腿机器人:完整开源硬件系统终极指南
如何从零构建智能FOC轮腿机器人:完整开源硬件系统终极指南 【免费下载链接】foc-wheel-legged-robot Open source materials for a novel structured legged robot, including mechanical design, electronic design, algorithm simulation, and software developme…...

Burp Suite证书安装全解:HTTPS抓包失败的根源与跨平台命令行方案
1. 为什么必须亲手安装Burp Suite证书——不是“点一下就完事”的操作很多人第一次在手机或测试设备上配置Burp Suite代理时,会下意识认为:只要把电脑上的Burp监听地址填进Wi-Fi代理设置,再用浏览器访问http://burp,点击那个绿色的…...

基于Arduino的智能蓝调节拍器:DIY音乐练习伴侣
1. 项目概述:一个能“演奏”蓝调的低成本节拍器玩乐器的人,对节拍器这东西又爱又恨。它像一位严厉的监工,用单调的“嘀嗒”声强迫你跟上节奏。但你想过没有,这个监工其实可以很有趣?几年前,我在练习蓝调吉他…...

腾讯 Marvis 初级使用教程——从安装到上手
腾讯最新系统级AI助手Marvis(2026年5月20日发布),官网 https://marvis.qq.com,主打“一句话操作电脑”、跨端协同、GUI Agent执行。虽然是个【小龙虾】,但上手其实不难。这篇就简单写写 Marvis 的安装和基础使用&#…...

基于MAX78000的医疗紧急呼叫系统:边缘AI与低功耗设计实战
1. 项目概述与核心价值大家好,我是Victor Hugo,一名电子工程师。今天我想和大家分享一个我最近完成并参与设计竞赛的项目:一个基于MAX78000 FTHR开发板的医疗紧急呼叫辅助系统。这个项目的核心,不是从零开始造一个新轮子ÿ…...
【php语法学习,iscc校赛wp】)
学习日志(三)【php语法学习,iscc校赛wp】
1. 任务 1.1.1.1.1.1. 知识部分 rce看【之前的笔记?】php的知识点学习继续jwt token好像是比赛的题目考察内容,我看看php伪协议 1.1.1.1.1.2. 题目 参加iscc比赛【五一】rce题目 1.1.1.1.1.3. 环境配置 把vscode搞好,上学期没有把Php配…...