RTT(RT-Thread)时钟管理
目录
时钟管理
时钟节拍
RTT工程目录结构介绍
配置文件:rtconfig.h
获取系统节拍
获取系统节拍数函数
实例
定时器
RT_Thread定时器介绍
定时器源码分析(了解即可)
rt_system_timer_init (硬件定时器初始化)
rt_system_timer_thread_init(软件定时器初始化)
总结
定时器工作机制
定时器相关接口
启动和停止定时器
动态创建定时器
创建定时器
删除定时器
实例
静态创建定时器
初始化定时器
脱离定时器
实例
控制定时器
实例
高精度延时
 时钟管理
时钟管理
操作系统需要通过时间来规范其任务,本章主要介绍时钟节拍和基于时钟节拍的定时器。
时钟节拍
任何操作系统都需要提供一个时钟节拍,以供系统处理所有和时间有关的事件,如线程的延时、线程的时间片轮转调度以及定时器超时等。
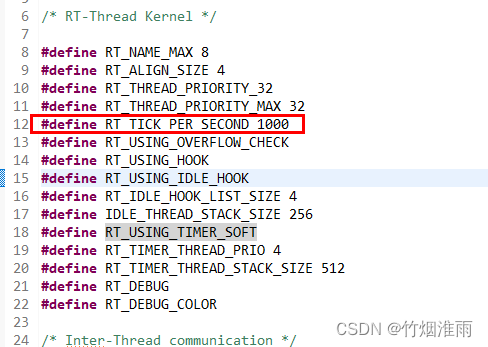
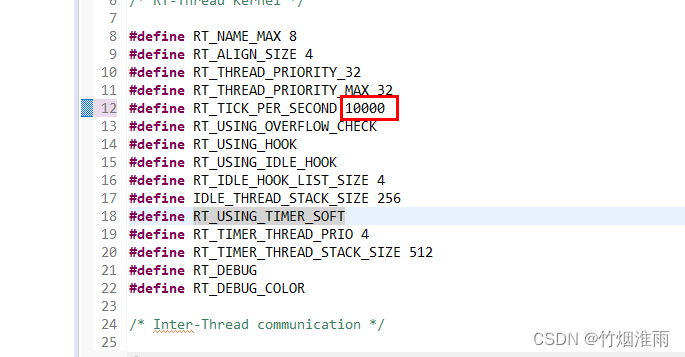
RT-Thread 中,时钟节拍的长度可以根据 RT_TICK_PER_SECOND 的定义来调整。 rtconfig.h配置文件中定义:
/* *频率是1000HZ 周期是1/1000 s*所以节拍是1ms*/
#define RT_TICK_PER_SECOND 1000RTT工程目录结构介绍
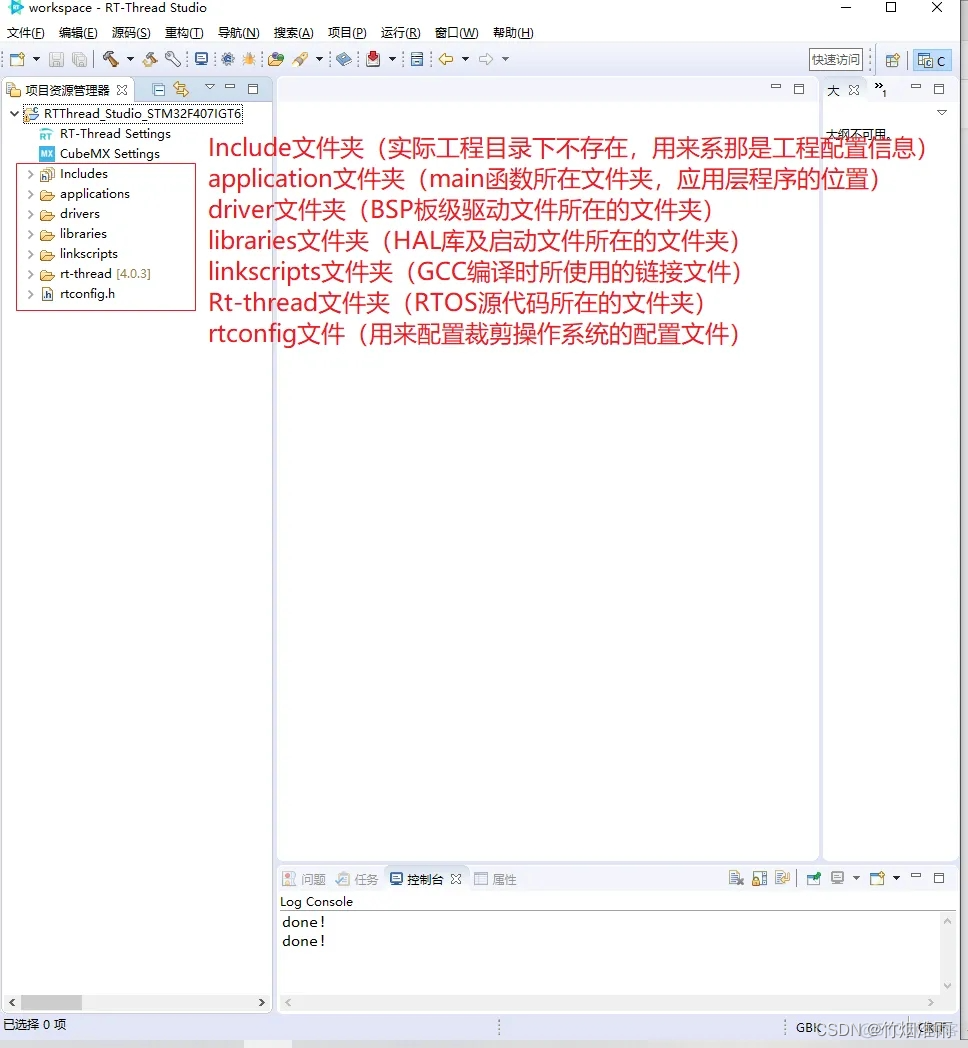
配置文件:rtconfig.h
其中包括了内核相关的配置、内部线程通信配置、内存管理、内核设备对象、RTT组件、C++特性、设备驱动和USB配置等等
时钟节拍配置属于内核相关配置,默认配置为1000,表示1000Hz,一次节拍为1ms
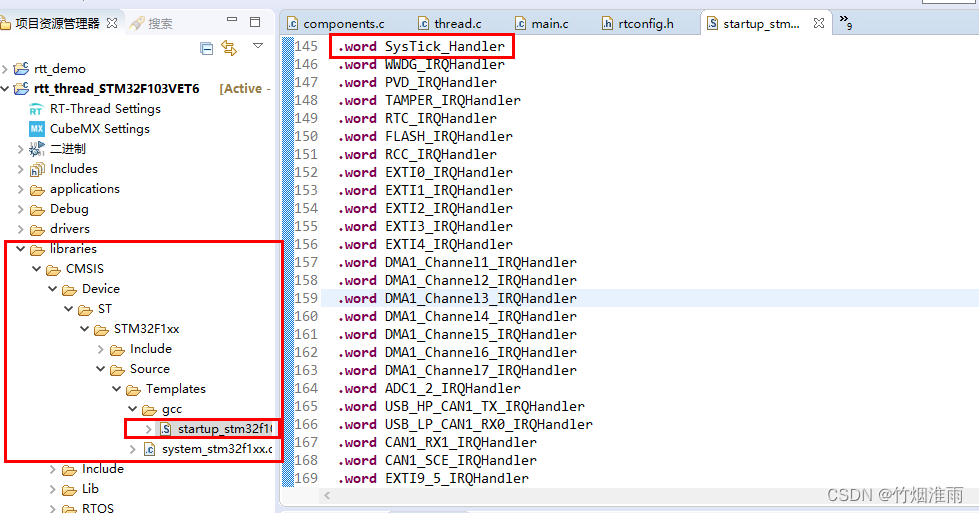
系统滴答定时器中断处理函数(每1ms触发一次systick定时器中断):每一次发生中断都会进入中断处理函数
我们可以通过启动文件的中断向量表中进入
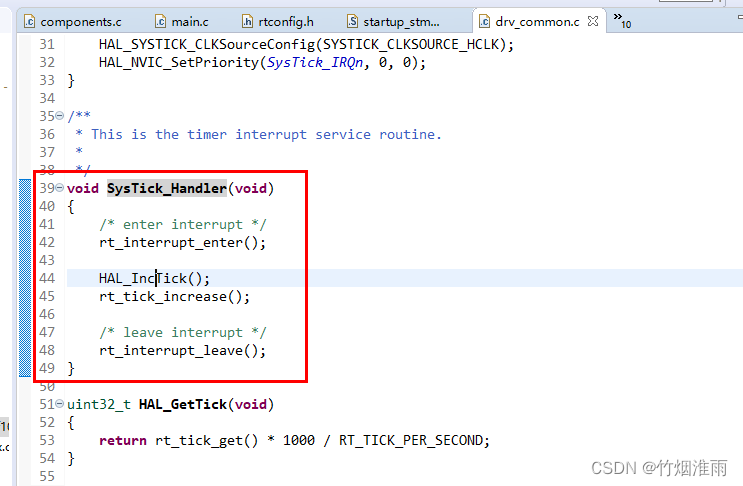
void SysTick_Handler(void)
{/* enter interrupt */rt_interrupt_enter();HAL_IncTick();rt_tick_increase();// ++ rt_tick:全局变量自加,//记录的是系统从启动到现在的时间节拍数/* leave interrupt */rt_interrupt_leave();
}获取系统节拍
获取系统节拍数函数
/*** This function will return current tick fromoperating system startup** @return current tick*/
rt_tick_t rt_tick_get(void)实例
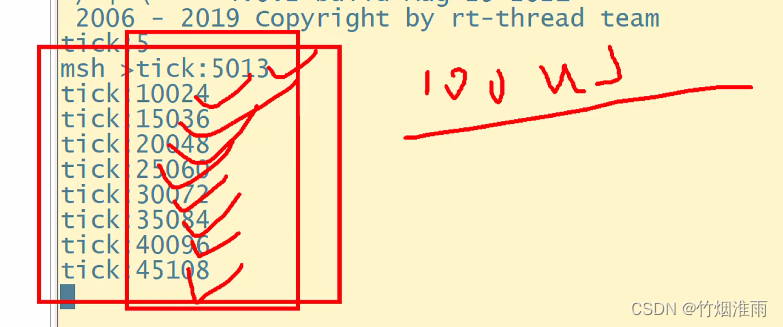
通过获取系统节拍数来验证时钟节拍1ms一次
... ...
int main(void)
{int i=0;rt_tick_t tick=0;for(i=0;i<10;i++){tick = rt_tick_get();rt_kprintf("tick:%u\n",tick);rt_thread_mdelay(500);}return RT_EOK;
}运行结果:
通过结果可以验证时钟节拍确实为1ms一次

如果我们将频率改为10000Hz,即100ms一个节拍
修改会导致程序出现警告:division by zero 除数是0
但并不影响运行结果
定时器
定时器,是指从指定的时刻开始,经过一定的指定时间后触发一个事件,定时器有硬件定时器和软件定时器之分:
硬件定时器: 芯片本身提供的定时功能。一般是由外部晶振提供给芯片输入时钟,芯片向软件模块提供一组配置寄存器,接受控制输入,到达设定时间值后芯片中断控制器产生时钟中断。如果用硬件定时器,触发中断以后进行的处理中断函数属于中断上下文。硬件定时器的精度一般很高,可以达到纳秒级别,并且是中断触发方式。
软件定时器: 由操作系统提供的一类系统接口,它构建在硬件定时器基础之上,使系统能够提供不受数目限制的定时器服务。软件定时器触发的中断回调函数属于线程上下文。
RT-Thread操作系统提供软件实现的定时器,以时钟节拍(OS Tick)的时间长度为单位,即定时数值必须是OS Tick的整数倍。
RT_Thread定时器介绍
RT-Thread 的定时器提供两类定时器机制:
- 第一类是单次触发定时器,这类定时器在启动后只会触发一次定时器事件,然后定时器自动停止。
- 第二类是周期触发定时器,这类定时器会周期性的触发定时器事件,直到用户手动的停止,否则将永远持续执行下去
根据定时器超时函数执行时所处的上下文环境,RT-Thread的定时器可以分为HARD_TIMER模式和SOFT_TIMER模式。
HARD_TIMER模式:中断上下文
定时器超时函数的要求:执行时间应该尽量短(减少对正常执行程序的影响),执行时不应导致当前上下文挂起、等待。例如在中断上下文中执行的超时函数它不应该试图去申请动态内存、释放动态内存等
SOFT_TIMER模式:线程上下文
该模式被启用后,系统会在初始化时创建一个 timer 线程,然后 SOFT_TIMER 模式的定时器超时函数在都会在timer线程的上下文环境中执行
定时器源码分析(了解即可)
(1) RT-Thread OS启动阶段,执行rtthread_startup函数,在该函数中调用了定时器初始化函数
/* timer system initialization */
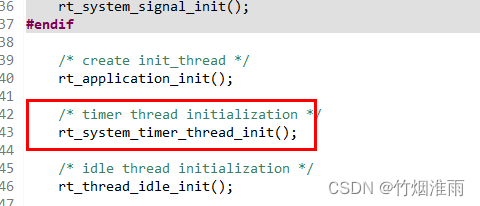
rt_system_timer_init();/* timer thread initialization */
rt_system_timer_thread_init(); 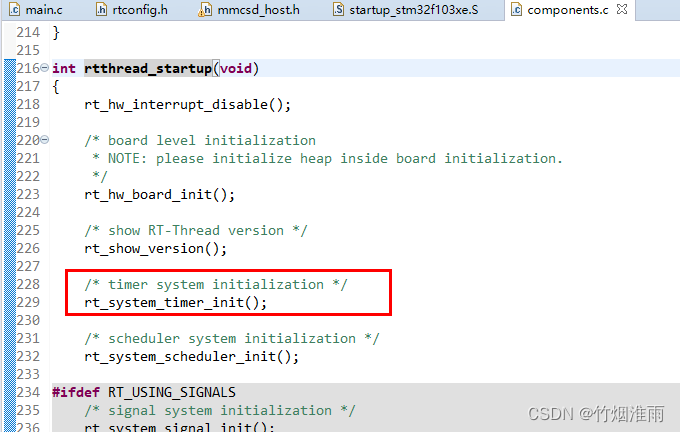
rt_system_timer_init (硬件定时器初始化)
/*** @ingroup SystemInit** This function will initialize system timer*/
void rt_system_timer_init(void)
{int i;for (i = 0; i < sizeof(rt_timer_list) / sizeof(rt_timer_list[0]); i++){rt_list_init(rt_timer_list + i);}
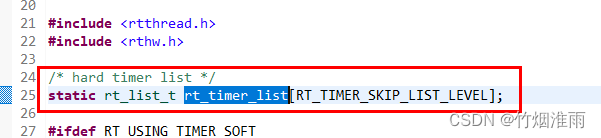
}转到rt_list_init()函数定义处,可以发现在RTT中,内核是通过双向列表的方式来管理定时器的
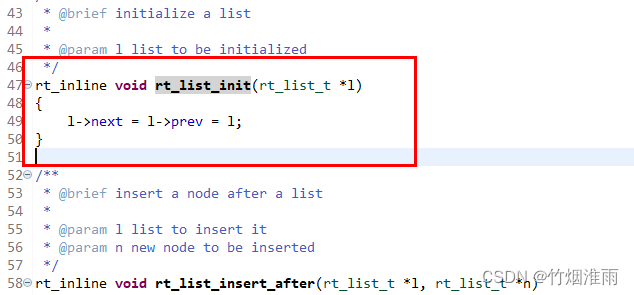
再转到链表定义处,我们可知rt_system_timer_init初始化的是硬件定时器的列表
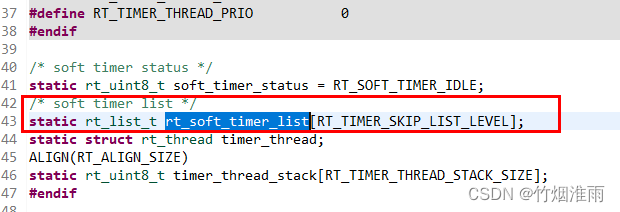
rt_system_timer_thread_init(软件定时器初始化)
/*** @ingroup SystemInit** This function will initialize system timer thread*/
void rt_system_timer_thread_init(void)
{
#ifdef RT_USING_TIMER_SOFTint i;for (i = 0;i < sizeof(rt_soft_timer_list) / sizeof(rt_soft_timer_list[0]);i++){rt_list_init(rt_soft_timer_list + i);}/* start software timer thread */rt_thread_init(&timer_thread,"timer",rt_thread_timer_entry,RT_NULL,&timer_thread_stack[0],sizeof(timer_thread_stack),RT_TIMER_THREAD_PRIO,10);/* startup */rt_thread_startup(&timer_thread);
#endif
}从开始的rt_list_init(rt_soft_timer_list + i);中我们可知软件定时器初始化还是先初始化了一个定时器列表,不过传参传的是软件定时器的列表
转到定义处
然后初静态创建定时器并启动
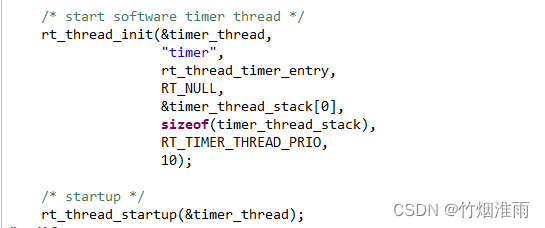
启动完成后会执行线程处理函数rt_thread_timer_entry();
在while(1)中,做了一个超时检测,如果超时则表示软件定时器不存在,则将软件定时器线程挂起,让CPU调度其它线程。否则执行定时器的正常功能。
/* system timer thread entry */
static void rt_thread_timer_entry(void *parameter)
{rt_tick_t next_timeout;while (1){/* get the next timeout tick */next_timeout = rt_timer_list_next_timeout(rt_soft_timer_list);if (next_timeout == RT_TICK_MAX){/* no software timer exist, suspend self. */rt_thread_suspend(rt_thread_self());rt_schedule();}else{rt_tick_t current_tick;/* get current tick */current_tick = rt_tick_get();if ((next_timeout - current_tick) < RT_TICK_MAX / 2){/* get the delta timeout tick */next_timeout = next_timeout - current_tick;rt_thread_delay(next_timeout);}}/* check software timer */rt_soft_timer_check();}
}总结
内核在管理定时器的时候,将定时器分为了两类,一类是硬件定时器,一类是软件定时器,分别挂在不同的列表上进行管理。
定时器工作机制
下面以一个例子来说明 RT-Thread 定时器的工作机制。在 RT-Thread 定时器模块中维护着两个重要的全局变量:
- 当前系统经过的 tick 时间 rt_tick(当硬件定时器中断来临时,它将加 1) ;
- 定时器链表 rt_timer_list。系统新创建并激活的定时器都会按照以超时时间排序的方式插入到rt_timer_list 链表中。
如下图所示,系统当前tick值为20,在当前系统中已经创建并启动了三个定时器,分别是定时时间为50个tick的Timer1、100个tick的Timer2和500个tick的Timer3,这三个定时器分别加上系统
当前时间 rt_tick=20,从小到大排序链接在 rt_timer_list 链表中,形成如图所示的定时器链表结构。
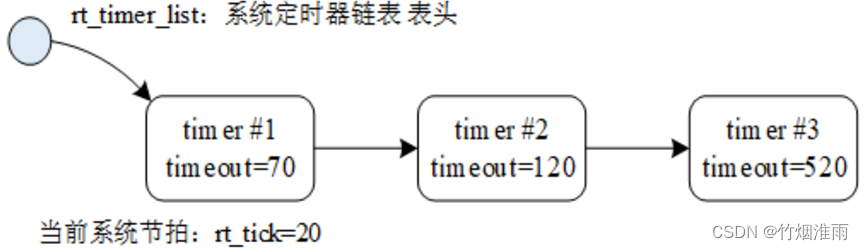
而 rt_tick 随着硬件定时器的触发一直在增长(每一次硬件定时器中断来临,rt_tick 变量会加 1) ,50个tick以后,rt_tick从20增长到70,与Timer1的timeout值相等,这时会触发与Timer1定时器相关联的超时函数,同时将Timer1从rt_timer_list链表上删除。同理,100个tick和500个tick过去后,与Timer2 和 Timer3 定时器相关联的超时函数会被触发,接着将 Time2 和 Timer3 定时器从 rt_timer_list链表中删除。
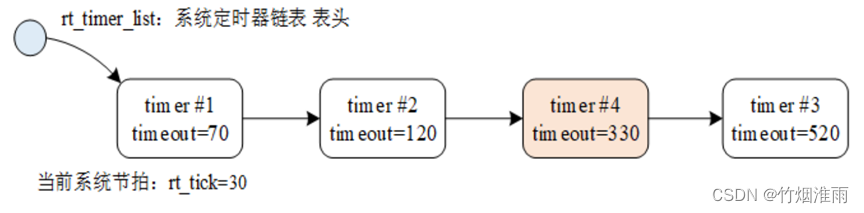
如果系统当前定时器状态在 10 个 tick 以后(rt_tick=30)有一个任务新创建了一个 tick 值为 300 的Timer4定时器,由于Timer4定时器的timeout=rt_tick+300=330,因此它将被插入到Timer2和Timer3定时器中间,形成如下图所示链表结构:
定时器相关接口
启动和停止定时器
/*** This function will start the timer** @param timer the timer to be started** @return the operation status, RT_EOK on OK,-RT_ERROR on error*/rt_err_t rt_timer_start(rt_timer_t timer)若想使它停止,可以使用下面的函数接口:
/*** This function will stop the timer** @param timer the timer to be stopped** @return the operation status, RT_EOK on OK,-RT_ERROR on error*/rt_err_t rt_timer_stop(rt_timer_t timer)动态创建定时器
动态创建一个定时器和删除定时器
创建定时器
其中参数2:指向定时超时的回调函数(定时器中断函数),来处理当前的超时事件
参数3:为传递给超时函数的参数
参数4:为定时器时间,单位为节拍数
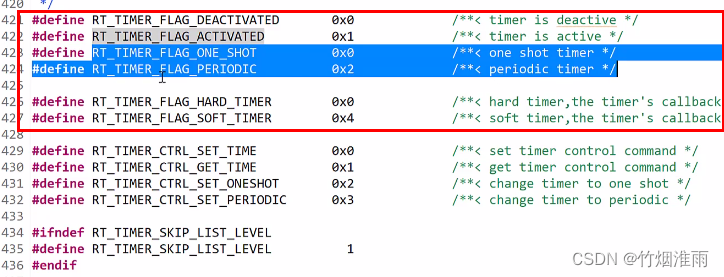
/*** This function will create a timer** @param name the name of timer* @param timeout the timeout function* @param parameter the parameter of timeoutfunction* @param time the tick of timer* @param flag the flag of timer* #define RT_TIMER_FLAG_ONE_SHOT 0x0 /**< one shot timer */
* #define RT_TIMER_FLAG_PERIODIC 0x2 /**< periodic timer */
* #define RT_TIMER_FLAG_HARD_TIMER 0x0 /**< hard timer,the timer's callbackfunction will be called in tick isr. */
* #define RT_TIMER_FLAG_SOFT_TIMER 0x4 /**< soft timer,the timer's callback function will be called in timerthread. */
* @return the created timer object
*/
rt_timer_t rt_timer_create(const char*name,void (*timeout)(void*parameter),void *parameter,rt_tick_t time,rt_uint8_t flag)其中flag可以传入以下标志
RT_TIMER_FLAG_ONE_SHOT表示单次触发
RT_TIMER_FLAG_PERIODIC表示周期性的触发
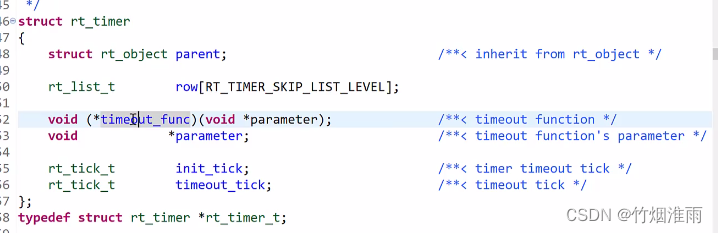
返回值为一个结构体指针

结构体描述当前定时器的信息
删除定时器
传入参数为定时器的结构体指针,返回值为错误码:正确为RT_EOK,错误为负的RT_ERROR
/*** This function will delete a timer andrelease timer memory** @param timer the timer to be deleted** @return the operation status, RT_EOK on OK;-RT_ERROR on error*/
rt_err_t rt_timer_delete(rt_timer_t timer)实例
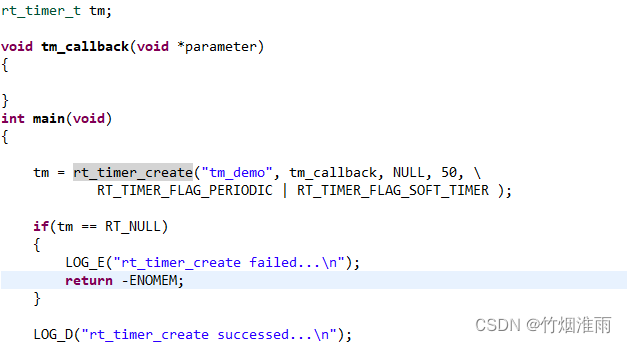
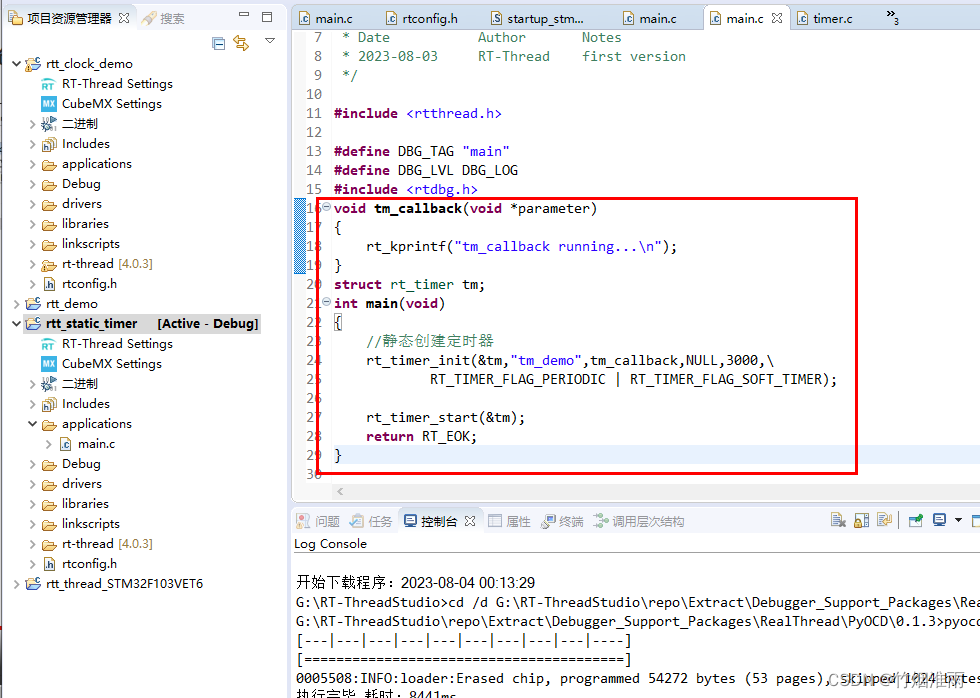
首先对动态创建定时器函数进行参数配置,其中标志使用了周期性触发和使用软件定时器。然后定义中断函数,创建一个定时器结构体指针来接收返回值,如果创建失败就返回-没有内存
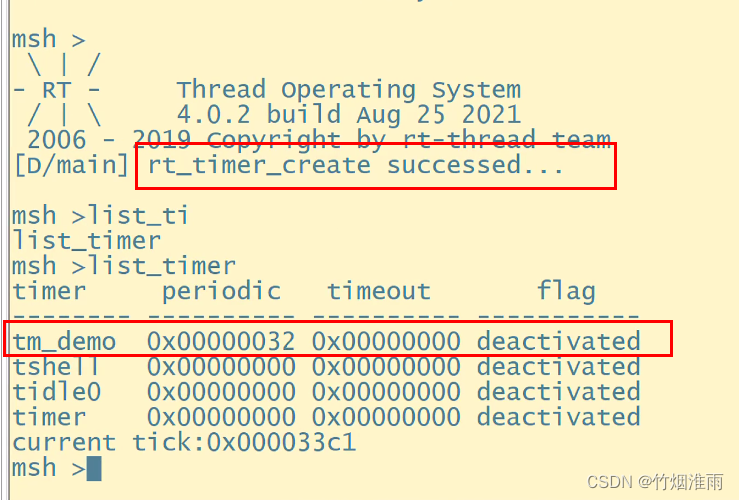
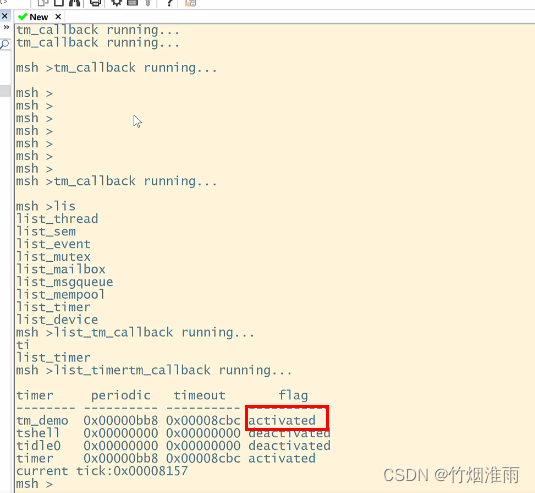
运行效果
其中timer里面显示了四个定时器,包括了自己创建的tm_demo,处于deactivated未活动的状态,其它三个定时器为系统创建的tshell、tidle0和timer
完善超时处理函数的内容,3s打印一次数据;启动定时器
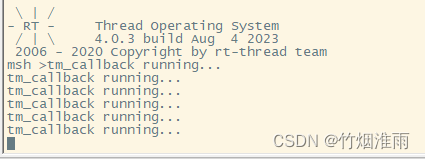
运行效果
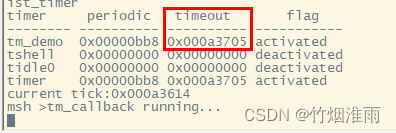
可以发现定时器状态已经开启
静态创建定时器
初始化定时器
/*** This function will initialize a timer,normally this function is used to* initialize a static timer object.** @param timer the static timer object (typedef struct rt_timer *rt_timer_t;)* @param name the name of timer* @param timeout the timeout function* @param parameter the parameter of timeoutfunction* @param time the tick of timer* @param flag the flag of timer*/
void rt_timer_init(rt_timer_t timer,const char *name,void (*timeout)(void*parameter),void *parameter,rt_tick_t time,rt_uint8_t flag)脱离定时器
静态定时器不需要再使用时,可以使用下面的函数接口脱离定时器:
/*** This function will detach a timer from timermanagement.** @param timer the static timer object** @return the operation status, RT_EOK on OK;RT_ERROR on error*/
rt_err_t rt_timer_detach(rt_timer_ttimer)实例
运行结果
当前时间节拍数
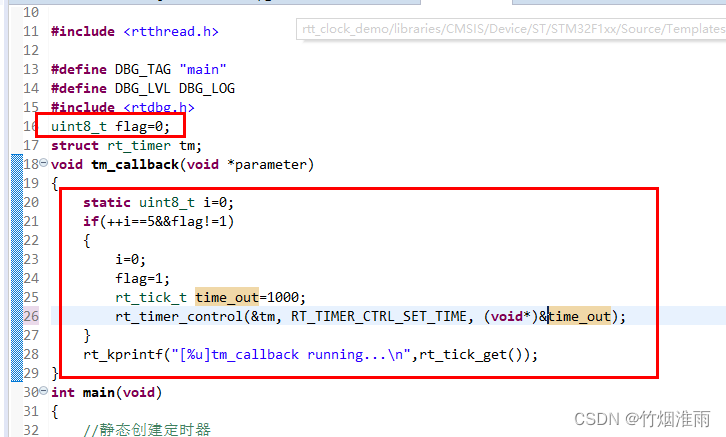
控制定时器
/*** This function will get or set some optionsof the timer** @param timer the timer to be get or set* @param cmd the control command* @param arg the argument* #define RT_TIMER_CTRL_SET_TIME 0x0 /**< set timer control command*/* #define RT_TIMER_CTRL_GET_TIME 0x1 /**< get timer control command*/* #define RT_TIMER_CTRL_SET_ONESHOT 0x2 /**< change timer to one shot */
* #defineRT_TIMER_CTRL_SET_PERIODIC 0x3 /**< change timer to periodic*/
* @return RT_EOK
*/
rt_err_t rt_timer_control(rt_timer_t timer, int cmd, void *arg)实例
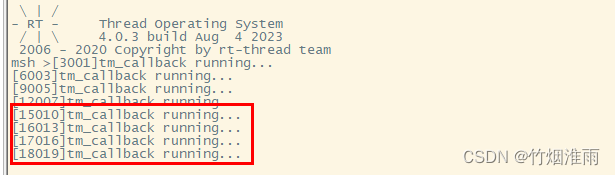
以重新设置定时器时间为例,15s中后修改定时节拍数为1000
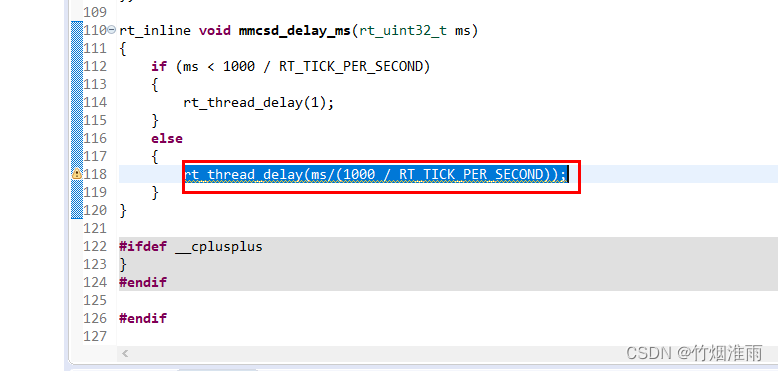
高精度延时
注意:这个函数只支持低于1个OS Tick(系统节拍)的延时, 否则SysTick会出现溢出而不能够获得指定的延时时间
一般用于IIC、SPI等总线通信
/*** This function will delay for some us.** @param us the delay time of us*/
void rt_hw_us_delay(rt_uint32_t us)相关文章:
RTT(RT-Thread)时钟管理
目录 时钟管理 时钟节拍 RTT工程目录结构介绍 配置文件:rtconfig.h 获取系统节拍 获取系统节拍数函数 实例 定时器 RT_Thread定时器介绍 定时器源码分析(了解即可) rt_system_timer_init (硬件定时器初始化) rt_system_timer_thr…...

基础实验篇 | uORB消息读写与自定义实验(二)
导读 uORB是PX4/Pixhawk系统中非常重要且关键的模块之一,是用于无人机模块间通信的协议机制。本篇将详细介绍uORB并详细拆解uORB消息读写与自定义实验全流程(二)。 基础实验篇 | uORB消息读写与自定义实验(二) 01 RflySim平台的uORB消息读写…...
k8s pod数据存储Volumes
一、说在前面的话 在 Kubernetes 的 Deployment 中,您可以使用多种类型的 Volumes 来管理 Pod 中的数据。 作用是用来共享目录及配置,不用在每个pod里进行配置。 本文主要概述怎么使用HostPath、PersistentVolumeClaim、ConfigMap。 二、k8s有哪些Vol…...

ZYNQ在Petalinux系统下双网口同网段的实现
ZYNQ在Petalinux系统下双网口同网段的实现 1.开发环境 采用了赛灵思zynq xc7z100芯片,外部挂载了两个网口phy芯片(marvell 88e1510),且两个网口phy芯片公用MDIO管脚,bd配置如下: 2.问题说明 忙去了&am…...
突破传统监测模式:业务状态监控HM的新思路 | 京东云技术团队
一、传统监控系统的盲区,如何打造业务状态监控。 在系统架构设计中非常重要的一环是要做数据监控和数据最终一致性,关于一致性的补偿,已经由算法部的大佬总结过就不再赘述。这里主要讲如何去补偿?补偿的方案哪些?这就…...
)
7-16 验证“哥德巴赫猜想” (20 分)
7-16 验证“哥德巴赫猜想” (20 分) 数学领域著名的“哥德巴赫猜想”的大致意思是:任何一个大于2的偶数总能表示为两个素数之和。比如:24519,其中5和19都是素数。本实验的任务是设计一个程序,验证20亿以内的偶数都可以…...
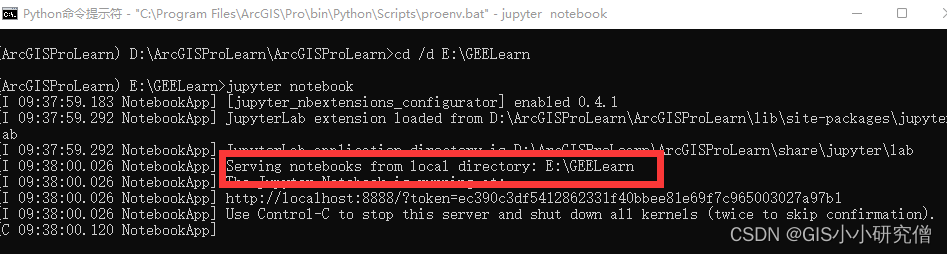
GEE学习02 --设置Jupyter Notebook的打开路径
直接双击Jupyter Notebook 桌面图标运行时,打开的文件路径是默认的:C:\用户\用户名 如果使用python命令提示符打开jupyter notebook , 而我新建的GEE学习文件夹在另一个路径,可以直接修改默认的保存路径:…...

stm32与上位机电脑间最快的通信方式是什么?
对于小型多关节机械臂的控制电路设计,选择合适的通信方式可以提高MCU与上位机之间的实时性。以下是一些在STM32上常用的通信方式,你可以根据你的具体需求选择适合的: 串口通信(UART):串口通信是一种常见的…...

pytorch学习——卷积神经网络——以LeNet为例
目录 一.什么是卷积? 二.卷积神经网络的组成 三.卷积网络基本元素介绍 3.1卷积 3.2填充和步幅 3.2.1填充(Padding) 填充是指在输入数据周围添加额外的边界值(通常是零),以扩展输入的尺寸。填充可以在卷…...
stm32 mpu6050 cubemx DMP法读取角度
文章目录 前言一、相关文件二、cubemx配置三、代码变量初始化主循环 总结 前言 文件 记录使用dmp库来读取mpu6050的角度。 这是参考文件 参考1–主要参考 github参考 参考2 参考三 一、相关文件 相关文件在这里下载(未填,不过可以在上面的git中下载&a…...

.Net6 Core Web API 配置 log4net + MySQL
目录 一、导入NuGet 包 二、添加配置文件 log4net.config 三、创建MySQL表格 四、Program全局配置 五、帮助类编写 六、效果展示 小编没有使用依赖注入的方式。 一、导入NuGet 包 ---- log4net 基础包 ---- Microsoft.Extensions.Logging.Log4Net…...

校园跑腿小程序运营攻略
作为一名校园跑腿小程序的运营者,你可能会面临诸如用户获取、平台推广、服务质量保证等挑战。在本篇推文中,我将为你提供一些关键的运营策略,帮助你成功运营校园跑腿小程序。 1. 用户获取和留存 用户是校园跑腿小程序成功的关键。以下是一些…...
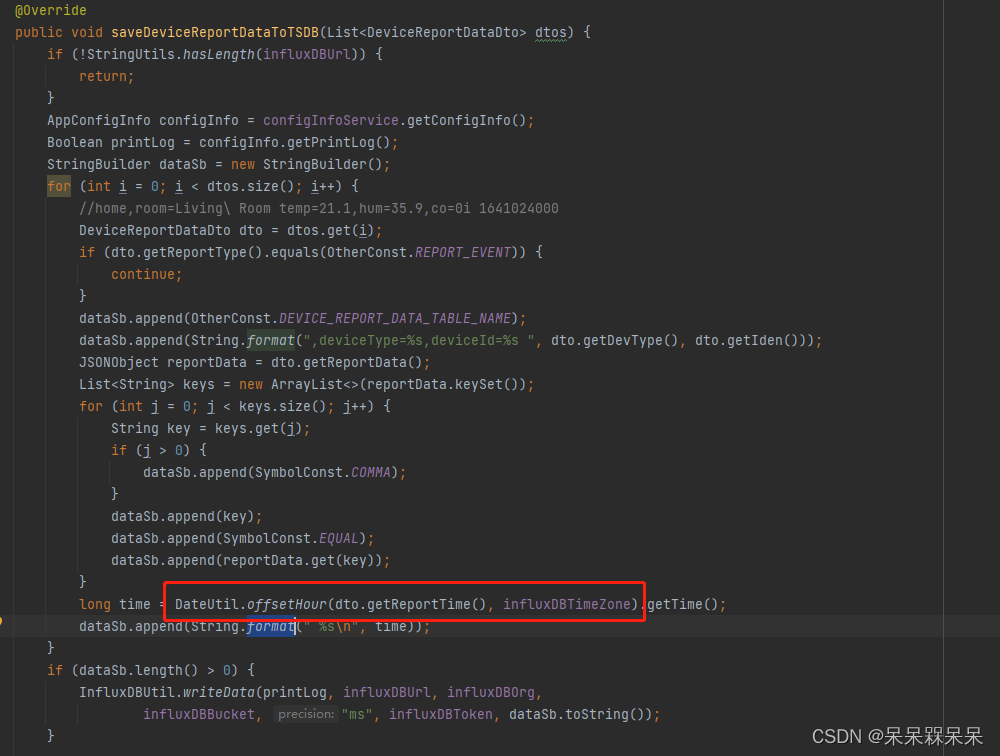
InfluxDB2如何求增量数据
需求 项目中需要接入电表设备,求用电量。 按天和设备统计用电量 按天统计用电量 统计总用电量 存在的问题 difference 函数可以求增量,但是以上计算均存在一个问题,比如xx设备有8.1号和8.2号的数据,我统计每天的用电量…...
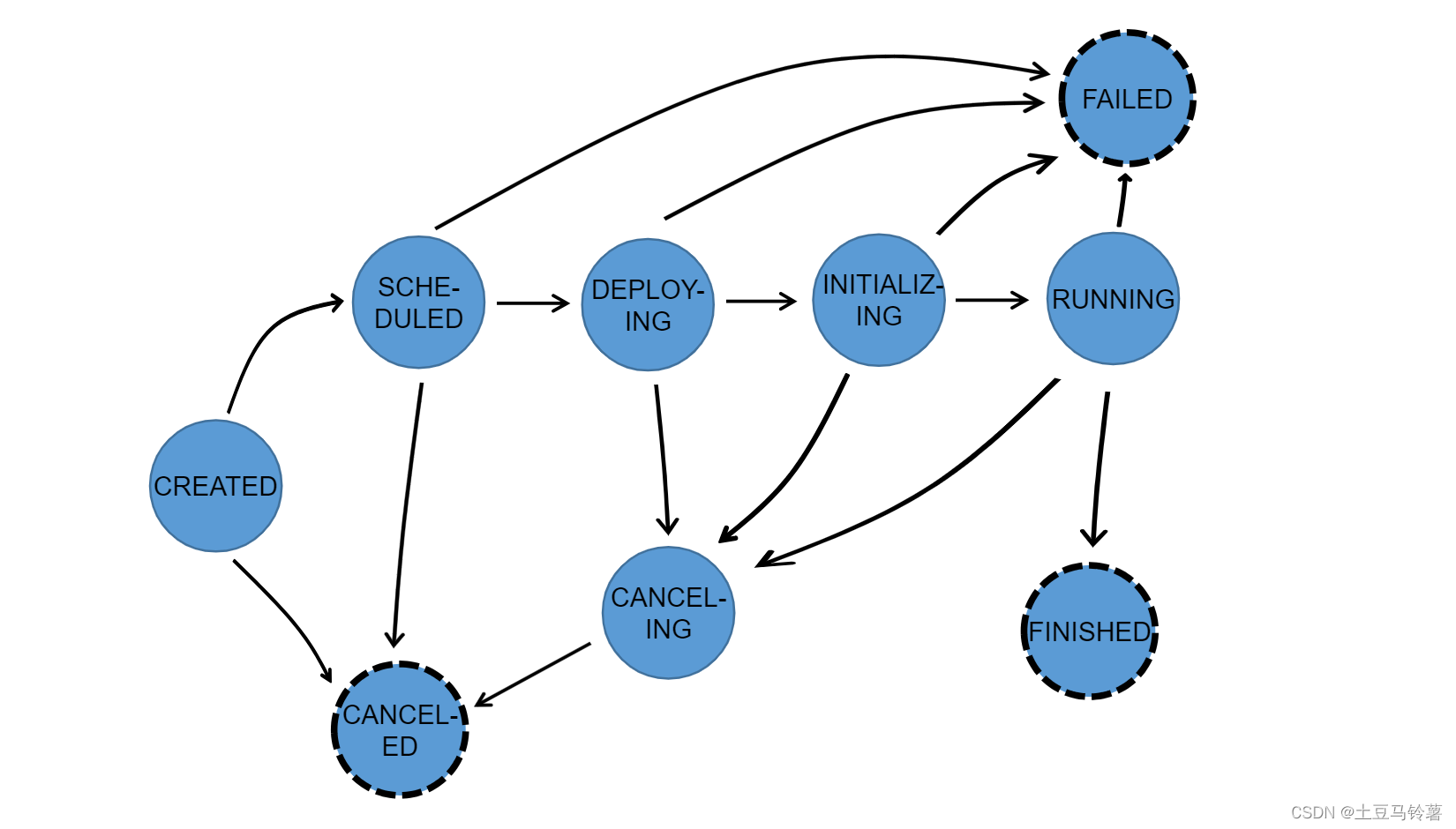
Flink作业调度的9种状态
1.什么是作业调度 Flink 通过 Task Slots 来定义执行资源。每个 TaskManager 有一到多个 task slot,每个 task slot 可以运行一条由多个并行 task 组成的流水线。 这样一条流水线由多个连续的 task 组成,比如并行度为 n 的 MapFunction 和 并行度为 n 的…...

8、Kubernetes核心技术 - ConfigMap
目录 一、ConfigMap概述 二、ConfigMap创建 2.1、命令行方式创建 2.2、yaml 文件方式创建 三、ConfigMap查询 四、ConfigMap更新 4.1、kubectl edit方式 4.2、kubectl apply方式 五、ConfigMap使用 5.1、spec.env 【环境变量】 5.2、spec.envFrom 【环境变量】 5.3…...

音视频--DTMF信号发送及检测
参考资料 https://zh.wikipedia.org/wiki/%E5%8F%8C%E9%9F%B3%E5%A4%9A%E9%A2%91https://www.cnblogs.com/lijingcheng/p/4454932.html 1. DTMF是什么 1.1 DTMF定义 双音多频信号(英语:Dual-Tone Multi-Frequency,简称:DTMF&a…...
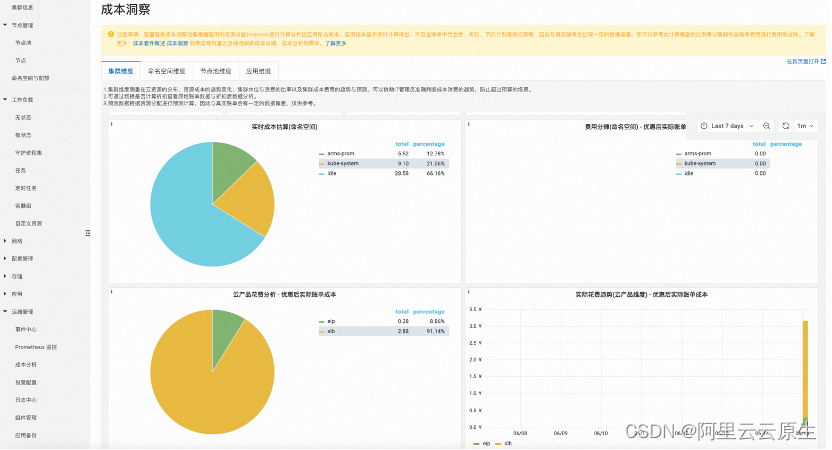
阿里云容器服务助力极氪荣获 FinOps 先锋实践者
作者:海迩 可信云评估是中国信息通信研究院下属的云计算服务和软件的专业评估体系,自 2013 年起历经十年发展,可信云服务评估体系已日臻成熟,成为政府支撑、行业规范、用户选型的重要参考。 2022 年 5 月国务院国资委制定印发《…...

C++ 通过time.windows.com获取时间
C++ 通过time.windows.com获取时间 在C++中,你可以使用 <ctime>头文件中的 time()函数来获取当前的系统时间。然后,你可以使用 <ctime>头文件中的 localtime()函数将时间转换为本地时间,并从中获取小时、分钟和秒。 以下是一个示例代码,演示如何通过time.windo…...
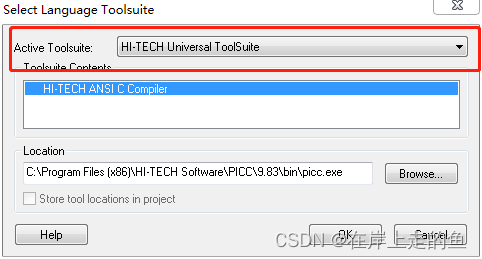
MPLAB加载c文件为什么不能添加到工程中的source files中
MPLAB加载c文件为什么不能添加到工程中的source files中 因为你安装好MAPLAB软件之后你的编译器是默认的编译器,所以当你添加C文件时,软件是不认识C文件的,只有手动的将编译器改成自安装的PICC编译器才能进行C文件的正确加载。 具体修改步骤…...

Tcp的粘包和半包问题及解决方案
目录 粘包: 半包: 应用进程如何解读字节流?如何解决粘包和半包问题? ①:固定长度 ②:分隔符 ③:固定长度字段存储内容的长度信息 粘包: 一次接收到多个消息,粘包 应…...

华为云AI开发平台ModelArts
华为云ModelArts:重塑AI开发流程的“智能引擎”与“创新加速器”! 在人工智能浪潮席卷全球的2025年,企业拥抱AI的意愿空前高涨,但技术门槛高、流程复杂、资源投入巨大的现实,却让许多创新构想止步于实验室。数据科学家…...

HTML 语义化
目录 HTML 语义化HTML5 新特性HTML 语义化的好处语义化标签的使用场景最佳实践 HTML 语义化 HTML5 新特性 标准答案: 语义化标签: <header>:页头<nav>:导航<main>:主要内容<article>&#x…...

java_网络服务相关_gateway_nacos_feign区别联系
1. spring-cloud-starter-gateway 作用:作为微服务架构的网关,统一入口,处理所有外部请求。 核心能力: 路由转发(基于路径、服务名等)过滤器(鉴权、限流、日志、Header 处理)支持负…...

C++ 基础特性深度解析
目录 引言 一、命名空间(namespace) C 中的命名空间 与 C 语言的对比 二、缺省参数 C 中的缺省参数 与 C 语言的对比 三、引用(reference) C 中的引用 与 C 语言的对比 四、inline(内联函数…...
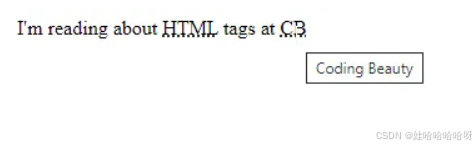
html-<abbr> 缩写或首字母缩略词
定义与作用 <abbr> 标签用于表示缩写或首字母缩略词,它可以帮助用户更好地理解缩写的含义,尤其是对于那些不熟悉该缩写的用户。 title 属性的内容提供了缩写的详细说明。当用户将鼠标悬停在缩写上时,会显示一个提示框。 示例&#x…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...
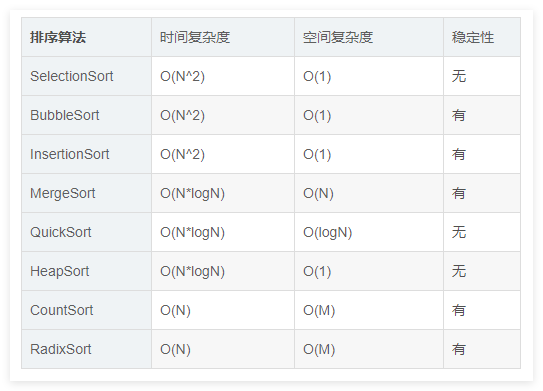
排序算法总结(C++)
目录 一、稳定性二、排序算法选择、冒泡、插入排序归并排序随机快速排序堆排序基数排序计数排序 三、总结 一、稳定性 排序算法的稳定性是指:同样大小的样本 **(同样大小的数据)**在排序之后不会改变原始的相对次序。 稳定性对基础类型对象…...

4. TypeScript 类型推断与类型组合
一、类型推断 (一) 什么是类型推断 TypeScript 的类型推断会根据变量、函数返回值、对象和数组的赋值和使用方式,自动确定它们的类型。 这一特性减少了显式类型注解的需要,在保持类型安全的同时简化了代码。通过分析上下文和初始值,TypeSc…...

MySQL 部分重点知识篇
一、数据库对象 1. 主键 定义 :主键是用于唯一标识表中每一行记录的字段或字段组合。它具有唯一性和非空性特点。 作用 :确保数据的完整性,便于数据的查询和管理。 示例 :在学生信息表中,学号可以作为主键ÿ…...
关于easyexcel动态下拉选问题处理
前些日子突然碰到一个问题,说是客户的导入文件模版想支持部分导入内容的下拉选,于是我就找了easyexcel官网寻找解决方案,并没有找到合适的方案,没办法只能自己动手并分享出来,针对Java生成Excel下拉菜单时因选项过多导…...