无人驾驶实战-第一课(自动驾驶概述)
无人驾驶汽车是可载人的移动智能机器人,通过丰富感知系统和智能的行为系统实现高效率高可靠性的驾驶能力。
无人驾驶:完全不依赖于人的行为自动驾驶:某些情况下可以加入人的参与和监督










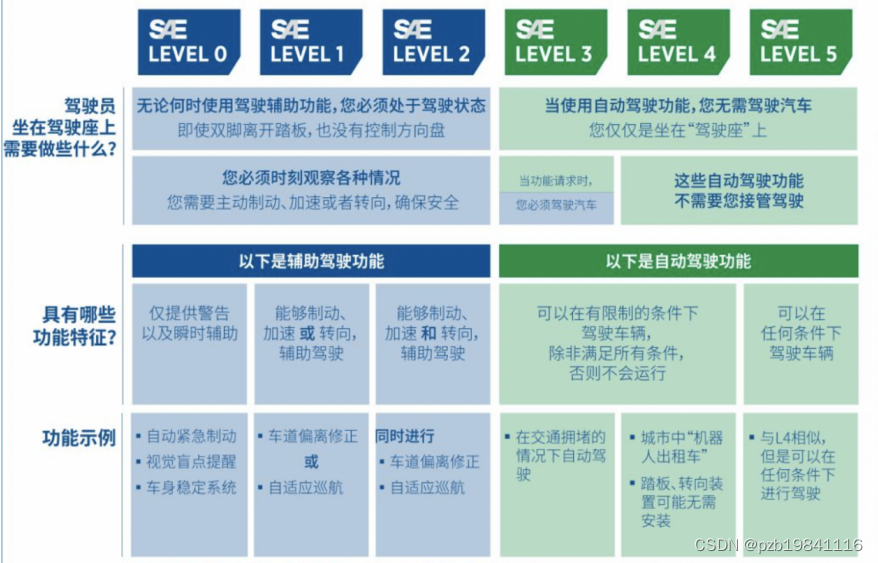
- 驾驶员需要对安全负责
- 启动条件要求不高(速度和车道线)
- 早期采用Mobileye提供感知技术
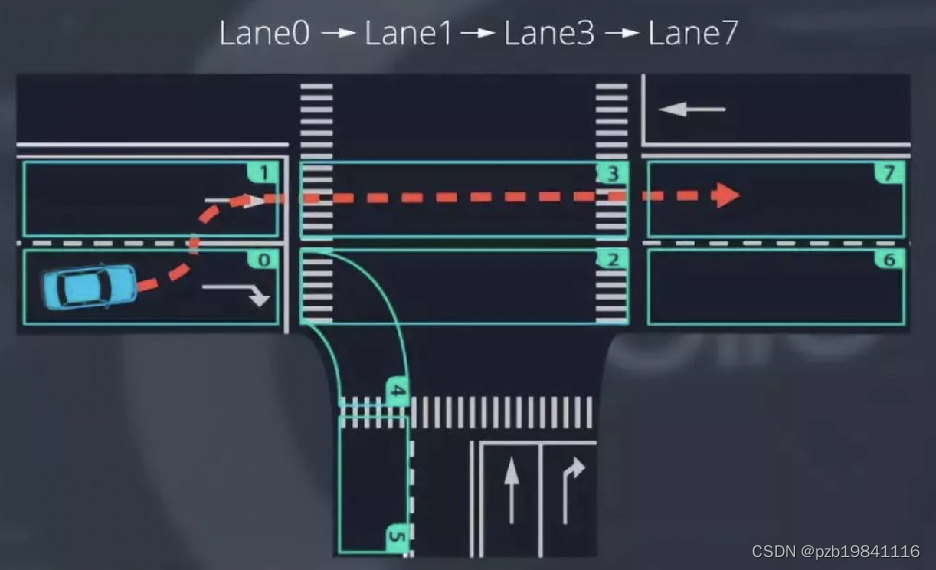
- 无法解决复杂路口问题
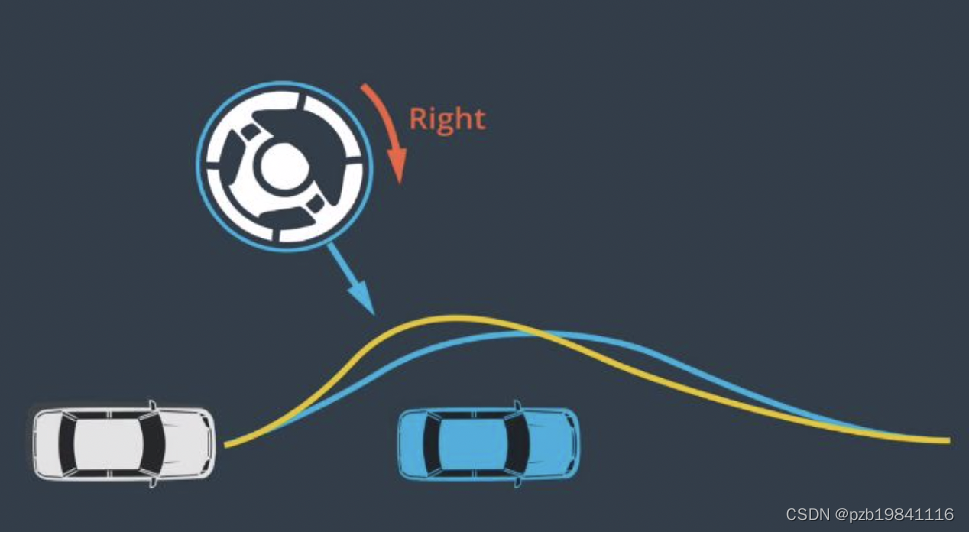
- 主动变道需要人提供变道指示

- L3 自动驾驶自动驾驶期间,车辆负全部责任
- 自动驾驶能力进入条件苛刻(多车道线、60km/h以下、天气良好)
- 目前智能性最好的量产车
- 暂时没有主动变道能力
- 遇到紧急情况或者不符合条件的情况需要通知驾驶员接管,有10s时间


- L4 全自动驾驶
- 曾有一段时间取消了安全员
- 商业运营阶段
- 世界最领先的自动驾驶能力
- 成本昂贵

- 特殊场景下的Level 4能力
- 物流配送车
- 成本要求不能太高
- 可以不用考虑乘坐体感
- 相关物流公司都有布局,比如:京东、美团、阿里菜鸟等等

- 实现思路:V2X:Vehicle to Everything(车路协同): V2V(车辆), V2I(公共设施), V2P(行人)
- 边缘计算:RSU(路侧单元)、OBU(车载单元)
- 5G通信能力:LTE-V协议,专门针对车间通讯的协议,可兼容4G-5G
- 路侧智能:强大的感知能力(百度ACE计划)
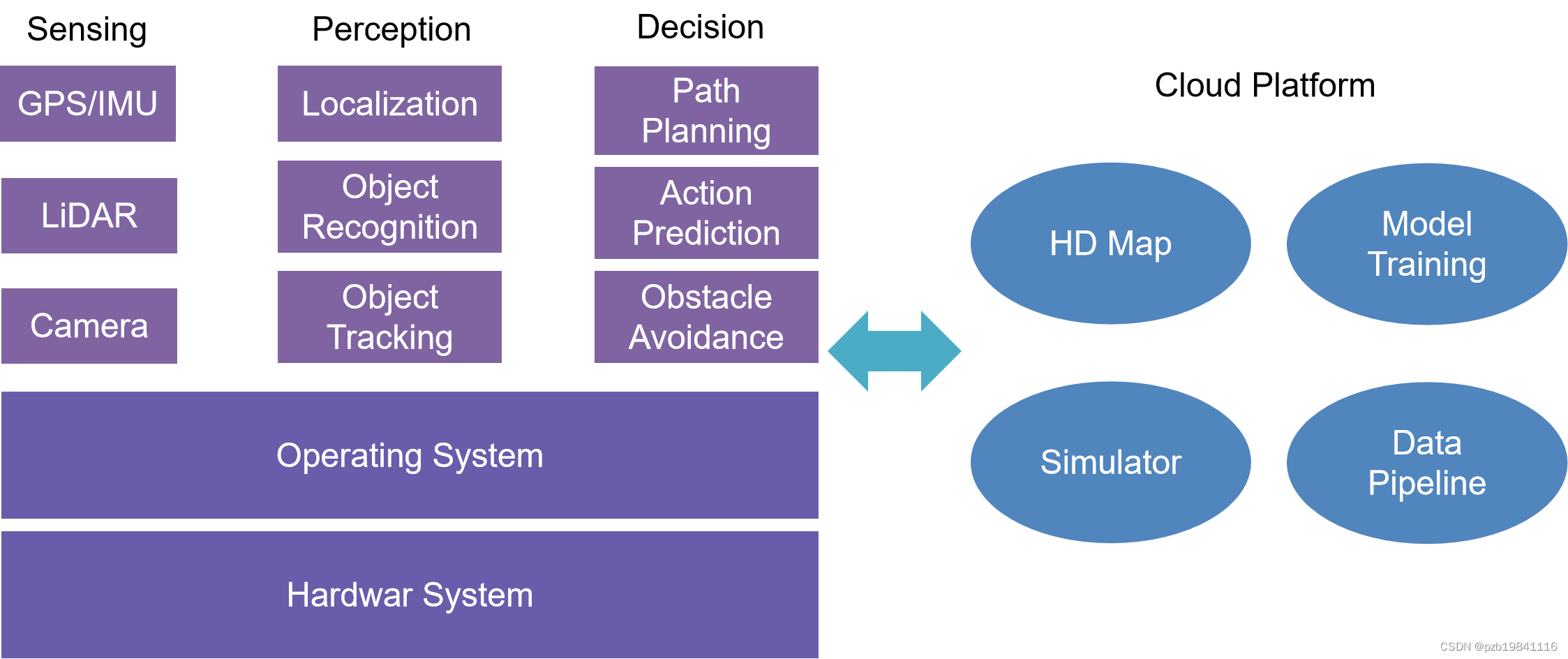
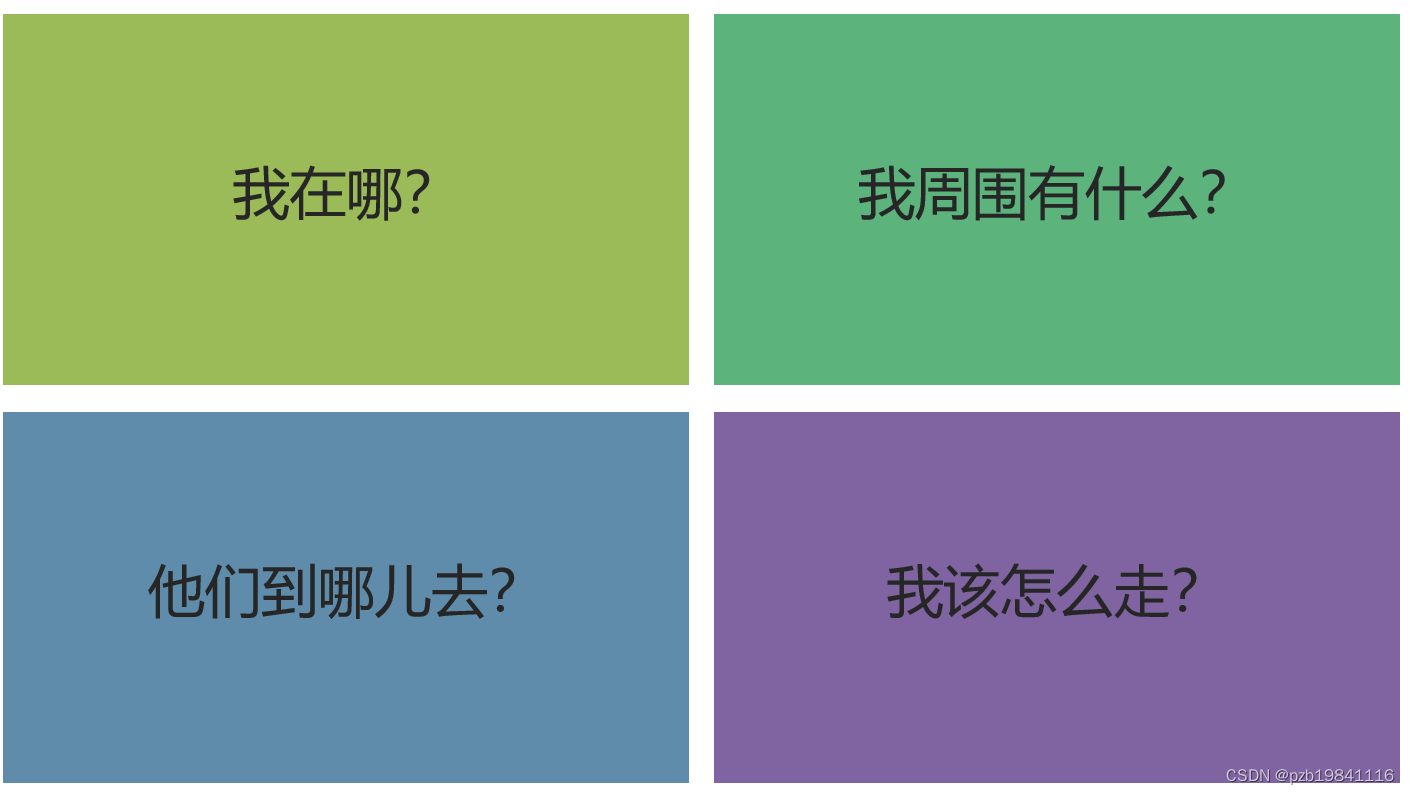
- 主车智能:近些年深度学习填补上了最后一块软件难题
- 感知能力:高度复杂冗余的传感器
- 决策能力:大数据下的智能决策
- 高精地图:丰富的地图信息数据
- 定位:精准的位置获取能力 通过学习人类开车的方式,来构建整个主车智能系统













- 不同于导航地图,最大的特点就是高维度和高精度
- 道路网的精确三维表征,如交叉路口布局和路标位置
- 地图语义信息,如道路的速度限制、 左转车道开始的位置 、
- 导航地图只能达到米级精度,高精地图需要能够达到厘米级的精度
- 高精地图坐标系: WGS84、墨卡托坐标系

- 高精地图提供其它Level 4模块的数据支持提供了很多准确的静态物体的信息
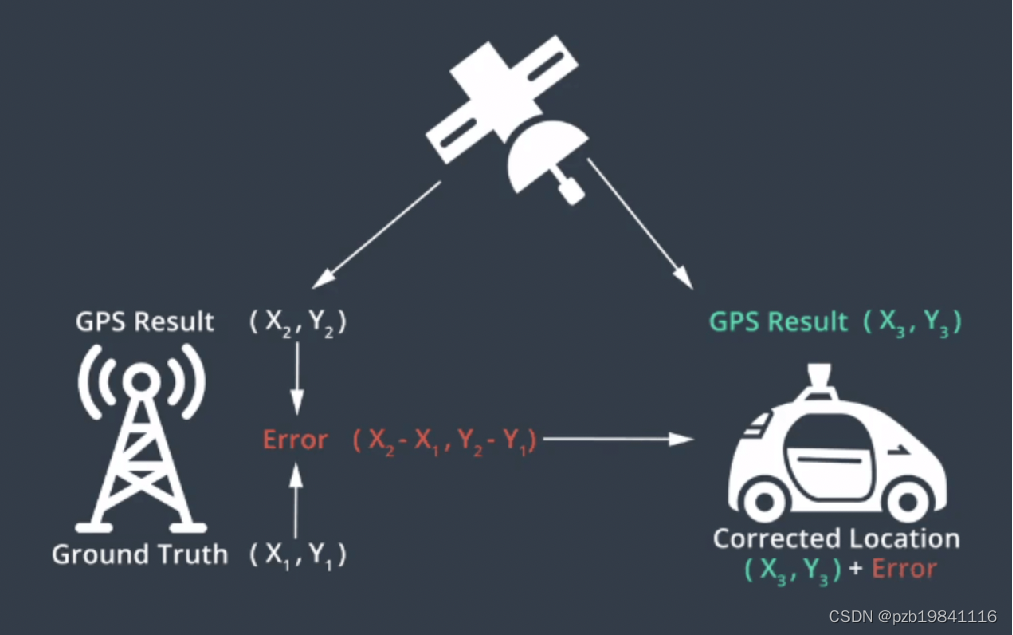
- 定位可以用于计算相对位置
- 帮助传感器缩小检测范围,缩小感兴趣区域ROI
- 计算道路导航信息
- 帮助车辆识别车道的确切中心线




- 数学问题转换:将物理世界的地图转化为数学上的图表达
- 最优路径搜索:由于其他软件模块已经将不确定性进行了最大程度的消除,而最终决策规划模块又是对稳定性要求极高的模块,因此可以通过数学上的最优路径求解出确定解,遍历最优解是非常耗时的。
- 需要考虑车辆的体感和安全性
相关文章:
无人驾驶实战-第一课(自动驾驶概述)
在七月算法上报了《无人驾驶实战》课程,老师讲的真好。好记性不如烂笔头,记录一下学习内容。 课程入口,感兴趣的也可以跟着学一下。 ————————————————————————————————————————— 无人驾驶汽车的定义…...

15.节点操作
15.1 DOM节点 1.DOM节点 DOM树里每一个内容都称之为节点 2.节点类型 ●元素节点 所有的标签 比如body、div html是根节点 ●属性节点 所有的属性 比如href ●文本节点 所有的文本 15.2查找节点 1.父节点查找: parentNode属性 返回最近一级的父节点找不到返回为n…...

C语言自定义类型 — 结构体、位段、枚举、联合
前言 本期主要对通讯录三篇博客文章进行补充 通讯录文章:通讯录系列文章 对结构体进行详细介绍,其次讲解位段、枚举、联合体 文章目录 前言一、结构体1.什么是结构体2.结构声明2.1 声明格式2.2 如何声明(代码演示) 3.特殊声明3.1…...
新手指南:流程图中各种图形的含义及用法解析
我们经常在技术设计、沟通、业务演示等一些领域看到流程图,它也可以称为输入输出图。顾名思义,它是指一种简单的工作流程的具体步骤,比如包括一次会议的流程,以及一次生产制造的顺序和过程等。本文将为大家介绍流程图的含义和具体…...

【知识产权】专利的弊端
接上篇【知识产权】著作权的作用_qilei2010的博客-CSDN博客。 1 专利的分类 首先,专利分为:发明专利、实用新型专利、外观设计专利。这里要说明的是专利的不同种类在不同的国家都是有不同规定的,并不是所有国家和地区都是分成这三类。 >国家法律法规数据库 >中华…...

用Rust实现23种设计模式之抽象工厂
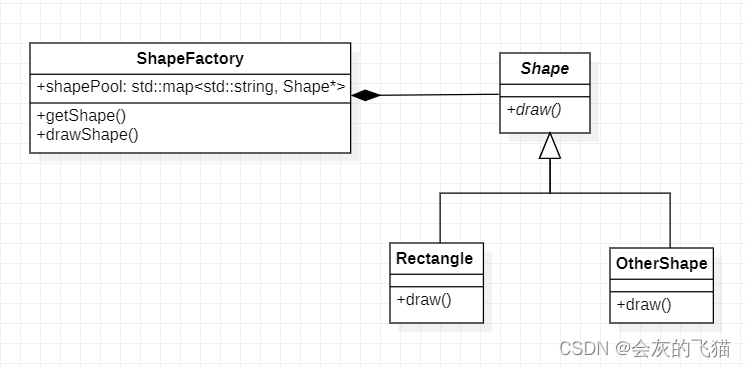
在 Rust 中,可以使用 trait 和泛型来实现抽象工厂模式。抽象工厂模式是一种创建型设计模式,它提供了一个接口来创建一系列相关或依赖对象的家族,而无需指定具体的类。下面是一个简单的示例,展示了如何使用 Rust 实现抽象工厂模式&…...

31.利用linprog 解决 投资问题(matlab程序)
1.简述 语法:[X,FVAL] linprog(f,a,b,Aeq,Beq,LB,UB,X0); X 为最终解 , FVAL为最终解对应的函数值 *注意:求最大值时,结果FVAL需要取反* f 为决策函数的系数矩阵。 *注意:当所求为最大值…...

整数线性规划求解工具isl使用方法
整数线性规划求解工具 Integer Set Library 代码 参考 isl是一个用于多面体模型调度实现的c/c库。通过isl,我们可以对模型进行自动的调度,循环优化等。 编译 ISL,Integer Set Library 版本0.22.1,http://isl.gforge.inria.fr/ README关于…...
SystemC的调度器
文章目录 前言调度器初始化evaluatewait updatenotify delta notificationtime notification仿真结束 前言 SystemC是基于C的库,主要用来对 IC 进行功能建模和性能建模。有时也被用来当做 RTL (register transfer level) 级的升级版 HLS(High Level synthesis) 直接…...

SpringBoot、SpringCloud 版本查看
1、SpringBoot 官网地址 https://spring.io/projects/spring-boot#learn spring-boot-starter-parent 版本列表可查看: https://mvnrepository.com/artifact/org.springframework.boot/spring-boot-starter-parent 2、SpringCloud 官网地址 https://spring.io/pro…...
AI Chat 设计模式:12. 享元模式
本文是该系列的第十二篇,采用问答式的方式展开,问题由我提出,答案由 Chat AI 作出,灰色背景的文字则主要是我的一些思考和补充。 问题列表 Q.1 给我介绍一下享元模式A.1Q.2 也就是说,其实共享的是对象的内部状态&…...

Spring mvc:SpringServletContainerInitializer
SpringServletContainerInitializer实现了Servlet3.0规范中定义的ServletContainerInitializer: public interface ServletContainerInitializer {void onStartup(Set<Class<?>> c, ServletContext ctx) throws ServletException; }SpringServletCont…...
微信小程序中的全局数据共享(状态管理)使用介绍
开发工具:微信开发者工具Stable 1.06 一、状态管理简介 微信小程序全局状态是指可以在不同页面之间共享的数据或状态。 它可以存储用户的登录状态、个人信息、全局配置信息等。 二、安装MobX 1、安装NPM 在资源管理器的空白地方点右键,选择“在外部…...
LLM - LLama 模型读取报错 TypeError: not a string
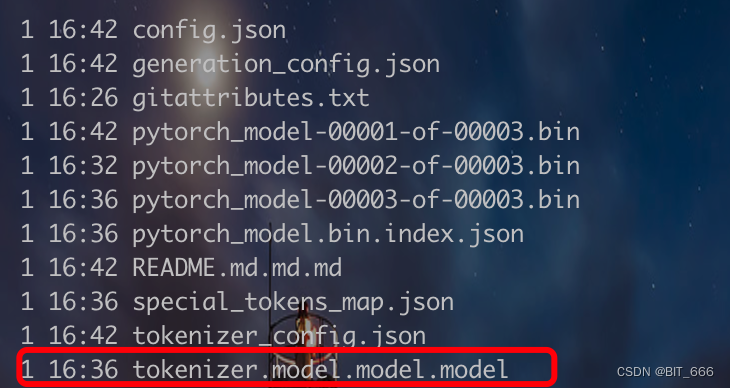
一.引言 读取 LLama2 模型时报错 TypeError: not a string 看异常栈是 AutoTokenizer.from_pretrained 时候的异常。 二.问题解决 出现类似加载模型异常的问题,大致分两类: ◆ 模型地址异常 脚本里传的 pretrained_model Path 有问题,加 …...

2023年08月在线IDE流行度最新排名
点击查看最新在线IDE流行度最新排名(每月更新) 2023年08月在线IDE流行度最新排名 TOP 在线IDE排名是通过分析在线ide名称在谷歌上被搜索的频率而创建的 在线IDE被搜索的次数越多,人们就会认为它越受欢迎。原始数据来自谷歌Trends 如果您相…...

k8s的架构
简介 一个 K8s 系统,通常称为一个 K8s 集群,集群主要包括两个部分 一个 Master 节点(主节点) 一群 Node 节点(计算节点) Master节点 Master 节点包括 API Server、Scheduler、Controller manager、etcd A…...
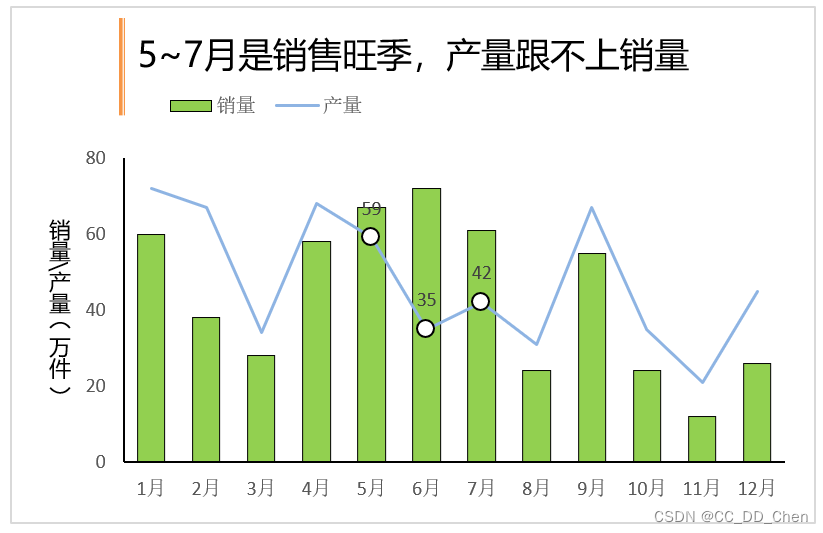
数据分析基础-Excel图表的美化操作(按照教程一步步操作)
一、原始数据 包含月份和对应的销量和产量。 时间销量产量1月60722月38673月28344月58685月67596月72357月61428月24319月556710月243511月122112月2645 二、原始的图表设计-采用Excel自带模板 三、优化思路 1、删除多余元素 2、弱化次要元素 对于可以弱化的元素,…...
)
Mybatis嵌套查询(一对多)
一、返回数据Java类 Data public class PersonnelDetailsVO{/*** 主键*/Column(name "ID", length 36, precision 0)private String id;/*** 人员姓名*/Column(name "OPERATE_NAME", length 36, precision 0)private String operateName;/*** 单位i…...

web前端转正工作总结范文5篇
web前端转正工作总结(篇1) 来到__有限公司已经三个月了,目前的工作是前端开发,我是一名应届毕业生,之前没有过工作经验,在刚来到__这个大家庭的时候,我就被这里的工作气氛深深地吸引࿰…...

P1144 最短路计数
最短路计数 题目描述 给出一个 N N N 个顶点 M M M 条边的无向无权图,顶点编号为 1 ∼ N 1\sim N 1∼N。问从顶点 1 1 1 开始,到其他每个点的最短路有几条。 输入格式 第一行包含 2 2 2 个正整数 N , M N,M N,M,为图的顶点数与边数…...

保姆级教程:用Android Studio 2024.3.2 + ncnn,把YOLOv11模型部署到你的安卓手机上
从零开始:用Android Studio与ncnn实现YOLOv11安卓端高效部署实战 当你第一次听说能在手机上运行目标检测模型时,是不是既兴奋又忐忑?作为计算机视觉领域的标杆算法,YOLO系列以其实时性著称,而最新发布的YOLOv11更是将精…...

ComfyUI节点冲突终极解决方案:从检测到修复的完整实战指南
ComfyUI节点冲突终极解决方案:从检测到修复的完整实战指南 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various c…...

告别选择困难:LT8712SX方案如何帮你搞定Type-C转双HDMI2.0/DP1.4的显示器扩展难题
多屏办公革命:LT8712SX芯片如何实现Type-C一线连双4K显示器的完美方案 当你的MacBook Pro连接扩展坞时,是否遇到过第二块屏幕突然黑屏的尴尬?或是花高价买的Type-C转HDMI线材只能输出4K30Hz的卡顿画面?这些困扰数百万办公族的难题…...
煌)
AI开发-python-langchain框架(--AI 直接生成并执行 Python 代码 )煌
指令替换 项目需求:将加法指令替换为减法 项目目录如下 /MyProject ├── CMakeLists.txt # CMake 配置文件 ├── build/ #构建目录 │ └── test.c #测试编译代码 └── mypass2.cpp # pass 项目代码 一,测试代码示例 test.c // test.c #includ…...

PowerToys终极指南:5个技巧解决Windows效率工具常见问题
PowerToys终极指南:5个技巧解决Windows效率工具常见问题 【免费下载链接】PowerToys Microsoft PowerToys is a collection of utilities that supercharge productivity and customization on Windows 项目地址: https://gitcode.com/GitHub_Trending/po/PowerTo…...

CVPR 2024最佳学生论文Mip-Splatting:手把手教你从零配置环境到跑通第一个3D场景
CVPR 2024最佳学生论文Mip-Splatting:从零配置环境到跑通第一个3D场景 当3D Gaussian Splatting遇上抗锯齿技术,CVPR 2024最佳学生论文Mip-Splatting为实时神经渲染领域带来了突破性进展。不同于传统方法在视角变化时出现的走样问题,这项技术…...

GPUStack 在华为昇腾 I A 服务器上的保姆级部署指南参
开发个什么Skill呢? 通过 Skill,我们可以将某些能力进行模块化封装,从而实现特定的工作流编排、专家领域知识沉淀以及各类工具的集成。 这里我打算来一次“套娃式”的实践:创建一个用于自动生成 Skill 的 Skill,一是用…...

功能强大,这些AI工具让写作效率翻倍
在科技高速发展的2026年,AI技术的爆发式迭代为我们提供了办公效率的利器。对于耗时耗力的写作任务,我们已经不用像之前一样死磕,借助AI工具能实现效率与创意双重提升!今天介绍的这些功能强大的AI工具,能让你的写作效率…...

AltDrag终极指南:彻底改变Windows窗口操作的革命性工具
AltDrag终极指南:彻底改变Windows窗口操作的革命性工具 【免费下载链接】altdrag :file_folder: Easily drag windows when pressing the alt key. (Windows) 项目地址: https://gitcode.com/gh_mirrors/al/altdrag 你是否厌倦了每次都要精确点击窗口标题栏才…...

RAG的完整链路拆解:从文档切片到向量检索到LLM回答
RAG是目前最主流的破解方案:不改模型,而是在回答之前先去知识库里把相关信息捞出来,跟问题一起喂给LLM。LLM从万事通变成了带参考资料的答题者。 上篇我们搞清了一件事:LLM的知识边界就是训练数据的边界。超出这个边界它不会说不知…...