Godot 4 源码分析 - Path2D与PathFollow2D
学习演示项目dodge_the_creeps,发现里面多了一个Path2D与PathFollow2D

研究GDScript代码发现,它主要用于随机生成Mob
var mob_spawn_location = get_node(^"MobPath/MobSpawnLocation")mob_spawn_location.progress = randi()# Set the mob's direction perpendicular to the path direction.var direction = mob_spawn_location.rotation + PI / 2# Set the mob's position to a random location.mob.position = mob_spawn_location.position# Add some randomness to the direction.direction += randf_range(-PI / 4, PI / 4)mob.rotation = direction# Choose the velocity for the mob.var velocity = Vector2(randf_range(150.0, 250.0), 0.0)mob.linear_velocity = velocity.rotated(direction)这个有这么大的作用,不明觉厉
但不知道如何下手
查看源码,有编辑器及类源码
先从应用角度,到B站上找找有没有视频,结果发现这个
Godot塔防游戏 - 01 -核心路径制作 Path2D_哔哩哔哩_bilibili
看了之后,就知道使用方法了:
- 添加Path2D
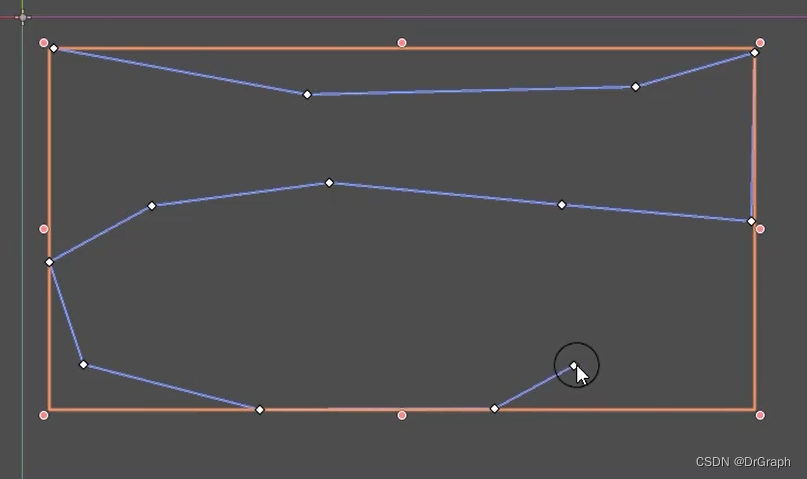
- 在编辑器中设置路径各关键点,形成路径
- 在Path2D下增加PathFollow2D
这就OK了。剩下的就是使用
所谓使用,输入为PathFollow2D的progress,输出为路径上的点信息(position, rotation...),然后用户再根据这些信息去确定相应的属性
比如演示项目中,Path2D定制了一个外框路径(左上角 > 右上角 > 右下角 > 左下角 > 左上角),在生成MOB时,随机指定其下的PathFollow2D的progress值为randi(),即为0 ~ 2^32 - 1的随机整数。因为路径是有长度的,本例中为2400,randi()值将按2400取模得到最终的随机值0 - 2399,当然也可以归一化,设置其progress_ratio值为0.0 - 1.0,意思一样。
查看源码,set_progress的逻辑不只是取模,还有限制范围。即PathFollow2D还有一个Loop属性,如果Loop为真,才会取模,为false时,会直接限制在路径长度范围内 progress = CLAMP(progress, 0, path_length); 之后统一更新_update_transform
void PathFollow2D::set_progress(real_t p_progress) {ERR_FAIL_COND(!isfinite(p_progress));progress = p_progress;if (path) {if (path->get_curve().is_valid()) {real_t path_length = path->get_curve()->get_baked_length();if (loop && path_length) {progress = Math::fposmod(progress, path_length);if (!Math::is_zero_approx(p_progress) && Math::is_zero_approx(progress)) {progress = path_length;}} else {progress = CLAMP(progress, 0, path_length);}}_update_transform();}
}void PathFollow2D::_update_transform() {if (!path) {return;}Ref<Curve2D> c = path->get_curve();if (!c.is_valid()) {return;}real_t path_length = c->get_baked_length();if (path_length == 0) {return;}if (rotates) {Transform2D xform = c->sample_baked_with_rotation(progress, cubic);xform.translate_local(v_offset, h_offset);set_rotation(xform[1].angle());set_position(xform[2]);} else {Vector2 pos = c->sample_baked(progress, cubic);pos.x += h_offset;pos.y += v_offset;set_position(pos);}
}从PathFollow2D代码来看,它派生于Node2D,所以具备transform属性:Position、Rotation、Scale、Skew,对于路径上的点使用而言,这些信息就足够了,能够确定这些点的位置、方向,其实就是一个矢量
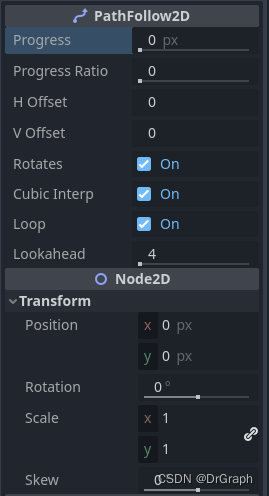
Loop属性值的含义前面已明确,Rotates、Cubic、H Offsets、V Offsets都是在_update_transform中起作用,具体算法可以不深究。但lookahead没找到具体用处,感觉影响不大。
class PathFollow2D : public Node2D {GDCLASS(PathFollow2D, Node2D);public:
private:Path2D *path = nullptr;real_t progress = 0.0;Timer *update_timer = nullptr;real_t h_offset = 0.0;real_t v_offset = 0.0;real_t lookahead = 4.0;bool cubic = true;bool loop = true;bool rotates = true;void _update_transform();protected:void _validate_property(PropertyInfo &p_property) const;void _notification(int p_what);static void _bind_methods();public:void path_changed();void set_progress(real_t p_progress);real_t get_progress() const;void set_h_offset(real_t p_h_offset);real_t get_h_offset() const;void set_v_offset(real_t p_v_offset);real_t get_v_offset() const;void set_progress_ratio(real_t p_ratio);real_t get_progress_ratio() const;void set_lookahead(real_t p_lookahead);real_t get_lookahead() const;void set_loop(bool p_loop);bool has_loop() const;void set_rotates(bool p_rotates);bool is_rotating() const;void set_cubic_interpolation(bool p_enable);bool get_cubic_interpolation() const;PackedStringArray get_configuration_warnings() const override;PathFollow2D() {}
};void PathFollow2D::path_changed() {if (update_timer && !update_timer->is_stopped()) {update_timer->start();} else {_update_transform();}
}void PathFollow2D::_update_transform() {if (!path) {return;}Ref<Curve2D> c = path->get_curve();if (!c.is_valid()) {return;}real_t path_length = c->get_baked_length();if (path_length == 0) {return;}if (rotates) {Transform2D xform = c->sample_baked_with_rotation(progress, cubic);xform.translate_local(v_offset, h_offset);set_rotation(xform[1].angle());set_position(xform[2]);} else {Vector2 pos = c->sample_baked(progress, cubic);pos.x += h_offset;pos.y += v_offset;set_position(pos);}
}void PathFollow2D::_notification(int p_what) {switch (p_what) {case NOTIFICATION_READY: {if (Engine::get_singleton()->is_editor_hint()) {update_timer = memnew(Timer);update_timer->set_wait_time(0.2);update_timer->set_one_shot(true);update_timer->connect("timeout", callable_mp(this, &PathFollow2D::_update_transform));add_child(update_timer, false, Node::INTERNAL_MODE_BACK);}} break;case NOTIFICATION_ENTER_TREE: {path = Object::cast_to<Path2D>(get_parent());if (path) {_update_transform();}} break;case NOTIFICATION_EXIT_TREE: {path = nullptr;} break;}
}void PathFollow2D::set_cubic_interpolation(bool p_enable) {cubic = p_enable;
}bool PathFollow2D::get_cubic_interpolation() const {return cubic;
}void PathFollow2D::_validate_property(PropertyInfo &p_property) const {if (p_property.name == "offset") {real_t max = 10000.0;if (path && path->get_curve().is_valid()) {max = path->get_curve()->get_baked_length();}p_property.hint_string = "0," + rtos(max) + ",0.01,or_less,or_greater";}
}PackedStringArray PathFollow2D::get_configuration_warnings() const {PackedStringArray warnings = Node::get_configuration_warnings();if (is_visible_in_tree() && is_inside_tree()) {if (!Object::cast_to<Path2D>(get_parent())) {warnings.push_back(RTR("PathFollow2D only works when set as a child of a Path2D node."));}}return warnings;
}void PathFollow2D::_bind_methods() {ClassDB::bind_method(D_METHOD("set_progress", "progress"), &PathFollow2D::set_progress);ClassDB::bind_method(D_METHOD("get_progress"), &PathFollow2D::get_progress);ClassDB::bind_method(D_METHOD("set_h_offset", "h_offset"), &PathFollow2D::set_h_offset);ClassDB::bind_method(D_METHOD("get_h_offset"), &PathFollow2D::get_h_offset);ClassDB::bind_method(D_METHOD("set_v_offset", "v_offset"), &PathFollow2D::set_v_offset);ClassDB::bind_method(D_METHOD("get_v_offset"), &PathFollow2D::get_v_offset);ClassDB::bind_method(D_METHOD("set_progress_ratio", "ratio"), &PathFollow2D::set_progress_ratio);ClassDB::bind_method(D_METHOD("get_progress_ratio"), &PathFollow2D::get_progress_ratio);ClassDB::bind_method(D_METHOD("set_rotates", "enable"), &PathFollow2D::set_rotates);ClassDB::bind_method(D_METHOD("is_rotating"), &PathFollow2D::is_rotating);ClassDB::bind_method(D_METHOD("set_cubic_interpolation", "enable"), &PathFollow2D::set_cubic_interpolation);ClassDB::bind_method(D_METHOD("get_cubic_interpolation"), &PathFollow2D::get_cubic_interpolation);ClassDB::bind_method(D_METHOD("set_loop", "loop"), &PathFollow2D::set_loop);ClassDB::bind_method(D_METHOD("has_loop"), &PathFollow2D::has_loop);ClassDB::bind_method(D_METHOD("set_lookahead", "lookahead"), &PathFollow2D::set_lookahead);ClassDB::bind_method(D_METHOD("get_lookahead"), &PathFollow2D::get_lookahead);ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "progress", PROPERTY_HINT_RANGE, "0,10000,0.01,or_less,or_greater,suffix:px"), "set_progress", "get_progress");ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "progress_ratio", PROPERTY_HINT_RANGE, "0,1,0.0001,or_less,or_greater", PROPERTY_USAGE_EDITOR), "set_progress_ratio", "get_progress_ratio");ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "h_offset"), "set_h_offset", "get_h_offset");ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "v_offset"), "set_v_offset", "get_v_offset");ADD_PROPERTY(PropertyInfo(Variant::BOOL, "rotates"), "set_rotates", "is_rotating");ADD_PROPERTY(PropertyInfo(Variant::BOOL, "cubic_interp"), "set_cubic_interpolation", "get_cubic_interpolation");ADD_PROPERTY(PropertyInfo(Variant::BOOL, "loop"), "set_loop", "has_loop");ADD_PROPERTY(PropertyInfo(Variant::FLOAT, "lookahead", PROPERTY_HINT_RANGE, "0.001,1024.0,0.001"), "set_lookahead", "get_lookahead");
}void PathFollow2D::set_progress(real_t p_progress) {ERR_FAIL_COND(!isfinite(p_progress));progress = p_progress;if (path) {if (path->get_curve().is_valid()) {real_t path_length = path->get_curve()->get_baked_length();if (loop && path_length) {progress = Math::fposmod(progress, path_length);if (!Math::is_zero_approx(p_progress) && Math::is_zero_approx(progress)) {progress = path_length;}} else {progress = CLAMP(progress, 0, path_length);}}_update_transform();}
}void PathFollow2D::set_h_offset(real_t p_h_offset) {h_offset = p_h_offset;if (path) {_update_transform();}
}real_t PathFollow2D::get_h_offset() const {return h_offset;
}void PathFollow2D::set_v_offset(real_t p_v_offset) {v_offset = p_v_offset;if (path) {_update_transform();}
}real_t PathFollow2D::get_v_offset() const {return v_offset;
}real_t PathFollow2D::get_progress() const {return progress;
}void PathFollow2D::set_progress_ratio(real_t p_ratio) {if (path && path->get_curve().is_valid() && path->get_curve()->get_baked_length()) {set_progress(p_ratio * path->get_curve()->get_baked_length());}
}real_t PathFollow2D::get_progress_ratio() const {if (path && path->get_curve().is_valid() && path->get_curve()->get_baked_length()) {return get_progress() / path->get_curve()->get_baked_length();} else {return 0;}
}void PathFollow2D::set_lookahead(real_t p_lookahead) {lookahead = p_lookahead;
}real_t PathFollow2D::get_lookahead() const {return lookahead;
}void PathFollow2D::set_rotates(bool p_rotates) {rotates = p_rotates;_update_transform();
}bool PathFollow2D::is_rotating() const {return rotates;
}void PathFollow2D::set_loop(bool p_loop) {loop = p_loop;
}bool PathFollow2D::has_loop() const {return loop;
}
从代码与用途来看,Path2D就没啥看头了,就负责提供一条曲线路径
class Path2D : public Node2D {GDCLASS(Path2D, Node2D);Ref<Curve2D> curve;void _curve_changed();protected:void _notification(int p_what);static void _bind_methods();public:
#ifdef TOOLS_ENABLEDvirtual Rect2 _edit_get_rect() const override;virtual bool _edit_use_rect() const override;virtual bool _edit_is_selected_on_click(const Point2 &p_point, double p_tolerance) const override;
#endifvoid set_curve(const Ref<Curve2D> &p_curve);Ref<Curve2D> get_curve() const;Path2D() {}
};#ifdef TOOLS_ENABLED
Rect2 Path2D::_edit_get_rect() const {if (!curve.is_valid() || curve->get_point_count() == 0) {return Rect2(0, 0, 0, 0);}Rect2 aabb = Rect2(curve->get_point_position(0), Vector2(0, 0));for (int i = 0; i < curve->get_point_count(); i++) {for (int j = 0; j <= 8; j++) {real_t frac = j / 8.0;Vector2 p = curve->sample(i, frac);aabb.expand_to(p);}}return aabb;
}bool Path2D::_edit_use_rect() const {return curve.is_valid() && curve->get_point_count() != 0;
}bool Path2D::_edit_is_selected_on_click(const Point2 &p_point, double p_tolerance) const {if (curve.is_null()) {return false;}for (int i = 0; i < curve->get_point_count(); i++) {Vector2 s[2];s[0] = curve->get_point_position(i);for (int j = 1; j <= 8; j++) {real_t frac = j / 8.0;s[1] = curve->sample(i, frac);Vector2 p = Geometry2D::get_closest_point_to_segment(p_point, s);if (p.distance_to(p_point) <= p_tolerance) {return true;}s[0] = s[1];}}return false;
}
#endifvoid Path2D::_notification(int p_what) {switch (p_what) {// Draw the curve if path debugging is enabled.case NOTIFICATION_DRAW: {if (!curve.is_valid()) {break;}if (!Engine::get_singleton()->is_editor_hint() && !get_tree()->is_debugging_paths_hint()) {return;}if (curve->get_point_count() < 2) {return;}#ifdef TOOLS_ENABLEDconst real_t line_width = get_tree()->get_debug_paths_width() * EDSCALE;
#elseconst real_t line_width = get_tree()->get_debug_paths_width();
#endifreal_t interval = 10;const real_t length = curve->get_baked_length();if (length > CMP_EPSILON) {const int sample_count = int(length / interval) + 2;interval = length / (sample_count - 1); // Recalculate real interval length.Vector<Transform2D> frames;frames.resize(sample_count);{Transform2D *w = frames.ptrw();for (int i = 0; i < sample_count; i++) {w[i] = curve->sample_baked_with_rotation(i * interval, false);}}const Transform2D *r = frames.ptr();// Draw curve segments{PackedVector2Array v2p;v2p.resize(sample_count);Vector2 *w = v2p.ptrw();for (int i = 0; i < sample_count; i++) {w[i] = r[i].get_origin();}draw_polyline(v2p, get_tree()->get_debug_paths_color(), line_width, false);}// Draw fish bones{PackedVector2Array v2p;v2p.resize(3);Vector2 *w = v2p.ptrw();for (int i = 0; i < sample_count; i++) {const Vector2 p = r[i].get_origin();const Vector2 side = r[i].columns[0];const Vector2 forward = r[i].columns[1];// Fish Bone.w[0] = p + (side - forward) * 5;w[1] = p;w[2] = p + (-side - forward) * 5;draw_polyline(v2p, get_tree()->get_debug_paths_color(), line_width * 0.5, false);}}}} break;}
}void Path2D::_curve_changed() {if (!is_inside_tree()) {return;}if (!Engine::get_singleton()->is_editor_hint() && !get_tree()->is_debugging_paths_hint()) {return;}queue_redraw();for (int i = 0; i < get_child_count(); i++) {PathFollow2D *follow = Object::cast_to<PathFollow2D>(get_child(i));if (follow) {follow->path_changed();}}
}void Path2D::set_curve(const Ref<Curve2D> &p_curve) {if (curve.is_valid()) {curve->disconnect("changed", callable_mp(this, &Path2D::_curve_changed));}curve = p_curve;if (curve.is_valid()) {curve->connect("changed", callable_mp(this, &Path2D::_curve_changed));}_curve_changed();
}Ref<Curve2D> Path2D::get_curve() const {return curve;
}void Path2D::_bind_methods() {ClassDB::bind_method(D_METHOD("set_curve", "curve"), &Path2D::set_curve);ClassDB::bind_method(D_METHOD("get_curve"), &Path2D::get_curve);ADD_PROPERTY(PropertyInfo(Variant::OBJECT, "curve", PROPERTY_HINT_RESOURCE_TYPE, "Curve2D", PROPERTY_USAGE_DEFAULT | PROPERTY_USAGE_EDITOR_INSTANTIATE_OBJECT), "set_curve", "get_curve");
}
当然,也不是啥用处没有,比如动态指定路径的时候,就可以设置一条Curve2D,然后赋给Path2D,后面就照此行事。
比如,该演示项目中,
var curve = Curve2D.new()
curve.add_point(Vector2i(100, 100))
curve.add_point(Vector2i(400, 600))
$MobPath.curve = curve然后,玩家呆在右上角,这就是那些MOB的死角,玩家可以活到把用户送走

相关文章:
Godot 4 源码分析 - Path2D与PathFollow2D
学习演示项目dodge_the_creeps,发现里面多了一个Path2D与PathFollow2D 研究GDScript代码发现,它主要用于随机生成Mob var mob_spawn_location get_node(^"MobPath/MobSpawnLocation")mob_spawn_location.progress randi()# Set the mobs dir…...
ardupilot 中坐标变换矩阵和坐标系变换矩阵区别
目录 文章目录 目录摘要1.坐标变换矩阵与坐标系变换矩阵摘要 本节主要记录ardupilot 中坐标变换矩阵和坐标系变换矩阵的区别,这里非常重要,特别是进行姿态误差计算时,如果理解错误,很难搞明白后面算法。 1.坐标变换矩阵与坐标系变换矩阵 坐标变换矩阵的本质含义:是可以把…...
VR内容研发公司 | VR流感病毒实验虚拟现实课件
由广州华锐互动开发的《VR流感病毒实验虚拟现实课件》是一种新型的教学模式,可以为学生提供更加真实和直观的流感病毒分离鉴定实验操作体验,从而提高学生的实验技能和工作效率。 《VR流感病毒实验虚拟现实课件》涉及了生物安全二级实验室(BSL-2)和流感病…...
python——案例10:认识if、elif、else
案例10:认识if、elif、elsenumfloat(input("输入数值:")) #用户输入数字if num>0:print("正数")elif num0:print("零") else:print("负数")#输出结果如下:输入数值:-1 负数 输入数值…...

Hadoop中命令检查hdfs的文件是否存在
Hadoop中命令检查hdfs的文件是否存在 在Hadoop中,可以使用以下命令检查HDFS文件是否存在: hadoop fs -test -e 其中,是要检查的HDFS文件的路径。 如果文件存在,命令返回0;如果文件不存在,命令返回非0值…...

计算机网络用户接入层设计
用户接入层为用户提供访问核心网络的能力, 为用户提供共享/交换的带宽分配,按照业主要求,并考虑到端口密度的要求以及 设备的性能价格比,建议选用 Catalyst 3524XL和 Catalyst 3548XL 工作组交换 机,分别放置于配线间中。如同一配线间需两台以…...

全志F1C200S嵌入式驱动开发(应用程序开发)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 我们在开发soc驱动的时候,很多情况下也要验证下当前的驱动功能是否正确。当然除了验证驱动功能之外,我们还要编写业务代码和流程代码。这中间就和各行各业有关了,有的是算法,有…...

人工智能学习07--pytorch23--目标检测:Deformable-DETR训练自己的数据集
参考 https://blog.csdn.net/qq_44808827/article/details/125326909https://blog.csdn.net/dystsp/article/details/125949720?utm_mediumdistribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-0-125949720-blog-125326909.235^v38^pc_releva…...
Statefulset 实战 1
上一部分与大家分享到 Statefulset 与 RplicaSet 的区别,以及 Statefulset 的特点,能做的一些事情及一些注意事项 现在我们来尝试使用 Statefulset 来部署我们的应用,我们可以需要有应用程序,然后有持久化卷 开始使用 Statefuls…...

没有jodatime,rust怎么方便高效的操作时间呢?
关注我,学习Rust不迷路!! 当使用Rust进行日期操作时,可以使用 chrono 库。下面给出了二十个常见的日期操作的例子: 1. 获取当前日期和时间: use chrono::prelude::*;let current_datetime Local::now()…...
如何把pdf转成cad版本?这种转换方法非常简单
将PDF转换成CAD格式的优势在于,CAD格式通常是用于工程设计和绘图的标准格式。这种格式的文件可以在计算机上进行编辑和修改,而不需要纸质副本。此外,CAD文件通常可以与其他CAD软件进行交互,从而使得工程设计和绘图过程更加高效和精…...

MySQL常用函数方法
字符串函数 函数描述举例left(str, length)从左开始截取字符串,截取length个left(2023-08-04, 7) 2023-08right(str, length)从右开始截取字符串,截取length个 right(2023-08-04, 5) 08-04 substring(str, pos, length) substring(被截取字…...
Linux命令200例专栏导读:实用指南助你成为Linux大师
🏆作者简介,黑夜开发者,全栈领域新星创作者✌,阿里云社区专家博主,2023年6月csdn上海赛道top4。 🏆数年电商行业从业经验,历任核心研发工程师,项目技术负责人。 🏆本文已…...

ICN6202 MIPIDSI转LVDS桥接芯片的功能及特征 调试文档资料
产品特征功能: 输入:MIPI DSI 支持MIPI D-PHY Version 1.00.00 和 MIPI DSI Version 1.02.00. 可接收MIPI DSI 18bpp RGB666 and 24bpp RGB888 packets 4 lane data1 lane clock 4对数据线可以选择1、2、3、4lane data 每对差分数据传输线最大可…...

vscode 格式问题
1、EditorConfig for VS Code 插件 shift alt f 格式化文件(VS Code格式化按键),如下图,每个缩进4空格 代码如下 创建文件名 .editorconfig root true [*] charset utf-8 indent_style space indent_size 2 end_of_…...
二值化灰度函数+调用摄像头+鼠标响应+肤色检测)
OPENCV C++(三)二值化灰度函数+调用摄像头+鼠标响应+肤色检测
RGB转灰度函数 cvtColor(image, gray, COLOR_BGR2GRAY); 图像 目标图像 rgb转灰度 大津法二值化函数 threshold(gray, result1, 84, 255, THRESH_OTSU); 灰度图,目标图,阈值,大于阈值的转换的像素值,方法为大津法 自适应二值…...
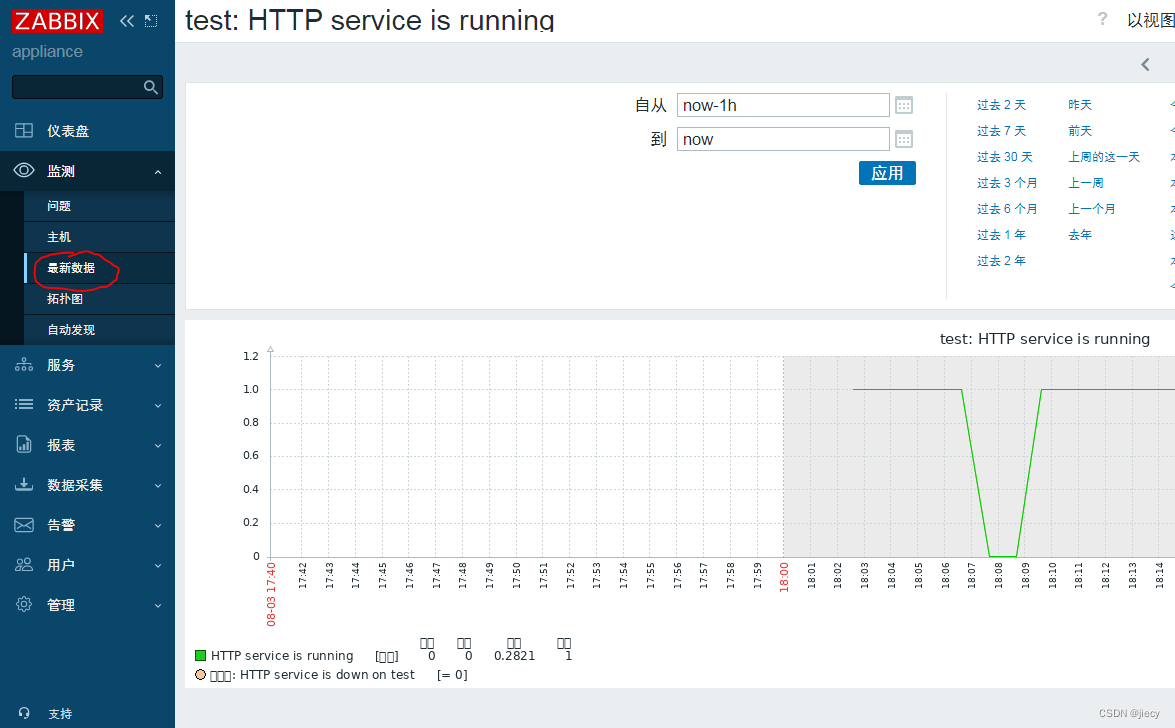
zabbix简易入门:基本的网络监控、WEB监控
需求背景: 我们越来越发现:网络越来越复杂,网络、应用、云端……故障点随时可能发生,而我们不能人工盯着所有的问题,所以,网管软件是必须的。那么没有预算的情况下,我们只好自己布署简单的…...
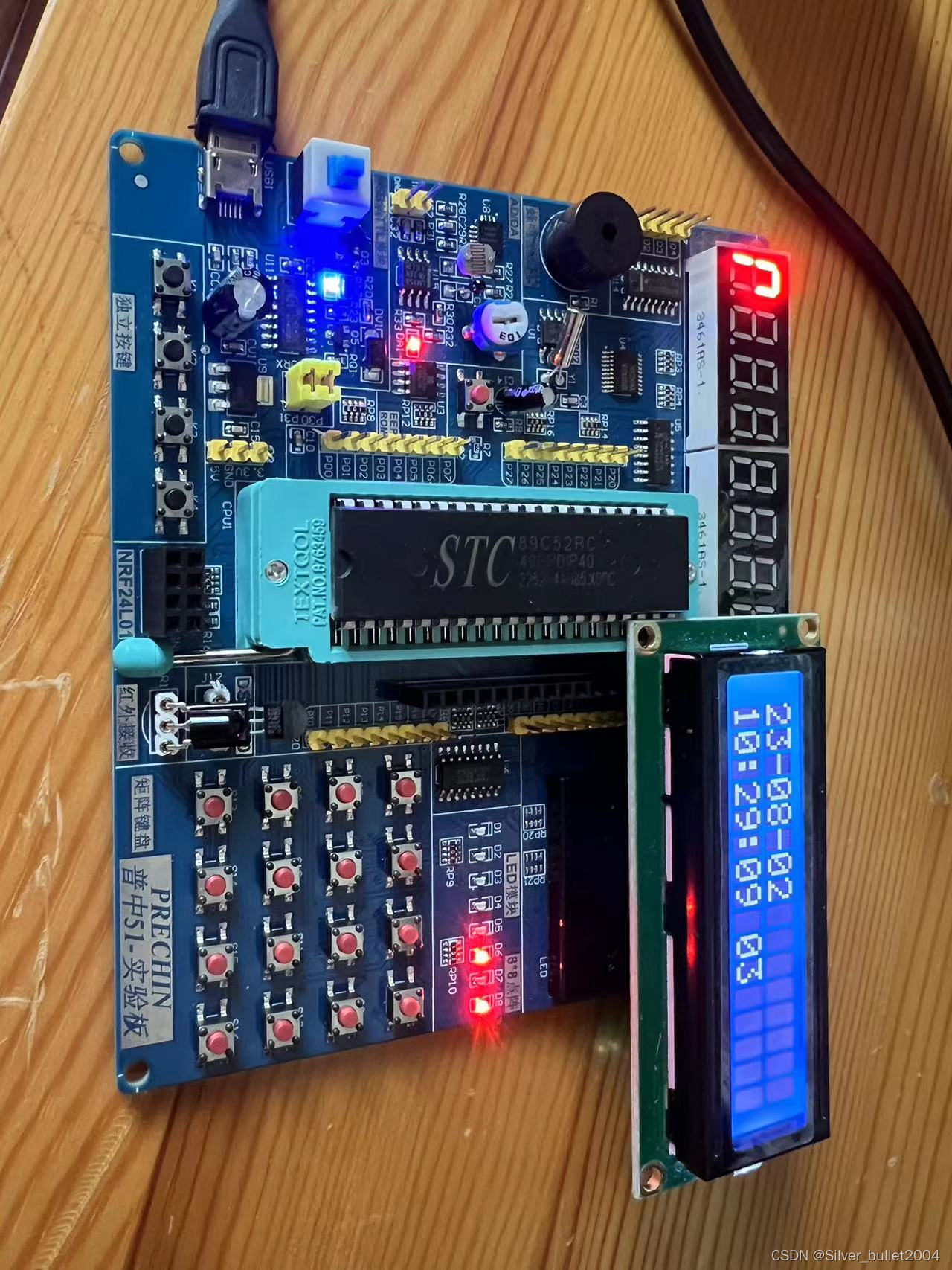
51单片机学习--DS1302可调时钟
之前学习过用定时器做的时钟,但是那样不仅误差大还费CPU,接下来利用DS1302时钟模块做一个可调实时时钟 这一次直接编写DS1302模块,首先要在DS1392.c 中根据下面的模块原理图进行位声明: sbit DS1302_SCLK P3^6; sbit DS1302_IO …...
)
Matlab统计字符串中共有多少种字符以及每种字符出现次数的功能实现(Matlab R2021a)
在做2023年深圳杯B题的时候,需要使用隐写技术(将特定信息嵌入信息载体且不易被察觉,可被广泛地应用于著作权保护、数据附加等领域)将《中华人民共和国著作权法》全篇10314个字符写入图片,首先我想到的是利用霍夫曼编码…...

HTTPS文件传输
目录 0.https概述1.单钥匙锁2.双钥匙锁 - 防篡改3.双钥匙锁 - 防泄漏4.单双钥匙锁相互配合 0.https概述 HTTPS其实就是HTTP协议加上TLS/SSL,SSL是个加密套件,负责对HTTP的数据进行加密,TLS是SSL的升级版,现在提到HTTPS࿰…...
)
OpenSSH安全升级指南:如何快速禁用CBC模式并切换到CTR加密(附最新配置命令)
OpenSSH安全加固实战:从漏洞检测到加密算法升级全流程 最近在给某金融客户做安全审计时,发现他们的生产服务器还在使用OpenSSH的CBC模式加密。这让我想起十年前那个著名的CVE-2008-5161漏洞——攻击者可以利用CBC模式的弱点,从SSH会话中恢复出…...

Dockerfile从零入门:手把手教你打包Node.js应用,解决镜像构建的常见坑
代码写完了,在本地跑得好好的,怎么把它打包成Docker镜像,部署到服务器上?答案就是Dockerfile。今天这篇文章,我们用Node.js应用做例子,从零开始写一个Dockerfile,把应用打包成镜像,顺…...
布局处理总结(AI版))
iOS / SwiftUI 输入法(键盘)布局处理总结(AI版)
文章目录📘 iOS / SwiftUI 输入法(键盘)处理总结一、问题背景二、输入框切换闪烁问题❌ 错误原因解决办法键盘动画(类似 Android Insets)uikitswiftUI📘 iOS / SwiftUI 输入法(键盘)…...

免费方法和付费工具处理顽固AI率,差距有多大
顽固AI率,有没有必要付费? 这个问题的答案,取决于你有多少时间,以及你能接受多少不确定性。这篇文章用数据说话。 免费方法:自己改写 方法:自己逐段阅读,换词改句,加口语化表达 …...
)
Python unittest 断言(断言方法大全)
unittest 是 Python 内置的单元测试框架,断言(Assert) 是核心功能,用来判断「测试结果是否符合预期」。如果断言失败,测试用例会直接报错;断言通过,测试用例正常通过。 一、最常用的断言方法(必背) 日常写单元测试,90% 场景只用这 6 个: 表格 断言方法 作用 self.…...

产品经理开需求评审会议2026年这5款会议语音转文字工具 帮你节省90会议纪要整理时间
做了5年产品经理,谁懂啊,每周三四场需求评审会,自己记笔记跟不上,转头leader就让你出整理好的带待办的纪要,漏一个需求点就要背锅;之前录了音自己逐字转,1小时的会我要整理2小时,经常…...

3大挑战与解决方案:如何构建现代化医院信息系统的分布式架构与数据治理平台
3大挑战与解决方案:如何构建现代化医院信息系统的分布式架构与数据治理平台 【免费下载链接】HIS HIS英文全称 hospital information system(医疗信息就诊系统),系统主要功能按照数据流量、流向及处理过程分为临床诊疗、药品管理、…...

2026届毕业生推荐的五大降重复率方案推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 为能切实且有效地把文本里AIGC的比例给降下来,特地给出建议采用多维度的策略&am…...

RMSNorm:深度学习归一化技术的革新与实践
1. 从LayerNorm到RMSNorm:归一化技术的进化之路 第一次在Transformer模型里看到RMSNorm这个名词时,我正对着训练日志里暴涨的GPU内存使用率发愁。作为LayerNorm的"轻量版"替代品,RMSNorm用一行数学公式就解决了困扰我多时的显存问题…...

用快马AI十分钟搭建班级宠物园应用下载页,快速验证教育产品原型
最近在帮小学老师朋友设计一个班级宠物园应用,想快速验证这个教育产品的可行性。传统开发流程太耗时,于是尝试用InsCode(快马)平台的AI生成功能,十分钟就搭出了可交互的下载页原型。分享下具体实现思路: 需求拆解与框架搭建 先明确…...