单片机中断系统
单片机中断系统
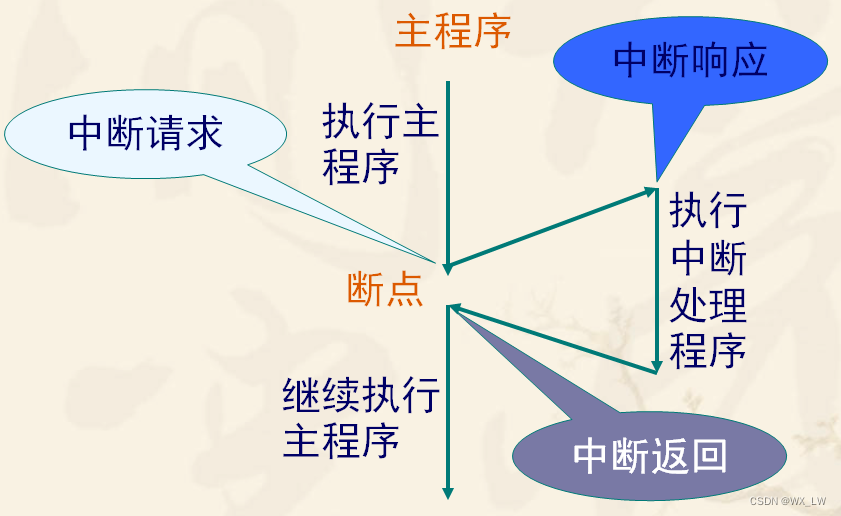
中断的概念:
CPU在处理某一事件A时,发生了另一事件B请求CPU迅速去处理(中断发生);CPU暂时中断当前的工作,转去处理事件B(中断响应和中断服务);待CPU将事件B处理完毕后,再回到原来事件A被中断的地方继续处理事件A(中断返回),这一过程称为中断 。
随着计算机技术的应用,人们发现中断技术不仅解决了快速主机与慢速I/O设备的数据传送问题,而且还具有如下优点:
分时操作。 CPU可以分时为多个I/O设备服务,提高了计算机的利用率;
实时响应。 CPU能够及时处理应用系统的随机事件,系统的实时性大大增强;
可靠性高。 CPU具有处理设备故障及掉电等突发性事件能力,从而使系统可靠性提高。
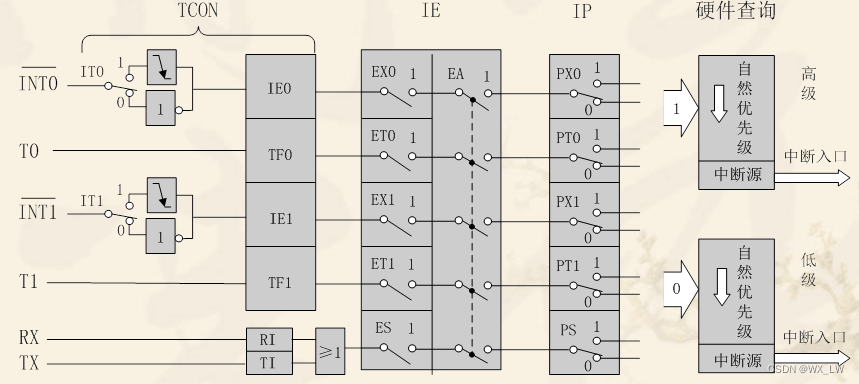
1、(P3.2)可由IT0(TCON.0)选择其为低电平有效还是下降沿有效。当CPU检测到P3.2引脚上出现有效的中断信号时,中断标志IE0(TCON.1)置1,向CPU申请中断。
2、(P3.3)可由IT1(TCON.2)选择其为低电平有效还是下降沿有效。当CPU检测到P3.3引脚上出现有效的中断信号时,中断标志IE1(TCON.3)置1,向CPU申请中断。
3、TF0(TCON.5),片内定时/计数器T0溢出中断请求标志。当定时/计数器T0发生溢出时,置位TF0,并向CPU申请中断。
4、TF1(TCON.7),片内定时/计数器T1溢出中断请求标志。当定时/计数器T1发生溢出时,置位TF1,并向CPU申请中断。
5、RI(SCON.0)或TI(SCON.1),串行口中断请求标志。当串行口接收完一帧串行数据时置位RI或当串行口发送完一帧串行数据时置位TI,向CPU申请中断。
中断允许控制

EX0(IE.0),外部中断0允许位;
ET0(IE.1),定时/计数器T0中断允许位;
EX1(IE.2),外部中断0允许位;
ET1(IE.3),定时/计数器T1中断允许位;
ES(IE.4),串行口中断允许位;
EA (IE.7), CPU中断允许(总允许)位。
中断请求标志

IT0(TCON.0),外部中断0触发方式控制位。
当IT0=0时,为电平触发方式。
当IT0=1时,为边沿触发方式(下降沿有效)。
IE0(TCON.1),外部中断0中断请求标志位。
IT1(TCON.2),外部中断1触发方式控制位。
IE1(TCON.3),外部中断1中断请求标志位。
TF0(TCON.5),定时/计数器T0溢出中断请求标志位。
TF1(TCON.7),定时/计数器T1溢出中断请求标志位。
中断优先级
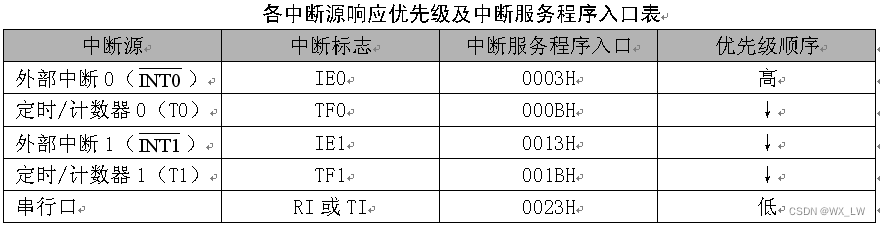
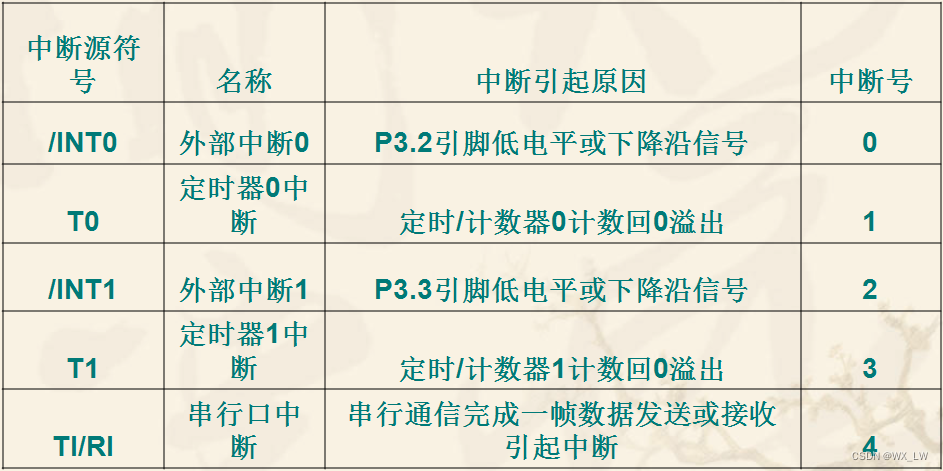
中断源
定时/计数器

51单片机定时/计数器的工作由两个特殊功能寄存器控制。TMOD用于设置其工作方式;TCON用于控制其启动和中断申请。
工作方式寄存器TMOD
工作方式寄存器TMOD用于设置定时/计数器的工作方式,低四位用于T0,高四位用于T1。其格式如下:
GATE是门控位, GATE=0时,用于控制定时器的启动是否受外部中断源信号的影响。只要用软件使TCON中的TR0或TR1为1,就可以启动定时/计数器工作;GATA=1时,要用软件使TR0或TR1为1,同时外部中断引脚INT0/1也为高电平时,才能启动定时/计数器工作。即此时定时器的启动条件,加上了INT0/1引脚为高电平这一条件。
C/T :定时/计数模式选择位。C/T =0为定时模式;C/T =1为计数模式。
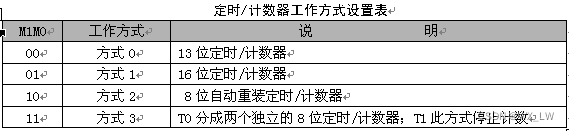
M1M0:工作方式设置位。定时/计数器有四种工作方式。
控制其启动和中断申请TCON
TCON的低4位用于控制外部中断,已在前面介绍。TCON的高4位用于控
制定时/计数器的启动和中断申请。其格式如下:
TF1(TCON.7):T1溢出中断请求标志位。T1计数溢出时由硬件自动置TF1为1。CPU响应中断后TF1由硬件自动清0。T1工作时,CPU可随时查询TF1的状态。所以,TF1可用作查询测试的标志。TF1也可以用软件置1或清0,同硬件置1或清0的效果一样。
TR1(TCON.6):T1运行控制位。TR1置1时,T1开始工作;TR1置0时,T1停止工作。TR1由软件置1或清0。所以,用软件可控制定时/计数器的启动与停止。
TF0(TCON.5):T0溢出中断请求标志位,其功能与TF1类同。
TR0(TCON.4):T0运行控制位,其功能与TR1类同。
TLx与THx之间的搭配关T0(TL0-0x8A,TH0-0x8C), T1(TL1-0x8B,TH1-0x8D)
1)、TLx与THx之间32进制。即当TLx计到32个脉冲时,TLx归0同时THx进1。这也称为方式0。
2)、TLx与THx之间256进制。即当TLx计到256个脉冲时,TLx归0同时THx进1。这也称为方式1。在方式1时,最多计65536个脉冲产生溢出。在主频为11.0592M时,每计一个脉冲为1.085us,所以溢出一次的时间为1.085usx65536=71.1ms。
3)、THx用于存放TLx溢出后,TLx下次计数的起点。这也称为方式2。
4)、THx与TLx分别独立对自己的输入脉冲计数。这也称为方式3。
5、定时器初始化
1)、确定定时器的计数模式。
2)、确定TLx与THx之间的搭配关系。
3)、确定计数起点值。即TLx与THx的初值。
STC单片机STC89C52RC定时器延时时间的计算
延时时间要根据晶振频率计算,不同板子可能有所不同。
时钟周期:
1/时钟源,在我现在这块板子上,晶振频率是11.0592M,也就是时钟周期是 1/11059200秒
机器周期:
一般51单片机是12个时钟周期,我的板子也就是 12/11059200秒
单次定时最长时间:
如果是16位的计数器,16位最大值是65535,共可计数65536次。基本的常数一定要记住,还要记住8位最大值是255,共可计数256次,还要记住8位上每位代表的数值。
12 * 65536/11059200 = 0.0711 s,也就是,71 ms内的定时可以单次定时就完成。如果定时时间超过71 ms,就要循环了。
一次定时需要几次机器周期:
计算公式:定时秒数/机器周期
比如我要定时1秒, 1/(12/11059200)= 921600次,16位计数器最大可计数65536次,921600次早就益出了。我们可以每次定时10 ms,循环100次就可以定时1秒了,1 s缩小100百倍就是10 ms, 也就是每次需要计数9216次。
确实计数器初始值:
定时10 ms时,如果计数器从0开始计数,我们就不知道什么时候到了9216次。所以应该计数了9216次,16位计数器最多计数95536次,然后就溢出,一溢出TCON的TF位就会置1,我们只要经常检测TF位就可以知道什么时候完成10ms的定时了。
计算公式:计数器初始值=最大计数次数 - 需要计数次数
如果定时10 ms,计数器的初始值就是 65536 - 9216
计算计数器的高位和低位:
16位的计数器,也就是两个8位组成,8位的最大计数次数是256。所以:
计数器高位 = 初始值/256
计数器低位 = 初始值%256
例如:
设置 外部中断0
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit k3=P3^2; //定义按键K3
sbit led=P2^0; //定义P20口是led
void delay(u16 i)
{
while(i--);
}
void Int0Init()
{
//设置INT0
IT0=1;//跳变沿出发方式(下降沿)
EX0=1;//打开INT0的中断允许。
EA=1;//打开总中断
}
void main()
{
Int0Init(); // 设置外部中断0
while(1);
}
void Int0() interrupt 0 //外部中断0的中断函数
{
delay(1000); //延时消抖
if(k3==0)
{
led=~led;
}
}
例如:
设置 定时器0
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit led=P2^0; //定义P20口是led
void Timer0Init()
{
TMOD|=0X01;//选择为定时器0模式,工作方式1,仅用TR0打开启动。
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
ET0=1;//打开定时器0中断允许
EA=1;//打开总中断
TR0=1;//打开定时器
}
void main()
{
Timer0Init(); //定时器0初始化
while(1);
}
void Timer0() interrupt 1
{
static u16 i;
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
i++;
if(i==1000)
{
i=0;
led=~led;
}
}
例如
交通灯
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
//--定义使用的IO口--//
#define GPIO_DIG P0
#define GPIO_TRAFFIC P1
sbit RED10 = P1^0; //上人行道红灯
sbit GREEN10 = P1^1; //上人行道绿灯
sbit RED11 = P1^2;
sbit YELLOW11= P1^3;
sbit GREEN11 = P1^4;
sbit RED00 = P3^0; //右人行道红灯
sbit GREEN00 = P3^1; //右人行道绿灯
sbit RED01 = P1^5;
sbit YELLOW01= P1^6;
sbit GREEN01 = P1^7;
u8 code smgduan[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//显示0~F的值
u8 DisplayData[8];
u8 Second;
void delay(u16 i)
{
while(i--);
}
void DigDisplay()
{
u8 i;
for(i=0;i<8;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; break;//显示第2位
case(3):
LSA=1;LSB=1;LSC=0; break;//显示第3位
case(4):
LSA=0;LSB=0;LSC=1; break;//显示第4位
case(5):
LSA=1;LSB=0;LSC=1; break;//显示第5位
case(6):
LSA=0;LSB=1;LSC=1; break;//显示第6位
case(7):
LSA=1;LSB=1;LSC=1; break;//显示第7位
}
GPIO_DIG=DisplayData[i];//发送段码
delay(100); //间隔一段时间扫描
GPIO_DIG=0x00;//消隐
}
}
void Timer0Init()
{
TMOD|=0X01;//选择为定时器0模式,工作方式1,仅用TR0打开启动。
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
ET0=1;//打开定时器0中断允许
EA=1;//打开总中断
TR0=1;//打开定时器
}
void main()
{
Second = 1;
Timer0Init();
while(1)
{
if(Second == 70)
{
Second = 1;
}
//--宝田路通行,30秒--//
if(Second < 31)
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(30 - Second) % 100 / 10];
DisplayData[3] = smgduan[(30 - Second) %10];
DisplayData[4] = 0x00;
DisplayData[5] = 0x00;
DisplayData[6] = DisplayData[2];
DisplayData[7] = DisplayData[3];
DigDisplay();
//--宝田路通行--//
GPIO_TRAFFIC = 0xFF; //将所有的灯熄灭
RED00 = 1;
GREEN00 = 1;
GREEN11 = 0; //宝田路绿灯亮
GREEN10 = 0; //宝田路人行道绿灯亮
RED01 = 0; //前进路红灯亮
RED00 = 0; //前进路人行道红灯亮
}
//--黄灯等待切换状态,5秒--//
else if(Second < 36)
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(35 - Second) % 100 / 10];
DisplayData[3] = smgduan[(35 - Second) %10];
DisplayData[4] = 0x00;
DisplayData[5] = 0x00;
DisplayData[6] = DisplayData[2];
DisplayData[7] = DisplayData[3];
DigDisplay();
//--黄灯阶段--//
GPIO_TRAFFIC = 0xFF; //将所有的灯熄灭
RED00 = 1;
GREEN00 = 1;
YELLOW11 = 0; //宝田路黄灯亮
RED10 = 0; //宝田路人行道红灯亮
YELLOW01 = 0; //前进路红灯亮
RED00 = 0; //前进路人行道红灯亮
}
//--前进路通行--//
else if(Second < 66)
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(65 - Second) % 100 / 10];
DisplayData[3] = smgduan[(65 - Second) %10];
DisplayData[4] = 0x00;
DisplayData[5] = 0x00;
DisplayData[6] = DisplayData[2];
DisplayData[7] = DisplayData[3];
DigDisplay();
//--黄灯阶段--//
GPIO_TRAFFIC = 0xFF; //将所有的灯熄灭
RED00 = 1;
GREEN00 = 1;
RED11 = 0; //宝田路红灯亮
RED10 = 0; //宝田路人行道红灯亮
GREEN01 = 0; //前进路绿灯亮
GREEN00 = 0; //前进路人行道绿灯亮
}
//--黄灯等待切换状态,5秒--//
else
{
DisplayData[0] = 0x00;
DisplayData[1] = 0x00;
DisplayData[2] = smgduan[(70 - Second) % 100 / 10];
DisplayData[3] = smgduan[(70 - Second) %10];
DisplayData[4] = 0x00;
DisplayData[5] = 0x00;
DisplayData[6] = DisplayData[2];
DisplayData[7] = DisplayData[3];
DigDisplay();
//--黄灯阶段--//
GPIO_TRAFFIC = 0xFF; //将所有的灯熄灭
RED00 = 1;
GREEN00 = 1;
YELLOW11 = 0; //宝田路黄灯亮
RED10 = 0; //宝田路人行道红灯亮
YELLOW01 = 0; //前进路红灯亮
RED00 = 0; //前进路人行道红灯亮
}
}
}
void Timer0() interrupt 1
{
static u16 i;
TH0=0XFC; //给定时器赋初值,定时1ms
TL0=0X18;
i++;
if(i==1000)
{
i=0;
Second ++;
}
}
例如
脉冲发生器
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
//--定义使用的IO--//
#define GPIO_DIG P0
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
u8 code smgduan[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//显示0~F的值
u8 DisplayData[8];
//--定义全局变量--//
unsigned long Freq; //用来存放要显示的频率值
unsigned long TimeCount; //用于计算1S钟的
void delay(u16 i)
{
while(i--);
}
void DigDisplay()
{
u8 i;
for(i=0;i<8;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; break;//显示第2位
case(3):
LSA=1;LSB=1;LSC=0; break;//显示第3位
case(4):
LSA=0;LSB=0;LSC=1; break;//显示第4位
case(5):
LSA=1;LSB=0;LSC=1; break;//显示第5位
case(6):
LSA=0;LSB=1;LSC=1; break;//显示第6位
case(7):
LSA=1;LSB=1;LSC=1; break;//显示第7位
}
GPIO_DIG=DisplayData[i];//发送段码
delay(10); //间隔一段时间扫描
GPIO_DIG=0x00;//消隐
}
}
void Timer_Config()
{
//--定时器T1做计数器,工作方式1(16位定时器),只由TRx打开计数器--//
//--定时器T0做定时器,工作方式1(16位定时器),只由TRx打开定时器--//
TMOD=0x51;
//--设置定时器晶振为12MHZ时定时50ms--//
TH0=0x3C;
TL0=0xB0;
//--打开中断-//
ET0=1;
ET1=1;
EA=1;
//--打开定时器*/
TR0=1;
TR1=1;
}
void main()
{
Timer_Config();
while(1)
{
if(TR1 == 0) //当计数器停下的时候,表明计数完毕
{
Freq = Freq + TL1; //读取TL的值
Freq = Freq + (TH1 * 256); //读取TH的值
//--求频率的个十百千万十万位--//
DisplayData[0] = smgduan[Freq%1000000/100000];
DisplayData[1] = smgduan[Freq%100000/10000];
DisplayData[2] = smgduan[Freq%10000/1000];
DisplayData[3] = smgduan[Freq%1000/100];
DisplayData[4] = smgduan[Freq%100/10];
DisplayData[5] = smgduan[Freq%10];
//--显示完,重新计算下一次频率。--//
Freq = 0;//将计算的频率清零
TH1 = 0; //将计数器的值清零
TL1 = 0;
TR0 = 1; //开启定时器
TR1 = 1; //开启计数器
}
//--显示求得的数值--//
DigDisplay();
}
}
void Timer0() interrupt 1
{
//--12MHZ设置定时50ms的初值--//
TH0=0x3C;
TL0=0xB0;
TimeCount++;
if(TimeCount==20)//计时到1S
{
TR0=0;
TR1=0;
TimeCount=0;
}
}
void Timer1() interrupt 3
{
//--进入一次中断,表明计数到了65536--//
Freq=Freq+65536;
}
例如
串口通讯
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
void UsartInit()
{
SCON=0X50; //设置为工作方式1
TMOD=0X20; //设置计数器工作方式2
PCON=0X80; //波特率加倍
TH1=0XF3; //计数器初始值设置,注意波特率是4800的
TL1=0XF3;
ES=1; //打开接收中断
EA=1; //打开总中断
TR1=1; //打开计数器
}
void main()
{
UsartInit(); // 串口初始化
while(1);
}
void Usart() interrupt 4
{
u8 receiveData;
receiveData=SBUF;//出去接收到的数据
RI = 0;//清除接收中断标志位
SBUF=receiveData;//将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
}
例如 485通讯
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit RS485DIR=P1^0; //RS485DIR=0为接收状态 RS485DIR=1为发送状态
void delay(u16 i)
{
while(i--);
}
void UsartInit()
{
SCON=0X50; //设置为工作方式1
TMOD=0X20; //设置计数器工作方式2
PCON=0X80; //波特率加倍
TH1=0XF3; //计数器初始值设置,注意波特率是4800的
TL1=0XF3;
ES=1; //打开接收中断
EA=1; //打开总中断
TR1=1; //打开计数器
RS485DIR=0;
}
void main()
{
UsartInit(); // 串口初始化
while(1);
}
void Usart() interrupt 4
{
u8 receiveData;
receiveData=SBUF;//出去接收到的数据
RI = 0;//清除接收中断标志位
delay(100);
RS485DIR=1;
SBUF=receiveData;//将接收到的数据放入到发送寄存器
while(!TI); //等待发送数据完成
TI=0; //清除发送完成标志位
RS485DIR=0;
}
相关文章:
单片机中断系统
单片机中断系统 中断的概念: CPU在处理某一事件A时,发生了另一事件B请求CPU迅速去处理(中断发生);CPU暂时中断当前的工作,转去处理事件B(中断响应和中断服务);待CPU将事…...
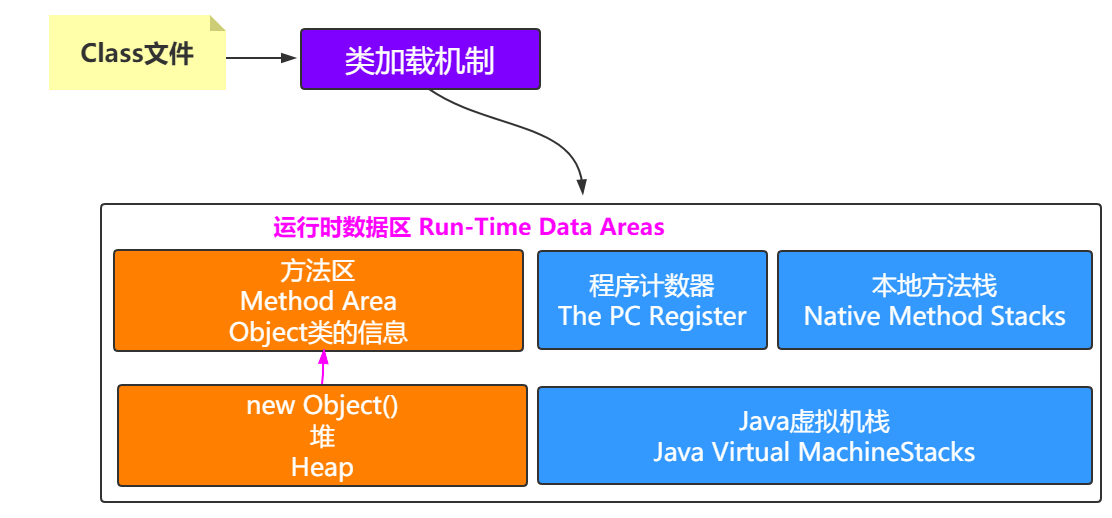
二、JVM-深入运行时数据区
深入运行时数据区 计算机体系结构 JVM的设计实际上遵循了遵循冯诺依曼计算机结构 CPU与内存交互图: 硬件一致性协议: MSI、MESI、MOSI、Synapse、Firely、DragonProtocol 摩尔定律 摩尔定律是由英特尔(Intel)创始人之一戈登摩尔(Gordon Moore)提出来…...

随机验证码vue实现,登录验证码随机验证码数字和字母类型的
1、组件 <!--loginCode登录验证码组件--> <template> <canvas id"canvasCode" :width"contentWidth" :height"contentHeight" /> </template> <script> export default { name: LoginCode, props: { identif…...
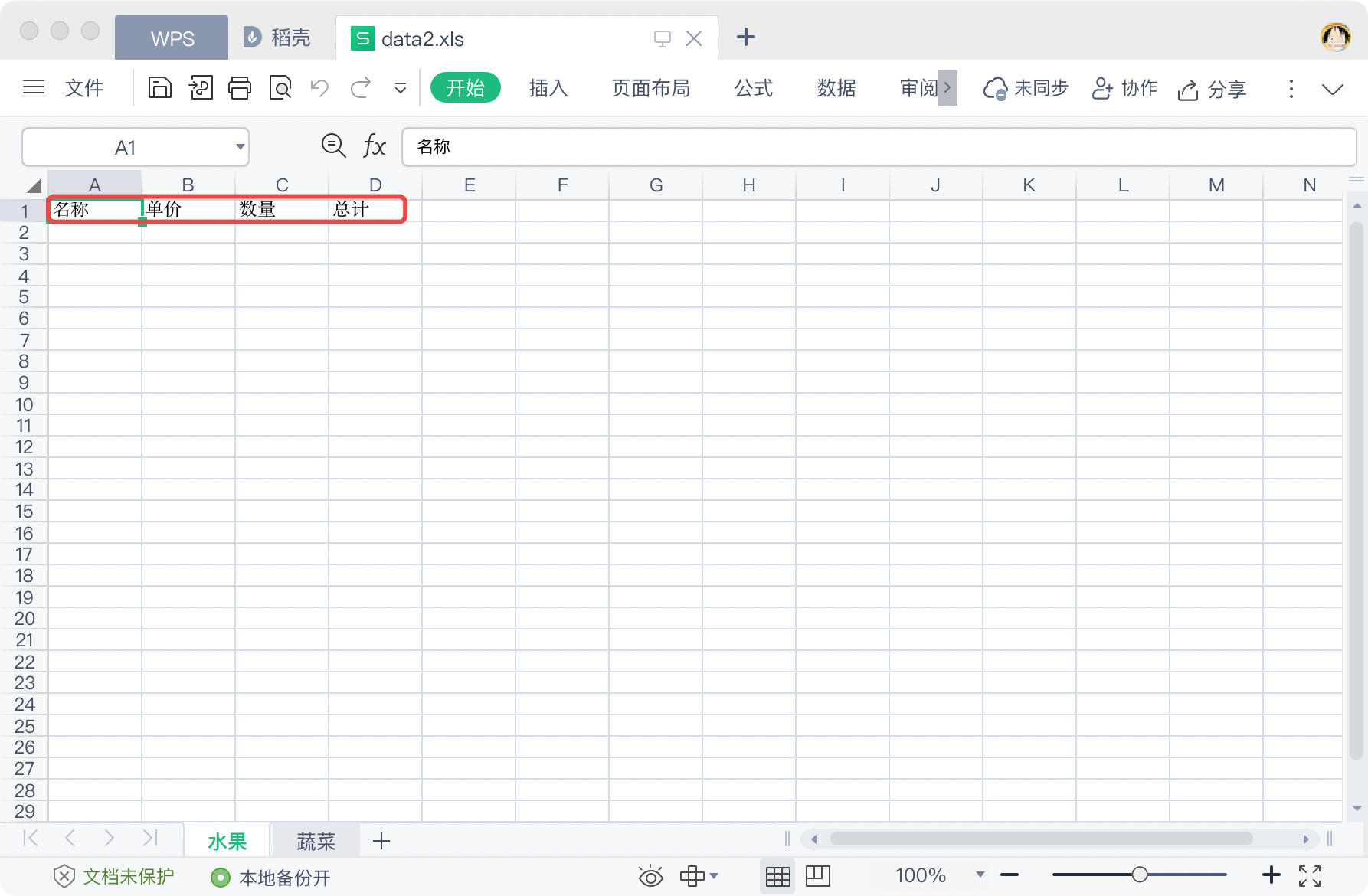
xlrd与xlwt操作Excel文件详解
Python操作Excel的模块有很多,并且各有优劣,不同模块支持的操作和文件类型也有不同。下面是各个模块的支持情况: .xls.xlsx获取文件内容写入数据修改文件内容保存样式调整插入图片xlrd√√√xlwt√√√√√xlutils√√√√xlwings√√√√√…...
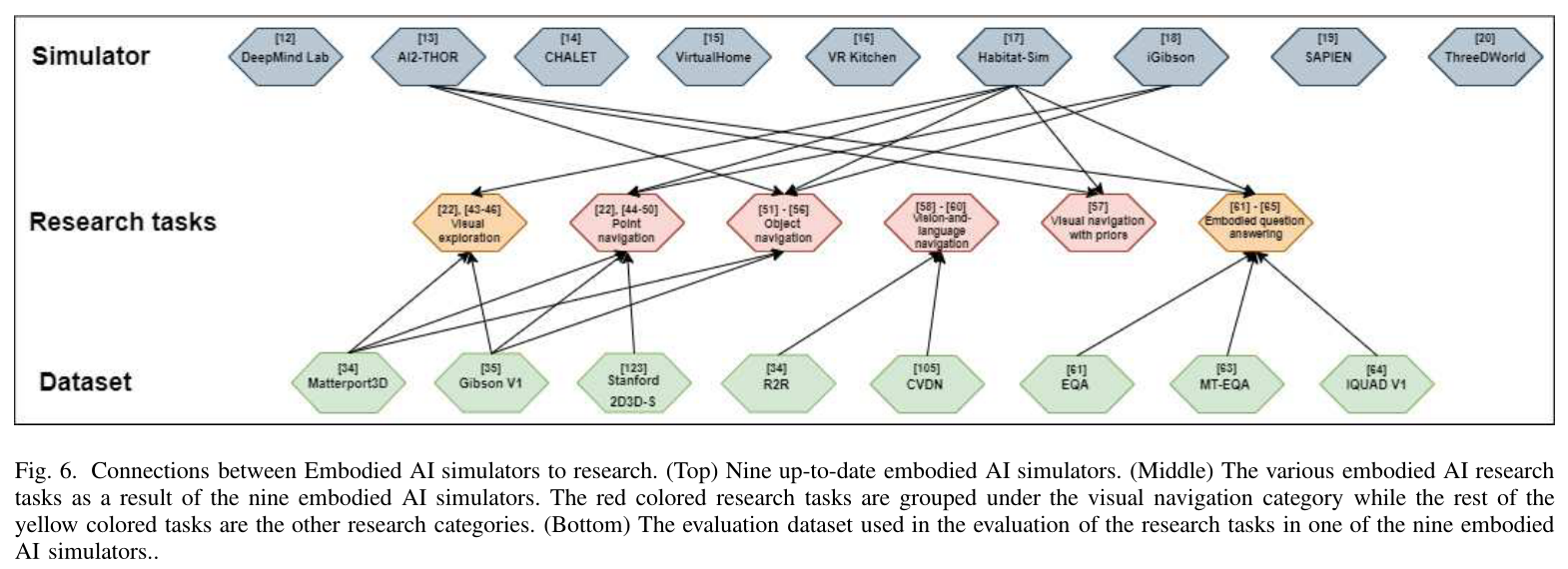
A Survey of Embodied AI: From Simulators to Research Tasks 论文阅读
论文信息: 题目:A Survey of Embodied AI: From Simulators to Research Tasks 作者:Jiafei Duan, Samson Yu 来源:arXiv 时间:2022 Abstract 通过评估当前的九个具体人工智能模拟器与我们提出的七个功能࿰…...
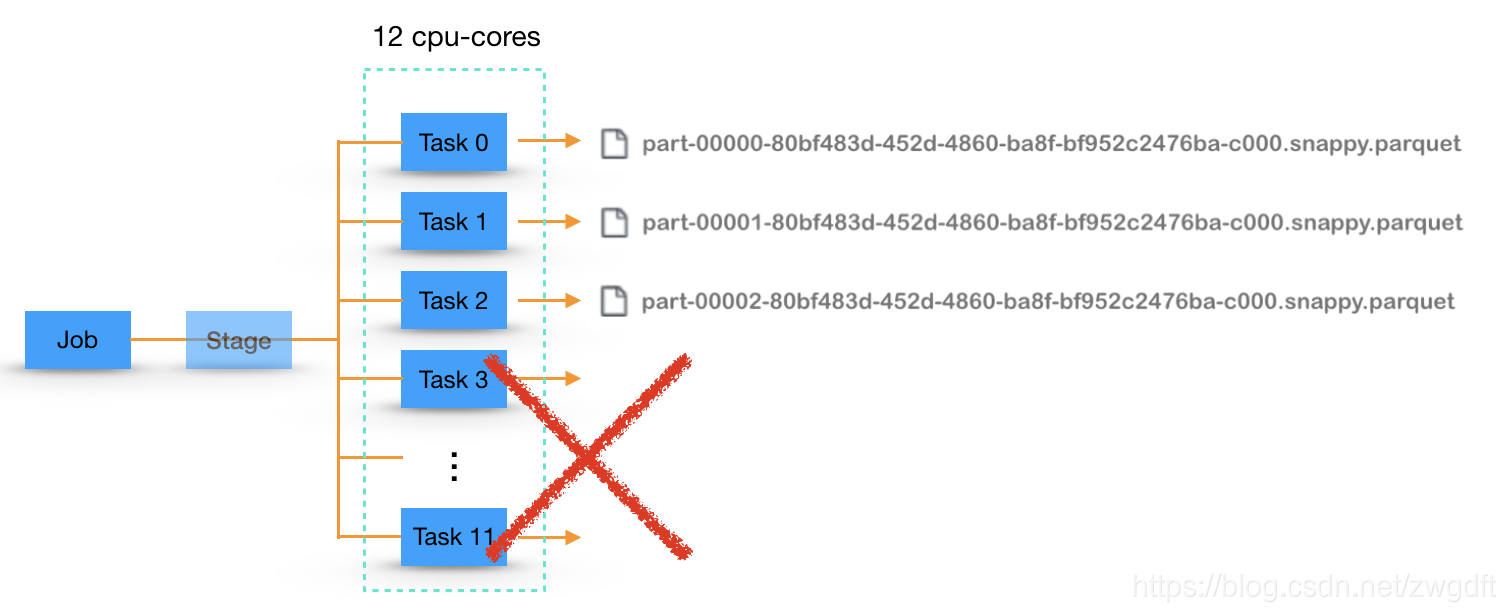
spark-sql数据重复之File Output Committer问题
前言 我们先来回顾下之前介绍过的三种Committer:FileOutputCommitter V1、FileOutputCommitter V2、S3A Committer,其基本代表了整体的演进趋势。 核心代码讲解详细参照:Spark CommitCoordinator 保证数据一致性 OutputCommitter commitTask…...
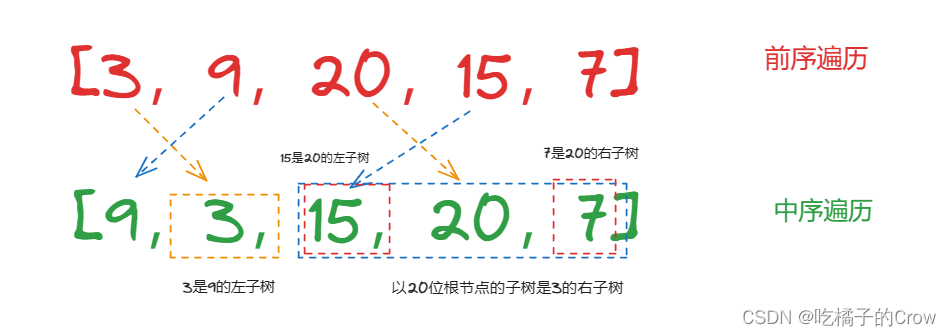
面试热题(前中序遍历构建树)
给定两个整数数组 preorder 和 inorder ,其中 preorder 是二叉树的先序遍历, inorder 是同一棵树的中序遍历,请构造二叉树并返回其根节点。 题目中是给定两个数组,一个是存放这颗树的前序遍历的数组,一个是存放这棵树的…...

美术:贴图
游戏模型制作流程,SP和BP根据情况来选择软件对UV进行处理 3Dmax 制作模型和动画(橘肉)RizomUV 对模型进行展UV(橘皮)Substance Painter 纹理手绘(给橘皮制定想要的皮肤)BodyPaint 3D 纹理手绘&a…...

[MAUI]模仿微信“按住-说话”的交互实现
今天使用这个控件,做一个模仿微信“按住-说话”的小功能,最终效果如下: 使用.NET MAUI实现跨平台支持,本项目可运行于Android、iOS平台。 创建页面布局 新建.NET MAUI项目,命名HoldAndSpeak MainPage.xaml中创建一个…...
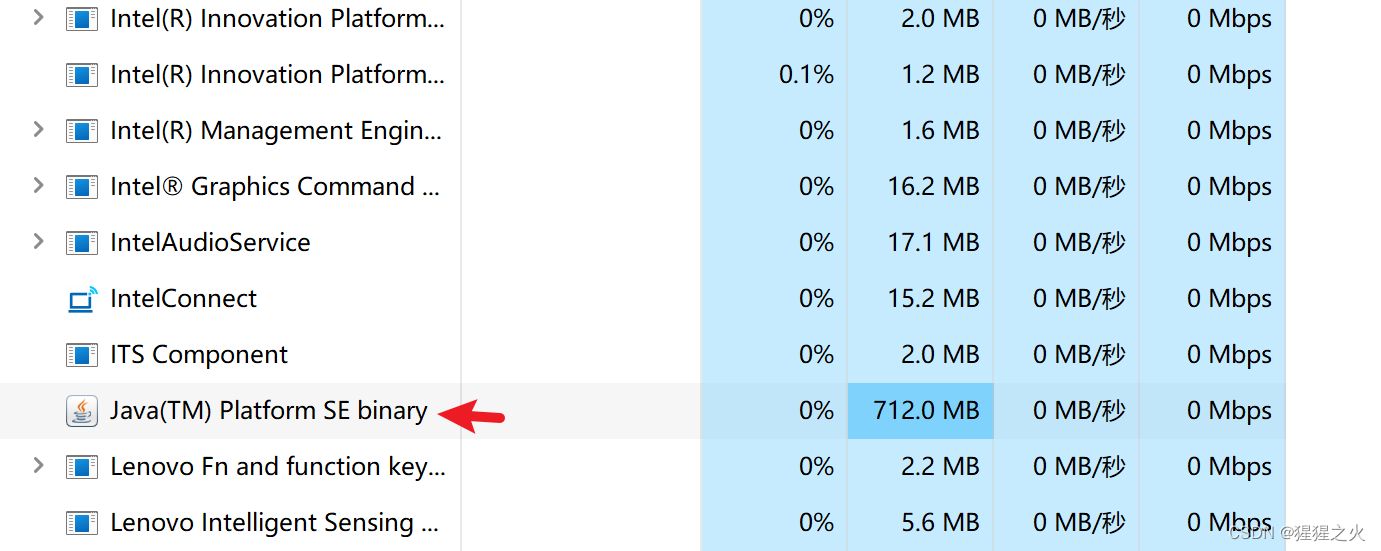
windows开机运行jar
windows开机自启动jar包: 一、保存bat批处理文件 echo off %1 mshta vbscript:CreateObject("WScript.Shell").Run("%~s0 ::",0,FALSE)(window.close)&&exit java -jar E:\projects\ruoyi-admin.jar > E:\server.log 2>&1 &…...

使用DockerFile一键创建自定义linux开发环境
1,使用dcokerfile文件构建镜像,参考如下文件 # 使用ubuntu:20.04镜像作为基础 FROM ubuntu:20.04# 调整时区 ENV DEBIAN_FRONTENDnoninteractive TZAsia/Shanghai# build参数 ARG userxiang usergroupduo# 设置默认工作路径 WORKDIR /home/${user}# 拷贝…...

“深入探索JVM:解密Java虚拟机的工作原理“
标题:深入探索JVM:解密Java虚拟机的工作原理 摘要:本文将深入探索Java虚拟机(JVM)的工作原理,从字节码到实际执行过程,从内存管理到垃圾回收等方面进行解析,帮助读者更好地理解和优…...

【华为OD机试】数字最低位排序【2023 B卷|100分】
【华为OD机试】-真题 !!点这里!! 【华为OD机试】真题考点分类 !!点这里 !! 题目描述 给定一个非空数组(列表) 起元素数据类型为整型 请按照数组元素十进制最低位从小到大进行排序 十进制最低位相同的元素,相对位置保持不变 当数组元素为负值时,十进制最低为等同于去除符号…...

【Odoo16前端源码分析】xml模板的加载
一、模板内容的来源 情况A,组件类的template属性,比如ActionContainer.template /* odoo/addons/web/static/src/webclient/actions/action_container.js */export class ActionContainer extends Component {setup() {..} } .. ActionContainer.templ…...

Open3D (C++) 计算矩阵的广义逆
目录 一、算法原理1、广义逆2、计算过程二、代码实现三、结果展示四、参考链接本文由CSDN点云侠原创,原文链接。爬虫网站自重,把自己当个人,爬些不完整的误导别人有意思吗???? 一、算法原理 1、广义逆 非方阵不存在逆,但是存在广义逆(伪逆)。对于一个矩阵...
11.物联网操作系统内存管理
一。STM32编译过程及程序组成 STM32编译过程 程序的组成、存储与运行 MDK生成的主要文件分析 1.STM32编译过程 1.源文件(Source code)--》目标文件(Object code) .c(C语言)通过armcc生成.o,.s(汇编&…...
举办活动发布会,如何得到媒体支持?
传媒如春雨,润物细无声,大家好,我是51媒体网胡老师。 举办活动发布会并得到媒体报道的支持是一个关键的宣传和推广手段。以下是一些建议,帮助你增加吸引媒体关注和报道的机会: 1. 策划新闻价值:确保你的发…...
函数))
1139 First Contact(unique函数,string.substr()函数)
PTA | 程序设计类实验辅助教学平台 用map套个set来实现邻接表(排序都免了) #include<bits/stdc.h> using namespace std; int n,m,k; string a,b; map<string,set<string>>mp; int main() {cin.tie(0);cin >> n >> m;fo…...

Python元编程-装饰器介绍、使用
目录 一、Python元编程装饰器介绍 二、装饰器使用 1. 实现认证和授权功能 2.实现缓存功能 3.实现日志输出功能 三、附录 1. logging.basicConfig介绍 2. 精确到毫秒,打印时间 方法一:使用datetime 方法二:使用time 一、Python元编程…...

python进程池的使用
进程池的创建 apply() apply()方法用于向进程池提交一个任务,并等待任务完成并返回结果。 apply_async() apply_async()方法用于向进程池提交一个异步任务(即无需等待任务完成),将任务加入到进程池的队列里,并立即…...

紧急更新!Midjourney v6.6对洛可可风格支持突降37%?立即启用这5个兼容性补丁prompt,保住你的商业项目交付期
更多请点击: https://intelliparadigm.com 第一章:Midjourney v6.6洛可可风格兼容性危机全景速览 Midjourney v6.6 发布后,大量用户在生成洛可可(Rococo)风格图像时遭遇显著退化:繁复卷曲的藤蔓纹样被简化…...

如何高效使用League Akari:提升英雄联盟体验的5个实用功能指南
如何高效使用League Akari:提升英雄联盟体验的5个实用功能指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League Akari是一款…...

抢先揭秘 |高端进口宠物食品用品代理商睿哲国际即将亮相广州潮宠展GPI+
抢先揭秘 |高端进口宠物食品用品代理商睿哲国际即将亮相广州潮宠展GPI第四届广州国际潮宠展暨全球宠业生态创新展(GPI)将于6月5-7日在广州保利世贸博览馆盛大启幕!本届展会以“宠业当燃”为全新主题,打造超5万㎡三馆联动的全域生态…...
)
SAP ABAP SM30表维护:手把手教你实现‘运费类型’重复描述校验(附完整代码与避坑指南)
SAP ABAP SM30表维护实战:运费类型唯一性校验的深度解析 在物流管理系统中,运费类型的定义往往需要遵循严格的业务规则。一个常见的需求是确保"运输类型运费代码"与"运费描述"的组合具有唯一性,避免因描述重复导致的操作…...

ComfyUI Manager 架构设计与性能优化:从插件管理到系统集成的完整解决方案
ComfyUI Manager 架构设计与性能优化:从插件管理到系统集成的完整解决方案 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and e…...

从PubMed到VOSviewer:手把手教你用MeSH词表做更精准的医学文献关键词共现分析
从PubMed到VOSviewer:解锁MeSH词表在医学文献分析中的精准力量 医学研究者常面临海量文献的筛选难题——如何从数万篇论文中快速识别核心研究方向?传统的关键词共现分析往往被"aged"、"female"等高频但低区分度的词汇干扰࿰…...

3分钟上手ncmdumpGUI:网易云音乐NCM文件轻松转换的完整指南
3分钟上手ncmdumpGUI:网易云音乐NCM文件轻松转换的完整指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 还在为网易云音乐的NCM格式文件无法在其…...

手把手教你用复旦微FM7Z045芯片在线调试DDR:JTAG与QSPI模式切换避坑指南
复旦微FM7Z045芯片DDR调试实战:模式切换与JTAG连接深度解析 第一次拿到复旦微FM7Z045开发板时,许多工程师都会遇到一个令人困惑的问题——明明按照手册步骤操作,DDR调试却总是失败。这往往不是代码问题,而是模式选择不当导致的。本…...

别再死记硬背了!图解MATLAB形态学:用‘膨胀腐蚀’和‘开闭运算’修复破损老照片
用MATLAB形态学魔法修复老照片:从膨胀腐蚀到开闭运算的实战指南 翻开泛黄的相册,那些承载着记忆的老照片往往布满时间的痕迹——划痕、斑点、缺失的角落。作为图像处理领域的瑞士军刀,MATLAB提供了一套强大的形态学工具,能像数字修…...

工程技巧 用缓存把 Agent 延迟打下来 结果缓存 语义缓存 计划缓存
从3s到300ms:用三级缓存体系把LLM Agent响应延迟打下来|结果缓存+语义缓存+计划缓存全落地指南 副标题:面向LangChain/Agent开发人员的生产级优化方案,附可直接复用的完整代码 摘要/引言 你是不是也遇到过这样的痛点:辛辛苦苦搭好的LLM Agent,功能都跑通了,但是用户问…...