python进程池的使用
进程池的创建
apply()
apply()方法用于向进程池提交一个任务,并等待任务完成并返回结果。
apply_async()
apply_async()方法用于向进程池提交一个异步任务(即无需等待任务完成),将任务加入到进程池的队列里,并立即返回一个AsyncResult对象。
# Pool 表示一个工作进程池
# 如果要启动大量的子进程,可以用进程池的方式批量创建子进程
from multiprocessing.pool import Pool
from time import sleep, time
import random,osdef run(name):print(f'{name},子进程开始,进程ID:{os.getpid()}')start = time()sleep(random.choice([1,2,3,4]))end = time()print(f'{name}子进程结束,进程ID:{os.getpid()},耗时{end-start}')if __name__ == '__main__':print("父进程开始")# 创建多个进程,表示可以同时执行的进程数量,默认大小时cpu的数量p = Pool(4)for i in range(10):# 创建进程,放入进程池统一管理p.apply_async(run,args=(i,))# 如果我们用的时进程池,再调用join()之前必须先调用closs()# 并且closs()之后,不能再继续往进程池添加新的进程了p.close()# 进程池对象调用join(),会等待进程池中所有进程都结束完毕再去结束父进程p.join()print("父进程结束")p.terminate()# close() :如果我们用的是进程池,再调用join()之前必须要先close()
# 并且closs()之后,不能再继续往进程池添加新的进程了
# join():进程池对象调用join(),会等待进程池中所有进程都结束完毕再去结束父进程
# terminate():一旦运行到此步,不管任务是否完成,立即终止
timeout的使用
from multiprocessing import Pool
import timedef f(x):return x*xif __name__ == '__main__':with Pool(processes = 4) as pool: # 进程池包含4个进程result = pool.apply_async(f,args=(10,)) # 执行1个子进程print(result.get(timeout=1)) # 显示执行结果result = pool.apply_async(time.sleep,args=(10,))print(result.get(timeout=1)) # raise multiprocessing.TimeoutError
map的使用
map()方法用于向进程池提交多个任务,并等待所有任务完成并返回结果。
import multiprocessing as mpdef task(num):return num * numif __name__ == "__main__":pool = mp.Pool()res = pool.map(task, [1, 2, 3, 4, 5])print(res)
from multiprocessing import Pool
import timedef f(x):return x * xif __name__ == '__main__':with Pool(processes=4) as pool:print(pool.map(f,range(10))) # 输出"[0,1,4.....81]"it = pool.imap(f,range(10)) # map输出列表,imap输出迭代器print(it)print(next(it)) # "0"print(next(it)) # "1"print(it.next(timeout = 1)) # "4"
map_async()
map_async()方法用于向进程池提交多个异步任务(即无需等待任务完成),并立即返回一个AsyncResult对象。
import multiprocessing as mpdef task(num):return num * numif __name__ == "__main__":pool = mp.Pool()res = pool.map_async(task, [1, 2, 3, 4, 5])print(res.get())
close()和join()
close()方法用于向进程池发送一个停止信号,表示不再接受新任务。
join()方法则用于等待进程池中的所有任务完成。
import multiprocessing as mpdef task(num):return num * numif __name__ == "__main__":pool = mp.Pool()res = pool.map_async(task, [1, 2, 3, 4, 5])pool.close()pool.join()print(res.get())
Python进程池是一种用于在Python中实现并发任务的机制。
在Python中,我们可以通过multiprocessing模块提供的Pool类来实现进程池。
进程池提供了多种方法来处理任务,包括apply()、apply_async()、map()、map_async()等。
在使用进程池时,需要注意不能再向进程池中提交新的任务,否则会引发异常。同时,需要避免使用全局变量,以防止出现不一致的结果。
相关文章:

python进程池的使用
进程池的创建 apply() apply()方法用于向进程池提交一个任务,并等待任务完成并返回结果。 apply_async() apply_async()方法用于向进程池提交一个异步任务(即无需等待任务完成),将任务加入到进程池的队列里,并立即…...

Dockerfile构建lamp镜像
1、构建目录 [rootdocker ~]# mkdir compose_lamp [rootdocker ~]# cd compose_lamp/ 2、编写Docekerfile [rootdocker compose_lamp]# vim Dockerfile #基础镜像 FROM centos:7#维护该镜像的用户信息 MAINTAINER Crushlinux <crushlinux163.com>#安装httpd RUN yum -…...

LeetCode724. 寻找数组的中心下标
题干 给你一个整数数组 nums ,请计算数组的 中心下标 。 数组 中心下标 是数组的一个下标,其左侧所有元素相加的和等于右侧所有元素相加的和。 如果中心下标位于数组最左端,那么左侧数之和视为 0 ,因为在下标的左侧不存在元素。…...

【云计算 | Docker】Docker容器后台运行不了?entrypoint在作妖?
1. 问题 使用镜像alpine起个容器,使其保持后台运行,正常情况有如下的效果,可以发现容器保持运行状态。 [rootk8s-master helloWorld]# docker run -dit docker.io/alpine /bin/sh 8d39d7579d5e4f1a560aef16ba57ab5cae2506ea9105e21cbc0634…...

DAY02_Spring第三方资源配置管理Spring容器Spring注解开发Spring整合Mybatis和Junit
目录 一 第三方资源配置管理1 管理DataSource连接池对象问题导入1.1 管理Druid连接池1.2 管理c3p0连接池 2 加载properties属性文件问题导入2.1 基本用法2.2 配置不加载系统属性2.3 加载properties文件写法 二 Spring容器1 Spring核心容器介绍问题导入1.1 创建容器1.2 获取bean…...

烘焙小程序蛋糕店烘焙店源码点心店小程序源码
本系统开发使用JAVA技术栈开发 使用uniapp技术栈 支持微信小程序 ,对接打印机,对接第三方同城跑腿平台 用户端使用:uniapp 管理端使用:vueelementui 后台服务使用:springbootjpa...

HarmonyOS 开发基础(五)对用户名做点啥
一、实现用户名检验 条件渲染 、生命周期 1.规定用户名长度 2.限定使用的数字及字母(涉及正则表达) // 导出方式直接从文件夹 import MyInput from "../common/commons/myInput" Entry Component /* 组件可以基于struct实现,组件…...
【前端】搭建Vue3框架
目录 一、搭建准备二、node.js安装1、下载并安装2、配置默认安装目录和缓存日志目录①、创建默认安装目录和缓存日志目录(我的node.js目录在D盘,所以直接在node.js文件夹下创建)②、执行命令,配置默认安装目录和缓存日志目录到刚才…...
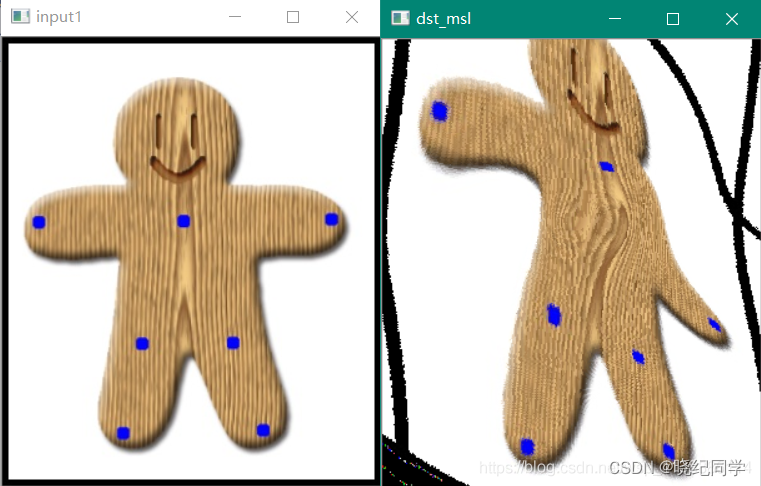
Opencv-C++笔记 (15) : 像素重映射 与 图像扭曲
文章目录 一、重映射简介二、图像扭曲 一、重映射简介 重映射,就是把一幅图像中某位置的像素放置到另一图像指定位置的过程。即: 在重映射过程中,图像的大小也可以同时发生改变。此时像素与像素之间的关系就不是一一对应关系,因…...
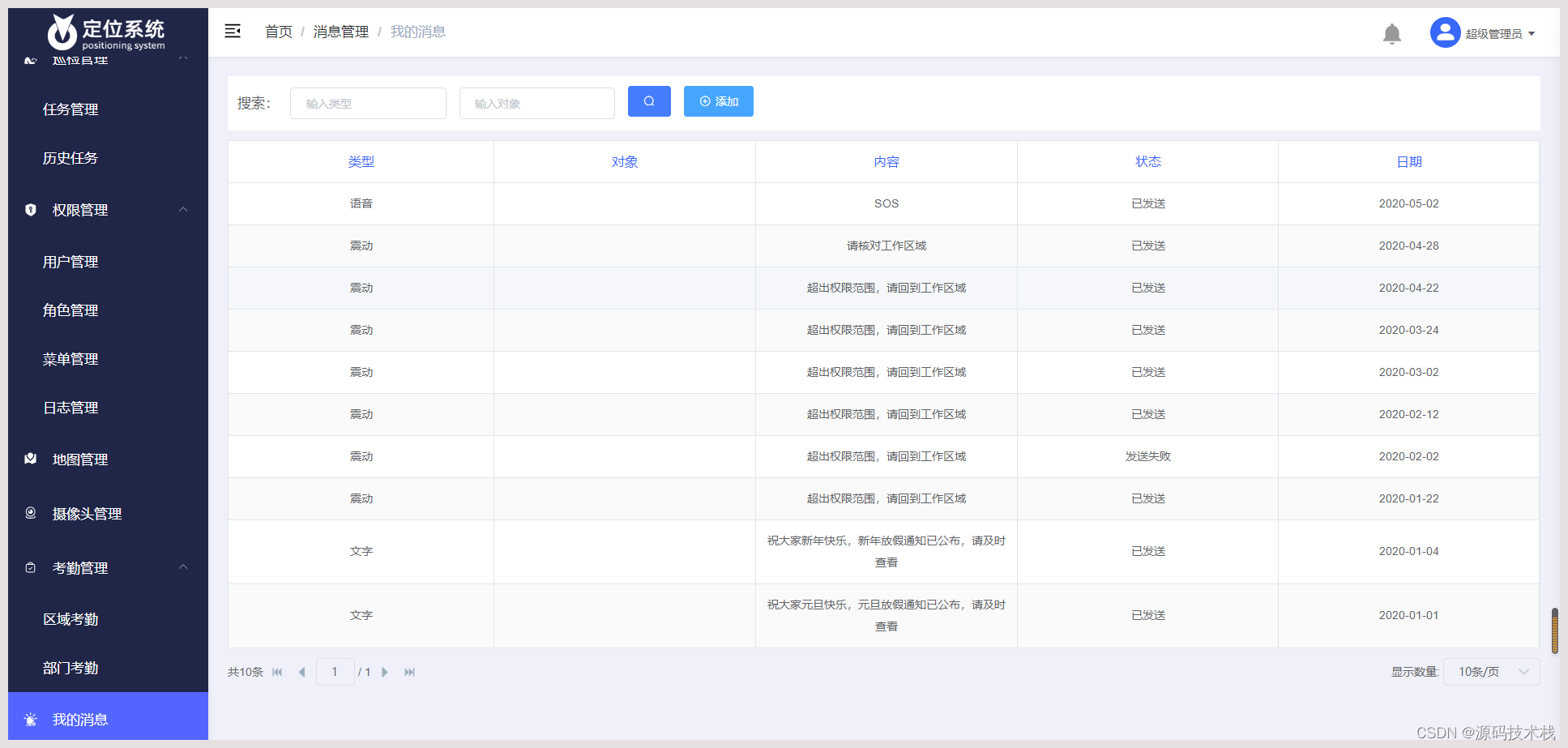
【Java】UWB高精度工业人员安全定位系统源码
基于VueSpring boot前后端分离架构开发的一套UWB技术高精度定位系统源码。 UWB高精度人员定位系统提供实时定位、电子围栏、轨迹回放等基础功能以及各种拓展功能,用户可根据实际需要任意选择搭配拓展功能。该系统简易部署,方便使用,实时响应。UWB高精度定…...
)
文本NLP噪音预处理(加拼写检查)
最近总结修改了下预处理方法,记录下 首先download需要的依赖 pip install pyenchantpip install nltk pyenchant 是用来检测拼写正确的,如果你的文本里面可能包含非正确拼写的单词,那就忽略它,nltk用来做分词的。 python -m nlt…...

[Docker实现测试部署CI/CD----自由风格的CI操作[最终架构](5)]
目录 11、自由风格的CI操作(最终)Jenkins容器化实现方案修改 docker.sock 权限修改 Jenkins 启动命令后重启 Jenkins构建镜像推送到Harbor修改 daemon.json 文件Jenkins 删除构建后操作Jenkins 添加 shell 命令重新构建 Jenkins通知目标服务器拉取镜像目…...

纯JS+Vue实现一个仪表盘
在使用canvas的时候发现数值变化,每次都要重新渲染,值都从0开始,这和我的需求冲突。 1. 先绘制基本的圆环背景,利用border-color和border-radius将正方形变成基本的圆环。 <div class"circle"><div class&qu…...
)
标定(内参、外参)
在计算机视觉中,特别是在相机标定和立体视觉领域,内参(intrinsic parameters)和外参(extrinsic parameters)是非常重要的概念。它们与相机的几何属性和姿态有关。 内参(Intrinsic Parameters&am…...
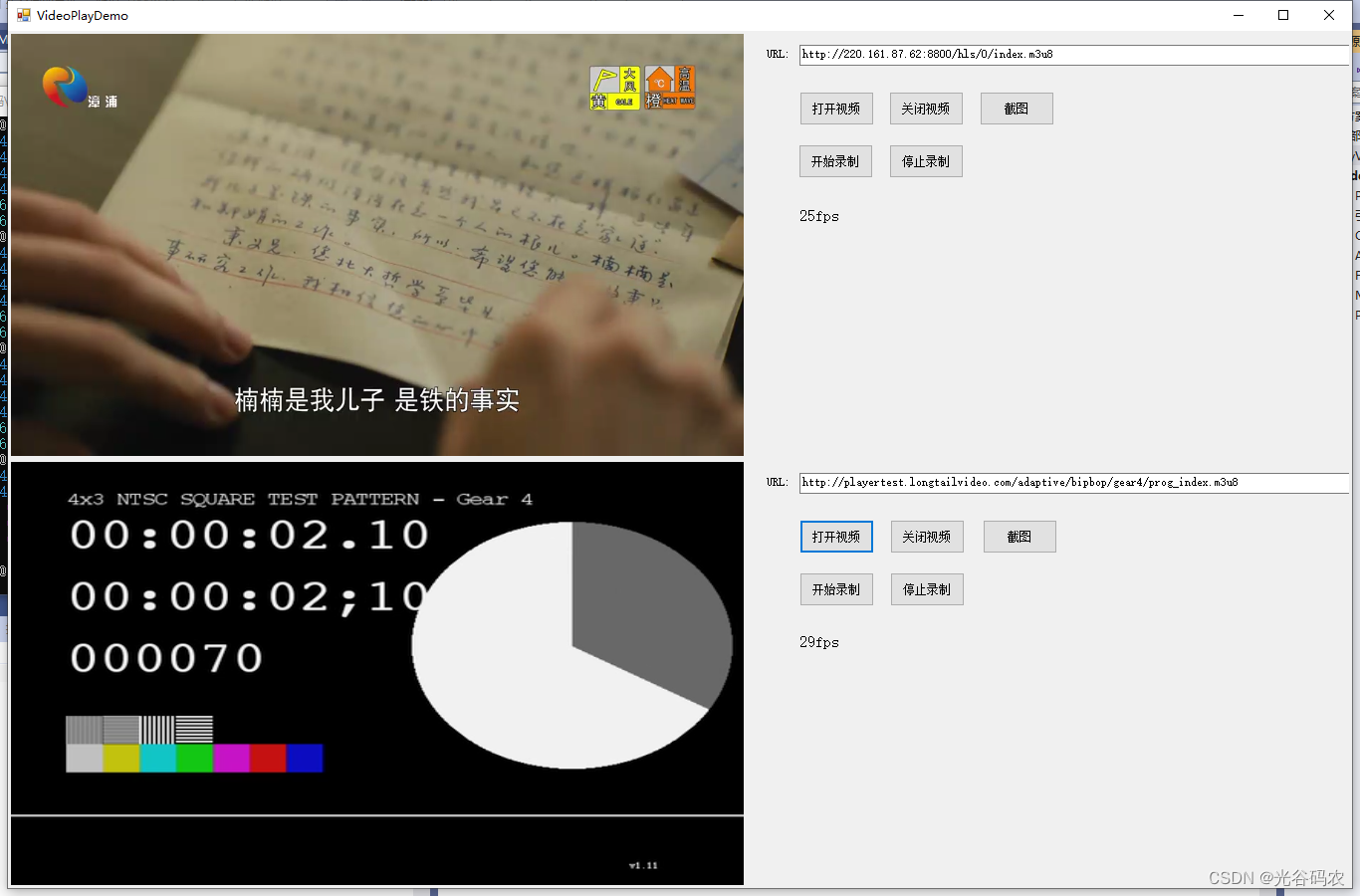
基于ffmpeg与SDL的视频播放库
由于工作需要,自己封装的基于ffmpeg的视频编解码库,显示采用了SDL库。可以播放本地文件或网络流,支持多端口播放,支持文字叠加,截图、视频录制等等。 头文件代码: #pragma once #ifdef __DLLEXPORT #defin…...
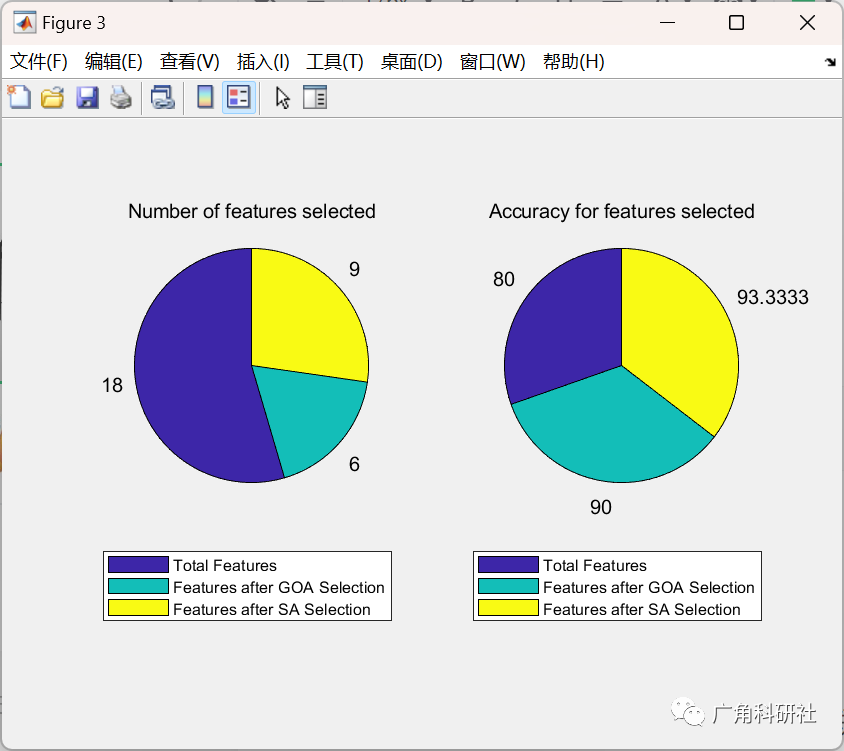
基于二进制草蝉优化算法选择特征并使用 KNN 进行训练(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 👨💻4 Matlab代码 💥1 概述 基于二进制草蝉优化算法选择特征并使用KNN(K-Nearest Neighbors,K最近邻算法)进行训练是一种…...
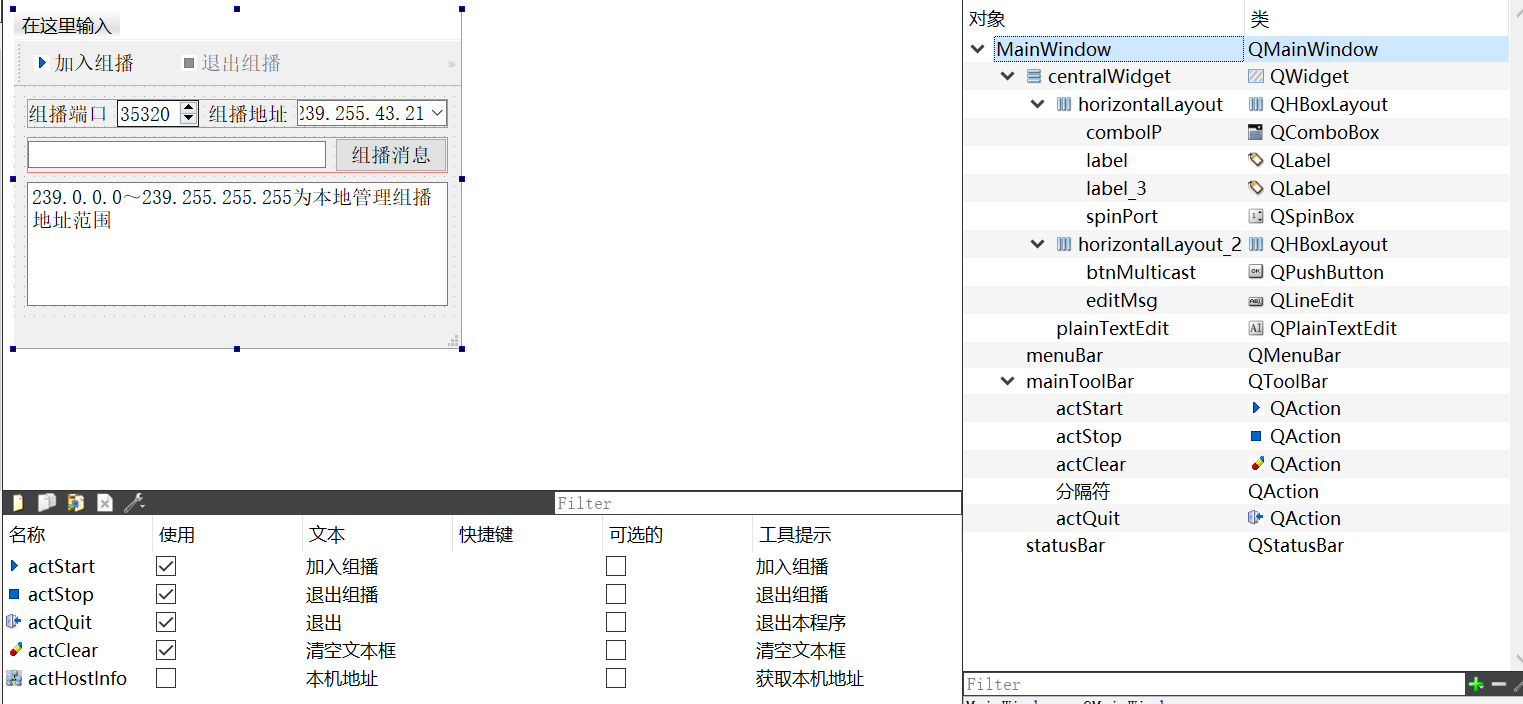
14-4_Qt 5.9 C++开发指南_QUdpSocket实现 UDP 通信_UDP组播
文章目录 1. UDP组播的特性2. UDP 组播实例程序的功能3. 组播功能的程序实现4. 源码4.1 可视化UI设计4.2 mainwindow.h4.3 mainwindow.cpp 1. UDP组播的特性 下图简单表示了组播的原理。UDP 组播是主机之间“一对一组”的通信模式,当多个客户端加入由一个组播地址定…...
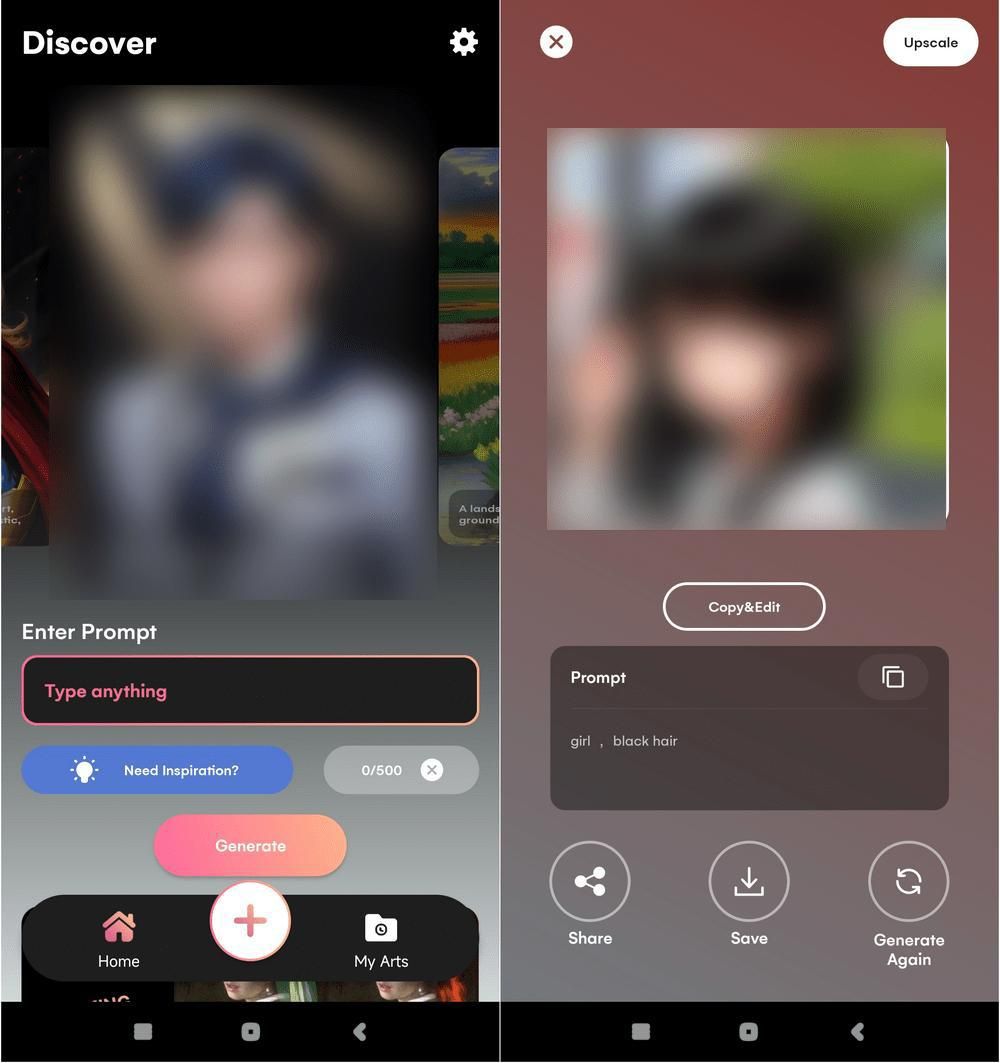
ai图片合成软件帮你创造个性绚丽
嘿!悄悄告诉你一个小秘密,现在有一款超酷的软件,它能让你的图片变得活灵活现,就像跳出了屏幕一样!没错,这就是ai图片制作软件!想象一下,你拍摄了一张美丽的风景照片,但总…...

git 版本回退
git 没有push之前,可以用git reset --mixed回退,就是把add 的内容和commit的内容都撤销 在push之后,你只有2种操作 1.git reset 退回到你想要的那个版本 有配置选项 如果是soft就是当前版本删掉,之前改的代码保留,ha…...
)
使用Jackson自定义序列化操作(Jackson – Custom Serializer)
目录 Standard Serialization of an Object GraphCustom Serializer on the ObjectMapperCustom Serializer on the Class Standard Serialization of an Object Graph Data NoArgsConstructor AllArgsConstructor public class Item {public int id;public String itemName;p…...

本地视频怎么去水印?2026 视频去水印方法与软件推荐指南
概述:为什么要给视频去水印 视频水印是内容平台的标识符,但在某些场景下会影响使用体验——比如下载的视频要用于素材库、制作集锦或进行二次编辑时,水印就成了累赘。本文总结了2026年最实用的本地视频去水印方法,涵盖手机小程序、…...

如何快速上手Meeko:分子对接参数化的完整指南
如何快速上手Meeko:分子对接参数化的完整指南 【免费下载链接】Meeko Interface for AutoDock, molecule parameterization 项目地址: https://gitcode.com/gh_mirrors/me/Meeko 想要在药物发现和分子相互作用研究中获得精准的对接结果吗?Meeko作…...

2026年专业DS - 660 BGA返修系统揭秘
在电子设备维修领域,BGA返修系统至关重要。今天就来揭秘DELLSON的DS - 660 BGA返修系统。操作便捷性DS - 660采用全自动一键式操作,简单易用。相比传统返修系统,操作步骤减少50%,大大提高维修效率。建议维修人员进行简单培训后即可…...

终极游戏光标解决方案:YoloMouse让你的鼠标在游戏中清晰可见
终极游戏光标解决方案:YoloMouse让你的鼠标在游戏中清晰可见 【免费下载链接】YoloMouse Game Cursor Changer 项目地址: https://gitcode.com/gh_mirrors/yo/YoloMouse 你是否曾在激烈的游戏战斗中迷失了鼠标光标?当屏幕上特效绚烂、技能乱飞时&…...

CIO与CHRO携手合作,共同留住企业AI核心人才
Gartner上周发布的一项研究显示,到2027年,缺乏完善AI人才战略的企业,将有半数面临顶尖AI人才流失至竞争对手的风险。为完成这份报告,Gartner在今年第一季度对逾12000名企业员工和管理者进行了调研,重点了解AI对工作的影…...

5步掌握Sollumz:让GTA V模型在Blender中自由编辑
5步掌握Sollumz:让GTA V模型在Blender中自由编辑 【免费下载链接】Sollumz Grand Theft Auto V modding suite for Blender. This add-on allows the creation of modded game assets: 3D models, maps, interiors, animations, etc. 项目地址: https://gitcode.c…...
)
40岁IT运维被裁了,换赛道!一切皆有可能(普通人可借鉴)
40岁IT运维被裁了,换赛道!一切皆有可能(普通人可借鉴) 外人总觉得做IT很轻松,敲敲键盘就能赚钱。只有业内人清楚,这行根本藏不住焦虑。技术更新太快。 40岁的职业红线,一直压在所有IT人身上。…...
HSTracker:macOS炉石传说智能追踪器终极指南,免费提升你的游戏胜率
HSTracker:macOS炉石传说智能追踪器终极指南,免费提升你的游戏胜率 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 你是否在炉石传说对战中总是感…...
)
告别仿真卡顿!Synopsys AXI VIP Memory模型实战:从地址配置到后门读写(附避坑指南)
告别仿真卡顿!Synopsys AXI VIP Memory模型实战:从地址配置到后门读写(附避坑指南) 在复杂SoC验证中,仿真速度直接决定了项目周期。当AXI总线上的数据吞吐量达到GB/s级别时,传统的前门读写操作会让仿真器陷…...

VoiceFixer终极指南:三分钟让模糊录音变清晰的免费语音修复神器
VoiceFixer终极指南:三分钟让模糊录音变清晰的免费语音修复神器 【免费下载链接】voicefixer General Speech Restoration 项目地址: https://gitcode.com/gh_mirrors/vo/voicefixer 你是否曾经因为一段珍贵的录音模糊不清而遗憾?也许是重要的会议…...