Opencv-C++笔记 (15) : 像素重映射 与 图像扭曲
文章目录
- 一、重映射简介
- 二、图像扭曲
一、重映射简介
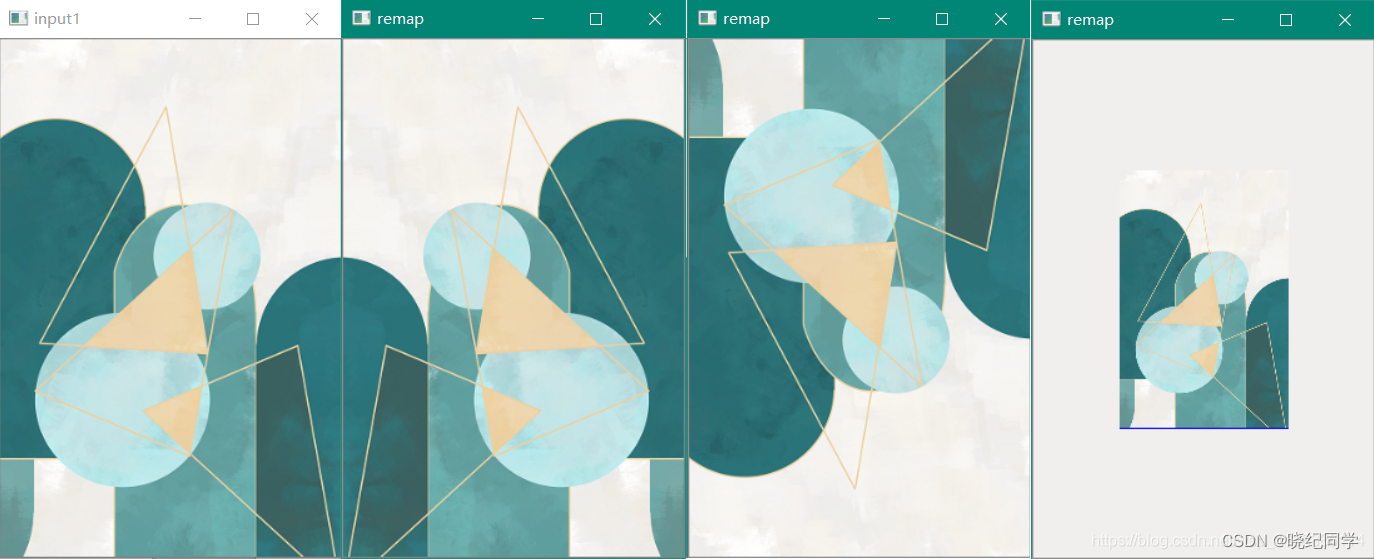
重映射,就是把一幅图像中某位置的像素放置到另一图像指定位置的过程。即:

在重映射过程中,图像的大小也可以同时发生改变。此时像素与像素之间的关系就不是一一对应关系,因此在重映射过程中,可能会涉及到像素值的插值计算。
Remap(
InputArray src, 输入图像(灰度图或真彩图均可)
OutputArray dst, 输出图像(要求大小和xmap,ymap相同,通道数目及数据类型和src相同)
InputArray map1, x 映射表 CV_32FC1/CV_32FC2
InputArray map2, y 映射表
int interpolation, 选择的插值方法,常见线性插值,可选择立方等
int borderMode, BORDER_CONSTANT
const Scalar borderValue color
)
头文件 quick_opencv.h:声明类与公共函数
#pragma once
#include <opencv2\opencv.hpp>
using namespace cv;class QuickDemo {
public:...void remap_Demo(Mat& image1);void MLS(Mat& src, std::vector<Point> p, std::vector<Point> q);void MLS(Mat& src, int* p, int* q, int rows, int cols);
};
主函数调用该类的公共成员函数
#include <opencv2\opencv.hpp>
#include <quick_opencv.h>
#include <iostream>
using namespace cv;int main(int argc, char** argv) {Mat src = imread("D:\\Desktop\\pandas_small22.png");if (src.empty()) {printf("Could not load images...\n");return -1;}QuickDemo qk;qk.remap_Demo(src);vector<Point> p{Point(30, 147), Point(147, 147), Point(268, 147), Point(112, 148),Point(186, 148), Point(98, 316), Point(211, 316)};vector<Point> q{ Point(28, 209), Point(126, 143), Point(282, 26), Point(71, 236), Point(136, 240), Point(79, 313), Point(190, 310)};qk.MLS(src1, p, q);int p_array[7][2] = { {30, 147}, {147, 147}, {268, 147}, {112, 148}, {186, 148}, {98, 316}, {211, 316} };int q_array[7][2] = { {28, 209}, {126, 143}, {282, 26}, {71, 236}, {136, 240}, {79, 313}, {190, 310} };qk.MLS(src1, (int *)p_array, (int*)q_array, 7, 2);waitKey(0);destroyAllWindows();return 0;
}
源文件 quick_demo.cpp:实现类与公共函数
void update_map(Mat& image, int index, Mat& x_map, Mat& y_map) {int height = image.rows;int width = image.cols;double h_41 = height * 0.25;double h_43 = height * 0.75;double w_41 = width * 0.25;double w_43 = width * 0.75;for (int h = 0; h < height; h++) {float* x_ptr = x_map.ptr<float>(h);float* y_ptr = y_map.ptr<float>(h);for (int w = 0; w < width; w++) {switch (index){case 0:if (h > h_41 && h < h_43 && w>w_41 && w < w_43) {*x_ptr++ = 2 * (w - w_41 + 0.5);*y_ptr++ = 2 * (h - h_41 + 0.5);}else{*x_ptr++ = 0;*y_ptr++ = 0;}break;case 1:*x_ptr++ = width - w - 1;*y_ptr++ = h;break;case 2:*x_ptr++ = w;*y_ptr++ = height - h - 1;break;case 3:*x_ptr++ = width - w - 1;*y_ptr++ = height - h - 1;break;}}}}
void QuickDemo::remap_Demo(Mat& image) {Mat dst, x_map, y_map;int index = 0;x_map.create(image.size(), CV_32FC1);y_map.create(image.size(), CV_32FC1);int c = 0;while (true){c = waitKey(400);if ((char)c==27){break;}index = c % 4;update_map(image,index, x_map, y_map);remap(image, dst, x_map, y_map, INTER_LINEAR, BORDER_CONSTANT, Scalar(255, 0, 0));imshow("remap", dst);}
}如上两个函数,update_map,用于更新remap的具体映射方法,remap_Demo为调用函数。
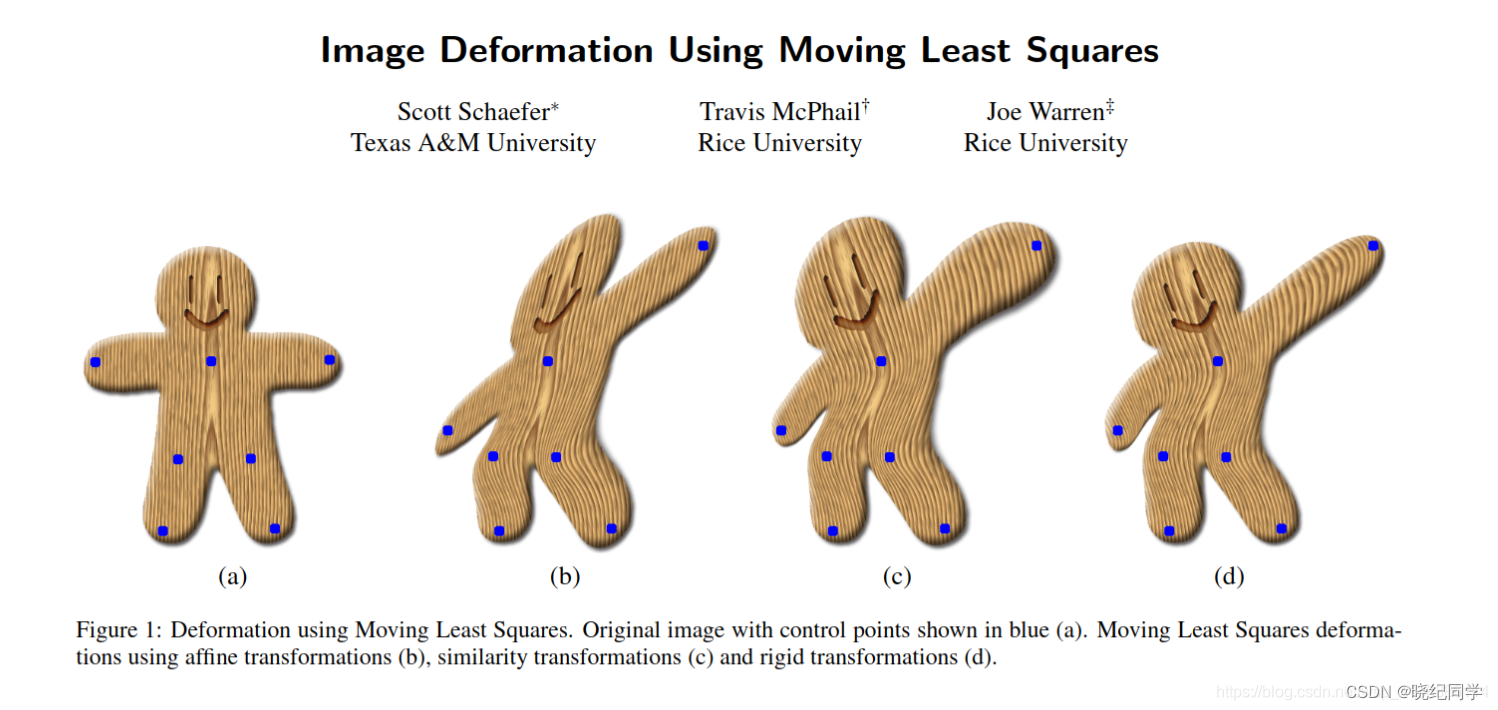
二、图像扭曲
MLS算法 图像扭曲 Image Deformation Using Moving Least Squares 论文。
最小二乘法(MLS)对图像进行变形 python 实现
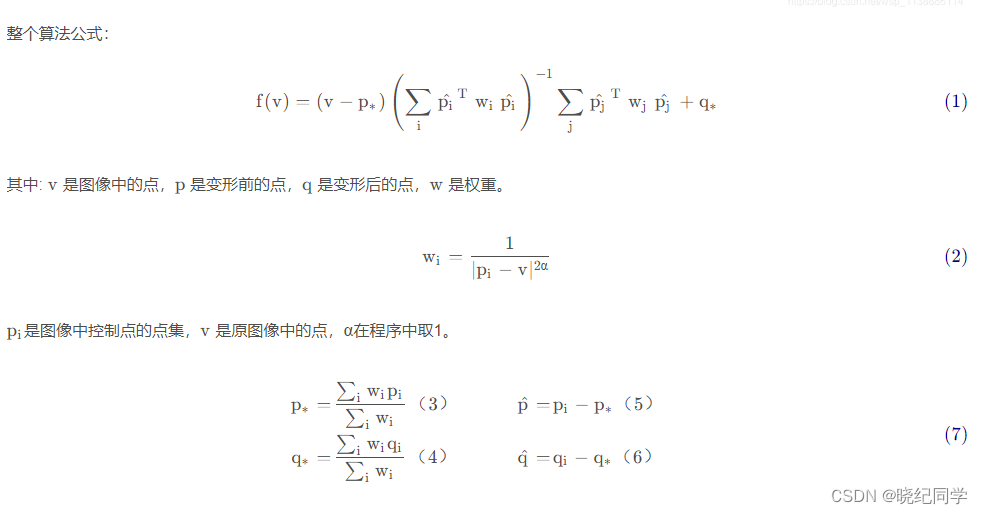
Point NewPoint(Point V, vector<Point> p, vector<Point> q){vector<float>W;Point p_star, q_star = Point(0, 0);for (int i = 0; i <= p.size() - 1; i++){float temp;if (p[i] == V){temp = INT_MAX;}else{temp = 1.0 / (((p[i].x - V.x) * (p[i].x - V.x)) + ((p[i].y - V.y) * (p[i].y - V.y)));}W.push_back(temp);}float px = 0, py = 0, qx = 0, qy = 0, W_sum = 0;for (int i = 0; i <= W.size() - 1; i++){px += W[i] * p[i].x;py += W[i] * p[i].y;qx += W[i] * q[i].x;qy += W[i] * q[i].y;W_sum += W[i];}p_star.x = px / W_sum;p_star.y = py / W_sum;q_star.x = qx / W_sum;q_star.y = qy / W_sum;vector<Point> p_hat, q_hat;for (int i = 0; i <= p.size() - 1; i++){p_hat.push_back(p[i] - p_star);q_hat.push_back(q[i] - q_star);}Mat pi_hat_t_ = Mat::zeros(2, 1, CV_32FC1);Mat_<float> pi_hat_t = pi_hat_t_;Mat pi_hat_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> pi_hat = pi_hat_;Mat M_1_ = Mat::zeros(2, 2, CV_32FC1);Mat_<float> M_1 = M_1_;for (int i = 0; i <= p_hat.size() - 1; i++){pi_hat_t.at<float>(0, 0) = p_hat[i].x;pi_hat_t.at<float>(1, 0) = p_hat[i].y;pi_hat.at<float>(0, 0) = p_hat[i].x;pi_hat.at<float>(0, 1) = p_hat[i].y;M_1 += pi_hat_t * W[i] * pi_hat;}Mat_<float> M_1_inv = M_1.inv();M_1 = M_1_inv;Mat pj_hat_t_ = Mat::zeros(2, 1, CV_32FC1);Mat_<float> pj_hat_t = pj_hat_t_;Mat qj_hat_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> qj_hat = qj_hat_;Mat M_2_ = Mat::zeros(2, 2, CV_32FC1);Mat_<float> M_2 = M_2_;for (int j = 0; j <= q.size() - 1; j++){pj_hat_t.at<float>(0, 0) = p_hat[j].x;pj_hat_t.at<float>(1, 0) = p_hat[j].y;qj_hat.at<float>(0, 0) = q_hat[j].x;qj_hat.at<float>(0, 1) = q_hat[j].y;M_2 += W[j] * pj_hat_t * qj_hat;}Mat_<float> M = M_1 * M_2;//ok//cout << "M = " << M << endl;Point x_p_star = V - p_star;Mat M_x_p_star_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> M_x_p_star = M_x_p_star_;M_x_p_star.at<float>(0, 0) = x_p_star.x;M_x_p_star.at<float>(0, 1) = x_p_star.y;Mat M_q_star_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> M_q_star = M_q_star_;M_q_star.at<float>(0, 0) = q_star.x;M_q_star.at<float>(0, 1) = q_star.y;Mat_<float> Lv = M_x_p_star * M + M_q_star;return Point(Lv.at<float>(0, 0), Lv.at<float>(0, 1));
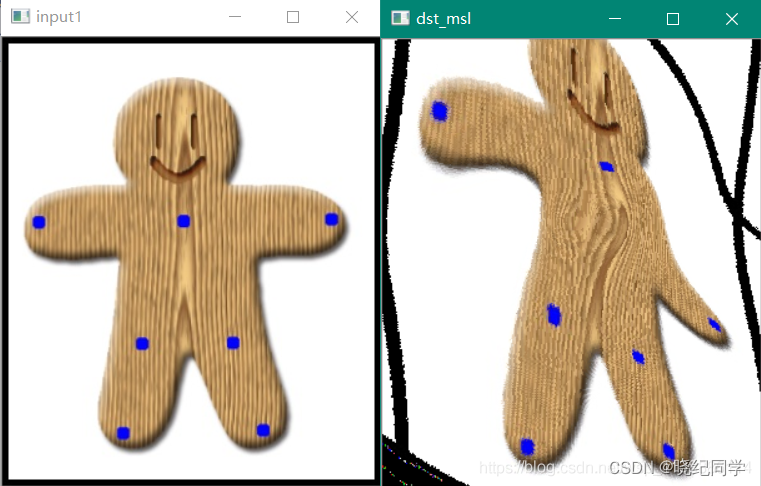
}void QuickDemo::MLS(Mat& src, std::vector<Point> p, std::vector<Point> q){double time0 = static_cast<double>(getTickCount());Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);for (int i = 0; i < src.rows; i++){for (int j = 0; j < src.cols; j++){Point old = Point(j, i);Point new_point = NewPoint(old, p, q);//cout << "old = " << old << "\tnew = " << new_point << endl;dst.at<Vec3b>(i, j) = src.at<Vec3b>(abs(new_point.y), abs(new_point.x));}}double time1 = static_cast<double>(getTickCount());cout << "Total cost time is " << ((time1 - time0) / getTickFrequency()) << "seconds" << endl;imshow("dst_msl", dst);
}
重载函数
Point NewPoint(Point V, float* W, int* p, int* q , float* p_hat, float* q_hat, int rows, int cols) {Point p_star, q_star = Point(0, 0);float temp = 0;float px = 0, py = 0, qx = 0, qy = 0, W_sum = 0;for (int i = 0; i < rows; i++) {int p_0 = *(p + i * cols);int p_1 = *(p + i * cols + 1);if (!(p_0 == V.x && p_1 == V.y)) {temp = 1.0 / (((p_0 - V.x) * (p_0 - V.x)) + ((p_1 - V.y) * (p_1 - V.y)));}else {temp = INT_MAX;}W[i] = temp;px += temp * p_0;py += temp * p_1;qx += temp * (*(q + i * cols));qy += temp * (*(q + i * cols + 1));W_sum += temp;}p_star.x = px / W_sum;p_star.y = py / W_sum;q_star.x = qx / W_sum;q_star.y = qy / W_sum;for (int i = 0; i < rows; i++) {*(p_hat + i * cols) = *(p + i * cols) - p_star.x;*(p_hat + i * cols + 1) = *(p + i * cols + 1) - p_star.y;*(q_hat + i * cols) = *(q + i * cols) - p_star.x;*(q_hat + i * cols + 1) = *(q + i * cols + 1) - p_star.y;}// ====================================Mat pi_hat_t_ = Mat::zeros(2, 1, CV_32FC1);Mat_<float> pi_hat_t = pi_hat_t_;Mat pi_hat_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> pi_hat = pi_hat_;Mat M_1_ = Mat::zeros(2, 2, CV_32FC1);Mat_<float> M_1 = M_1_;// ====================================Mat pj_hat_t_ = Mat::zeros(2, 1, CV_32FC1);Mat_<float> pj_hat_t = pj_hat_t_;Mat qj_hat_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> qj_hat = qj_hat_;Mat M_2_ = Mat::zeros(2, 2, CV_32FC1);Mat_<float> M_2 = M_2_;// ====================================for (int i = 0; i < rows; i++) {float p_hat_x = *(p_hat + i * cols);float p_hat_y = *(p_hat + i * cols + 1);pi_hat_t.at<float>(0, 0) = p_hat_x;pi_hat_t.at<float>(1, 0) = p_hat_y;pi_hat.at<float>(0, 0) = p_hat_x;pi_hat.at<float>(0, 1) = p_hat_y;M_1 += pi_hat_t * W[i] * pi_hat;pj_hat_t.at<float>(0, 0) = p_hat_x;pj_hat_t.at<float>(1, 0) = p_hat_y;qj_hat.at<float>(0, 0) = *(q_hat + i * cols);qj_hat.at<float>(0, 1) = *(q_hat + i * cols + 1);M_2 += pj_hat_t * W[i] * qj_hat;}Mat_<float> M_1_inv = M_1.inv();M_1 = M_1_inv;Mat_<float> M = M_1 * M_2;//=====================================//// 如下为总公式计算////======================================Point x_p_star = V - p_star;Mat M_x_p_star_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> M_x_p_star = M_x_p_star_;M_x_p_star.at<float>(0, 0) = x_p_star.x;M_x_p_star.at<float>(0, 1) = x_p_star.y;Mat M_q_star_ = Mat::zeros(1, 2, CV_32FC1);Mat_<float> M_q_star = M_q_star_;M_q_star.at<float>(0, 0) = q_star.x;M_q_star.at<float>(0, 1) = q_star.y;Mat_<float> Lv = M_x_p_star * M + M_q_star;return Point(Lv.at<float>(0, 0), Lv.at<float>(0, 1));}void QuickDemo::MLS(Mat& src, int* p, int* q, int rows, int cols) {double time0 = static_cast<double>(getTickCount());Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);assert(7 == rows); // 若断言失败请修改如下三个数组的长度为rowsfloat W[7] = { 0 }; // 权重长度为p数组长度:rows=7float p_hat[7][2] = { 0 }; // p_hat长度为p数组长度:rows=7float q_hat[7][2] = { 0 }; // q_hat长度为p数组长度:rows=7for (int i = 0; i < src.rows; i++) {for (int j = 0; j < src.cols; j++) {Point new_point = NewPoint(Point(j, i), W, p, q, (float*)p_hat, (float*)p_hat, rows, cols);//cout << "old = " << old << "\tnew = " << new_point << endl;dst.at<Vec3b>(i, j) = src.at<Vec3b>(abs(new_point.y), abs(new_point.x));//cout << "src.at<uchar> = " << src.at<Vec3b>(new_point.y,new_point.x) << endl;}}double time1 = static_cast<double>(getTickCount());cout << "Total cost time is " << ((time1 - time0) / getTickFrequency()) << "seconds" << endl;imshow("dst_msl", dst);
}
————
鸣谢与拓展阅读:
使用范例 记录四图像处理之瘦脸 MLS算法 C++实现
OpenCV局部变形算法探究添加链接描述
基于移动最小二乘(MLS)的图像扭曲刚性变形python实现
使用重映射实现图像的局部扭曲 来实现 图像增强。
相关文章:
Opencv-C++笔记 (15) : 像素重映射 与 图像扭曲
文章目录 一、重映射简介二、图像扭曲 一、重映射简介 重映射,就是把一幅图像中某位置的像素放置到另一图像指定位置的过程。即: 在重映射过程中,图像的大小也可以同时发生改变。此时像素与像素之间的关系就不是一一对应关系,因…...
【Java】UWB高精度工业人员安全定位系统源码
基于VueSpring boot前后端分离架构开发的一套UWB技术高精度定位系统源码。 UWB高精度人员定位系统提供实时定位、电子围栏、轨迹回放等基础功能以及各种拓展功能,用户可根据实际需要任意选择搭配拓展功能。该系统简易部署,方便使用,实时响应。UWB高精度定…...
)
文本NLP噪音预处理(加拼写检查)
最近总结修改了下预处理方法,记录下 首先download需要的依赖 pip install pyenchantpip install nltk pyenchant 是用来检测拼写正确的,如果你的文本里面可能包含非正确拼写的单词,那就忽略它,nltk用来做分词的。 python -m nlt…...

[Docker实现测试部署CI/CD----自由风格的CI操作[最终架构](5)]
目录 11、自由风格的CI操作(最终)Jenkins容器化实现方案修改 docker.sock 权限修改 Jenkins 启动命令后重启 Jenkins构建镜像推送到Harbor修改 daemon.json 文件Jenkins 删除构建后操作Jenkins 添加 shell 命令重新构建 Jenkins通知目标服务器拉取镜像目…...

纯JS+Vue实现一个仪表盘
在使用canvas的时候发现数值变化,每次都要重新渲染,值都从0开始,这和我的需求冲突。 1. 先绘制基本的圆环背景,利用border-color和border-radius将正方形变成基本的圆环。 <div class"circle"><div class&qu…...
)
标定(内参、外参)
在计算机视觉中,特别是在相机标定和立体视觉领域,内参(intrinsic parameters)和外参(extrinsic parameters)是非常重要的概念。它们与相机的几何属性和姿态有关。 内参(Intrinsic Parameters&am…...
基于ffmpeg与SDL的视频播放库
由于工作需要,自己封装的基于ffmpeg的视频编解码库,显示采用了SDL库。可以播放本地文件或网络流,支持多端口播放,支持文字叠加,截图、视频录制等等。 头文件代码: #pragma once #ifdef __DLLEXPORT #defin…...
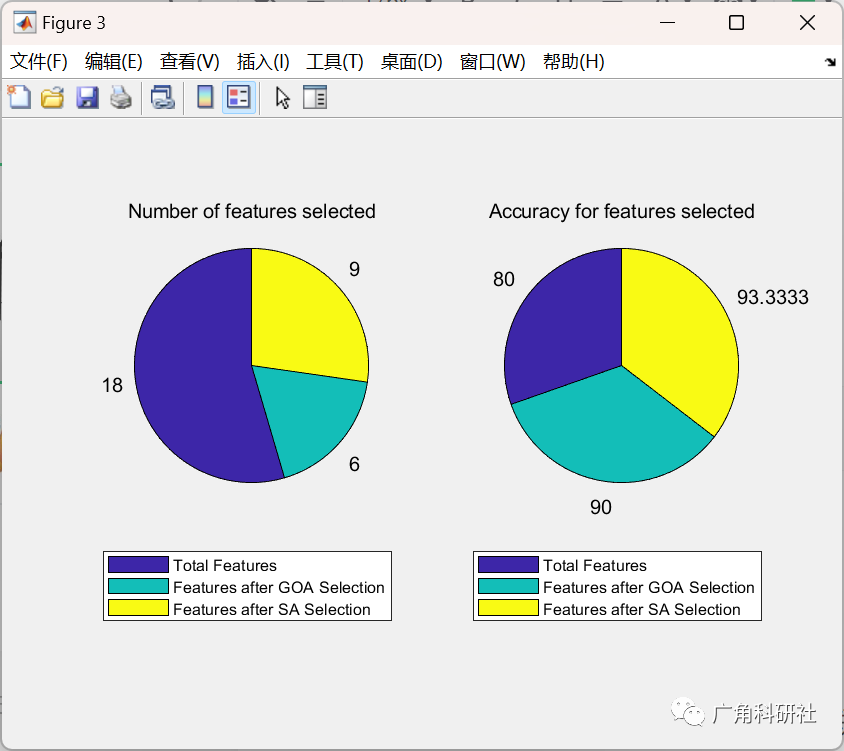
基于二进制草蝉优化算法选择特征并使用 KNN 进行训练(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 👨💻4 Matlab代码 💥1 概述 基于二进制草蝉优化算法选择特征并使用KNN(K-Nearest Neighbors,K最近邻算法)进行训练是一种…...
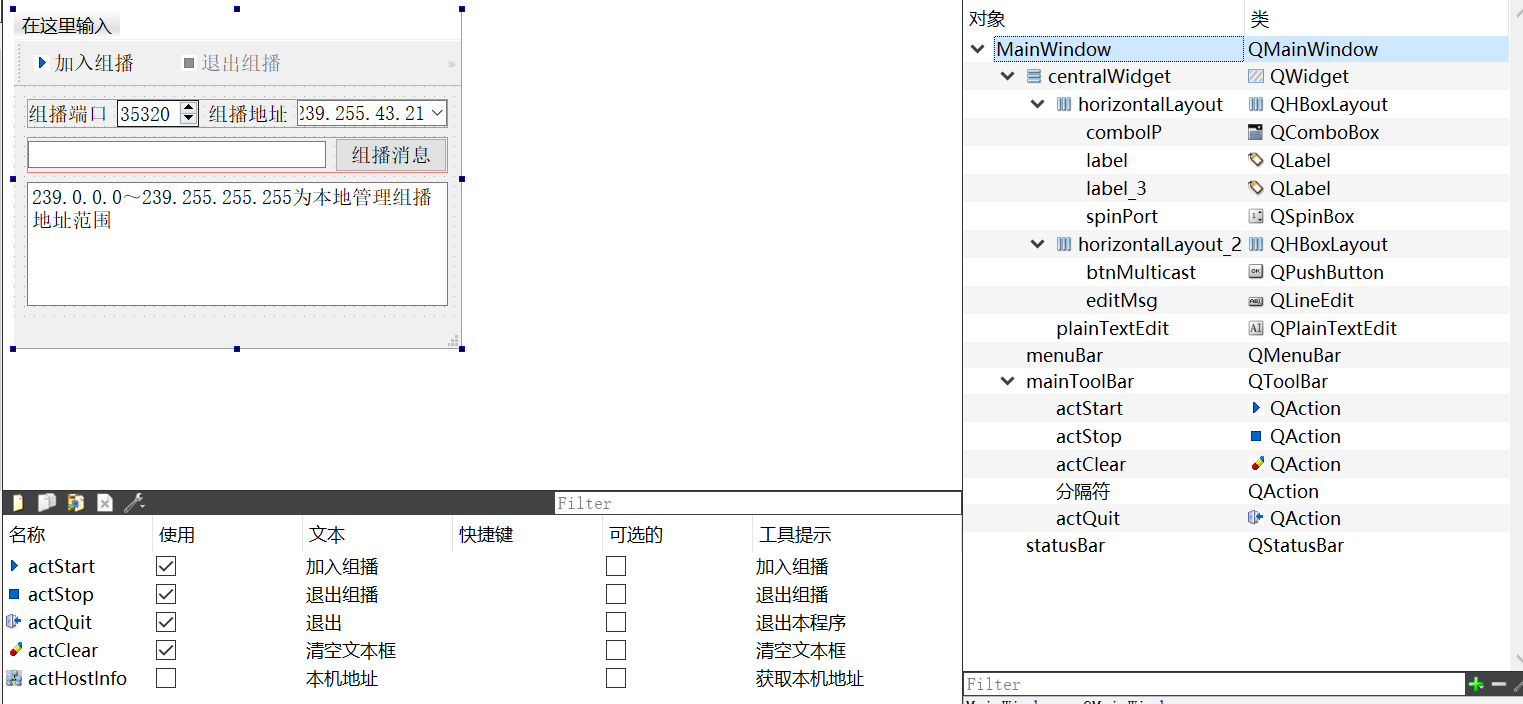
14-4_Qt 5.9 C++开发指南_QUdpSocket实现 UDP 通信_UDP组播
文章目录 1. UDP组播的特性2. UDP 组播实例程序的功能3. 组播功能的程序实现4. 源码4.1 可视化UI设计4.2 mainwindow.h4.3 mainwindow.cpp 1. UDP组播的特性 下图简单表示了组播的原理。UDP 组播是主机之间“一对一组”的通信模式,当多个客户端加入由一个组播地址定…...
ai图片合成软件帮你创造个性绚丽
嘿!悄悄告诉你一个小秘密,现在有一款超酷的软件,它能让你的图片变得活灵活现,就像跳出了屏幕一样!没错,这就是ai图片制作软件!想象一下,你拍摄了一张美丽的风景照片,但总…...

git 版本回退
git 没有push之前,可以用git reset --mixed回退,就是把add 的内容和commit的内容都撤销 在push之后,你只有2种操作 1.git reset 退回到你想要的那个版本 有配置选项 如果是soft就是当前版本删掉,之前改的代码保留,ha…...
)
使用Jackson自定义序列化操作(Jackson – Custom Serializer)
目录 Standard Serialization of an Object GraphCustom Serializer on the ObjectMapperCustom Serializer on the Class Standard Serialization of an Object Graph Data NoArgsConstructor AllArgsConstructor public class Item {public int id;public String itemName;p…...

Python-元组
元组(Tuples)详解 在Python中,元组(Tuples)是一种有序的数据类型,它可以包含任意类型的元素,包括数字、字符串、列表等。与列表相似,元组也是用来存储一组数据,但与列表…...
快速转换PDF文件: Python和PyMuPDF教程
解决问题 有时候将文档上传Claude2做分析,有大小限制,所以需要切割pdf文档为几个小点的文档,故才有了本文章。 如何用Python和PyMuPDF制作你想要大小的PDF? PDF是一种广泛使用的文件格式,可以在任何设备上查看和打印…...
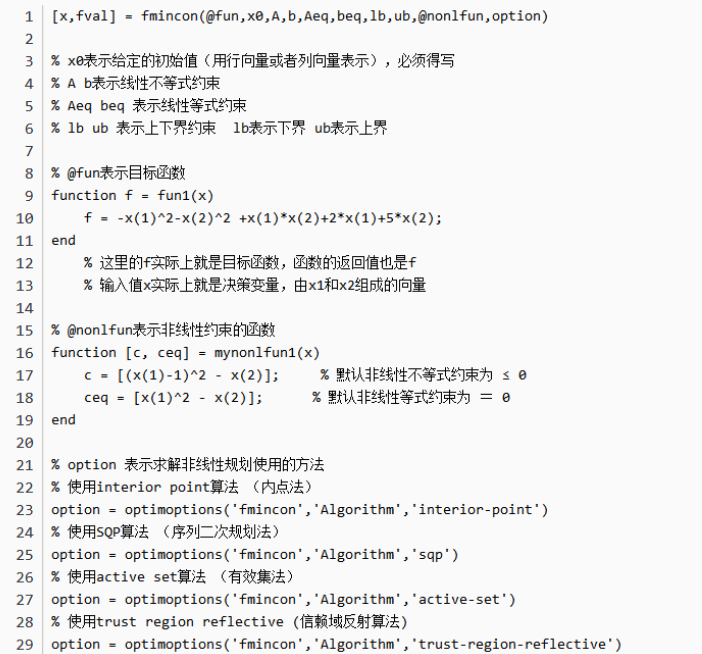
规划模型Matlab代码
文章目录 数学规划定义一般形式分类 1.线性规划(linear programming)2.非线性规划(nonlinear programming)3. 整数规划(integer programming)4. 0-1规划(0-1 programming)5. 最大最小化模型6. 多目标规划模型7.敏感性分析(对权重)[例题] 数学规划定义 数…...
用html+javascript打造公文一键排版系统11:改进单一附件说明排版
一、用htmljavascript打造公文一键排版系统10中的一个bug 在 用htmljavascript打造公文一键排版系统10:单一附件说明排版 中,我们对附件说明的排版函数是: function setAtttDescFmt(p) {var t p;var a ;if (-1 ! t.indexOf(:))//是半角冒…...

snap xxx has “install-snap“ change in progress
error description * 系重复安装,进程冲突 solution 展示snap的改变 然后sudo snap abort 22即可终止该进程 之后重新运行install command~~ PS: ubuntu有时候加载不出来,执行resolvectl flush-caches,清除dns缓存…...

Elasticsearch 性能调优指南
目录 1、通用优化策略 1.1 通用最小化法则 1.2 职责单一原则 1.3 其他 2、写性能调优 2.1 基本原则 2.2 优化手段 2.2.1 增加 flush 时间间隔, 2.2.2 增加refresh_interval的参数值 2.2.3 增加Buffer大小, 2.2.4 关闭副本 2.2.5 禁用swap 2…...

学习Boost一:学习方法和学习目的
学习目的 Boost 的学习目的: 因为从知乎和CSND上根据了解内容来看,Boost作为一个历史悠久的开源库,已经脱离了一个单纯的库的概念了,他因庞大的涉及面应当被称之为库集。 并且,因为boost库优秀的试用反馈和开发人员的…...

c语言每日一练(1)
前言: 每日一练系列,每一期都包含5道选择题,2道编程题,博主会尽可能详细地进行讲解,令初学者也能听的清晰。每日一练系列会持续更新,暑假时三天之内必有一更,到了开学之后,将看学业情…...

Midjourney V6色调分离失效?3步修复色相断层、5类常见错误代码级诊断指南
更多请点击: https://kaifayun.com 第一章:Midjourney V6色调分离失效的本质归因 Midjourney V6 引入了更严格的色彩空间一致性约束与隐式色彩嵌入机制,导致传统依赖 HSV/HSL 分量操控的“色调分离”(Color Separation࿰…...

被遗忘的女程序员沙拉:用模拟程序为互联网奠基,却因家庭放弃编程
为互联网奠基的女程序员沙拉 数学教师沙拉博姆利用暑假编写代码,她之后开发的东西最终演变成了互联网。作者包括凯蒂哈夫纳、萨米亚布齐德、劳拉伊森西以及科学领域被遗忘的女性倡议组织。 沙拉的编程之路 沙拉博姆从加州大学洛杉矶分校获得教学学位后,投…...

Gophish钓鱼页面制作指南:从克隆腾讯企业邮箱到数据收集
Gophish钓鱼页面制作实战:从企业邮箱克隆到数据捕获全流程 在企业安全防护体系中,钓鱼攻击模拟演练已成为检验员工安全意识的重要手段。作为开源钓鱼框架的标杆,Gophish以其模块化设计和易用性,成为红队演练的标配工具。本文将深…...

Unity 2019格斗游戏开发:帧同步、输入缓冲与Hitbox/Hurtbox实现
1. 为什么2019版Unity仍是横板格斗开发的“黄金锚点”我带过三届游戏开发训练营,每次开课前都会问学员:“你最想用哪个版本做格斗游戏?”——超过七成的人脱口而出“最新版”。但当我把他们拉进一个用Unity 2019.4.40f1跑通的《街霸》风格连招…...

Kimi推出超实用插件!让AI真正像你一样操作浏览器
月之暗面(Moonshot AI)正式推出了一款名为 Kimi WebBridge 的浏览器扩展插件。这款产品的核心理念是让AI Agent像你本人一样操作浏览器。它带着你的登录状态、你的Cookie、你的账号,去点击、滑动、输入,填写表单、提取信息、跨站点…...

PDF怎么转Word不变形?2026保留原排版方法与软件推荐
PDF转Word时遇到排版错乱是许多办公人士的共同困扰。无论是报告、合同还是设计稿,排版混乱往往意味着需要重新手工调整,浪费大量时间。本文整合了2026年最实用的PDF转Word保留原排版方法,以及各类软件工具的详细对比,帮助你快速找…...

Kernel-Bridge API完全参考手册:从CPU操作到内存管理
Kernel-Bridge API完全参考手册:从CPU操作到内存管理 【免费下载链接】Kernel-Bridge Windows kernel hacking framework, driver template, hypervisor and API written on C 项目地址: https://gitcode.com/gh_mirrors/ke/Kernel-Bridge Kernel-Bridge是一…...

DH1766电源短路测试避坑指南:为什么你的保险丝熔断时间和想象的不一样?
DH1766电源短路测试中的保险丝熔断现象深度解析 在电子工程实验室中,可编程电源的短路测试是验证电路保护器件性能的常规操作。然而,当使用DH1766这类高精度电源进行测试时,许多工程师都会遇到一个令人困惑的现象:保险丝的实际熔断…...

魔百盒CM311-1s刷机后体验:安卓9.0固件到底香不香?附5621DS无线实测
魔百盒CM311-1s刷机实战:安卓9.0系统深度评测与无线性能揭秘 当手中的魔百盒CM311-1s遇上安卓9.0系统,这场硬件与软件的碰撞会擦出怎样的火花?作为一款搭载S905L3B芯片的电视盒子,其原生系统往往受限于运营商定制化限制࿰…...

VBO协议
VBO...