标定(内参、外参)
在计算机视觉中,特别是在相机标定和立体视觉领域,内参(intrinsic parameters)和外参(extrinsic parameters)是非常重要的概念。它们与相机的几何属性和姿态有关。
-
内参(Intrinsic Parameters): 内参是描述相机内部属性的参数,包括焦距、主点(光学中心)坐标、畸变系数等。内参通常在相机标定时确定,因为它们通常对于特定相机型号是固定的,不随时间变化。一旦相机内参被确定,它们在相机的使用过程中通常是保持不变的。
-
外参(Extrinsic Parameters): 外参是描述相机在世界坐标系中的位置和姿态的参数,通常包括旋转矩阵和平移向量。外参在不同的相机位置或拍摄时刻可能会发生变化。例如,在立体视觉中,如果您有两个相机,那么它们的相对位置和方向会在每次移动相机时发生变化,从而导致外参的变化。
如果相机不发生位置和方向的变化,比如相机固定在一个固定位置,那么外参在很长一段时间内可能保持不变。然而,如果相机的位置或方向发生变化,例如移动相机或更改拍摄角度,外参会随之变化。
当将图像放大或缩小时,相机的内参和外参是否需要变化取决于放大/缩小的尺度以及具体的情况。下面我会讨论两种情况:
-
仅图像尺寸发生变化,相机保持固定位置和方向: 如果您只是对图像进行简单的放大或缩小操作,而相机的位置和方向保持不变,通常情况下,相机的内参(如焦距、主点坐标等)是不需要改变的。这是因为这些内参与相机成像的几何属性有关,而不受图像尺寸的影响。
-
相机位置或方向发生变化,导致场景中的物体尺寸变化: 如果相机的位置或方向发生变化,导致了场景中物体的尺寸变化,那么内参和外参可能都需要进行调整。例如,如果您将相机从原来的位置移动到一个新的位置,或者更改了相机的方向,那么外参需要更新以反映这些变化。内参方面,如果相机的焦距或主点坐标发生变化,也可能需要进行调整。
需要注意的是,调整相机的内参和外参需要进行精确的标定过程。如果图像放大/缩小的尺度不大,并且相机位置和方向没有显著变化,通常情况下可以考虑保持内参和外参不变。但如果尺度变化较大,或者相机位置和方向发生了明显的变化,那么进行相应的标定以更新内参和外参是非常重要的,以确保后续的计算和分析能够准确地反映真实世界的情况。
如果硬件没有变化,只是对图像进行插值放大,增加了分辨率,通常情况下相机的内参和外参不需要调整变化。
内参(如焦距、主点坐标等)是与相机本身的物理属性有关的参数,与图像的分辨率没有直接关系。因此,在仅仅是对图像进行插值放大,分辨率增加一倍的情况下,相机的内参是保持不变的。
外参(如相机的位置和方向)通常是与相机的物理安装位置和姿态有关的参数。只要相机的实际位置和方向没有改变,外参也应该保持不变。在这种情况下,即使图像的分辨率增加了,外参也不需要调整。
综上所述,在仅仅是对图像进行插值放大,分辨率增加一倍,而相机硬件和位置没有发生变化的情况下,内参和外参通常不需要调整变化。这是因为这些参数与相机的硬件属性和位置关系紧密,而与图像的分辨率无关。
在双目立体视觉中,视差图是由左右两个相机拍摄的图像计算得出的,用于表示不同像素之间的深度差异。如果您仅仅是对图像进行插值放大,增加了分辨率,而相机硬件和位置没有发生变化,通常情况下视差图不需要进行调整变化。
视差图的计算主要依赖于像素之间的几何关系,例如像素的位置、相机的基线(左右相机之间的距离)等。这些几何关系通常是相机的内参和外参的基础,而内参和外参通常与相机硬件和位置有关,与图像的分辨率无关。
因此,在仅仅是对图像进行插值放大,分辨率增加一倍,相机硬件和位置没有发生变化的情况下,视差图通常不需要调整变化。您可以继续使用原来的相机参数和算法来计算视差图,只需将插值放大后的图像输入到算法中即可。
然而,如果您的放大操作导致了图像中某些特征的明显改变,例如物体的边界变得模糊,那么可能需要重新考虑视差计算的方法,以确保正确地捕捉深度信息。在这种情况下,您可能需要对视差算法进行微调,以适应图像放大引起的变化。
相关文章:
)
标定(内参、外参)
在计算机视觉中,特别是在相机标定和立体视觉领域,内参(intrinsic parameters)和外参(extrinsic parameters)是非常重要的概念。它们与相机的几何属性和姿态有关。 内参(Intrinsic Parameters&am…...
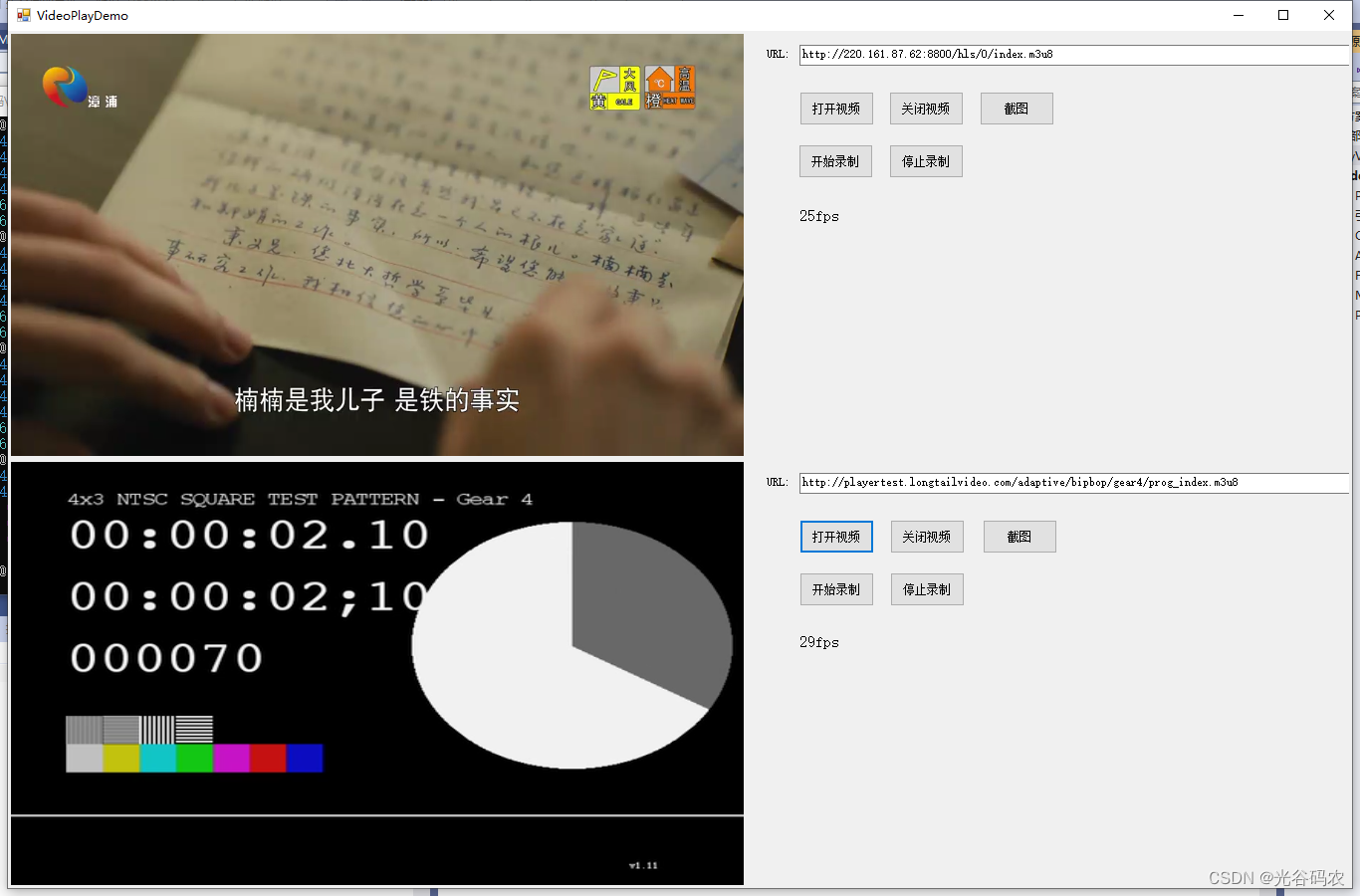
基于ffmpeg与SDL的视频播放库
由于工作需要,自己封装的基于ffmpeg的视频编解码库,显示采用了SDL库。可以播放本地文件或网络流,支持多端口播放,支持文字叠加,截图、视频录制等等。 头文件代码: #pragma once #ifdef __DLLEXPORT #defin…...
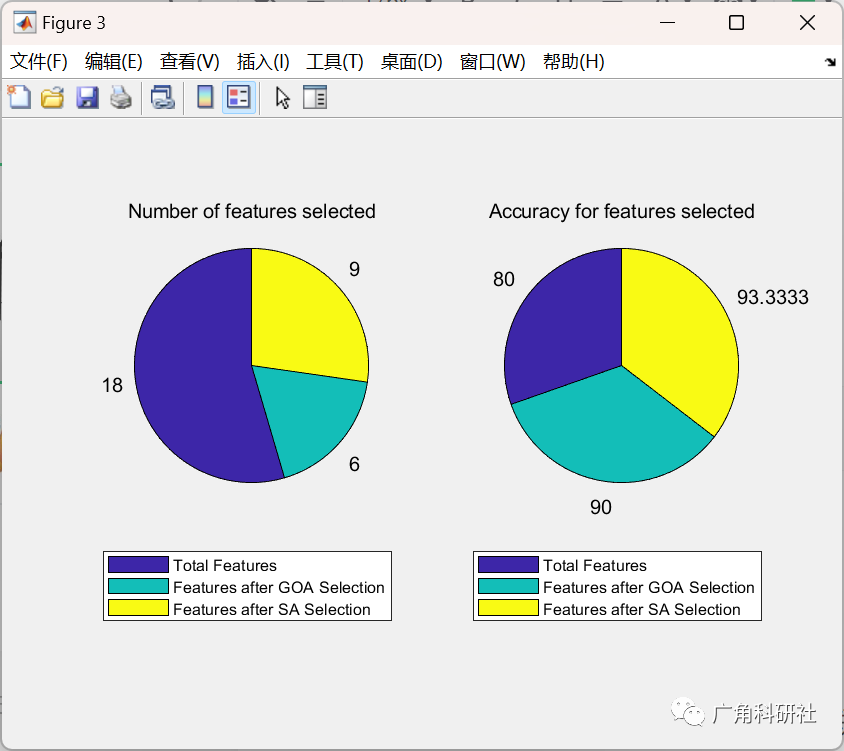
基于二进制草蝉优化算法选择特征并使用 KNN 进行训练(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 👨💻4 Matlab代码 💥1 概述 基于二进制草蝉优化算法选择特征并使用KNN(K-Nearest Neighbors,K最近邻算法)进行训练是一种…...
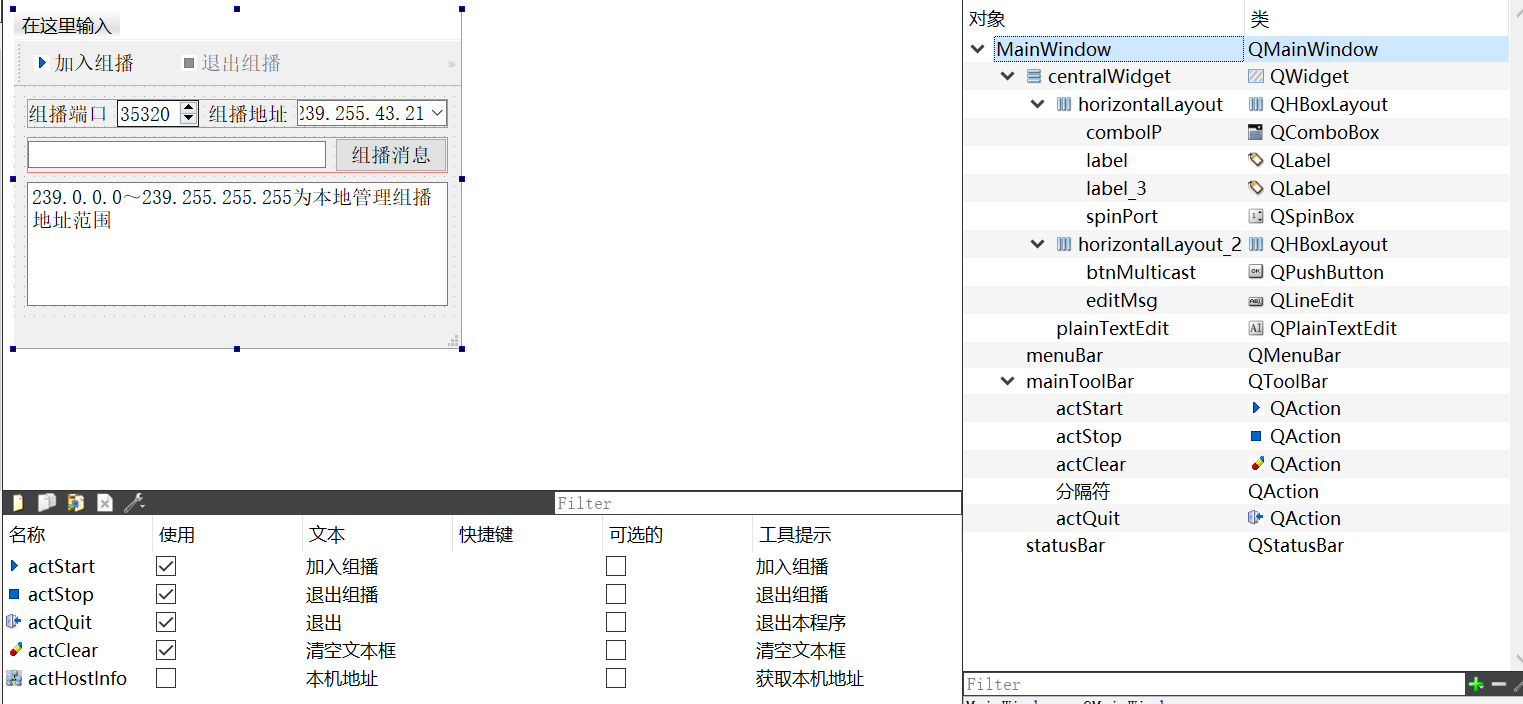
14-4_Qt 5.9 C++开发指南_QUdpSocket实现 UDP 通信_UDP组播
文章目录 1. UDP组播的特性2. UDP 组播实例程序的功能3. 组播功能的程序实现4. 源码4.1 可视化UI设计4.2 mainwindow.h4.3 mainwindow.cpp 1. UDP组播的特性 下图简单表示了组播的原理。UDP 组播是主机之间“一对一组”的通信模式,当多个客户端加入由一个组播地址定…...
ai图片合成软件帮你创造个性绚丽
嘿!悄悄告诉你一个小秘密,现在有一款超酷的软件,它能让你的图片变得活灵活现,就像跳出了屏幕一样!没错,这就是ai图片制作软件!想象一下,你拍摄了一张美丽的风景照片,但总…...

git 版本回退
git 没有push之前,可以用git reset --mixed回退,就是把add 的内容和commit的内容都撤销 在push之后,你只有2种操作 1.git reset 退回到你想要的那个版本 有配置选项 如果是soft就是当前版本删掉,之前改的代码保留,ha…...
)
使用Jackson自定义序列化操作(Jackson – Custom Serializer)
目录 Standard Serialization of an Object GraphCustom Serializer on the ObjectMapperCustom Serializer on the Class Standard Serialization of an Object Graph Data NoArgsConstructor AllArgsConstructor public class Item {public int id;public String itemName;p…...

Python-元组
元组(Tuples)详解 在Python中,元组(Tuples)是一种有序的数据类型,它可以包含任意类型的元素,包括数字、字符串、列表等。与列表相似,元组也是用来存储一组数据,但与列表…...
快速转换PDF文件: Python和PyMuPDF教程
解决问题 有时候将文档上传Claude2做分析,有大小限制,所以需要切割pdf文档为几个小点的文档,故才有了本文章。 如何用Python和PyMuPDF制作你想要大小的PDF? PDF是一种广泛使用的文件格式,可以在任何设备上查看和打印…...
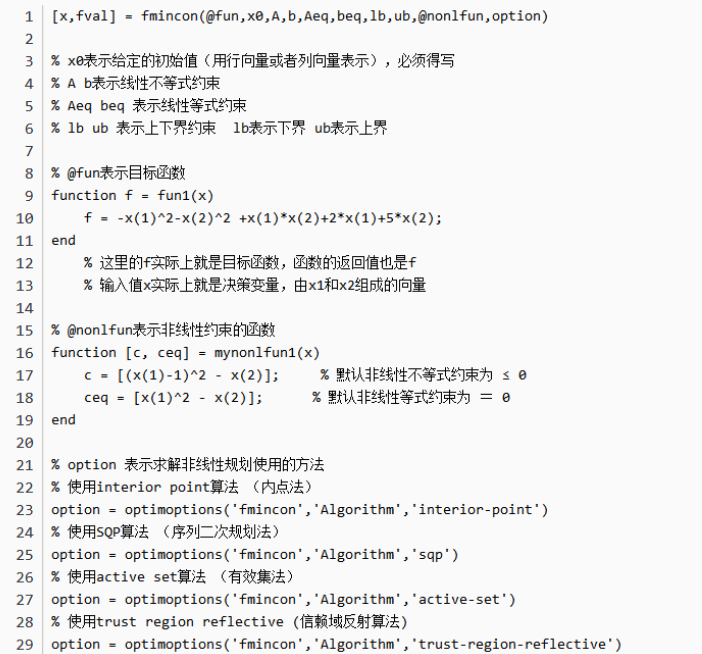
规划模型Matlab代码
文章目录 数学规划定义一般形式分类 1.线性规划(linear programming)2.非线性规划(nonlinear programming)3. 整数规划(integer programming)4. 0-1规划(0-1 programming)5. 最大最小化模型6. 多目标规划模型7.敏感性分析(对权重)[例题] 数学规划定义 数…...
用html+javascript打造公文一键排版系统11:改进单一附件说明排版
一、用htmljavascript打造公文一键排版系统10中的一个bug 在 用htmljavascript打造公文一键排版系统10:单一附件说明排版 中,我们对附件说明的排版函数是: function setAtttDescFmt(p) {var t p;var a ;if (-1 ! t.indexOf(:))//是半角冒…...

snap xxx has “install-snap“ change in progress
error description * 系重复安装,进程冲突 solution 展示snap的改变 然后sudo snap abort 22即可终止该进程 之后重新运行install command~~ PS: ubuntu有时候加载不出来,执行resolvectl flush-caches,清除dns缓存…...

Elasticsearch 性能调优指南
目录 1、通用优化策略 1.1 通用最小化法则 1.2 职责单一原则 1.3 其他 2、写性能调优 2.1 基本原则 2.2 优化手段 2.2.1 增加 flush 时间间隔, 2.2.2 增加refresh_interval的参数值 2.2.3 增加Buffer大小, 2.2.4 关闭副本 2.2.5 禁用swap 2…...

学习Boost一:学习方法和学习目的
学习目的 Boost 的学习目的: 因为从知乎和CSND上根据了解内容来看,Boost作为一个历史悠久的开源库,已经脱离了一个单纯的库的概念了,他因庞大的涉及面应当被称之为库集。 并且,因为boost库优秀的试用反馈和开发人员的…...

c语言每日一练(1)
前言: 每日一练系列,每一期都包含5道选择题,2道编程题,博主会尽可能详细地进行讲解,令初学者也能听的清晰。每日一练系列会持续更新,暑假时三天之内必有一更,到了开学之后,将看学业情…...

iOS开发-CocoaLumberjack日志库实现Logger日志功能
iOS开发-Logger日志功能实现 在iOS开发中,常用CocoaLumberjack来作为日志功能实现的日志框架 一、CocoaLumberjack是什么? CocoaLumberjack 是 支持 iOS 和 Mac 平台的日志框架,使用简单,功能强大且不失灵活,它的主…...
深度学习(34)—— StarGAN(2)
深度学习(34)—— StarGAN(2) 完整项目在这里:欢迎造访 文章目录 深度学习(34)—— StarGAN(2)1. build model(1)generator(2&#…...

use lua
-- basic.lua print("hello ".."world") local a 1 --only this file can see b 2 -- global see -- not declare vaiable all asign to nil print(fuck) -- 字符串可以"" , ,[[]] -- 一些数值运算支持,进制数,科学数&a…...
网络——初识网络
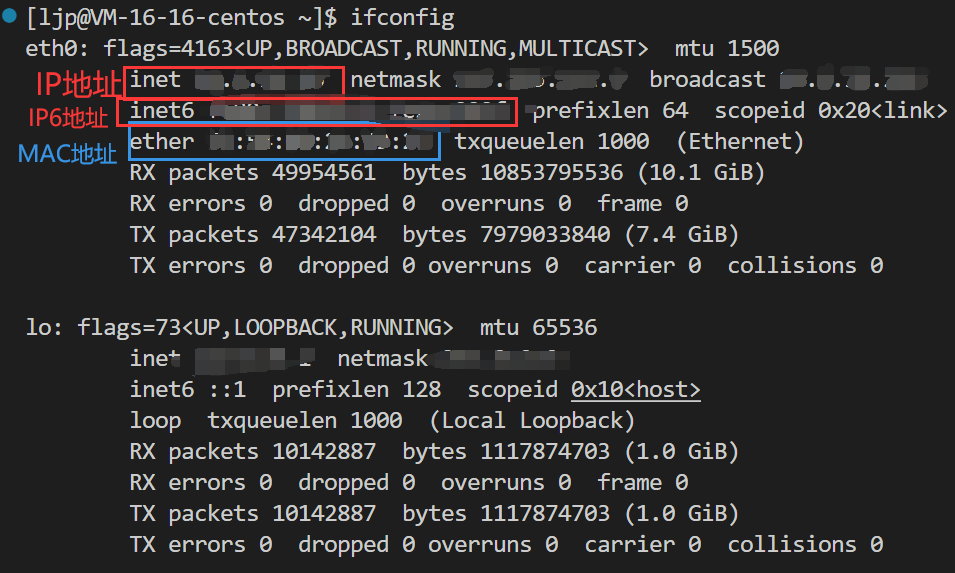
网络基础 文章目录 网络基础计算机网络产生的背景认识网络协议网络协议初识协议分层OSI七层模型TCP/IP四层模型网络传输基本流程协议报头 认识IP地址认识MAC地址ifconfig查看主机地址ifconfig查看主机地址 计算机网络产生的背景 独立模式:计算机之间相互独立 早期的…...

调试技巧(2)
6. 如何写出好(易于调试)的代码 6.1 优秀的代码: 代码运行正常bug很少效率高可读性高可维护性高注释清晰文档齐全 常见的coding技巧: 使用assert尽量使用const养成良好的编码风格添加必要的注释避免编码的陷阱。 这里讲一下assert…...

告别繁琐点击:3大功能助你实现智能文档获取与自动化下载
告别繁琐点击:3大功能助你实现智能文档获取与自动化下载 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是为了…...

macOS运行Windows程序的终极指南:Whisky完全攻略
macOS运行Windows程序的终极指南:Whisky完全攻略 【免费下载链接】Whisky A modern Wine wrapper for macOS built with SwiftUI 项目地址: https://gitcode.com/gh_mirrors/wh/Whisky 想在Mac上无缝运行Windows软件和游戏,但又不想安装虚拟机或双…...
上安装 WinQSB——无需虚拟机)
Windows 10/11(64位)上安装 WinQSB——无需虚拟机
以下是在 Windows 10/11(64位) 上安装 WinQSB 的完整步骤,无需虚拟机,并安装在 D 盘。原理说明 WinQSB 是一个 16位 Windows 程序,64位 Windows 原生不支持运行它。解决方案是使用 winevdm(otvdm࿰…...

环保设备系统控制柜制造:从工艺联动到稳定达标的完整解析
一、什么是环保设备系统控制柜制造?环保设备系统控制柜制造,是指根据废气治理、污水处理、粉尘治理、喷淋塔、活性炭吸附、催化燃烧、RTO/RCO、除尘器、风机水泵、加药系统、污泥处理、在线监测和环保设备联动控制等实际需求,对PLC、变频器、…...

深度解析猫抓Cat-Catch:从浏览器资源嗅探到流媒体处理的技术架构演进
深度解析猫抓Cat-Catch:从浏览器资源嗅探到流媒体处理的技术架构演进 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓Cat-Catch作为…...

抖音批量下载终极指南:免费高效获取视频、图集、合集和音乐
抖音批量下载终极指南:免费高效获取视频、图集、合集和音乐 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback …...
)
华为设备上MQC实战:用流策略搞定网络流量路径规划(含ACL+OSPF联动)
华为设备MQC高级应用:动态路由环境下的智能流量路径规划 在复杂的企业网络环境中,流量路径规划往往成为网络工程师面临的核心挑战之一。当网络中存在多条等价路径时,传统的路由协议(如OSPF)会基于简单的哈希算法进行负…...

macOS完整安装器下载工具终极指南:轻松获取Big Sur系统安装包
macOS完整安装器下载工具终极指南:轻松获取Big Sur系统安装包 【免费下载链接】DownloadFullInstaller macOS application written in SwiftUI that downloads installer pkgs for the Install macOS Big Sur application. 项目地址: https://gitcode.com/gh_mirr…...

ZVM嵌入式实时虚拟机:在ARMv8-A上实现Linux与Zephyr的混合关键性系统
1. 项目概述与核心价值如果你正在从事嵌入式系统开发,尤其是涉及汽车电子、工业控制或5G通信设备这类对实时性和可靠性要求极高的领域,那么你肯定对“既要、又要、还要”的困境深有体会。我们常常需要在同一块硬件上,既要运行一个功能丰富、生…...
)
STM32CubeIDE新手避坑:如何正确添加自定义文件夹(以OLED驱动为例)
STM32CubeIDE工程管理实战:从零构建模块化OLED驱动框架 第一次在STM32CubeIDE中引入第三方驱动时,90%的开发者都会在头文件引用环节卡壳。那些看似简单的"../BSP/oled.h"路径背后,隐藏着嵌入式工程管理的核心逻辑。本文将用真实的O…...