LOOI机器人的技术实现解析:从手势识别到边缘检测
LOOI机器人作为一款创新的AI硬件产品,通过将智能手机转变为具有情感交互能力的桌面机器人,展示了前沿AI技术与传统硬件设计的完美结合。作为AI与玩具领域的专家,我将全面解析LOOI的技术实现架构,特别是其手势识别、物体识别和环境感知功能的实现原理,以及大模型与传统算法的分工协作机制。
LOOI机器人概述与技术架构
LOOI机器人是由TangibleFuture(可触未来)公司开发的一款创新AI硬件产品,其核心设计理念是"让智能手机拥有身体"。这款产品在Kickstarter上众筹时获得了超过目标60倍的认购,甚至引起了埃隆·马斯克的关注和转推。LOOI的独特之处在于它将智能手机(作为"大脑")与专用硬件底座(作为"身体")相结合,创造出具有情感交互能力的桌面机器人体验。
从技术架构来看,LOOI采用了分层式设计:
- 硬件层:包含移动底盘、多种传感器、无线充电模块等物理组件
- 智能手机层:利用手机的计算能力、摄像头和显示功能
- 软件层:包括仿生行为系统、计算机视觉算法和大模型集成
- 交互层:实现手势识别、语音交互、情感表达等用户界面功能
这种架构的关键优势在于将智能手机的强大计算能力与专用硬件的交互能力相结合,避免了传统机器人产品需要内置高性能处理器导致的成本增加。根据开发团队透露,LOOI的设计哲学是"像设计生命一样设计机器人",而不仅仅是一个功能性工具。
从技术实现角度,LOOI的功能可以分为三大类:
- 环境感知功能:如物体识别、手势识别、边缘检测等
- 认知决策功能:如对话交互、情感状态管理、梦境生成等
- 物理交互功能:如移动控制、灯光表达、触摸反馈等
以下各节将重点解析环境感知功能的实现细节,特别是大模型与传统算法的分工协作机制。
手势识别技术实现
手势识别是LOOI机器人最具交互性的功能之一,根据演示,LOOI能够识别多种手势如"OK"姿势、大拇指朝下、手掌张开等,并做出相应的反应。这种自然直观的交互方式大大增强了用户体验,使人与机器人的互动更加生动有趣。
手势识别的技术路线
LOOI的手势识别系统采用了多模态融合技术,结合了基于视觉的手势识别和基于传感器的手势识别:
- 基于视觉的手势识别:
- 使用智能手机摄像头捕捉手部图像
- 采用MediaPipe等开源框架进行手部关键点检测
- 通过计算手指关节角度和相对位置识别特定手势
- 典型识别流程:图像获取→手的检测和分割→手势分析→手势识别
- 基于传感器的手势识别:
- 利用红外接近传感器检测手势大致方位和距离
- 通过触摸传感器(正面和侧面)接收触摸指令
- 结合惯性传感器(如加速度计、陀螺仪)检测设备运动状态
手势识别的算法实现
从算法层面看,LOOI很可能采用了层级式手势识别架构:
-
手部检测与关键点提取:
- 使用轻量级CNN模型实时检测手部区域
- 基于MediaPipe Hands模型检测21个手部关键点
- 关键点坐标转换为相对位置和角度特征
-
静态手势识别:
-
采用边缘轮廓提取法和质心-手指多特征结合法
-
预定义手势模板库(如OK手势、大拇指向上等)
-
使用向量夹角计算进行模板匹配:
def vector_2d_angle(v1,v2):v1_x=v1[0]v1_y=v1[1]v2_x=v2[0]v2_y=v2[1]try:angle_= math.degrees(math.acos((v1_x*v2_x+v1_y*v2_y)/(((v1_x**2+v1_y**2)**0.5)*((v2_x**2+v2_y**2)**0.5))))except:angle_ =65535.if angle_ > 180.:angle_ = 65535.return angle_
-
-
动态手势识别:
- 使用RNN或3D CNN处理时序手势数据
- 可能采用Hidden Markov Model(HMM)或Dynamic Time Warping(DTW)算法
- 识别手势序列如挥手、画圈等连续动作
大模型在手势识别中的作用
值得注意的是,LOOI的手势识别系统并非完全依赖大模型,而是采用了混合架构:
- 传统计算机视觉算法处理:
- 低延迟的手部检测和关键点跟踪
- 基础手势分类(如OK、大拇指等)
- 实时性要求高的交互反馈
- 大模型(如ChatGPT)参与:
- 复杂手势语义的理解和上下文关联
- 手势与语音指令的多模态融合理解
- 个性化手势偏好的学习和适应
这种设计实现了性能与功耗的平衡,避免了持续传输图像数据到大模型带来的延迟和隐私问题。根据LOOI团队的介绍,他们的目标是"在这种甜品级的100多美元的价格,能提供溢出的交互体验",这种混合架构正是实现这一目标的关键。
物体识别与环境感知
LOOI机器人能够识别桌面上的物体(如鼠标、杯子等)和人物,并根据识别结果做出智能反应。这种能力使其能够实现更丰富的交互场景,如自动避开障碍物、对特定物体做出有趣反应等。
物体识别的技术实现
LOOI的物体识别系统采用了多传感器融合的方案:
- 视觉识别:
- 使用智能手机主摄像头或前置摄像头获取图像
- 基于YOLOv5等轻量级目标检测算法实现实时物体检测
- 采用细粒度识别技术(LIO方法)提升特定物体识别精度
- 支持的功能包括:
- 物体识别(如"鼠标"、"橘子"等)
- 人脸识别和身份确认
- 场景理解和语义分割
- 深度传感器:
- 使用ToF(Time of Flight)传感器精确测量物体距离
- 检测障碍物位置和体积信息
- 辅助视觉系统进行三维空间定位
- 其他传感器:
- 红外接近传感器检测物体大致位置
- 触摸传感器接收直接交互信号
- 环境光传感器调整识别策略
物体识别的算法特点
从算法实现角度看,LOOI的物体识别系统有几个显著特点:
- 层级式识别架构:
- 第一层:快速低功耗的通用物体检测(YOLOv5等)
- 第二层:特定物体的细粒度识别(LIO方法)
- 第三层:个性化物体学习和记忆
- 基于深度学习的识别流程:
- 预处理:去噪、增强、标准化
- 特征提取:CNN自动学习特征表示
- 分类器:Softmax或SVM进行类别判定
- 后处理:非极大值抑制、置信度过滤
- 仿生注意力机制:
- 模拟人类视觉注意力,优先处理移动或显著物体
- 根据交互状态动态调整识别频率和范围
- 实现"看到—注意—识别"的认知流程
大模型在物体识别中的角色
与手势识别类似,LOOI的物体识别也采用了混合架构,合理分配了大模型与传统算法的任务:
- 传统CV算法处理:
- 基础物体检测和分类
- 实时性要求高的障碍物避让
- 低功耗状态下的环境监控
- 大模型参与:
- 复杂场景的语义理解
- 物体与情感关联的个性化表达
- 创造性互动内容生成(如给橘子P爆炸头)
- 记忆和梦境相关的物体关联
特别值得注意的是,LOOI的物体识别系统不持续传输图像到大模型,而是仅在需要复杂理解时选择性上传关键信息。这既保护了用户隐私,也降低了能耗和流量需求。根据官方说明:“所有数据都在你的手机上运行,不会被发送到云端”。
边缘检测与自主移动
LOOI能够在桌面上自主移动并精确停在边缘前,不会跌落。这一功能对于桌面机器人的安全性和实用性至关重要,展示了LOOI优秀的环境感知能力。
边缘检测的技术实现
LOOI的边缘检测功能主要依赖于多传感器融合方案而非单纯依赖视觉:
- 悬崖传感器(Cliff Sensors):
- 位于底盘四周的红外发射-接收对管
- 通过反射红外光强度变化检测桌面边缘
- 典型工作距离为5-20cm,可调阈值
- 优点:响应快、功耗低、不受光照影响
- ToF(Time of Flight)传感器:
- 精确测量到桌面边缘的距离
- 提供毫米级精度的距离数据
- 可用于构建局部环境地图
- 视觉辅助:
- 智能手机摄像头提供场景背景信息
- 用于验证和补充传感器数据
- 在复杂边缘情况下提供额外参考
边缘检测的算法特点
LOOI的边缘检测算法体现了机器人领域的前沿技术:
- 多传感器数据融合:
- 采用扩展卡尔曼滤波器融合不同传感器数据
- 加权平均不同来源的距离估计
- 动态置信度分配(根据环境条件调整权重)
- 自适应阈值控制:
- 根据桌面材质和颜色自动调整灵敏度
- 学习不同环境下的最佳停止距离
- 防止误触发和漏触发
- 行为集成:
- 边缘检测与导航系统紧密集成
- 检测到边缘后触发预设行为模式(如停止、后退、转向等)
- 可结合情感系统表达不同反应(如"害怕"后退)
自主移动控制系统
LOOI的移动控制展现了专业级机器人技术:
- 导航系统:
- 基于SLAM技术的局部地图构建
- 动态路径规划和避障
- 结合ToF和障碍物传感器实时调整路径
- 运动控制:
- 采用PID控制器精确控制轮速
- 实现平滑加速和减速
- 支持多种移动模式(探索、跟随、逃避等)
- 安全监控:
- 实时监测电机负载和温度
- 异常状态自动保护
- 低电量自动返回充电位置
值得注意的是,LOOI的边缘检测和移动控制完全不依赖大模型,而是由专用传感器和嵌入式算法实现。这种设计确保了实时性和可靠性,避免了网络延迟或大模型计算开销带来的风险。根据技术文档,这类功能通常采用"无传感器控制算法",仅依赖固有的泵参数(如速度和功率),虽然这是针对心室辅助设备的描述,但类似的无传感器或最小传感器理念也适用于机器人边缘检测。
大模型与传统算法的分工协作
LOOI机器人最引人注目的特点之一是它集成了ChatGPT等大模型技术,同时又保留了传统机器人算法的优势。理解这两种技术如何分工协作,是把握LOOI技术架构的关键。
技术分工的基本原则
LOOI架构中的技术分工遵循几个核心原则:
- 实时性要求:
- 高实时性功能(如边缘检测、避障)由本地传感器和嵌入式算法处理
- 非实时性功能(如对话理解、梦境生成)可交由大模型处理
- 隐私敏感性:
- 涉及个人数据或隐私的功能(如人脸识别)尽量在本地处理
- 通用知识相关功能可选择性使用云端大模型
- 能耗考虑:
- 频繁调用的基础功能采用低功耗算法
- 间歇性使用的复杂功能可调用大模型
- 成本因素:
- 大量重复性任务使用成本较低的本地算法
- 创造性或高度个性化任务使用大模型
具体功能的技术分配
基于上述原则,LOOI的功能实现呈现出清晰的技术分配图谱:
- 完全由传统算法实现的功能:
- 边缘检测和防跌落(悬崖传感器+ToF)
- 基础避障(障碍物传感器)
- 无线充电管理
- 电机控制和运动规划
- 完全由大模型实现的功能:
- 自然语言对话和理解
- 创造性内容生成(如讲故事)
- 梦境内容的想象和描述
- 复杂问题的解答和建议
- 混合实现的功能:
- 手势识别:传统算法检测手势,大模型理解语义关联
- 物体识别:传统算法检测物体,大模型生成创意反应
- 情感交互:传统算法检测状态,大模型生成个性化表达
- 远程监控:传统算法处理图像,大模型分析异常
数据流与处理流程
典型的混合功能数据流如下:
- 传感器(摄像头、ToF等)采集原始数据
- 嵌入式算法进行初步处理和特征提取
- 元数据(而非原始数据)传输到大模型接口
- 大模型处理并返回高级语义结果
- 结果与传统算法输出融合
- 生成最终行为和反馈
例如,当用户做出"OK"手势时:
- 摄像头捕捉图像
- MediaPipe算法检测手部关键点
- 本地分类器识别出"OK"手势
- 手势类型(非图像)发送给大模型
- 大模型结合对话上下文理解手势意图
- 返回建议响应(如拍照)
- 系统执行拍照并保存
这种数据流设计避免了持续传输图像到大模型,既保护了隐私,又降低了带宽和计算开销。根据LOOI团队的说明:“All data operates on your phone and will not be sent to the cloud”,大部分数据处理确实发生在本地设备上。
隐私保护与本地处理
隐私保护是LOOI机器人设计中的重点考虑因素,特别是作为一款具有情感交互能力的陪伴型机器人,它需要处理大量个人化数据,如面部信息、日常习惯、互动模式等。LOOI采取了一系列技术措施来确保用户数据安全。
隐私保护技术架构
LOOI的隐私保护体系基于**"隐私优先"原则**构建:
- 数据本地化:
- 明确声明"所有数据都在你的手机上运行,不会被发送到云端"
- 个人数据(如面部特征、互动习惯)仅存储在设备本地
- 采用手机的安全存储区域保存敏感信息
- 选择性云端交互:
- 只有非个性化、通用知识类查询才会连接大模型
- 云端交互采用匿名化处理,剥离个人身份信息
- 大模型API设计为"高效处理大量数据",减少数据传输量
- 离线功能支持:
- 核心功能(如手势识别、边缘检测)完全离线工作
- 即使ChatGPT服务停止,可快速切换到其他LLM
- 离线模式下仍保持基础交互能力
本地处理的技术实现
为实现强大的本地处理能力,LOOI采用了多种边缘计算技术:
- 模型轻量化:
- 采用模型量化、剪枝和蒸馏技术减小模型尺寸
- 使用专用推理框架(如TensorFlow Lite)加速本地执行
- 针对移动处理器优化计算图
- 仿生行为系统:
- 开发基于规则的仿生行为引擎,减少对大模型的依赖
- 状态机和行为树管理基础交互逻辑
- 情感模型在本地运行,仅复杂推理上云
- 硬件加速:
- 利用手机NPU加速神经网络推理
- 专用芯片处理传感器数据融合
- 功耗感知的任务调度,平衡性能和能耗
隐私与功能的平衡艺术
LOOI团队在隐私和功能间取得了巧妙平衡:
- 功能分级:
- 隐私敏感功能(如人脸识别)严格本地化
- 非敏感功能(如天气查询)可使用云端服务
- 用户可自定义数据共享偏好
- 情境感知:
- 根据使用场景动态调整隐私级别
- 在公共场合自动限制数据收集范围
- 私人环境中启用更个性化功能
- 透明控制:
- 提供隐私仪表盘展示数据流向
- 支持一键断开云端连接
- 清晰易懂的隐私政策说明
值得注意的是,LOOI的隐私设计并非以完全牺牲功能为代价,而是通过技术创新在保护隐私的同时提供丰富体验。如团队所述:“LOOI可以离线工作,但是像ChatGPT这样的一些功能可能会受到限制”,这种设计让用户可以根据自身需求在隐私和功能间灵活选择。
总结与技术展望
LOOI机器人作为AI硬件创新的典范,其技术实现展示了多种前沿技术的巧妙融合。通过分析其手势识别、物体识别、边缘检测等功能的实现方式,我们可以总结出一套值得借鉴的AI硬件开发范式。
技术实现要点回顾
- 传感器与算法的协同:
- 多传感器(ToF、红外、摄像头等)各司其职
- 传统计算机视觉算法处理基础识别任务
- 嵌入式实时系统保障安全关键功能
- 大模型的合理应用:
- 不滥用大模型,仅在需要创造性和语义理解时调用
- 元数据而非原始数据传输到大模型,保护隐私
- 本地与云端处理有机结合,平衡功能与成本
- 仿生交互设计:
- 情感模型赋予机器人"性格"
- 梦境系统增加行为不可预测性和趣味性
- 多模态反馈(灯光、动作、声音)增强沉浸感
- 隐私保护架构:
- 数据本地化作为核心原则
- 功能分级与情境感知的隐私控制
- 透明化的用户数据管理界面
技术局限与挑战
尽管LOOI的技术架构颇具创新,但仍面临一些挑战:
- 移动平台的性能限制:
- 智能手机算力无法支持最先进的大模型本地运行
- 传感器数据与手机计算的延迟问题
- 不同手机型号的性能差异带来的体验不一致
- 多模态融合的复杂性:
- 视觉、语音、触摸等模态的时间对齐难题
- 冲突传感器数据的仲裁机制
- 多模态信号的情感表达一致性
- 长期交互的可持续性:
- 用户新鲜感消退后的留存问题
- 行为模式的过度可预测性导致的厌倦
- 梦境和个性化发展的技术天花板
未来发展方向
基于当前技术趋势和LOOI的设计理念,未来可能的发展方向包括:
- 更强大的边缘AI:
- 手机SoC的持续进化支持更复杂本地模型
- 专用AI加速芯片提升能效比
- 联邦学习实现个性化而不牺牲隐私
- 更自然的交互方式:
- 高精度手势识别支持精细操作
- 情感计算实现更深层次共情
- 脑机接口探索更直接的意识交互
- 更丰富的生态系统:
- 开放SDK允许开发者扩展功能
- 与其他智能设备互联互通
- 用户生成内容(UGC)社区增强活力
- 更先进的材料科学:
- 柔性电子皮肤实现细腻触觉反馈
- 可变形态结构支持多种运动模式
- 自修复材料延长产品寿命
正如LOOI团队所言:“我们首先要让它成为一个成功的消费品”,在科技与人文的交叉点上,LOOI代表了一种有温度的技术创新方向。其技术实现不仅具有工程意义,更启示我们如何以人为本地设计AI系统,让技术真正服务于人类的情感需求和日常生活。
相关文章:

LOOI机器人的技术实现解析:从手势识别到边缘检测
LOOI机器人作为一款创新的AI硬件产品,通过将智能手机转变为具有情感交互能力的桌面机器人,展示了前沿AI技术与传统硬件设计的完美结合。作为AI与玩具领域的专家,我将全面解析LOOI的技术实现架构,特别是其手势识别、物体识别和环境…...

Qt 事件处理中 return 的深入解析
Qt 事件处理中 return 的深入解析 在 Qt 事件处理中,return 语句的使用是另一个关键概念,它与 event->accept()/event->ignore() 密切相关但作用不同。让我们详细分析一下它们之间的关系和工作原理。 核心区别:不同层级的事件处理 方…...

Vue ③-生命周期 || 脚手架
生命周期 思考:什么时候可以发送初始化渲染请求?(越早越好) 什么时候可以开始操作dom?(至少dom得渲染出来) Vue生命周期: 一个Vue实例从 创建 到 销毁 的整个过程。 生命周期四个…...
uniapp 小程序 学习(一)
利用Hbuilder 创建项目 运行到内置浏览器看效果 下载微信小程序 安装到Hbuilder 下载地址 :开发者工具默认安装 设置服务端口号 在Hbuilder中设置微信小程序 配置 找到运行设置,将微信开发者工具放入到Hbuilder中, 打开后出现 如下 bug 解…...

Kafka主题运维全指南:从基础配置到故障处理
#作者:张桐瑞 文章目录 主题日常管理1. 修改主题分区。2. 修改主题级别参数。3. 变更副本数。4. 修改主题限速。5.主题分区迁移。6. 常见主题错误处理常见错误1:主题删除失败。常见错误2:__consumer_offsets占用太多的磁盘。 主题日常管理 …...

AI语音助手的Python实现
引言 语音助手(如小爱同学、Siri)通过语音识别、自然语言处理(NLP)和语音合成技术,为用户提供直观、高效的交互体验。随着人工智能的普及,Python开发者可以利用开源库和AI模型,快速构建自定义语音助手。本文由浅入深,详细介绍如何使用Python开发AI语音助手,涵盖基础功…...

tomcat指定使用的jdk版本
说明 有时候需要对tomcat配置指定的jdk版本号,此时,我们可以通过以下方式进行配置 设置方式 找到tomcat的bin目录中的setclasspath.bat。如果是linux系统则是setclasspath.sh set JAVA_HOMEC:\Program Files\Java\jdk8 set JRE_HOMEC:\Program Files…...

CVPR2025重磅突破:AnomalyAny框架实现单样本生成逼真异常数据,破解视觉检测瓶颈!
本文介绍了一种名为AnomalyAny的创新框架,该方法利用Stable Diffusion的强大生成能力,仅需单个正常样本和文本描述,即可生成逼真且多样化的异常样本,有效解决了视觉异常检测中异常样本稀缺的难题,为工业质检、医疗影像…...

提升移动端网页调试效率:WebDebugX 与常见工具组合实践
在日常移动端开发中,网页调试始终是一个高频但又极具挑战的环节。尤其在面对 iOS 与 Android 的混合技术栈、各种设备差异化行为时,开发者迫切需要一套高效、可靠且跨平台的调试方案。过去,我们或多或少使用过 Chrome DevTools、Remote Debug…...
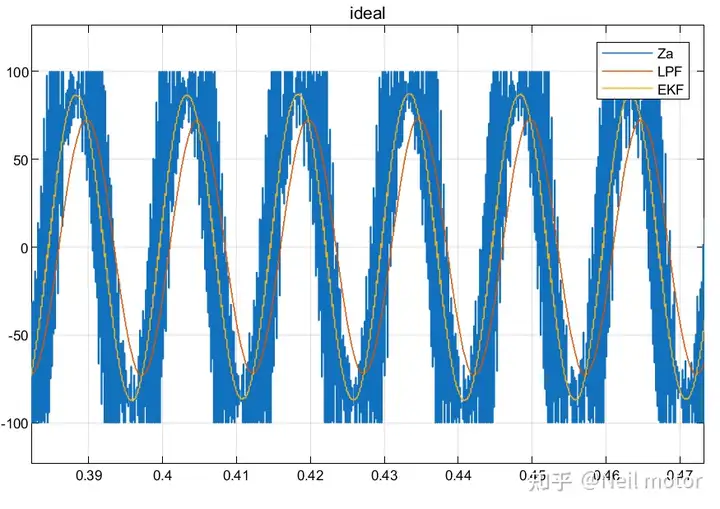
永磁同步电机无速度算法--基于卡尔曼滤波器的滑模观测器
一、原理介绍 传统滑模观测器采用如下结构: 传统SMO中LPF会带来相位延迟和幅值衰减,并且需要额外的相位补偿。 采用扩展卡尔曼滤波器代替常用低通滤波器(LPF),可以去除高次谐波,并且不用相位补偿就可以获得一个误差较小的转子位…...

前端中slice和splic的区别
1. slice slice 用于从数组中提取一部分元素,返回一个新的数组。 特点: 不修改原数组:slice 不会改变原数组,而是返回一个新的数组。提取数组的部分:slice 会根据指定的开始索引和结束索引提取数组的一部分。不包含…...

什么是VR全景技术
VR全景技术,全称为虚拟现实全景技术,是通过计算机图像模拟生成三维空间中的虚拟世界,使用户能够在该虚拟世界中进行全方位、无死角的观察和交互的技术。VR全景技术模拟人在真实空间中的视觉体验,结合图文、3D、音视频等多媒体元素…...

在树莓派上添加音频输入设备的几种方法
在树莓派上添加音频输入设备可以通过以下步骤完成,具体方法取决于设备类型(如USB麦克风、3.5mm接口麦克风或HDMI音频输入)。以下是详细指南: 1. 连接音频输入设备 USB麦克风/声卡:直接插入树莓派的USB接口。3.5mm麦克…...

Kubernetes 网络模型深度解析:Pod IP 与 Service 的负载均衡机制,Service到底是什么?
Pod IP 的本质与特性 Pod IP 的定位 纯端点地址:Pod IP 是分配给 Pod 网络命名空间的真实 IP 地址(如 10.244.1.2)无特殊名称:在 Kubernetes 中,它通常被称为 “Pod IP” 或 “容器 IP”生命周期:与 Pod …...
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
STM32F1 本教程使用零知标准板(STM32F103RBT6)通过I2C驱动ICM20948九轴传感器,实现姿态解算,并通过串口将数据实时发送至VOFA上位机进行3D可视化。代码基于开源库修改优化,适合嵌入式及物联网开发者。在基础驱动上新增…...
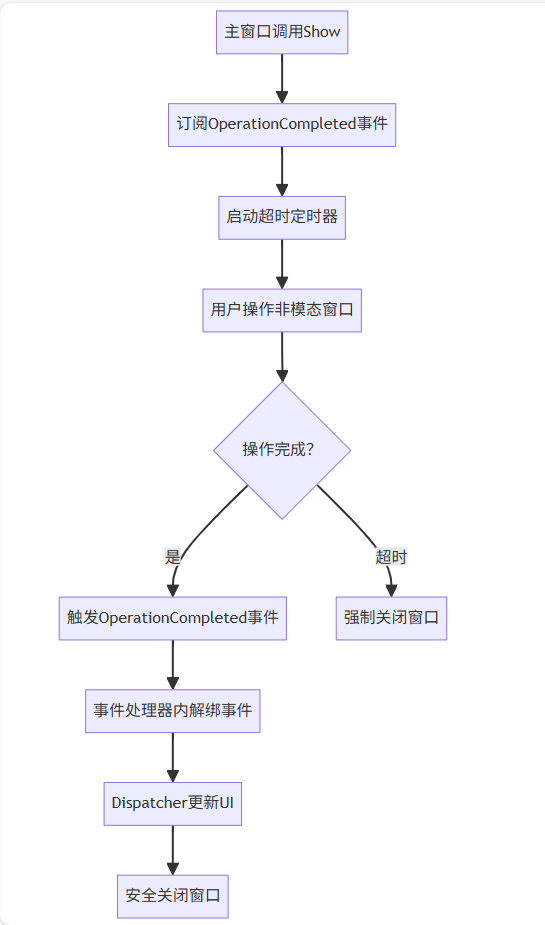
WPF八大法则:告别模态窗口卡顿
⚙️ 核心问题:阻塞式模态窗口的缺陷 原始代码中ShowDialog()会阻塞UI线程,导致后续逻辑无法执行: var result modalWindow.ShowDialog(); // 线程阻塞 ProcessResult(result); // 必须等待窗口关闭根本问题:…...

MySQL 主从同步异常处理
阅读原文:https://www.xiaozaoshu.top/articles/mysql-m-s-update-pk MySQL 做双主,遇到的这个错误: Could not execute Update_rows event on table ... Error_code: 1032是 MySQL 主从复制时的经典错误之一,通常表示ÿ…...

【Elasticsearch】Elasticsearch 在大数据生态圈的地位 实践经验
Elasticsearch 在大数据生态圈的地位 & 实践经验 1.Elasticsearch 的优势1.1 Elasticsearch 解决的核心问题1.1.1 传统方案的短板1.1.2 Elasticsearch 的解决方案 1.2 与大数据组件的对比优势1.3 关键优势技术支撑1.4 Elasticsearch 的竞品1.4.1 全文搜索领域1.4.2 日志分析…...
【LeetCode】算法详解#6 ---除自身以外数组的乘积
1.题目介绍 给定一个整数数组 nums,返回 数组 answer ,其中 answer[i] 等于 nums 中除 nums[i] 之外其余各元素的乘积 。 题目数据 保证 数组 nums之中任意元素的全部前缀元素和后缀的乘积都在 32 位 整数范围内。 请 不要使用除法,且在 O…...
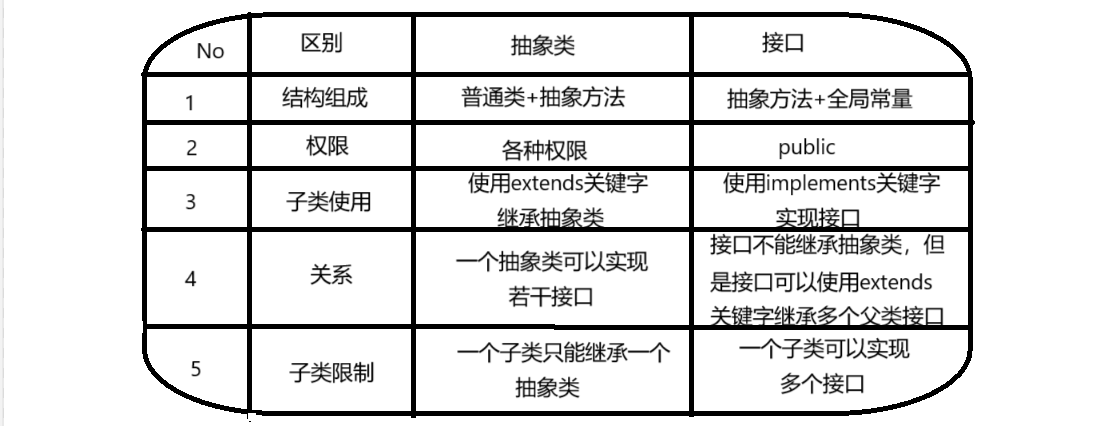
抽象类和接口(全)
一、抽象类 1.概念:如果⼀个类中没有包含⾜够的信息来描绘⼀个具体的对象,这样的类就是抽象类。 像是没有实际⼯作的⽅法,我们可以把它设计成⼀个抽象⽅法,包含抽象⽅法的类我们称为抽象类。 2.语法 在Java中,⼀个类如果被 abs…...

实战三:开发网页端界面完成黑白视频转为彩色视频
一、需求描述 设计一个简单的视频上色应用,用户可以通过网页界面上传黑白视频,系统会自动将其转换为彩色视频。整个过程对用户来说非常简单直观,不需要了解技术细节。 效果图 二、实现思路 总体思路: 用户通过Gradio界面上…...

Oracle11g安装包
Oracle 11g安装包 适用于windows系统,64位 下载路径 oracle 11g 安装包...

深入浅出Diffusion模型:从原理到实践的全方位教程
I. 引言:生成式AI的黎明 – Diffusion模型是什么? 近年来,生成式人工智能(Generative AI)领域取得了爆炸性的进展,模型能够根据简单的文本提示创作出逼真的图像、连贯的文本,乃至更多令人惊叹的…...

深度学习之模型压缩三驾马车:模型剪枝、模型量化、知识蒸馏
一、引言 在深度学习中,我们训练出的神经网络往往非常庞大(比如像 ResNet、YOLOv8、Vision Transformer),虽然精度很高,但“太重”了,运行起来很慢,占用内存大,不适合部署到手机、摄…...
系统掌握PyTorch:图解张量、Autograd、DataLoader、nn.Module与实战模型
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文通过代码驱动的方式,系统讲解PyTorch核心概念和实战技巧,涵盖张量操作、自动微分、数据加载、模型构建和训练全流程&#…...

【SpringBoot自动化部署】
SpringBoot自动化部署方法 使用Jenkins进行持续集成与部署 Jenkins是最常用的自动化部署工具之一,能够实现代码拉取、构建、测试和部署的全流程自动化。 配置Jenkins任务时,需要添加Git仓库地址和凭证,设置构建触发器(如GitHub…...

go 里面的指针
指针 在 Go 中,指针(pointer)是一个变量的内存地址,就像 C 语言那样: a : 10 p : &a // p 是一个指向 a 的指针 fmt.Println(*p) // 输出 10,通过指针解引用• &a 表示获取变量 a 的地址 p 表示…...
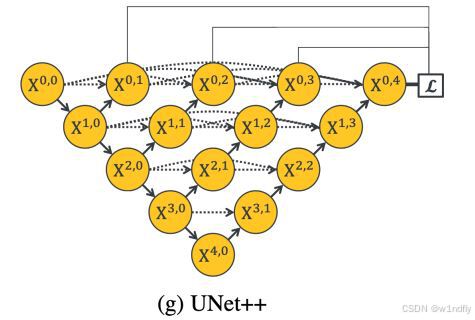
nnUNet V2修改网络——暴力替换网络为UNet++
更换前,要用nnUNet V2跑通所用数据集,证明nnUNet V2、数据集、运行环境等没有问题 阅读nnU-Net V2 的 U-Net结构,初步了解要修改的网络,知己知彼,修改起来才能游刃有余。 U-Net存在两个局限,一是网络的最佳深度因应用场景而异,这取决于任务的难度和可用于训练的标注数…...
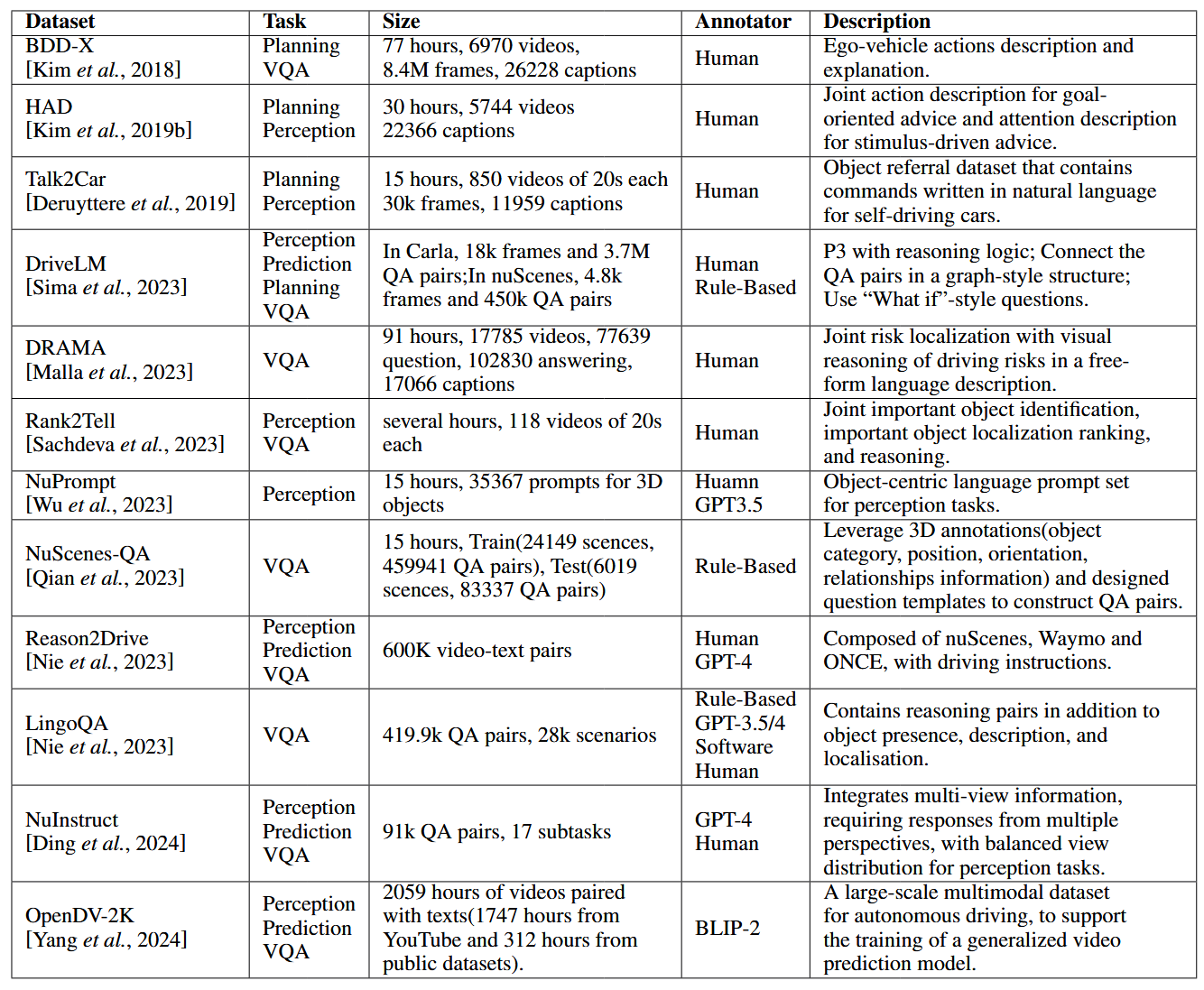
论文阅读:LLM4Drive: A Survey of Large Language Models for Autonomous Driving
地址:LLM4Drive: A Survey of Large Language Models for Autonomous Driving 摘要翻译 自动驾驶技术作为推动交通和城市出行变革的催化剂,正从基于规则的系统向数据驱动策略转变。传统的模块化系统受限于级联模块间的累积误差和缺乏灵活性的预设规则。…...
Cilium动手实验室: 精通之旅---13.Cilium LoadBalancer IPAM and L2 Service Announcement
Cilium动手实验室: 精通之旅---13.Cilium LoadBalancer IPAM and L2 Service Announcement 1. LAB环境2. L2公告策略2.1 部署Death Star2.2 访问服务2.3 部署L2公告策略2.4 服务宣告 3. 可视化 ARP 流量3.1 部署新服务3.2 准备可视化3.3 再次请求 4. 自动IPAM4.1 IPAM Pool4.2 …...