ROS实现机器人移动
开源项目
使用是github上六合机器人工坊的项目。
https://github.com/6-robot/wpr_simulation.git
机器人运动模型
运动模型如下所示:👇
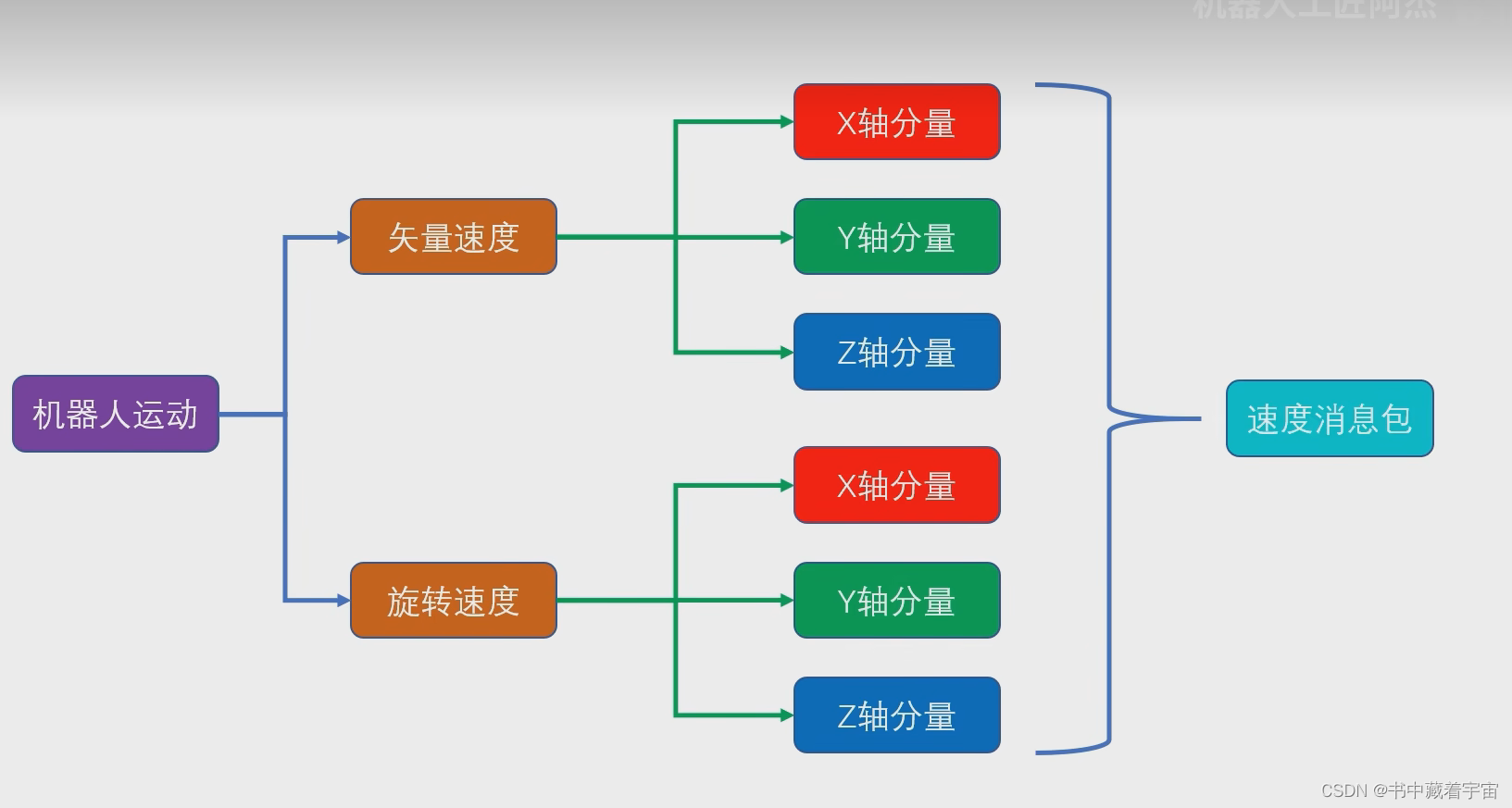
机器人运动的消息包:
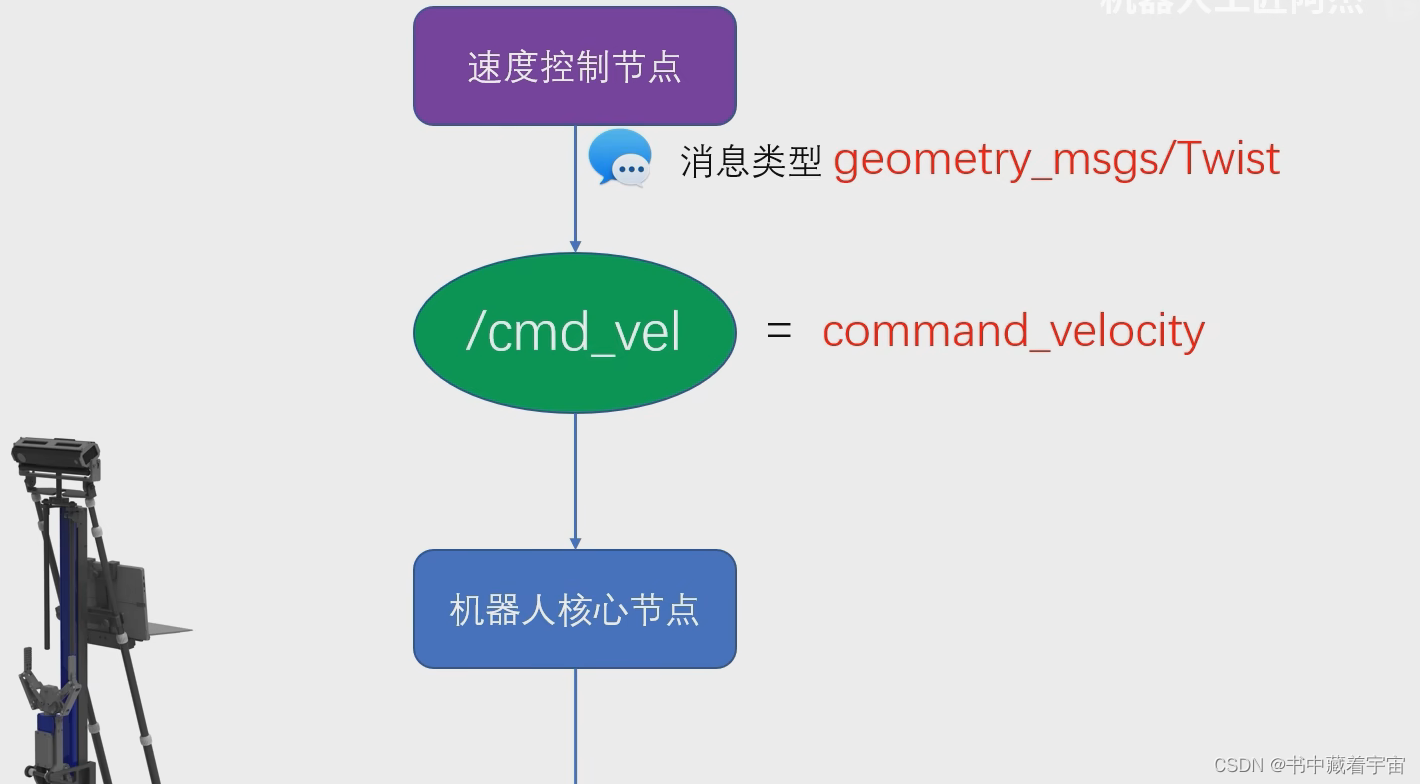
实现思路:👇
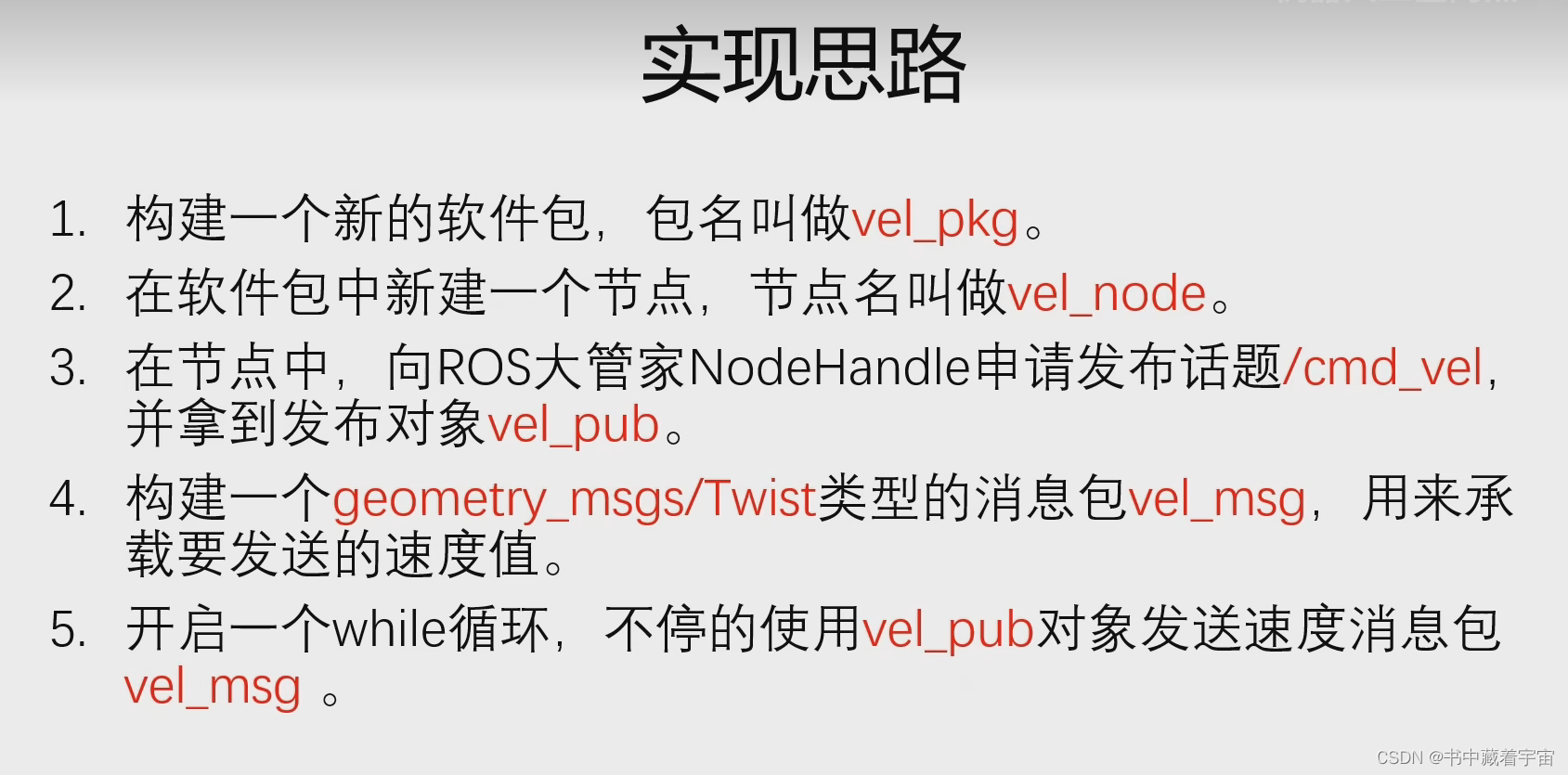
为什么要使用/cmd_vel话题。因为这个是约定俗成的,项目中订阅的就是这个话题,否则无法订阅到主题或者更改项目的订阅者的源码
使用catkin_create_pkg 命令开具工具包,切换到catkin_ws下的src目录
- catkin_create_pkg vel_pkg rospy roscpp geometry_msgs #要依赖于geometry_msgs消息包,之前是依赖于std_msgs标准信息包。
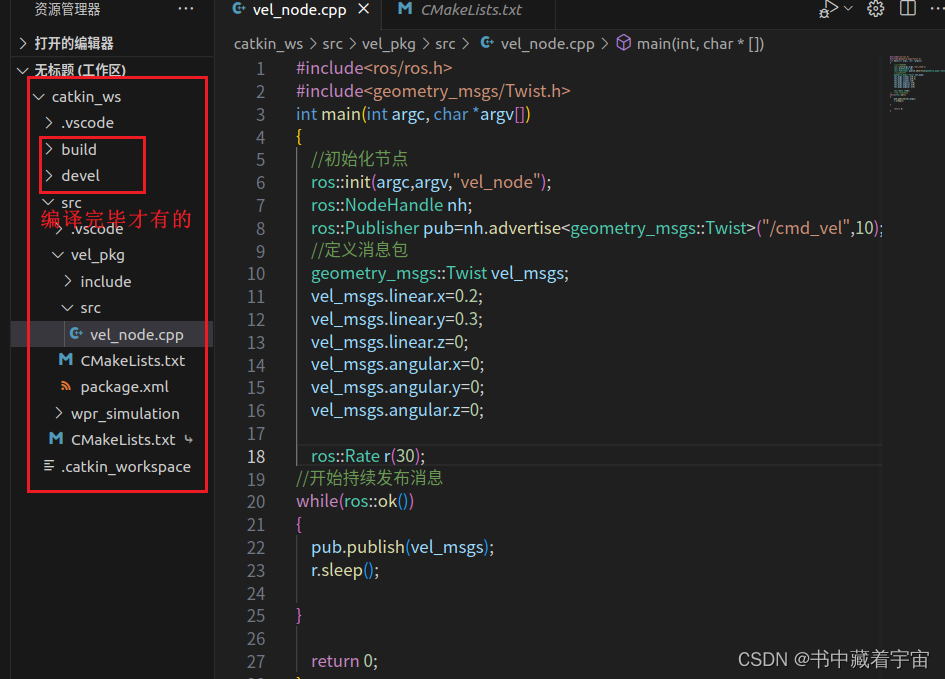
vel_node节点的cpp文件👇
#vel_node.cpp
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>
int main(int argc, char *argv[])
{//初始化节点ros::init(argc,argv,"vel_node");ros::NodeHandle nh;ros::Publisher pub=nh.advertise<geometry_msgs::Twist>("/cmd_vel",10);//定义消息包geometry_msgs::Twist vel_msgs;vel_msgs.linear.x=0.2;vel_msgs.linear.y=0.3;vel_msgs.linear.z=0;vel_msgs.angular.x=0;vel_msgs.angular.y=0;vel_msgs.angular.z=0;ros::Rate r(30);
//开始持续发布消息
while(ros::ok())
{pub.publish(vel_msgs);r.sleep();}return 0;
}备注:Cmakelist.txt文件末尾加上,vscode的编译规则👇
add_executable(vel_node src/vel_node.cpp)
add_dependencies(vel_node KaTeX parse error: Expected '}', got 'EOF' at end of input: {{PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(vel_node
${catkin_LIBRARIES}
)
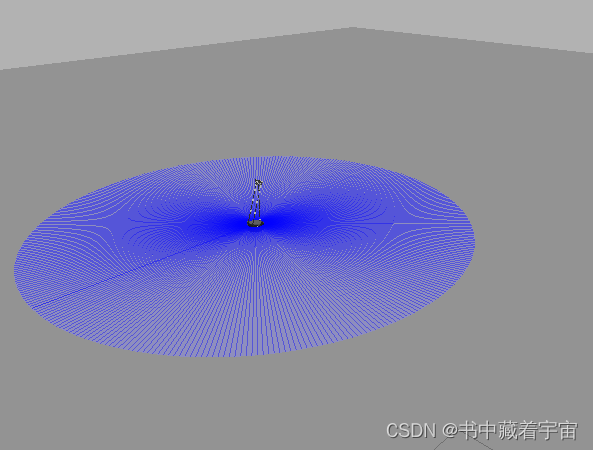
成功运行
额外,对于Rviz使用篇幅较短,就附录在文章尾部。
Rviz简介:
- RViz是ROS的一个可视化工具,用于可视化和调试ROS中的数据。它允许你在三维空间中显示和查看ROS的各种数据,如传感器数据、机器人模型、路径规划结果等。
RViz的功能包括:
-
可视化传感器数据:你可以通过RViz查看激光雷达、摄像头、深度相机等传感器的实时数据。
-
可视化机器人模型:你可以在RViz中加载机器人模型,查看机器人在三维空间中的姿态、关节状态等。
-
可视化路径规划:RViz支持显示机器人的路径规划结果,包括全局路径和局部路径。
-
可视化地图:你可以在RViz中加载地图数据,查看机器人所在的环境。
-
可视化TF坐标变换:RViz可以显示ROS中的TF坐标变换关系,帮助你了解机器人各个部件之间的相对位置。
-
可视化标记:你可以在RViz中添加标记、箭头、文字等来可视化特定的信息。
使用命令:
rviz

如果你想添加模型,可以点击Add按钮

结果展示:

相关文章:
ROS实现机器人移动
开源项目 使用是github上六合机器人工坊的项目。 https://github.com/6-robot/wpr_simulation.git 机器人运动模型 运动模型如下所示:👇 机器人运动的消息包: 实现思路:👇 为什么要使用/cmd_vel话题。因为这…...
Dockerfile构建LNMP镜像
建立工作目录 [rootlocalhost ~]# mkdir lnmp [rootlocalhost ~]# cd lnmp/ 编写Dockerfile文件 [rootlocalhost lnmp]# vim Dockerfile [rootlocalhost lnmp]# ll 总用量 4 -rw-r--r--. 1 root root 774 8月 3 14:54 Dockerfile [rootlocalhost lnmp]# vim Dockerfile #基础…...
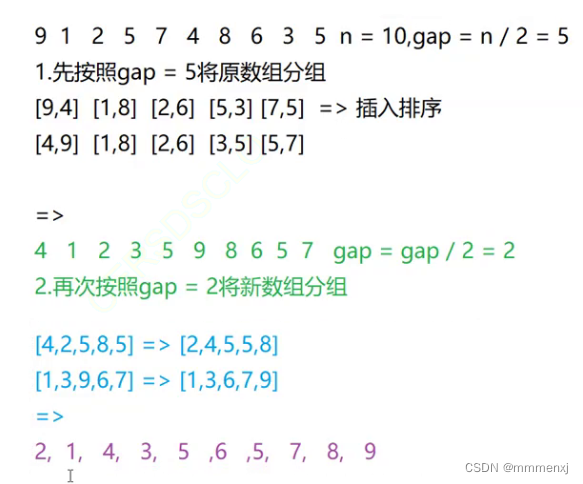
总结七大排序!
排序总览 外部排序:依赖硬盘(外部存储器)进行的排序。对于数据集合的要求特别高,只能在特定场合下使用(比如一个省的高考成绩排序)。包括桶排序,基数排序,计数排序,都是o…...

没有fastjson,rust怎么方便的解析提取复杂json呢?
在 Rust 中解析和提取复杂的 JSON 结构,你可以使用 serde_json 库来处理。 serde_json 提供了一组功能强大的方法来解析和操作 JSON 数据。 下面是一个示例,展示了如何解析和提取复杂的 JSON 结构: use serde_json::{Value, Result}; fn mai…...
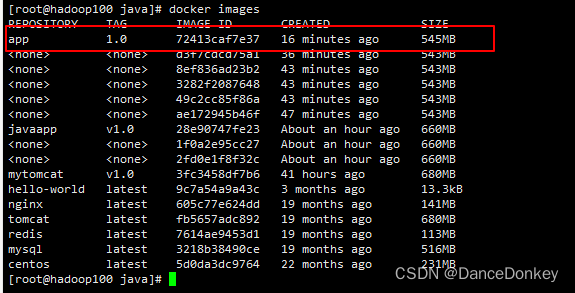
Docker制作SpringBoot镜像
Dcokerfile目录 编写Dockerfile FROM openjdk:8 #发布到网上时只会把jar包和Dockerfile发布上去RUN mkdir -p /opt/javaCOPY app.jar /opt/java/app.jar #地址映射 #CMD ["--server.port8080"] #对外暴露端口(可以任意修改) EXPOSE 15009 #执行命令 #ENTRYPOINT [&q…...
)
力扣:53. 最大子数组和(Python3)
题目: 给你一个整数数组 nums ,请你找出一个具有最大和的连续子数组(子数组最少包含一个元素),返回其最大和。 子数组 是数组中的一个连续部分。 来源:力扣(LeetCode) 链接ÿ…...
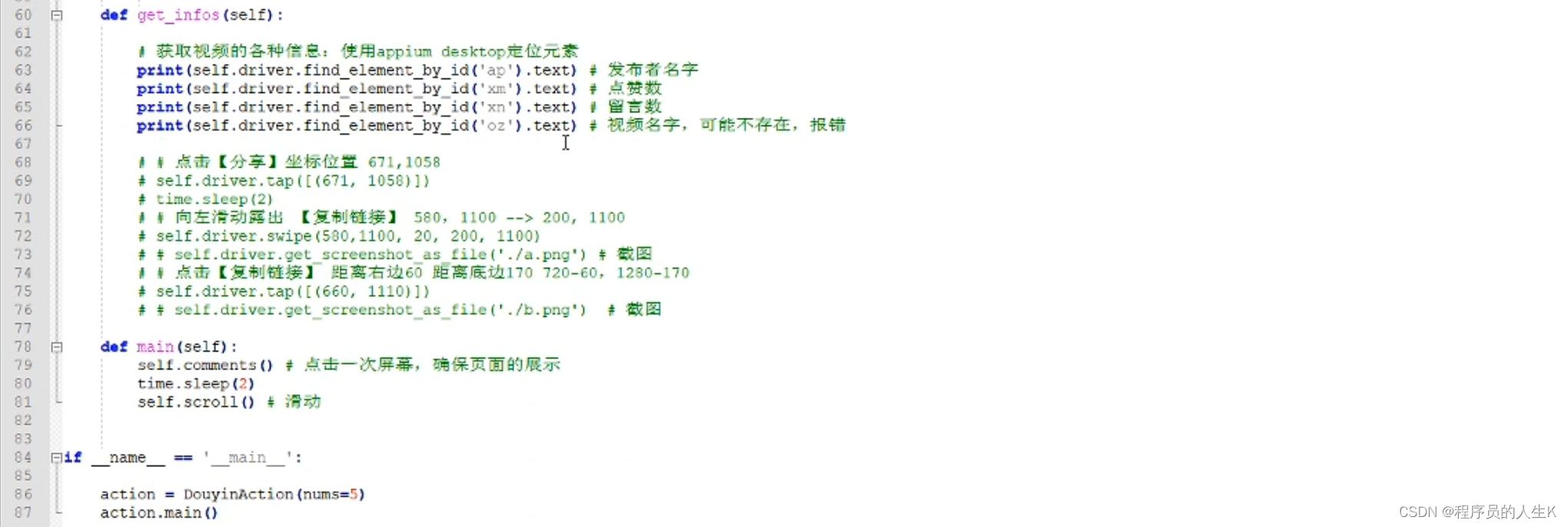
利用appium抓取app中的信息
一、appium简介 二、appium环境安装 三、联调测试环境 四、利用appium自动控制移动设备并提取数据...
数据结构:双向链表的实现(C实现)
个人主页 : 个人主页 个人专栏 : 《数据结构》 《C语言》 文章目录 前言 一、实现思路1.节点的结构(ListNode)2.新节点的创建(BuyListNode)3.头结点的创建(ListCreate)4.双向链表的销毁(ListDestroy)5.双向链表的打印(ListPrint)6.双向链表的尾插(ListPu…...
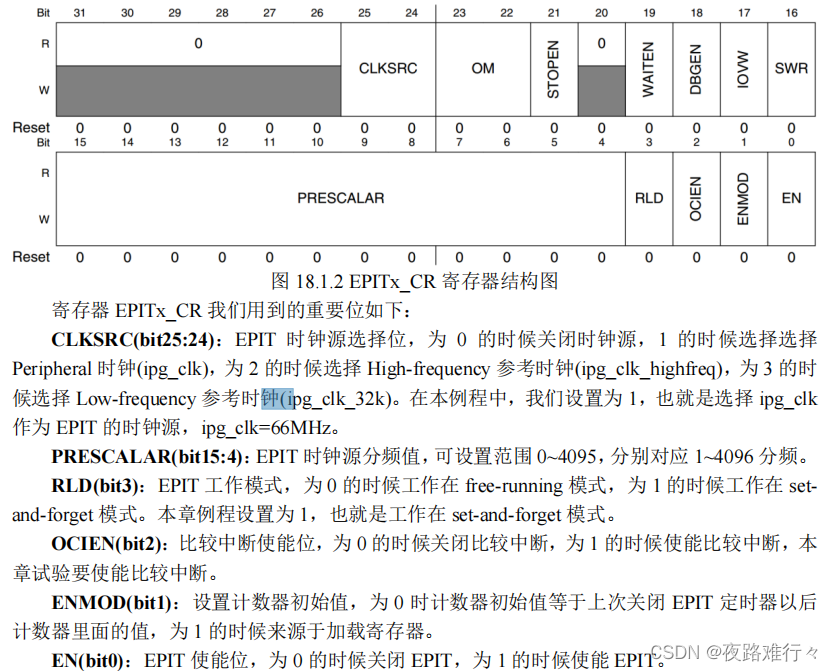
linuxARM裸机学习笔记(4)----GPIO中断以及定时器中断实验
1.中断向量表 这个表里面存放的都是中断向量,中断服务程序的入口地址或存放中断服务程序的首地址成为中断向量。中断向量表是一系列中断服务程序入口地址组成的表,当某个中断触发的时候会自动跳转到中断向量表对应的中断服务程序的入口。 2.NVIC(内嵌向…...

第十二次CCF计算机软件能力认证
第一题:最小差值 给定 n 个数,请找出其中相差(差的绝对值)最小的两个数,输出它们的差值的绝对值。 输入格式 输入第一行包含一个整数 n。 第二行包含 n 个正整数,相邻整数之间使用一个空格分隔。 输出格式 …...
)
ceph pg inconsistent修复(unexpected clone)
问题概述: ceph -s 显示pg 10.17 inconsistent 且命令ceph pg repair 10.17无法修复,/var/log/ceph/cep-osd.3.log报错内容如下: pg 10.17 osd [3,4] 权威副本osd:3 repair 10.17 10:e889b16a:::rbd_data.88033092ad95.00000000…...

供求重构是产业互联网的核心 个体崛起是产业互联网的终点
文章开头提到的网约车市场缘何会出现这样的困境?其中一个很重要的原因在于,建构于互联网模式之下的供求关系业已走到了尽头,仅仅只是依靠撮合和中介,仅仅只是凭借平台和中心开始无法破解供求两端的矛盾和问题。如何解决这一问题&a…...
torchvision.datasets数据加载失败
torchvision.datasets数据加载失败 如何使用torchvision.datasets进行自动下载数据失败,可以使用手动下载数据 Ctrl点击可以进入相关包文件,查找下载地址:https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz 手动下载之后解压&#x…...
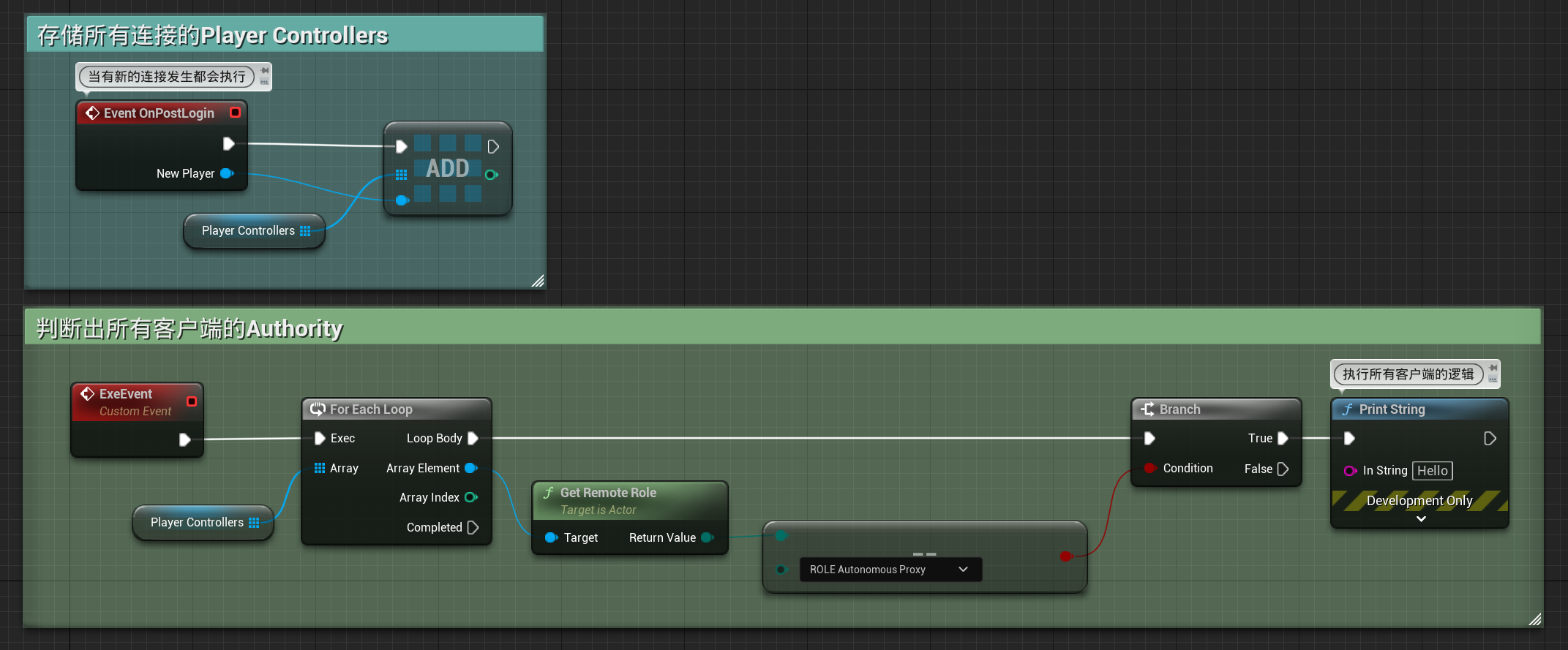
【UEC++学习】UE网络 - Replication、RPC
1. UE网络架构 (1)UE的网络架构是SC(Server - Client)的模式,这种模式的优势:这种模式让所有客户端都在服务器端进行安全验证,这样可以有效的防止客户端上的作弊问题。 (2ÿ…...
C语言案例 按序输出三个整数-02
题目:输入三个整数a,b,c,按从小到大的顺序输出 步骤一:定义程序的目标 编写一个C程序,随机输入三个整数,按照从小到大的顺序输出。 步骤二:程序设计 整个程序由三个模块组成,第一个为scanf输入函数模块&a…...

区块链实验室(16) - FISCO BCOS实验环境
经过多次重复,建立一个FISCO BCOS实验环境。该环境是一个VMWare虚拟机,能够启动FISCO BCOS自创建的4节点区块链,不必下载依赖包即可编译Fisco Bcos目标文件,安装有VsCode1.81版本。 启动4节点的Fisco Bcos区块链 启动控制台 编译…...

Java事件监听机制
这里写目录标题 先进行专栏介绍再插一句 开始喽事件监听机制分析观察者模式观察者模式由以下几个角色组成:观察者模式的工作流程如下:观察者模式的优点包括:观察者模式适用于以下场景:总结 事件监听机制的工作流程如下:…...
记一次ubuntu16误删libc.so.6操作的恢复过程
背景 操作系统:ubuntu16 glibc版本:2.23 修改原因: 经过一系列报错和手工构建之后,vulkansdk成功安装(起码运行./vulkansdu成功),在进行./vulkaninfo进行验证时,报错:…...

MAVLINK—C语言demoWindows版本
mavlink/examples/c/udp_example.c 在学习mavlink时准备学习一下官网的C语言example,发现是unix系统的,打算在Windows系统下尝试,于是将示例修改了一下。 #include <stdio.h> #include <errno.h> #include <string.h> #in…...

区块链实验室(15) - 编译FISCO BCOS的过程监测
首次编译开源项目,一般需要下载很多依赖包,尤其是从github、sourceforge等下载依赖包时,速度很慢,编译进度似乎没有一点反应,似乎陷入死循环,似乎陷入一个没有结果的等待。本文提供一种监测方法,…...
)
遥感图像处理实战:用eCognition多尺度分割搞定地物分类(附样本点与特征提取全流程)
遥感图像智能解译实战:eCognition多尺度分割与地物分类全流程解析 清晨的阳光透过窗帘缝隙洒在桌面上,我打开最新接收的卫星影像——这是一片混合了城市建筑、绿地和农田的复杂区域。作为遥感分析师,我们每天面对的都是这样充满信息量的图像&…...

终极指南:如何在Windows电脑上实现AirPlay 2无线投屏功能
终极指南:如何在Windows电脑上实现AirPlay 2无线投屏功能 【免费下载链接】airplay2-win Airplay2 for windows 项目地址: https://gitcode.com/gh_mirrors/ai/airplay2-win 还在为Windows电脑无法接收iPhone、iPad或Mac的屏幕镜像而烦恼吗?Airpl…...

Cursor AI编程助手扩展包:定制化规则提升代码生成质量与效率
1. 项目概述:一个为 Cursor 编辑器量身定制的 AI 编程助手扩展包如果你和我一样,日常重度依赖 Cursor 这款“AI 驱动的代码编辑器”来提升开发效率,那你肯定不止一次地想过:能不能让 Cursor 更懂我?能不能让它在我写特…...

MDX-M3-Viewer深度解析:浏览器端游戏模型渲染的全新范式
MDX-M3-Viewer深度解析:浏览器端游戏模型渲染的全新范式 【免费下载链接】mdx-m3-viewer A WebGL viewer for MDX and M3 files used by the games Warcraft 3 and Starcraft 2 respectively. 项目地址: https://gitcode.com/gh_mirrors/md/mdx-m3-viewer 在…...

终极指南:FigmaCN中文插件让设计师告别英文障碍
终极指南:FigmaCN中文插件让设计师告别英文障碍 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 还在为Figma的全英文界面而烦恼吗?Figma中文插件FigmaCN正是为你…...

基于改进型PCNN的不规则图像自适应分割算法研究
基于改进型PCNN的不规则图像自适应分割算法研究根据论文中的相关内容,以下是使用不同方法解决图像分割问题并进行改进的研究:冯登超等人提出了基于改进型脉冲耦合神经网络(PCNN)的自适应分割算法。他们在原有PCNN模型的基础上对神…...
)
手把手教你用Vivado 2019.1和Tri Mode Ethernet MAC IP,在Artix-7上搞定千兆UDP通信(附RTL8211E/YT8531C/KSZ9031配置)
基于Artix-7的千兆以太网UDP通信实战指南 在嵌入式系统开发中,实现稳定可靠的网络通信一直是工程师面临的挑战之一。特别是当项目需要高速数据传输时,如何选择合适的硬件平台和协议栈就显得尤为重要。本文将聚焦Xilinx Artix-7 FPGA平台,详细…...

机器学习40讲-总结课:机器学习的模型体系
用17讲的篇幅,我和你分享了目前机器学习中的大多数主流模型。可是除开了解了各自的原理,这些模型背后的共性规律在哪里,这些规律又将如何指导对于新模型的理解呢?这就是今天这篇总结的主题。 要想在纷繁复杂的模型万花筒中梳理出一条清晰的脉络,还是要回到最原始的出发点…...


如何用applera1n免费绕过iOS激活锁:完整指南与操作教程
如何用applera1n免费绕过iOS激活锁:完整指南与操作教程 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 你是否购买了一部二手iPhone或iPad,却发现设备被原主人的Apple ID锁定&a…...