【嵌入式环境下linux内核及驱动学习笔记-(18)LCD驱动框架1-LCD控制原理】
目录
- 1、LCD显示系统介绍
- 1.1 LCD显示基本原理
- 1.1.1 颜色的显示原理:
- 1.1.2 图像的构成
- 1.2 LCD接口介绍
- 1.2.1 驱动接口 - MCU接口
- 1.2.2 驱动接口 - RGB接口
- 1.2.3 驱动接口 - LVDS接口
- 1.2.4 驱动接口 - MIPI接口
- 1.2.5 RGB / MIPI / LVDS三种接口方式的区别:
- 2、RGB控制原理
- 2.1 LCD显示系统结构
- 2.2 基本显示过程
- 2.3 LCD时钟控制
- 2.3.1 像素时钟
- 2.3.2 水平同步时钟 HSYNC
- 2.3.3 显示一帧 - 垂直同步时钟VSYNC
- 2.4 控制时序
- 2.5 LCD时序与显示的映射关系
- 2.6 linux对LCD时序的抽象
- 2.6.1 struct fb_videomode 显示参数结构体
- 2.6.2 判断 HSYNC,VSYNC,VCLK, VDEN信号是否需要反转
- 3、实验环境介绍
- 4、 exynos4412的LCD控制器相关知识点介绍
- 4.1 显示控制器介绍
- 4.2 时钟
- 4.3 RGB接口
- 4.3.1 RGB接口控制器
- 4.3.2 RGB接口规范
- 4.3.3 信号
- 4.3.4 LCD RGB接口时序
- 4.4 寄存器
- 4.4.1 寄存器概况
- 4.4.2 寄存器使用详述
- 4.4.2.2 时钟寄存器
- CLK_SRC_LCD0 (P505)
- CLK_SRC_MASK_LCD
- CLK_DIV_LCD (P530)
- CLK_GATE_IP_LCD (P556)
- 4.4.2.3 系统寄存器
- LCDBLK_CFG (P884)
- LCDBLK_CFG2 (P886)
- 4.4.2.4 LCD控制寄存器
- VIDCON0 (P1838)
- VIDCON1 (P1839)
- VIDTCON0 (P1842)
- VIDTCON1
- VIDTCON2 (P1843)
- VIDTCON3 (P1843)
- WINCON0 (P1844)
- SHADOWCON (P1859)
- WINCHMAP2
- VIDOSD0A VIDOSD0B VIDOSD0C(P1863)
- 4.4.2.5 电源管理寄存器
- 9 LCD0_CONFIGURATION
- 5、结语
本篇是LINUX3.14环境中的LCD驱动框架的第一篇,主要讲解LCD显示的基本原理,RGB控制器的运行原理,LCD硬件编程的准备知识,包括大量的需要使用到的寄存器详述。由于涉及到大量的细节,因此写的过程中难免有错误与遗漏,因此,如有发现错漏,请及时留言指出。哪些地方不好理解,或没说明白,也请指出,我们一起讨论完善。
1、LCD显示系统介绍
1.1 LCD显示基本原理
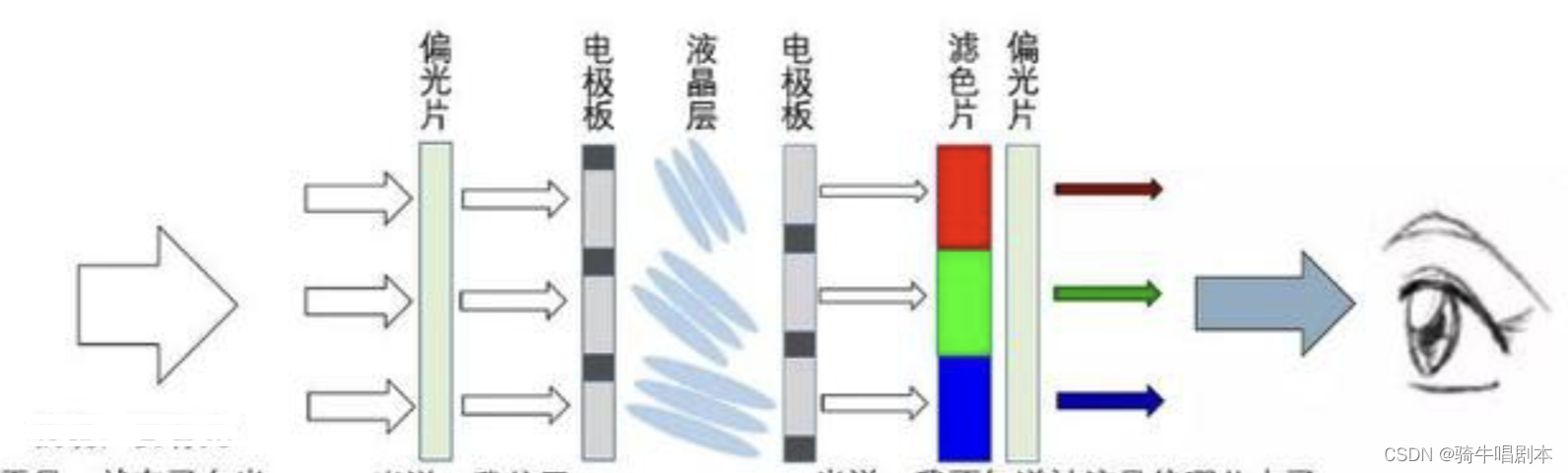
\qquad 从这张图就可以看出。白光经过楄光和液晶层后通过每一个像素的RGB的三个子像素后,就能呈现出彩色图像。
\qquad 因此,LCD的电路主要任务就是控制如图中的电极板,从而控制液晶形态而达到控制每个红兰绿子像素的秀光量。
\qquad 当前主流的LCD是TFT,特点是超薄、清晰。
1.1.1 颜色的显示原理:
\qquad 显示器的颜色一般采用RGB标准,通过对红(RED)、绿(GREEN),蓝(BLUE)三个颜色相互叠加得到各种不同的颜色。
- 通过对颜色的编码来对颜色进行量化(即转换成数字量,RGB是一种编码方式);
- 每种颜色根据RGB格式不同,每种颜色的量化位不相同;
- 常见的RGB格式有RGB565/RGB888,即:
RGB565: red :5 green : 6 blue:5(16BPP)
RGB888: red :8 green : 8 blue:8(24BPP) - 有的还会有个alpha参数,用于实现图形渐变效果,以及半透明效果,0xFFF=全透明,0x0=不透明;
1.1.2 图像的构成
像素:
- 像素pix,显示的最小单位;
- 在计算机只常用若干位数据来表示一个像素,比如使用R8、G8、B8共24位来表示一个像素,这个也称为像素深度,单位为BPP 常见的有16BPP/24BPP;
- 像素深度越大,则一个像素点所显示的颜色就越多,所显示的颜色更广;
帧:
- 一屏图像被称为一帧,每帧里面由行列排列的像素组成;
调色板:
\qquad 画油画的时候,通常先在调色板里配好想要的颜色,再用画笔沾到画布上作画。
\qquad LCD控制器里也借用了这个概念,从FrameBuffer获得数据,这个数据作为索引从调色板获得对应数据,再发给电子枪显示出来。
\qquad 假如是16BPP的数据,LCD控制器从FB取出16bit数据,显示到LCD上。
\qquad 当如果想节约内存,对颜色要求也没那么高,就可以采用调色板的方式,调色板里存放了256个16bit的数据,FB只存放每个像素的索引,根据索引去调色板找到对应的数据传给LCD控制器,再通过电子枪显示出来。
1.2 LCD接口介绍
\qquad 不同的组件之间的连接,需要做好很多约定,这些软硬件的约定构成了接口。在LCD的屏与控制器之间的接口是开发者重点要关注的。接口有不同层次的分别,使用时注意区分:
LCD驱动接口:
用于连接LCD驱动器与LCD控制器这间的软硬件规范。是芯片级的接口。
- 在单片机上:MCU接口
- 在嵌入式中:RGB接口、LVDS接口、MIPI-DSI接口
LCD传输接口:
当LCD与SOC有一定的距离,就需要用到传输技术来为控制器和驱动器传递信号,传输线缆与控制器之前的连接也涉及到相应的软硬件规范。
- HDMI
- DP
- USB
1.2.1 驱动接口 - MCU接口
- 应用领域:小尺寸手机屏,单片机应用,一般4寸以下。
- 优势:价格便宜。
- 劣势:指令逐点写入,速度慢
- 接口执行标准:Intel 8080总线标准(I80标准)
-
- 8080模式 、6800模式
-
- 并行8位、16位、18位、24位传输
-
- 无需时钟和同步信号
- L C D 驱动器要内置 G R A M \color{red}{LCD驱动器要内置GRAM} LCD驱动器要内置GRAM,直接一对一投射每个象素。
- 显示过程 不需要点、行、帧时钟 \color{red}{不需要点、行、帧时钟} 不需要点、行、帧时钟。
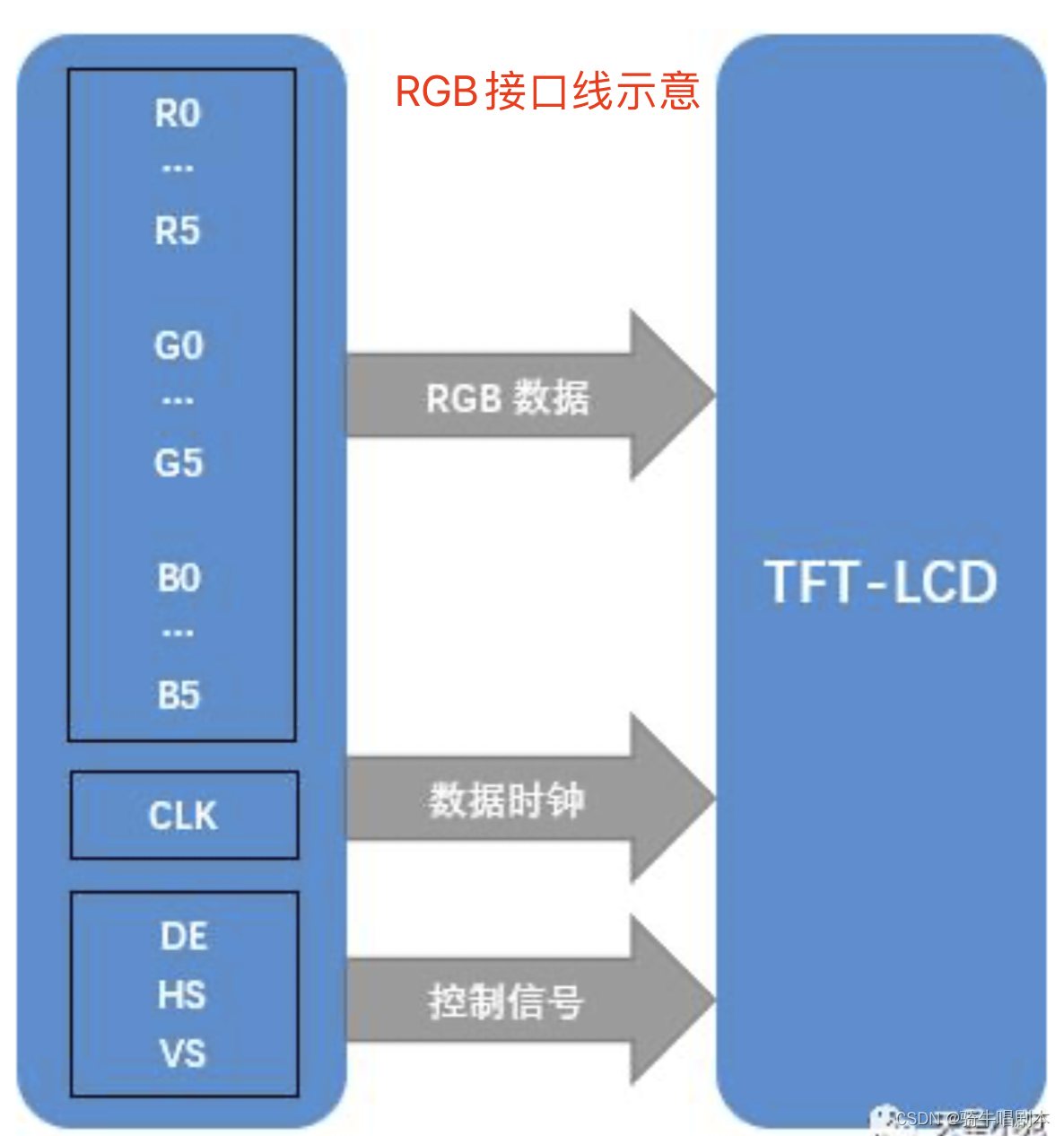
1.2.2 驱动接口 - RGB接口
- 应用领域:嵌入式应用,一般7寸以上。
- 优势:直接写屏,显示速度快
- 劣势:价格高,功耗大,抗EMI电磁干扰弱
- 接口执行标准:TTL
-
- 颜色编码方式RGB24 / RGB888 / RGB555 / RGB565 / RGB666
-
- 并行24位传输
-
- 显示过程要有时钟和行、帧同步信号等(HSYNC, , VSYNC , ENABLE , CS , RESET , RS)
- 显存是 内存映射 \color{red}{内存映射} 内存映射,LCD驱动中没有GRAM。
1.2.3 驱动接口 - LVDS接口
LVDS:Low Voltage Differential Signaling 是一种低压差分信号技术接口。
- 应用领域:嵌入式应用,一般7寸以上。
- 优势:直接写屏,显示速度快,功耗小,EMI电磁干扰小
- 劣势:价格高
- 接口执行标准:LVDS
-
- 信号内容:RGB
-
- 常见的lvds接口分为四通道、五通道、十通道。
- 速度快,常见的有几百Mbit/s
1.2.4 驱动接口 - MIPI接口
MIPI:Mobile Industry Processor Interface 移动行业处理器接口
- 应用领域:移动嵌入式领域
- 应用的接口标准:DSI(Display Serial Interface Specification)和 CSI(摄像头接口)
- 优势:高速,功耗小,干扰小
- 劣势:价格高
- 接口执行标准:
-
- 信号内容:视频流数据和控制指令
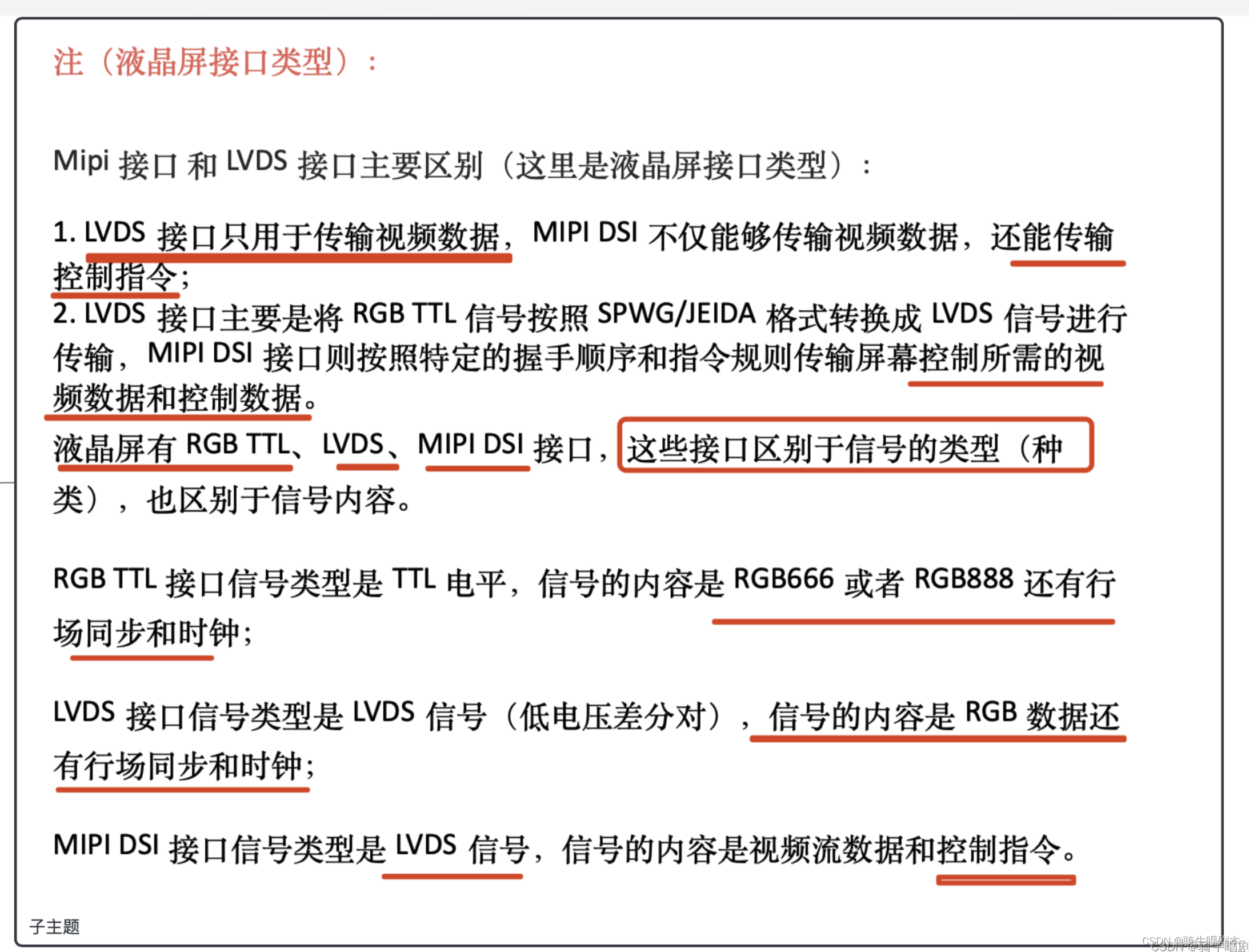
1.2.5 RGB / MIPI / LVDS三种接口方式的区别:
2、RGB控制原理
由于手上是一块RGB的7寸电容屏,因此,本文重点介绍RGB接口的驱动方法。
下面这些内容会涉及到比较多的细节,这是因为在具体编写驱动时,会设置LCD控制器和LCD屏的很多参数,这些个参数的具体与硬件的对应关系就在本章节列述。如果不想看那么多,可直接跳到第三章看框架介绍。在具体编写驱动时再回头来看本章。
2.1 LCD显示系统结构
在嵌入式领域,RGB接口的LCD驱动结构一般如下图所示:
图2.1
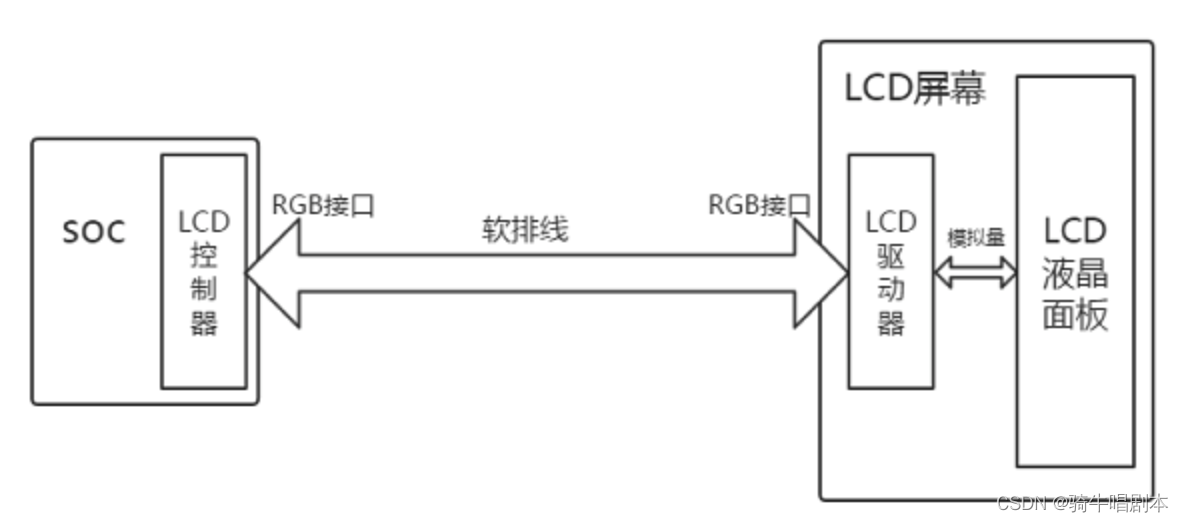
| 组件 | 描述 |
|---|---|
| SoC | 负责发送显示数据及控制指令等给LCD。 |
| 显 存 | SoC在内存中选一段内存,用来存放颜色数据(应用程序通过往显存中写数据),然后通过配置将LCD控制器和这一段内存连接起来,构成一个映射关系,一旦这个关系建立以后,LCD控制器就会自动从显存中读取像素数据传给LCD驱动器,LCD驱动器会自动的控制每个像素点的液晶分子,以形成最终的图像,建立这个映射以后就不需要SoC再来参与任何行为了。 |
| LCD控制器 | 在SoC内部会集成有LCD控制器,它负责通过数字接口向外部的LCD驱动器提供要显示的像素数字信号。它必须按照一定的时序和LCD驱动器通信,LCD控制器受SoC控制,SoC会从内存中拿出像素数据给LCD控制器并最终传给LCD驱动器。 |
| LCD驱动器 | LCD驱动器一般与LCD面板集成在一起,面板需要一定的模拟电信号来控制液晶分子,LCD驱动器芯片负责给面板提供控制液晶分子的模拟电信号,驱动器的控制信号(数字信号)来自于LCD控制器的提供的接口。 |
2.2 基本显示过程
LCD显示一张图片,其实是每一个像素点的填充,只是速度很快我们人眼没有察觉而已。
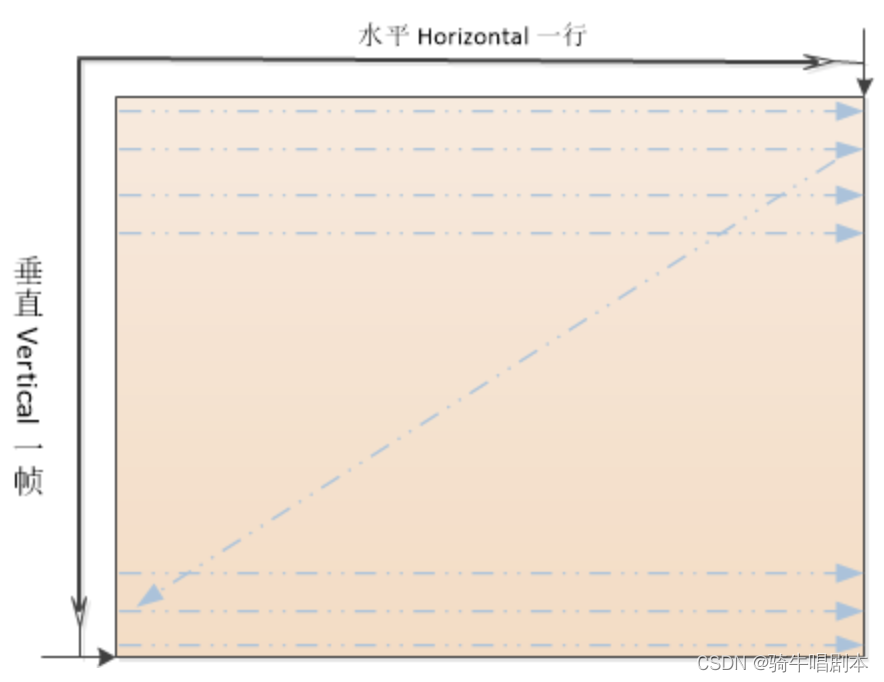
- 我们将LCD屏幕分为水平方向和垂直方向
- LCD每一行的像素点被逐一填充,填充完一行继续填充下一行,填充顺序可以为左->右 或者 右->左
- 每一帧图像,就从第一行的第一个像素点一直填充到最后一行的最后一个像素点。
- 例如上图就现实一帧的图像(从左到右,从上到下)。
2.3 LCD时钟控制
时钟是LCD正确工作的核心因素。上面所描述的每个像素的逐一发送,每一行,每一帧的正确发送,都依靠各个时钟的有序运作。其中最基础的是像素时钟。
2.3.1 像素时钟

\qquad 如上图,展示的是一个800*480的RGB LCD屏幕。 24bpp 显示模式(即红绿蓝三色,每色由8bit数位表示)。 显示一行,LCD需要填充800个像素点。每一个像素由RGB三元素组成,每个元素(R、G、B)由8bit位数组成,也就是说一个像素我们需要通过信号线传输24bit的数据。
\qquad 如图所示,每一个clk的脉冲,发送一个像素数据。一行共发送800个像素数据。
\qquad 像素时钟clk是一个持续的信号,在实际工作中必须还要解决,哪一个CLK代表一行的开始?哪一个CLK代表第一个有效的像素数据?这就需要有水平同步时钟HSYNC。
2.3.2 水平同步时钟 HSYNC
HSYNC水平同步信号,表示一行数据的开始。具体如下图

\qquad 其中CLK没有任何变化,只是多了HSYNC和DEN(上图中的ENB)两个信号。
\qquad 如图中的红色箭头,当HSYNC产生了如图所示的变化表示新的一行数据传送马上开始,当ENB信号线为高电平期间传输的数据视为有效数据。这样一来,一行800个像素的数据才能正确的传送完成。
2.3.3 显示一帧 - 垂直同步时钟VSYNC
\qquad 按照我们之前假设的800*480LCD。从第一行一直到最后一行,整个LCD屏幕所有像素填充完毕,这一过程也就是写了一帧数据,我们如果要LCD能够实时显示画面,很显然一帧数据肯定不够,所以要给LCD不断的提供新的帧数据,这无非也就是重复上述显示一帧的过程。
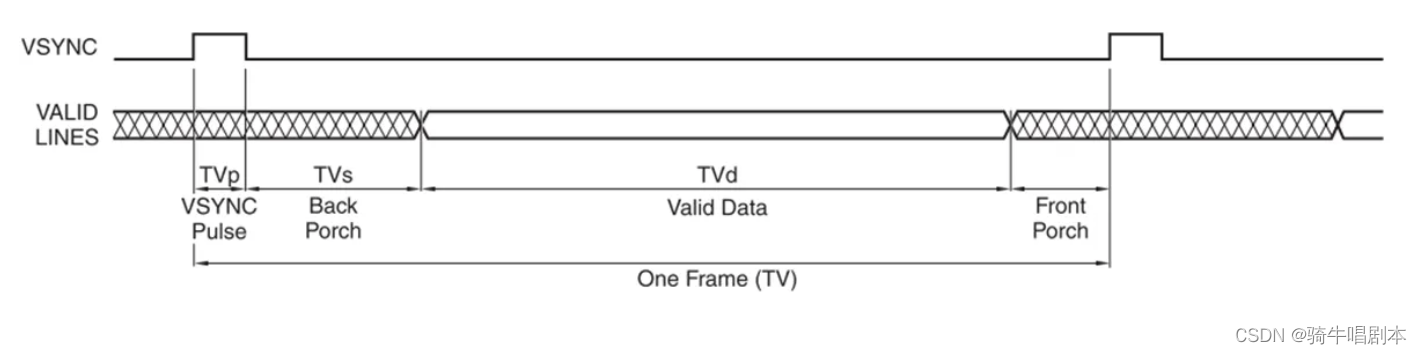
\qquad 上图中VSYNC垂直同步信号,当产生如图所示的变化,就代表新的一帧数据马上开始传送。那么这里怎么没有有效数据信号DEN呢??
\qquad 其实很简单,因为新的一帧数据不就是从LCD第一行的第一个像素开始填充嘛,那么前面我们已经说明了每一行都自己的同步信号,而每一行也有对应的数据有效信号线。所以垂直同步信号只用关心从一帧数据的同步,而不同关心每一行的同步。
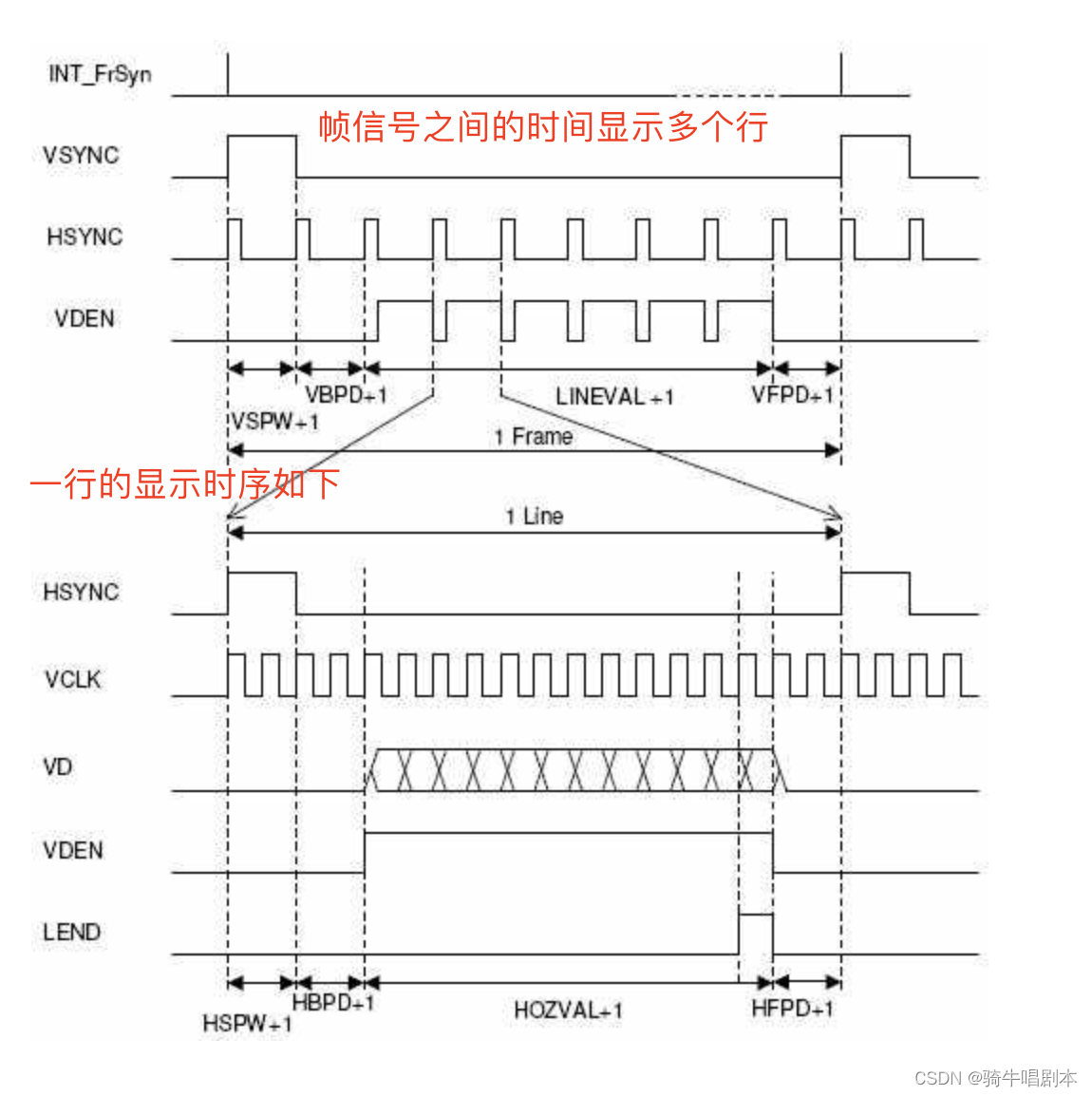
于是,我们将上面分析的时钟放在一起,就变成了LCD RGB模式的典型时序图 。
2.4 控制时序
\qquad 时序图完整的描述了几个不同的控制信号之间如何相互协作。以及各个信号之间的工作间隔时间等。对于LCD控制器的寄存器设置的相关参数,也在这个时序图中描述。
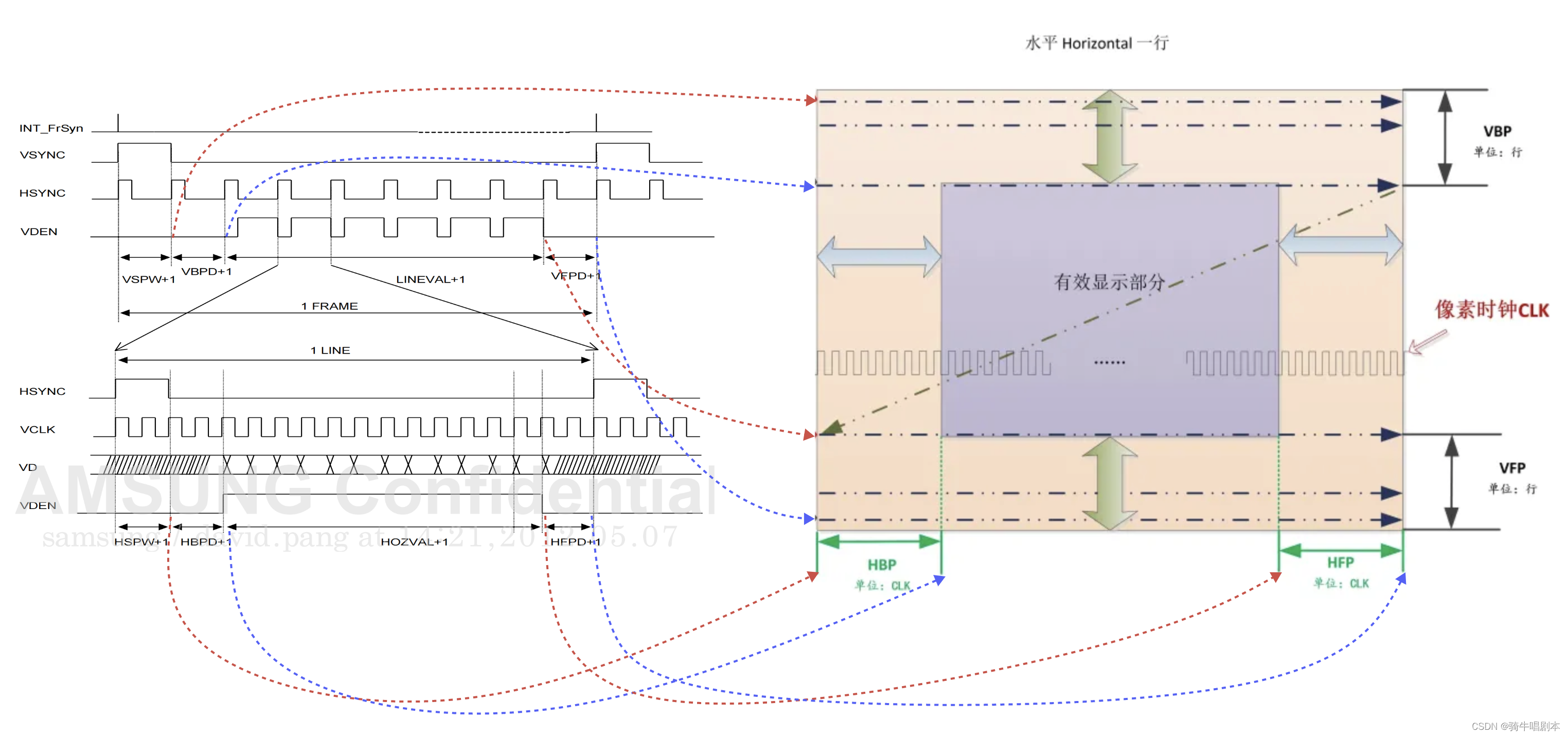
\qquad 下面这个是一个典型的完整的时序图。
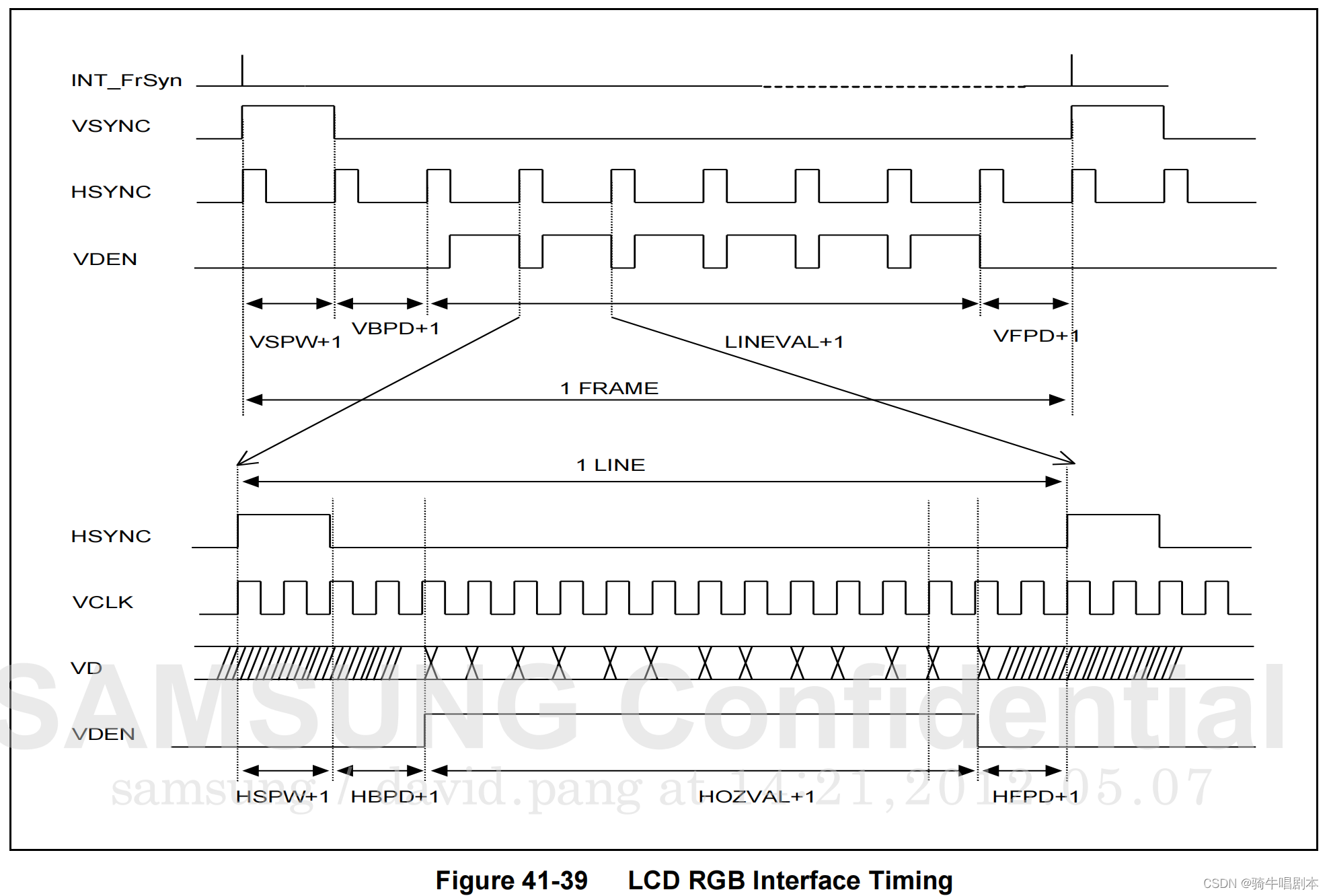
图2.2
控制信号释义:
| 信号 | 名称 | 作用 |
|---|---|---|
| VD(Video Data) | 数据信号 | 用于传输图像的像素数据。每个像素的颜色信息通过VD信号传输。 |
| HSYNC(Horizontal Sync) | 水平同步信号 | 用于同步每行图像数据的传输。每发出一个HSYNC脉冲,表示新的一行图像数据开始发送。 |
| VSYNC(Vertical Sync) | 垂直同步信号 | 用于同步每帧图像数据的传输。每发出一个VSYNC脉冲,表示新的一帧图像数据开始发送。 |
| VDEN(Video Data Enable) | 数据有效标志 | 与HSYNC和VSYNC信号结合使用。VDEN信号表示VD数据的有效性,只有在VDEN为高电平时,VD数据才是有效的。 |
| LEND(Line End) | 行结束标志 | 是一种时序信号,用于表示一行图像数据的结束。不是所有接口都需要使用LEND信号,例如210接口就没有。 |
| VCLK(Video Clock) | 时钟信号 | 用于同步图像数据的传输。VCLK信号的频率决定了图像数据的传输速度。 |
\qquad 想象每个像素点是由电子枪发射出来的,电子枪依次扫描整个LCD界面,就显示了一副完整的图像。
\qquad 当发出一个HSYNC信号后,电子枪就会从行末花费HBP时长移动到行首;然后在VCLK时钟下,在下图中阴影区域显示像素;等到了行末后,再等待HFP时长待HSYNC信号到来,再移动到行首,如此往复。因此,HBP和HFP分别决定了左边和右边的黑框。
\qquad 同理,当发出一个VSYNC信号后,电子枪就会从列末花费VBP时长移动到列首;然后在VCLK时钟下,在图中阴影区域显示像素;等到了列末后,再等待VFP时长待VSYNC信号到来,再移动到列首,如此往复。因此,VBP和VFP分别决定了上边和下边的黑框。
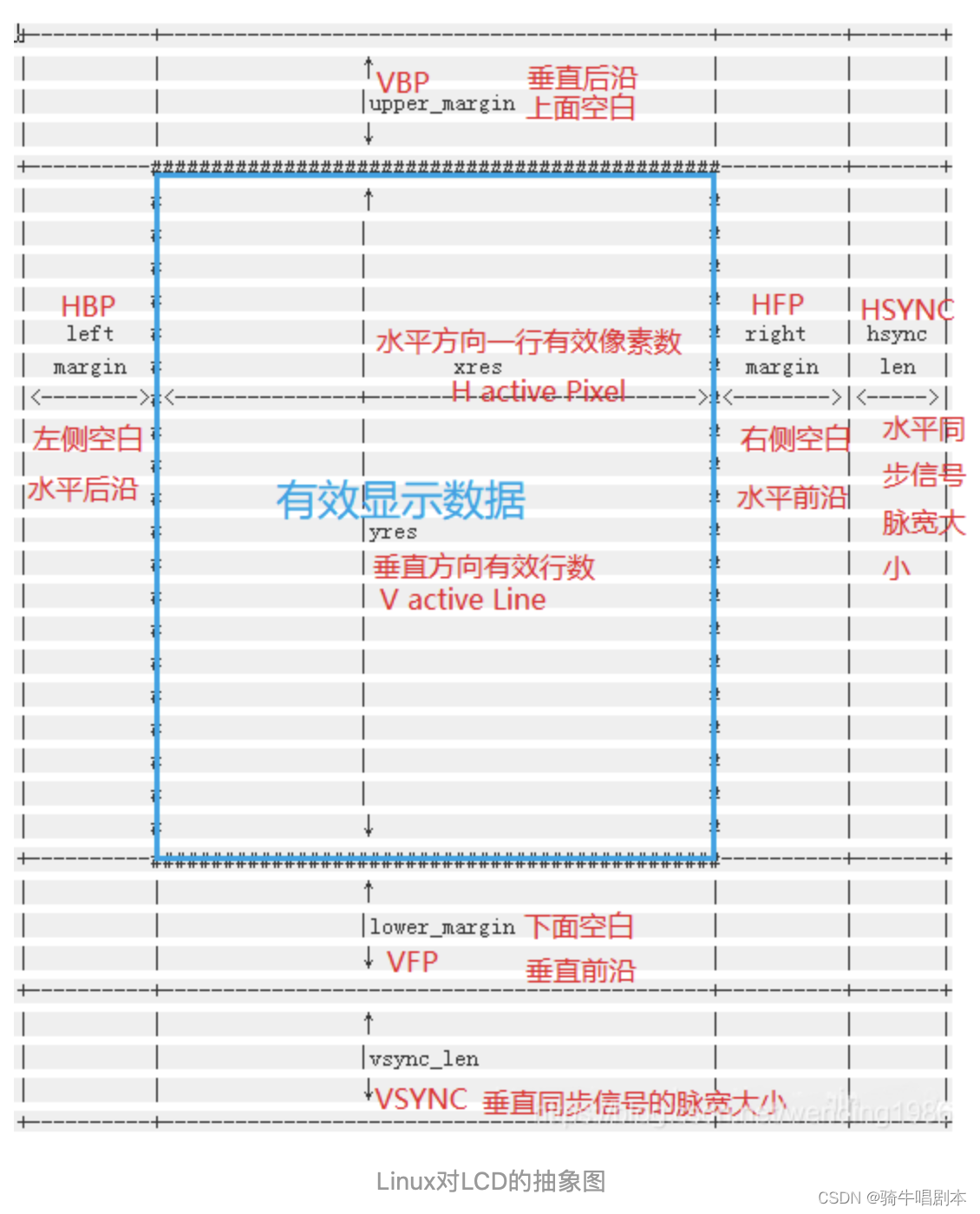
2.5 LCD时序与显示的映射关系
下图是从LCD控制器的角度理解的显示映射关系:
显示步骤
为了更好的理解上图,总结成以下几个过程:
- 1、产生垂直信号,表示一帧数据将要开始
- 2、经过VBP个行后才开始有效数据的第一行 (类似上边距)
- 3、经过HBP(具体的数值在后面会解释)个CLK后才开始传输每行的有效数据。(类似调整了A4纸张的左边距)
- 4、每行有效数据传输完毕,经过HFP个CLK后才开始下一行。(类似右边距)
- 5、重复3和4两个步骤一直到有效行显示完。
- 6、有效行显示完毕后,经过VFP个行后再开始下一帧数据 (类似下边距)
时序参数的含义如下,参照上图理解:
| 英文缩写 | 名称 | 作用 |
|---|---|---|
| HSPW(Horizontal Sync Pulse Width) | 行同步信号的脉宽 | 单位为1VCLK的时间。 |
| HBP(Horizontal Back Porch) | 水平后肩 | 水平同步信号HSYNC的下降沿到VDEN的上升沿的间隔称为HBP。单位为1VCLK的时间。在图中为HBPD+1。 |
| HFP(Horizontal Front Porch) | 水平前肩 | 把VDEN的下降沿到水平同步信号HSYNC的上升沿的间隔称为HFP,单位为1VCLK的时间。在图中为HFPD+1。 |
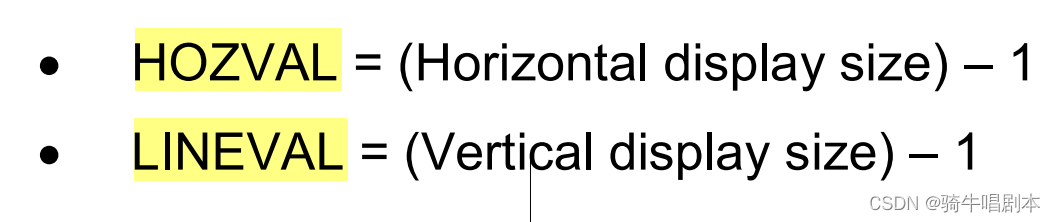
| HOZVAL | 行显示尺寸-1,即屏列宽-1 | 对于800*480分配率的LCD屏,那么HOZVAL=800-1=799,请记住,是屏列宽,也就是LCD屏显示一行数据所需要的像素(pixel)的数目。 |
| VSPW(Vertical Sync Pluse Width) | 帧同步信号的脉宽 | 单位为1行(Line)的时间。 |
| VBP(Vertical Back Porch) | 垂直后肩 | 垂直同步信号VSYNC下降沿到VDEN信号产生之前的一个行同步信号VHSYNC的上升沿之间隔。单位为1行(Line)的时间。在图中为VBPD+1。 |
| VFP(Vertical Front Porch) | 垂直前肩 | VDEN数据信号的下降沿到垂直同步信号VSYNC产生的上升沿之间隔。单位为1行(Line)的时间。在图中为VFPD+1。 |
| LINEVAL | 帧显示尺寸-1,即屏行宽-1 | 对于800*480分配率的LCD屏,那么LINEVAL=480-1=479,请记住,是屏行宽,也就是LCD屏显示一帧数据所需要的行的数目。 |
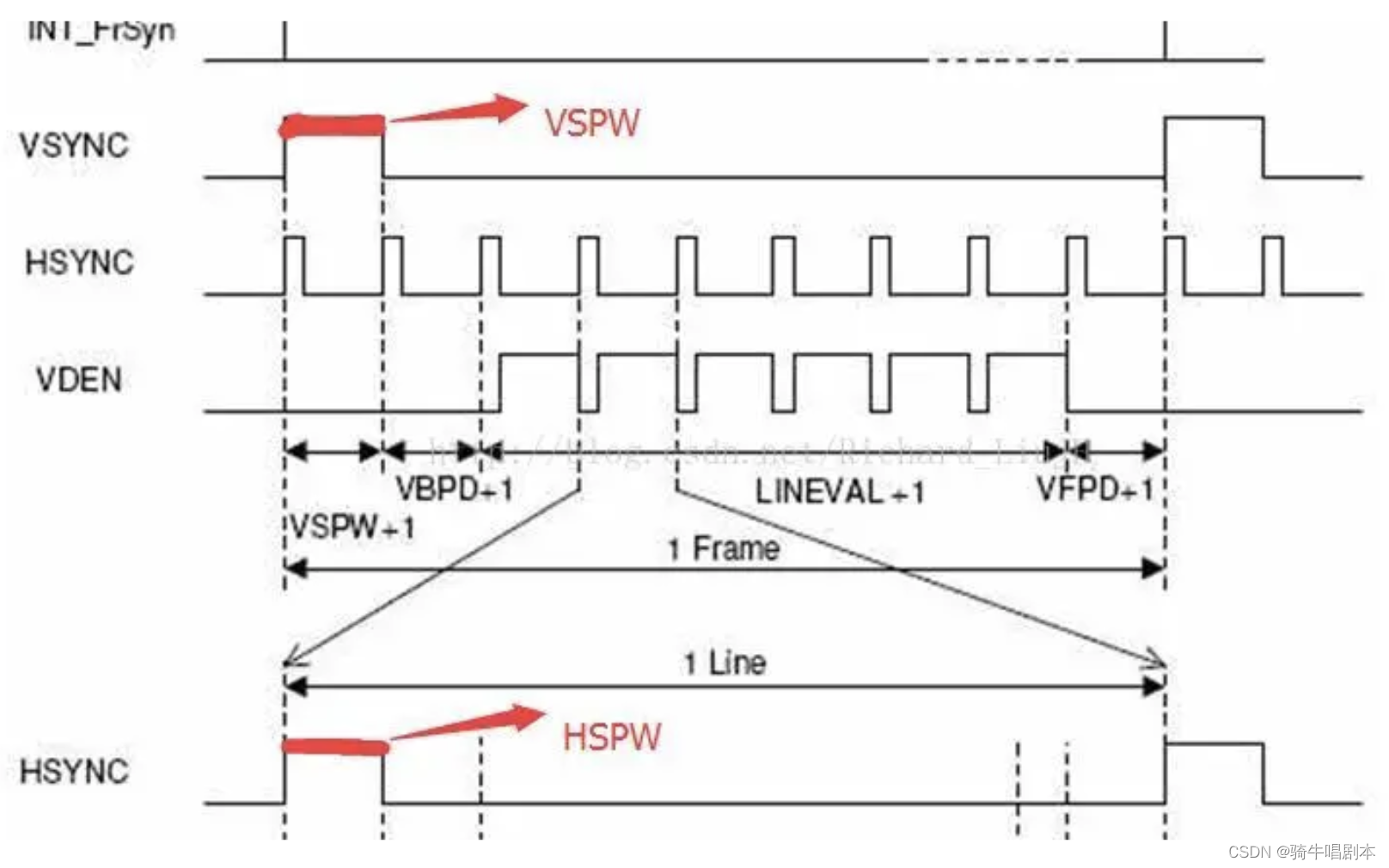
VSPW、HSPW这两个值其实很简单,其中的W代表width也就是宽度的意思。所以这两个值分别描述的是垂直信号和水平信号的宽度,如下图所示。
时间计算:
由图2.2可知:
- 扫描一帧所需的时间: T = ( ( VSPW+1 ) + ( VBPD + 1 ) + ( LINEVAL + 1) + ( VFPD + 1 ) ) 个行时间。
- 扫描一行所所需的时间: = ( ( HSPW + 1 ) + ( HSPD + 1 ) + ( HFPD + 1 ) + ( HOZVAL + 1 ) ) 个VCLK时间。
而一个VCLK时间由LCD寄存器VIDCON0内的CLKVAL决定:
- VCLK = HCLK / ( CLKVAL + 1 ) ------>这个公式是exynos4412的LCD控制器的,其他CPU的不一定一样
因此扫描一帧所需的时间:
- T = [(VSPW+1)+(VBPD+1)+(LINEVAL+1)+(VFPD+1)] * [(HSPW+1)+(HSPD+1)+(HFPD+1)+ (HOZVAL+1)] * HCLK/ (CLKVAL+1)
即帧频率为:1/T
2.6 linux对LCD时序的抽象
下图为从linux角度对lcd时序的理解,这与前面从LCD控制器的角度对lcd时序的理解差别在于hsync_len和vsync_len。这实际是没有区别的,只是理解的角度不同。因要写的是linux的驱动,因此要清楚从linux的角度是如何映射的。
对应如下这个数据结构体:
2.6.1 struct fb_videomode 显示参数结构体
/* include/linux/fb.h */
struct fb_videomode {
const char *name; 可选的视频模式名称。这个成员用于存储视频模式的名称,可以是一个字符串。
u32 refresh; 可选的刷新率。这个成员用于指定视频模式的刷新率,以每秒刷新次数表示。
u32 xres; 显示的水平分辨率。这个成员表示图像在屏幕上的水平像素数。
u32 yres; 显示的垂直分辨率。这个成员表示图像在屏幕上的垂直像素数。
u32 pixclock; 像素时钟频率。这个成员表示像素时钟的频率,用于计算图像的时序。
u32 left_margin; /*HBP*/ " 在每行象素数据开始输出前,需要要插入的空闲象素时钟周期数"
u32 right_margin; /*HFP*/ " 在每行象素数据结束到LCD行同步时钟脉冲之间,插入的空闲象素时钟数"
u32 upper_margin; /*VBP*/ " 在垂直同步脉冲之后,每帧开头前的无效行数"
u32 lower_margin; /*VFP*/ " 每帧数据输出结束到下一帧垂直同步时钟周期开始前的无效行数"
u32 hsync_len; /*HSYNC 或 HPW 或 HWH*/ " 行同步脉宽,水平同步时钟的脉冲宽度"
u32 vsync_len; /*VSYNC 或 VPW 或 VWH */ " 帧同步脉宽,垂直同步时钟的脉冲宽度"
u32 sync; "同步极性设置,可根据需要设置FB_SYNC_HOR_HIGH_ACT(水平同步高电平有效)和FB_SYNC_VERT_HIGH_ACT(垂直同步高电平有效)"
u32 vmode; 显示模式。这个成员指定了显示器的模式,例如非隔行模式或隔行模式。
u32 flag; 标志位。这个成员用于指示视频模式的一些特性和选项,例如是否支持透明度等
}; 重要参数详解:
- pixclock 像素时钟频率,在时序图上有时称DCLK 、VCLK 、CLK等,都 是一个意思。如:65MHZ的频率,这里要填写pixclock = 65000000。
- sync成员用于指定同步信号的类型,可以是水平同步、垂直同步或两者的组合。
-
- FB_SYNC_HOR_HIGH_ACT:表示水平同步信号在高电平时激活。在某些视频模式中,需要在高电平时发送水平同步信号。
-
- FB_SYNC_VERT_HIGH_ACT:表示垂直同步信号在高电平时激活。在某些视频模式中,需要在高电平时发送垂直同步信号。
-
- FB_SYNC_EXT:表示使用外部同步信号。某些设备可能支持使用外部同步信号而不是内部的同步信号。
-
- FB_SYNC_COMP_HIGH_ACT:表示复合同步信号在高电平时激活。复合同步信号是基于水平和垂直同步信号组合而成的同步信号。
-
- FB_SYNC_BROADCAST:表示广播视频时所使用的视频定时信息。在PAL制式下,垂直总行数为144行(渐进扫描)或288行(隔行扫描);在NTSC制式下,垂直总行数为121行(渐进扫描)或242行(隔行扫描)。
-
- FB_SYNC_ON_GREEN:表示同步信号发送在绿色通道上。某些视频模式可能需要使用绿色通道来传输同步信号。
- vmode成员用于指定视频模式的类型,可以是以下几种常见的填写方式:
-
- FB_VMODE_NONINTERLACED:表示非隔行模式,也即渐进扫描模式。在这种模式下,视频图像的每一帧都是通过逐行扫描显示的。
- - FB_VMODE_INTERLACED:表示隔行模式,也即隔行扫描模式。在这种模式下,视频图像的每一帧由两个交替的场组成,每个场只显示图像的一半行数,通过交替显示两个场来达到全帧显示的效果。
- FB_VMODE_NONINTERLACED:表示非隔行模式,也即渐进扫描模式。在这种模式下,视频图像的每一帧都是通过逐行扫描显示的。
-
- FB_VMODE_DOUBLE:表示双帧缓冲模式。在这种模式下,使用两个帧缓冲器来交替渲染显示图像的每一帧,可以减少视频闪烁的效果。
-
- FB_VMODE_ODD_FLD_FIRST:表示隔行模式下,先显示奇数场。在某些设备上,隔行扫描模式下,可以选择先显示奇数场还是偶数场。
-
- FB_VMODE_MASK:用于屏蔽其他标志位,只保留视频模式的相关信息。
-
- FB_VMODE_YWRAP:表示使用y轴环绕而不是滚动。在某些设备上,可以选择使用y轴环绕来显示图像而不是滚动显示。
-
- FB_VMODE_SMOOTH_XPAN:表示支持平滑的水平滚动。在某些设备上,可以平滑地滚动图像而不是简单地按照整数像素进行滚动。
-
- FB_VMODE_CONUPDATE:表示不要更新x和y偏移量。在某些设备上,可能希望固定x和y偏移量而不更新它们。
\qquad 在使用struct fb_videomode时,可以参考设备文档或相关的驱动程序来确定正确的填写方式。
2.6.2 判断 HSYNC,VSYNC,VCLK, VDEN信号是否需要反转
在具体驱动编写时,还要配置以上几个信号是否需要反转,并去设置相应的寄存器。判断的过程就是通过你SOC数据手册中介绍lcd的时序图,另外还要再对比你屏厂的数据手册的时序图就可以判断出来:
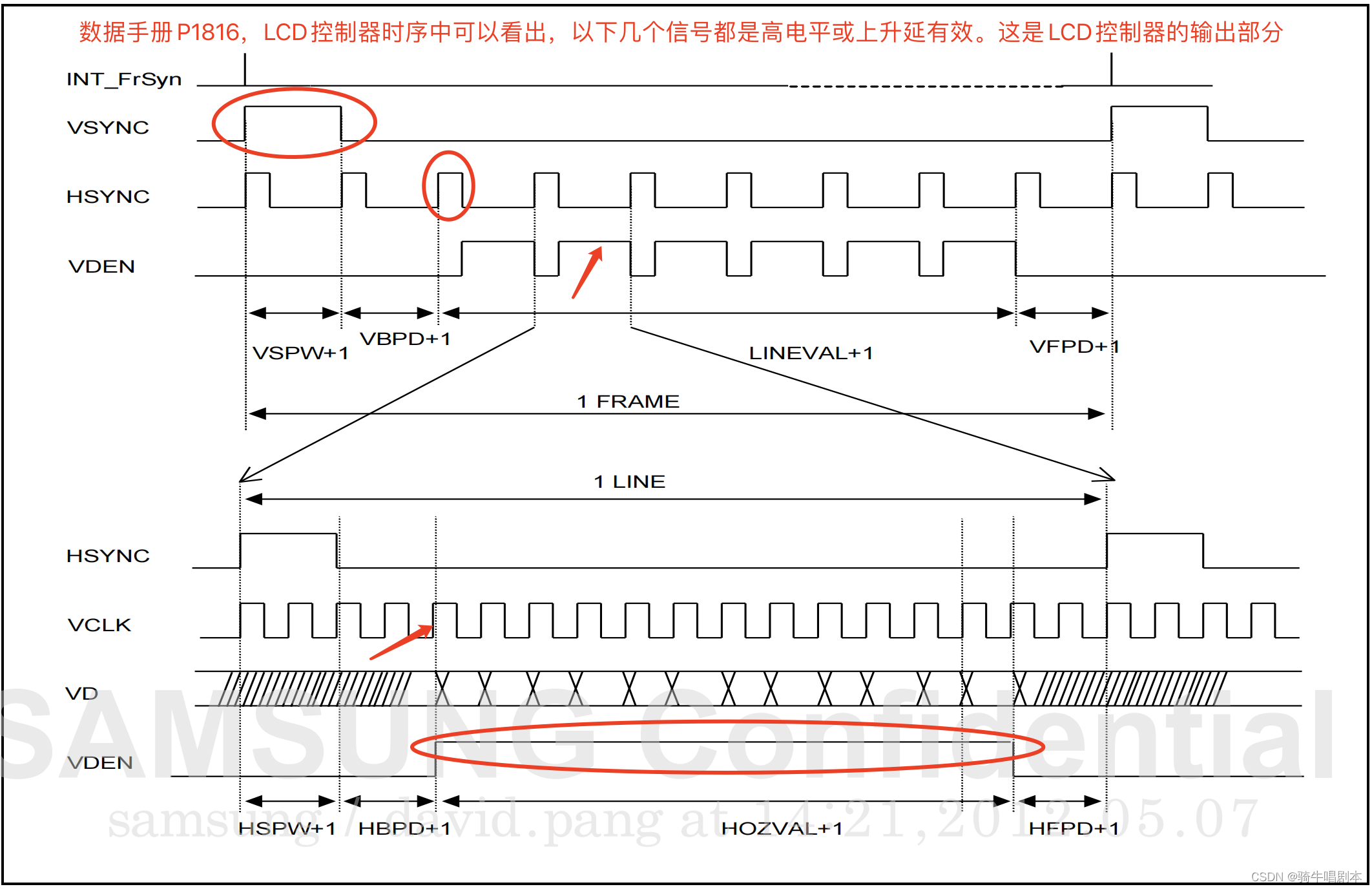
先看LCD控制器默认情况下送出来的TFT LCD屏的时序图:
图2.3-exynos4412 lcd控制器输出时序
再来看屏厂的时序图:
图2.4:LCD屏时序图
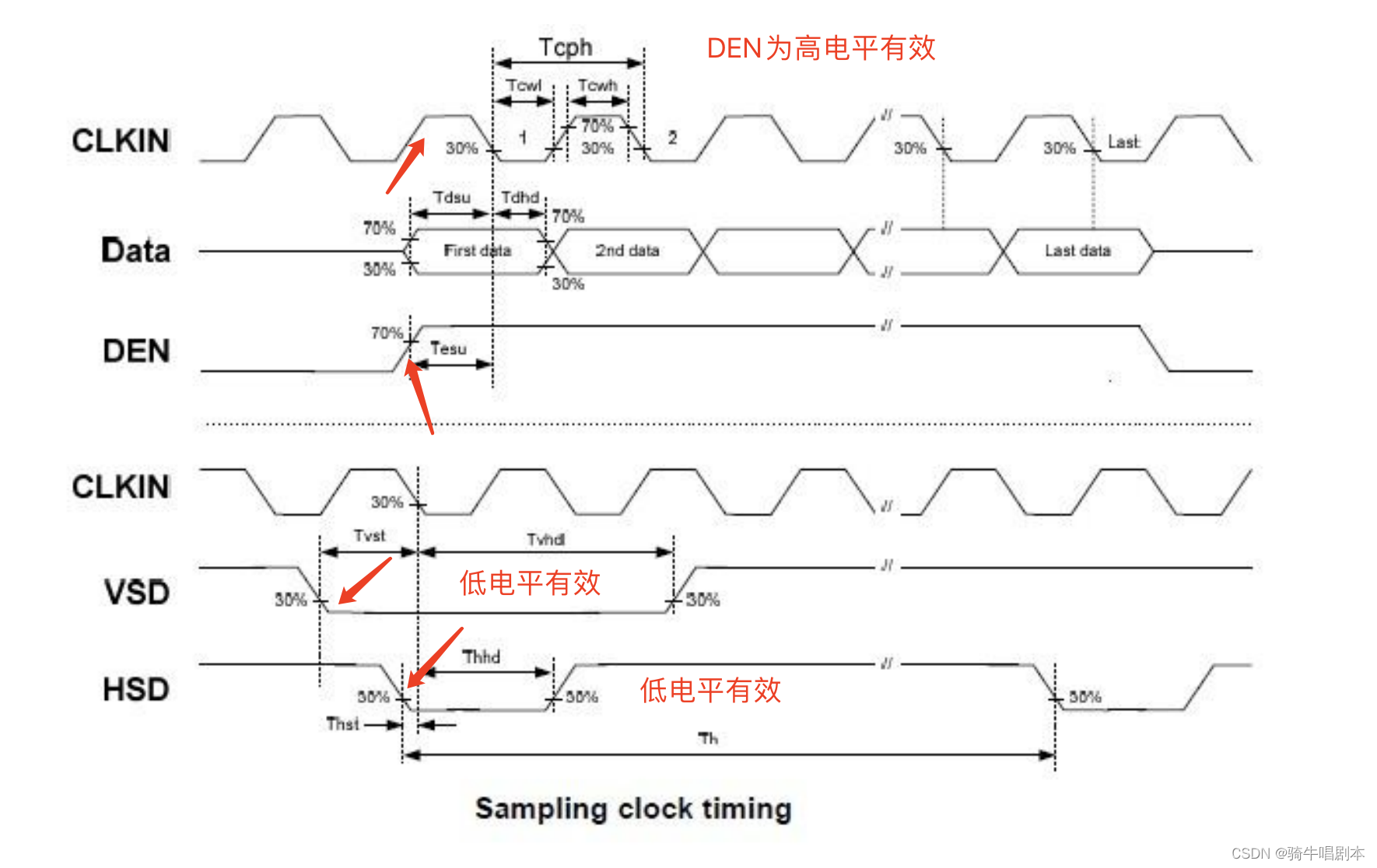
从上两图对比,可以看出实验用屏的VSYNC与HSYNC需要反转。
另个,从屏厂还提供的信号周期表,用来填写驱动的timing结构体:
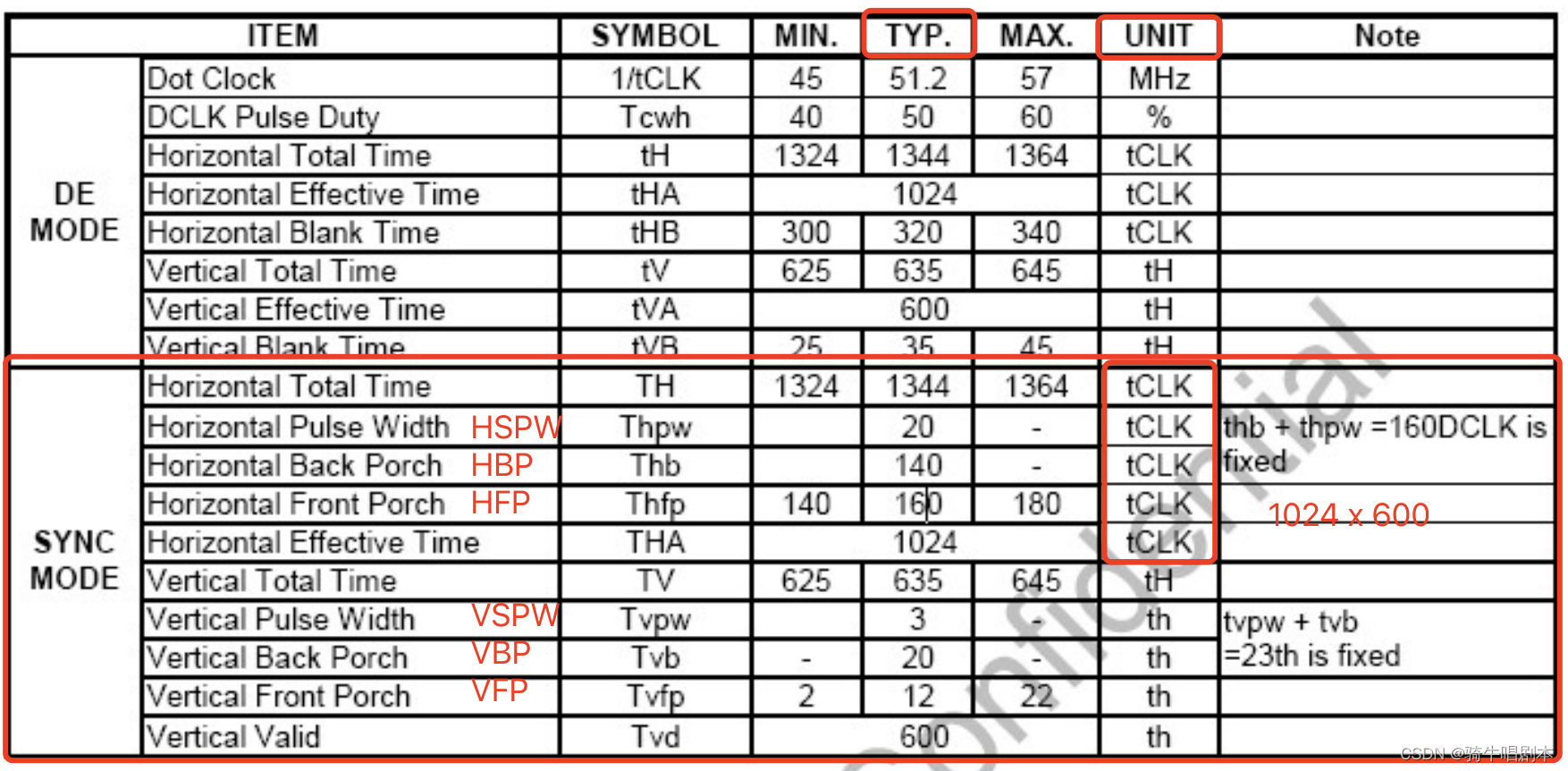
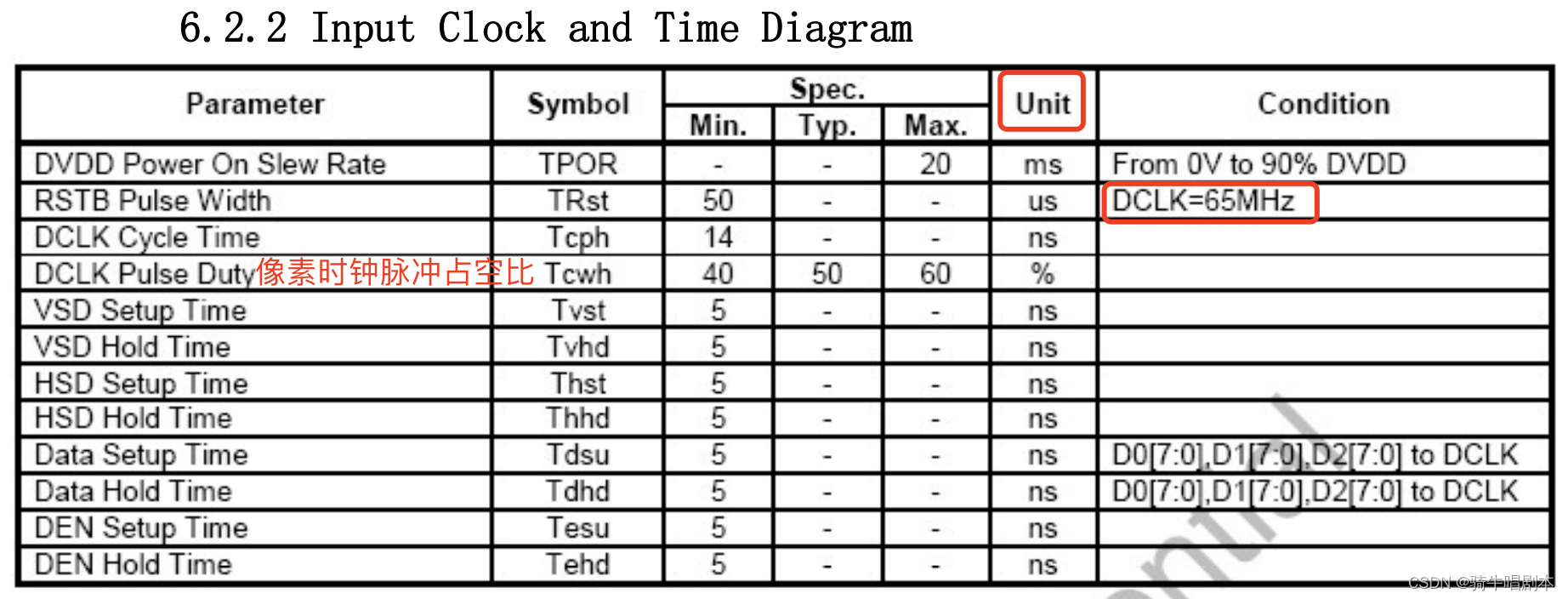
以上这两张图,在下面具体讲lcd屏驱动时,需要用到。
bpp(bits per pixel 像素深度):表示一个像素的颜色状态需要用几位来表示
1位:单色显示,只有亮灭之分,常见的如小店招牌
8位:灰度显示,此时能表示256种颜色,这时候显示不了色彩,但是有了黑白明暗的区别
16位:一般是RGB565的颜色分布,即16位色
24位:RGB888的颜色分布,称之为24位真彩
32位:还是RGB888的颜色分布,剩下的8位代表透明度,故称之为ARGB,是目前主流
3、实验环境介绍
- 开发板:华清fs4412
- SoC : samsung exynos4412 arm-A9框架
- LCD:7寸电容触摸tft-lcd屏,分辨率1024 x 600
- 驱动接口:并行24位RGB接口, 触摸屏I2C接口
- 物理接口:40P 间距0.5mm FPC连接器
- linux内核 : 3.14
- 交叉编译环境:arm-linux-gnueabi-
- FPC连接器定义:

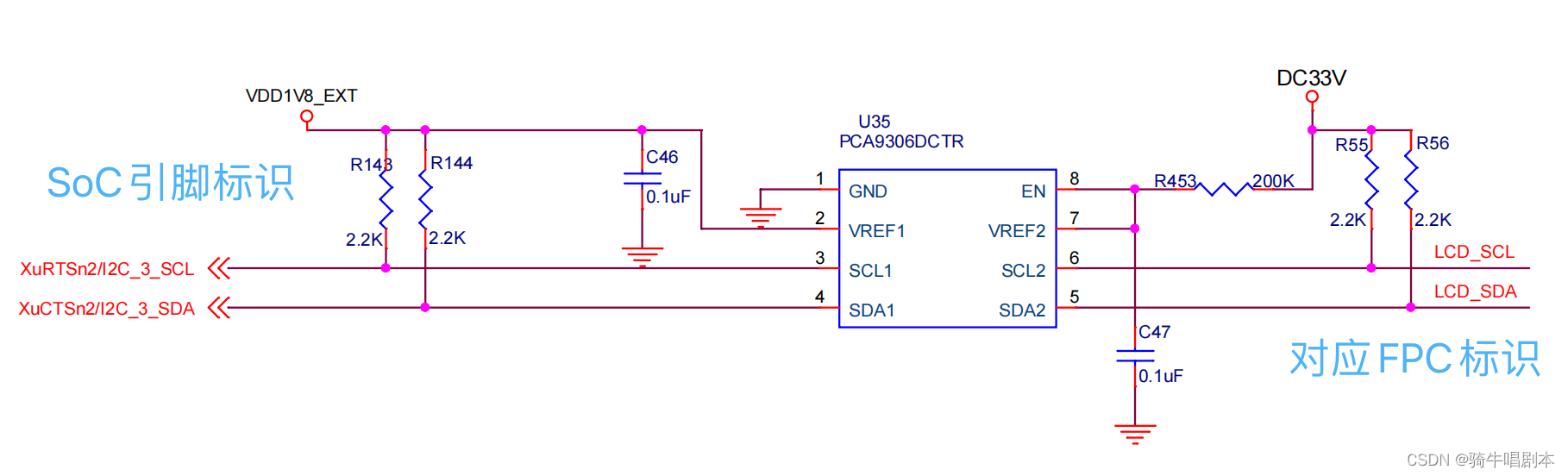
- SoC侧gpio接口定义
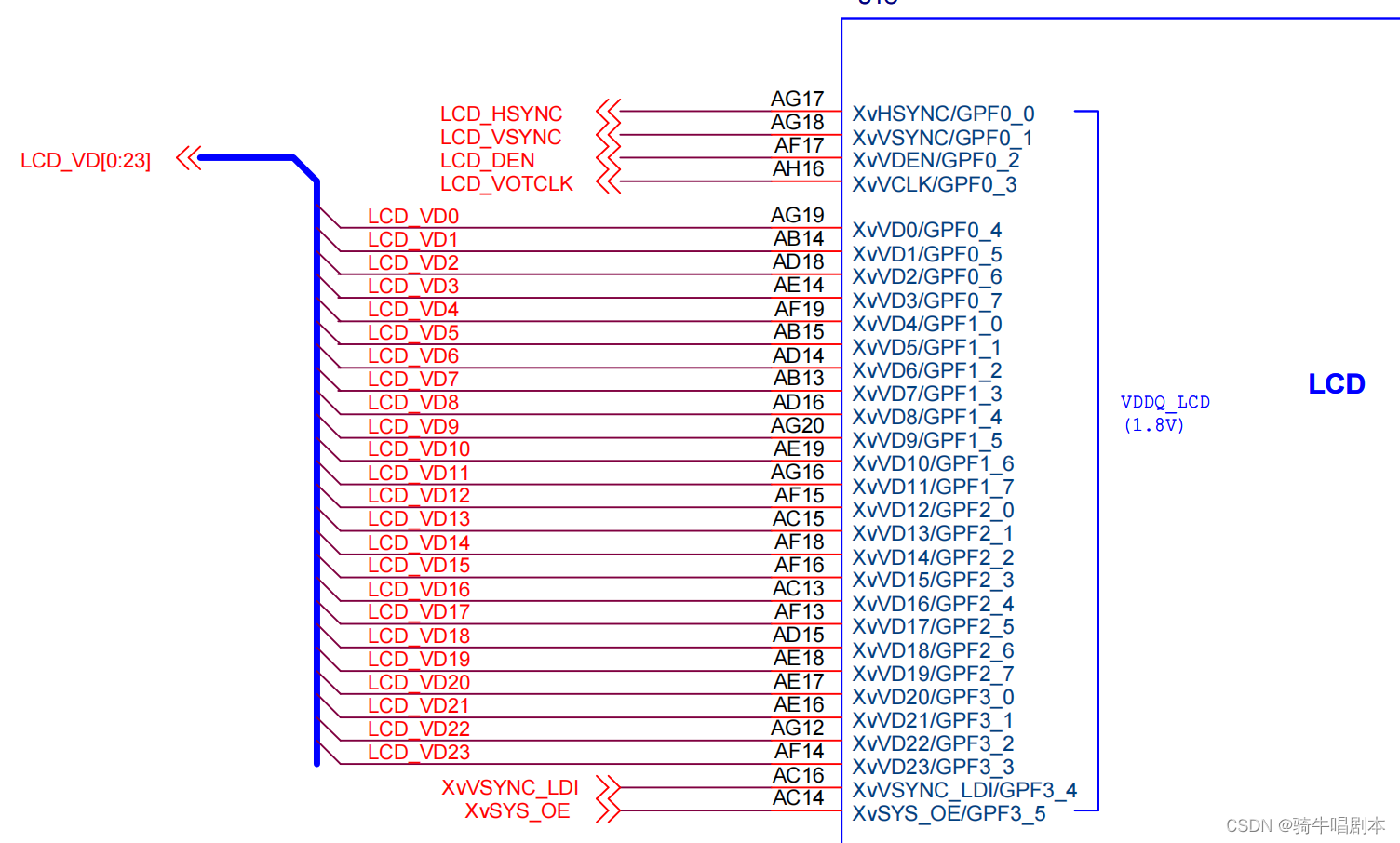



这样,所有的LCD屏与开发板相连接的引脚,都能一一对应到SoC上的GPIO脚上了。
- 驱动框架:FrameBuffer帧缓冲驱动框架
4、 exynos4412的LCD控制器相关知识点介绍
由于在linux3.14环境中,在实际编写LCD驱动程序中,不仅涉及到上面所介绍的相关lcd的控制原理,也涉及到如何设置LCD控制寄存器的相关。以下是对exynos4412的数据手册《(4412手册完整版)SEC_Exynos 4412 SCP_Users Manual_Ver.0.10.00_Preliminary》摘录与翻译:
4.1 显示控制器介绍
\qquad exynos4412的LCD驱动程序接口支持三种接口。它们是RGB接口、间接i80接口和用于写回的YUV接口。显示控制器使用多达五个覆盖图像窗口,这些窗口支持各种颜色格式、256级alpha混合、颜色键、x-y位置控制、软滚动和可变窗口大小等。显示控制器支持各种颜色格式,如RGB(1到24BPP)和YCbCr 4:4:4(仅本地总线)。
\qquad 您可以对显示控制器进行编程,以支持屏幕上与水平和垂直像素数、数据接口的数据线宽、接口定时和刷新率相关的不同要求。
\qquad 显示控制器传输视频数据并生成必要的控制信号,例如RGB_VSYNC、RGB_HSYNC、RGB VCLK、RGB_VDEN、SYS_CS0、SYS_CS1和SYS_WE。除了生成控制信号外,显示控制器还包含视频数据的数据端口(RGB_VD[23:0]和SYS_VD)
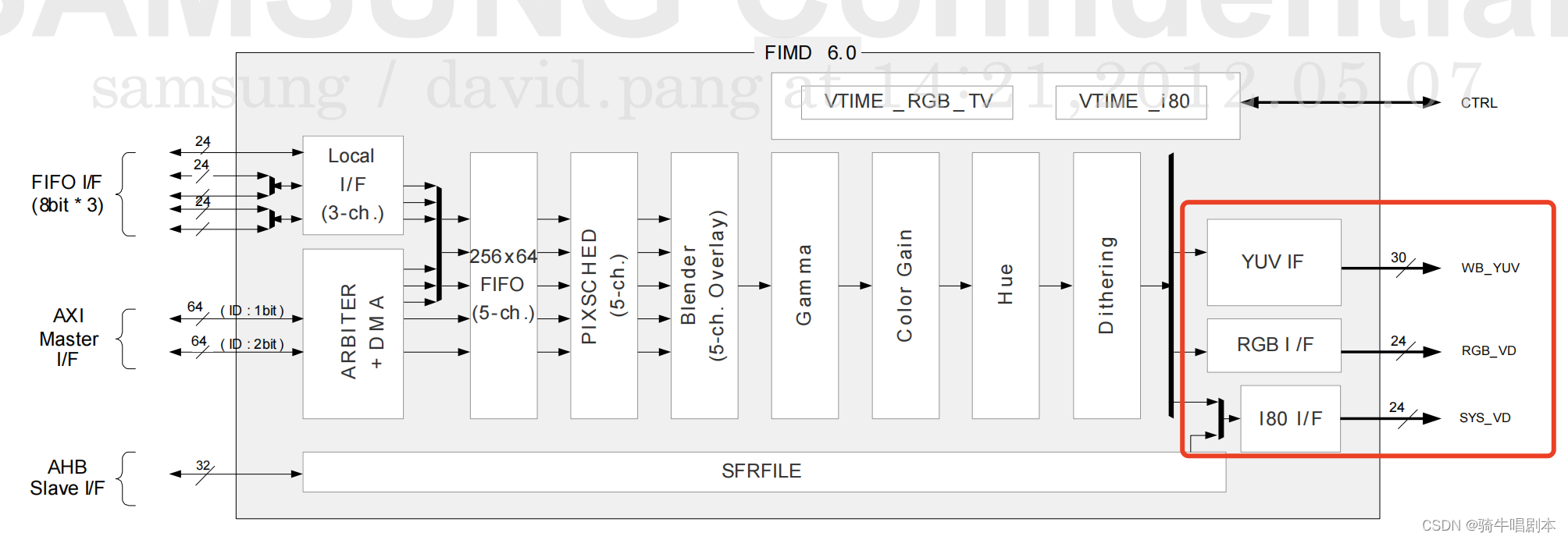
exynos4412可以支持红框中的三种接口形式。
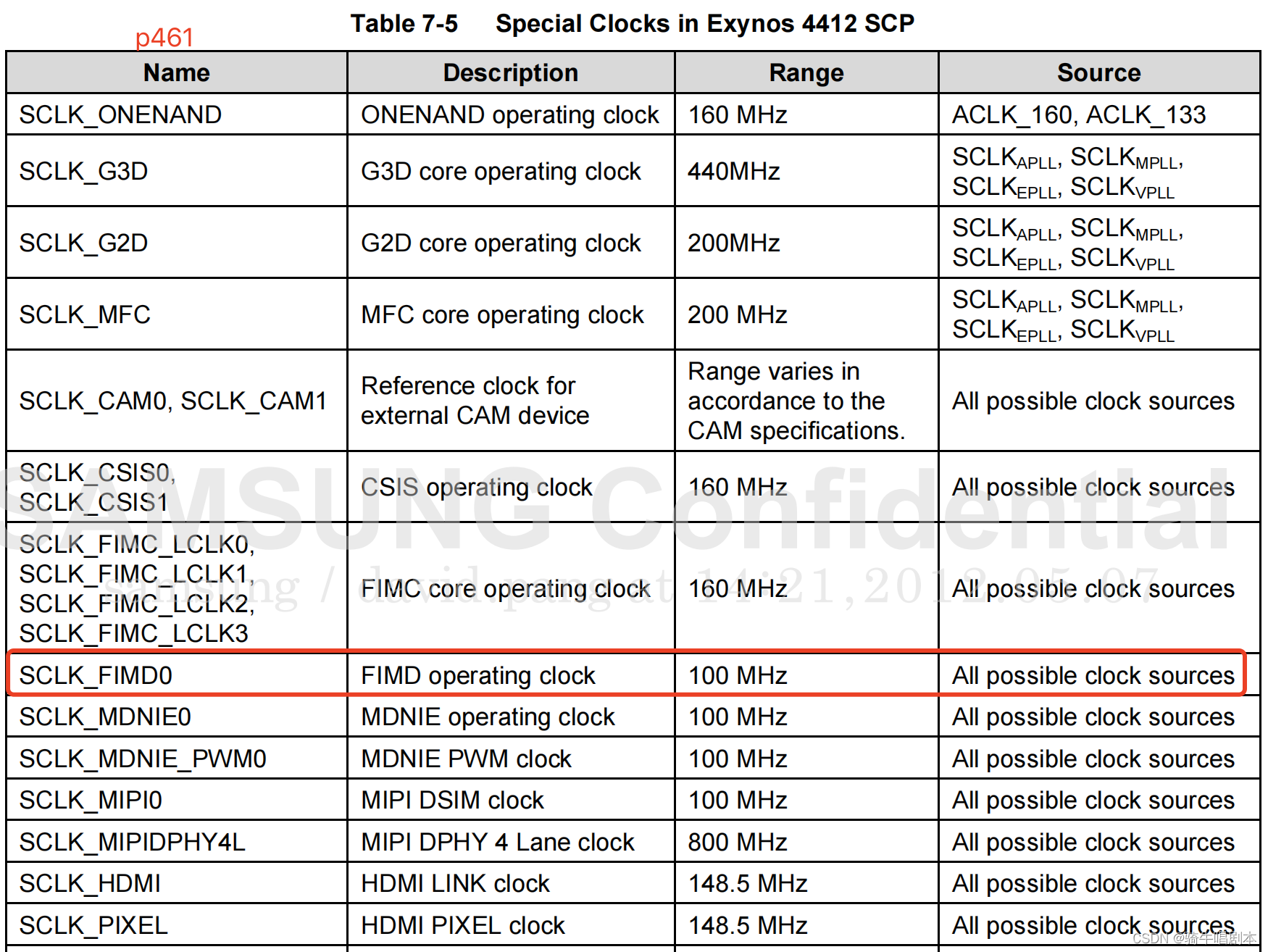
控制器的相关特性:
Maximum VCLK in RGB Interface 80MHz
Video Clock Source: SCLK_FIMD0 for display controller (from CMU module)
4.2 时钟
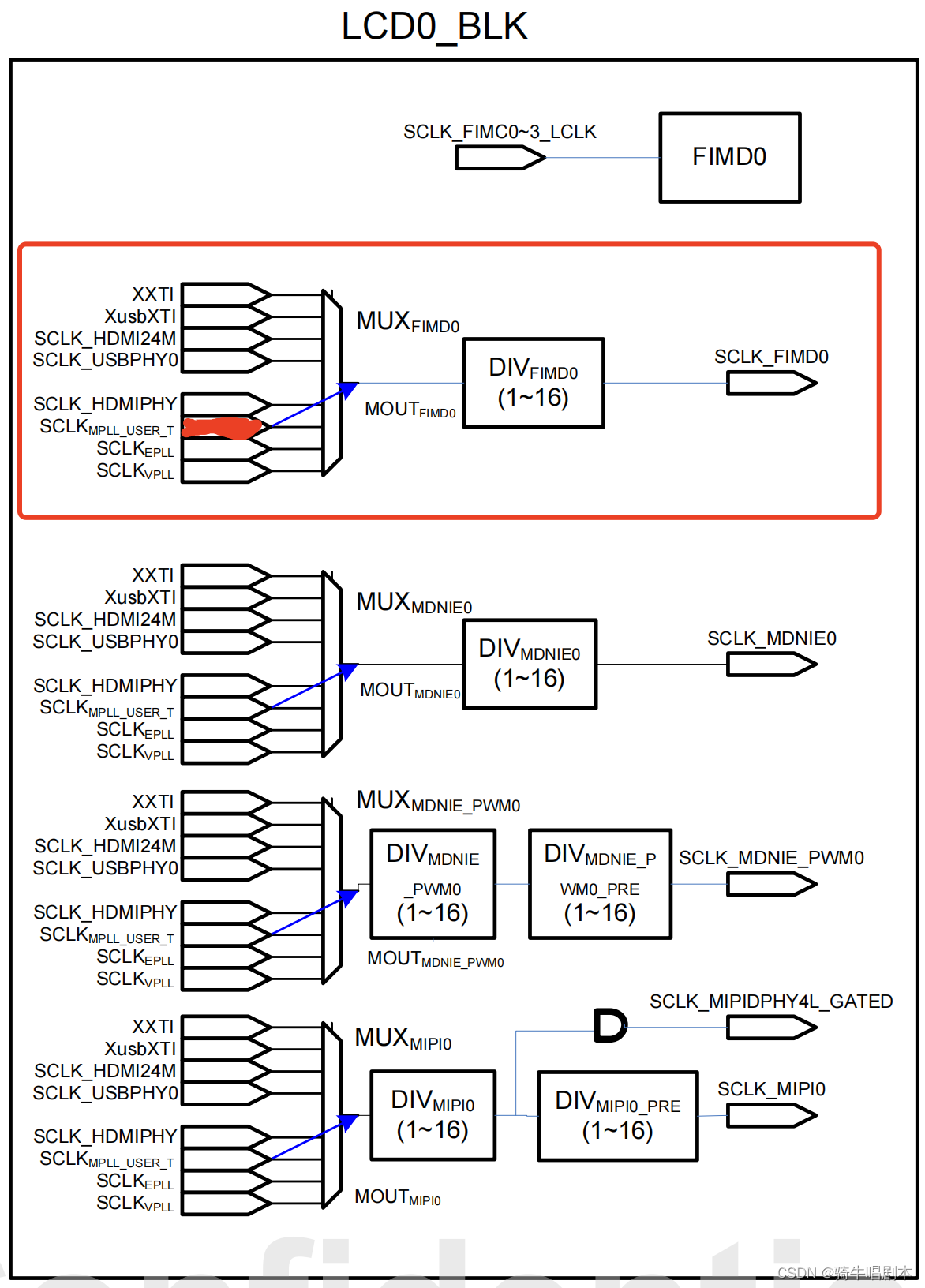
Exynos 4412 SCP时钟生成电路(特殊时钟)- lcd模块时钟:
4.3 RGB接口
4.3.1 RGB接口控制器
显示控制器由VSFR、VDMA、VPRCS、VTIME和视频时钟发生器组成。
要配置显示控制器,VSFR具有
- 121个可编程寄存器组
- 一个伽玛LUT寄存器组(64个寄存器)
- 一个i80命令寄存器组(12个寄存器)
- 五个 256 x 32个调色板存储器
VDMA是一种专用的显示DMA,用于将帧存储器中的视频数据传输到VPRCS。通过使用这种特殊的DMA,您可以在屏幕上显示视频数据,而无需CPU干预。
VPRCS从VDMA接收视频数据,并通过数据端口(RGB_VD或SYS_VD)将其发送到显示设备(LCD),在将视频数据更改为合适的数据格式后,例如,每像素8位模式(8BPP模式)或每像素16位模式(16BPP模式)。
VTIME由可编程逻辑组成,以支持不同LCD驱动器中常见的接口时序和速率的可变要求。TIME块生成RGB_VSYNC、RGB_HSYNC、RGB_VCLK、RGB_VDEN、VEN_VSYNC、VEN_HSYNC、VEN_FIELD、VEN_HREF、SYS_CS0、SYS_CS1、SYS_WE等。
使用显示控制器数据,可以通过设置LCDBLK_CFG寄存器(0x1001_0210)来选择上述数据路径之一。有关更多信息,请参阅“Chapter 12, System Register Controller, for more information.P884”手册。
VTIME生成用于RGB接口的控制信号,例如RGB_VSYNC、RGB_HSYNC、RGB VDEN和RGB_VCLK信号。在VSFR寄存器中配置VIDTCON0/1/2寄存器时,可以使用这些控制信号。
您可以在VSFR中对显示控制寄存器的配置进行编程。然后,VTIME模块生成支持不同类型显示设备的可编程控制信号。
RGB_VSYNC信号使LCD行指针从显示器顶部开始。HOZVAL字段和LINEVAL寄存器的配置控制RGB_VSYNC和RGB_HSYNC的脉冲生成。基于这些方程,LCD面板的尺寸决定了HOZVAL和LINEVAL:
VIDCON0寄存器中的CLKVAL字段控制RGB_VCLK信号的速率。
CLKVAL的最小值为1。有公式:

其中,SCLK_FIMDx(x=0,1)
计算帧速率的方程式为:

4.3.2 RGB接口规范
RGB接口规范包括:
- 信号
- LCD RGB接口时序
- 并行输出
- 串行8位输出
- 输出配置结构
4.3.3 信号

4.3.4 LCD RGB接口时序
4.4 寄存器
LCD控制器的使用,全部依赖对其提供的寄存器的设置。因此,在开发lcd驱动程序时,必须根据情况去设置寄存器才能使LCD正常工作。因此,以下对LCD所使用的寄存器进行一一的介绍。
4.4.1 寄存器概况
LCD控制器直接操作的寄存器很多,但主要有以下这些。其中的x指代0,1,2…等数值,在使用时要注意区分。
可用于配置显示控制器的寄存器有:
1.VIDCON0:配置视频输出格式并显示启用/禁用。
2.VIDCON1:指定RGB I/F控制信号。
3.VIDCON2:指定输出数据格式控制。
4.VIDCON3:指定图像增强控制。
5.I80IFCONx:指定CPU接口控制信号。
6.VIDTCONx:配置视频输出时序并确定显示器的大小。
7.WINCONx:指定每个窗口功能设置。
8.VIDOSDxA,VIDOSDxDB:指定窗口位置设置。
9.VIDOSDxC,D:指定屏幕显示(OSD)大小设置。
10.VIDWxALPHA0/1:指定alpha值设置。
11.BLENDEQx:指定混合方程式设置。
12.VIDWxxADDx:指定源映像地址设置。
13.WxKEYCONx:指定颜色键设置寄存器。
14.WxKEYALPHA:指定颜色键alpha值设置。
15.WINxMAP:指定窗口颜色控制。
16.GAMMALUT_xx:指定伽玛值设置。
17.COLORGAINCON:指定颜色增益值设置。
18.HUExxx:指定色调系数和偏移值设置。
19.WPALCON:指定调色板控制寄存器。
20.WxRTQOSCON:指定RTQoS控制寄存器。
21.WxPDATAxx:指定每个索引的窗口选项板数据。
22.SHDOWCON:指定卷影控制寄存器。
23.WxRTQOSCON:指定QoS控制寄存器。
4.4.2 寄存器使用详述
这些详细说明的寄存器,都是在LCD驱动中要用到的。
4.4.2.2 时钟寄存器
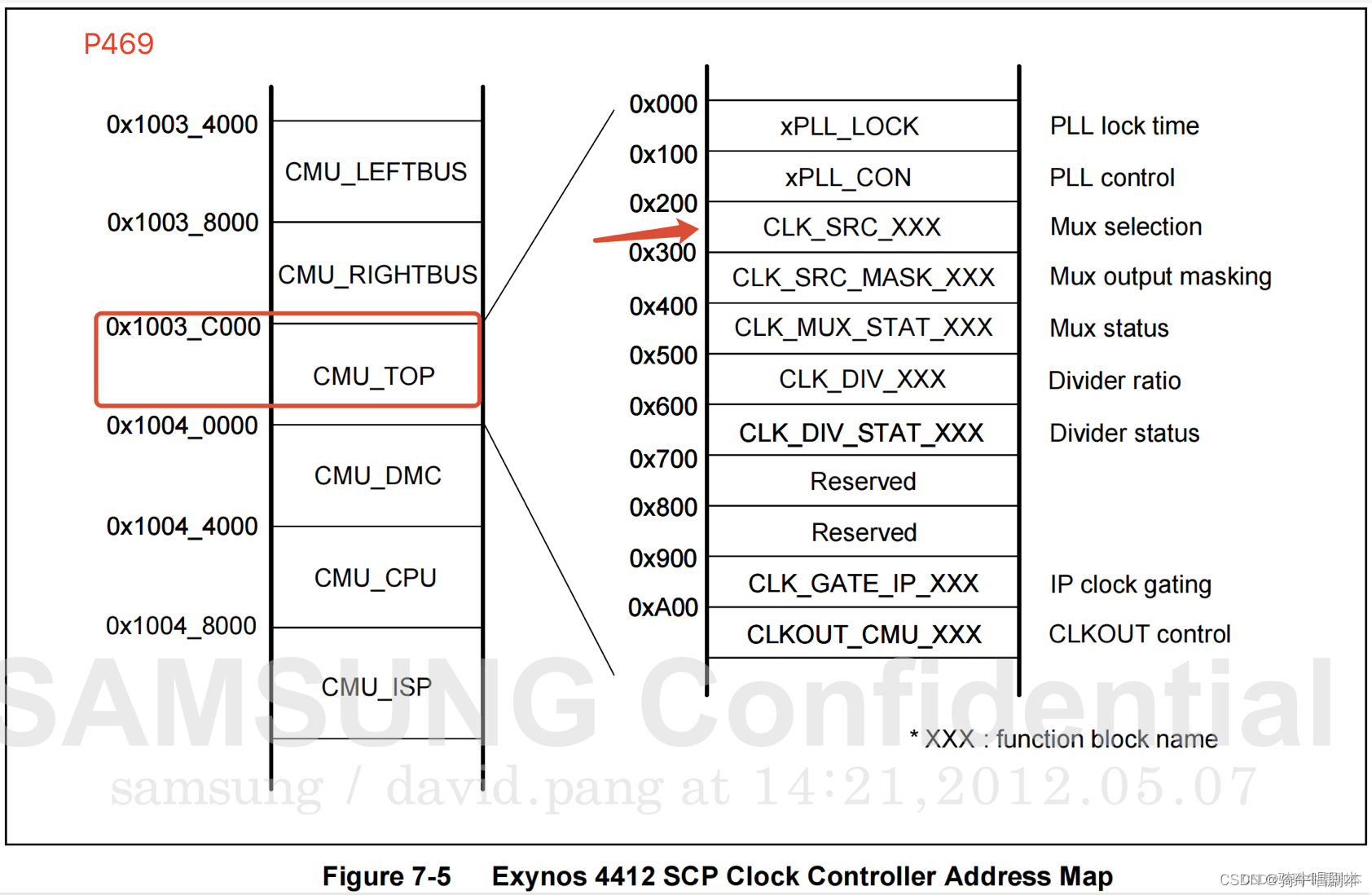
时钟寄存器是属于系统的时钟的部分,其中涉及到LCD的部分时钟寄存器如下表,基地址为0x1003_C000:
以下为必须要用到的寄存器的详细用法。
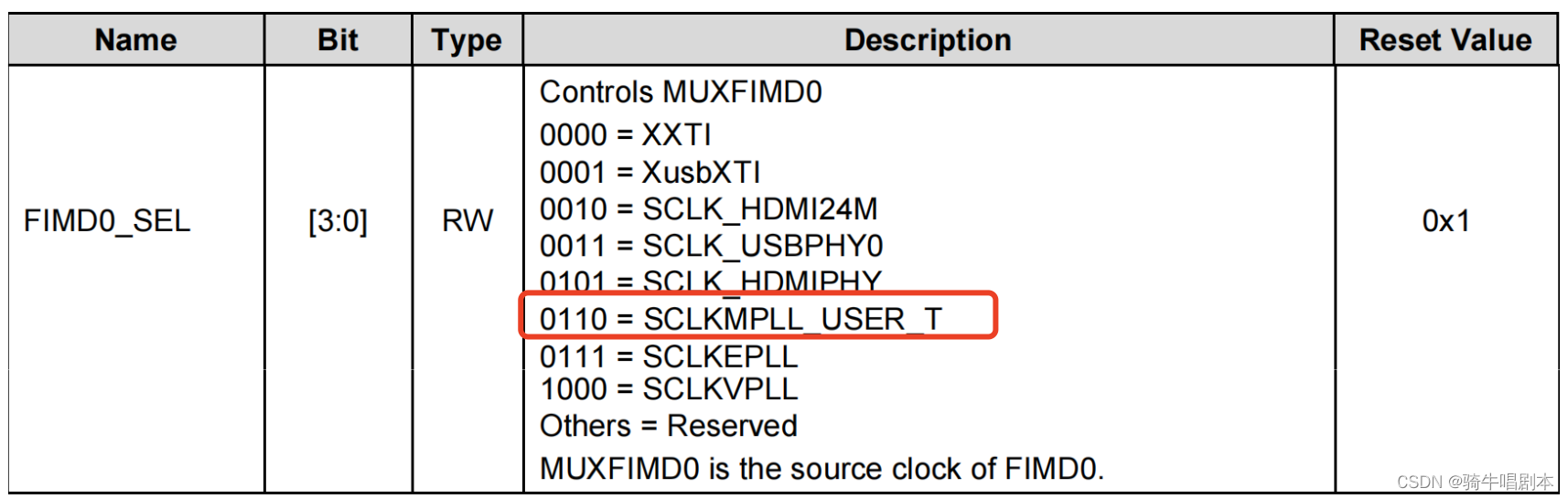
CLK_SRC_LCD0 (P505)
Base Address: 0x1003_0000
Address = Base Address + 0xC234, Reset Value = 0x0000_1111
作用:为LCD_BLK选择时钟源
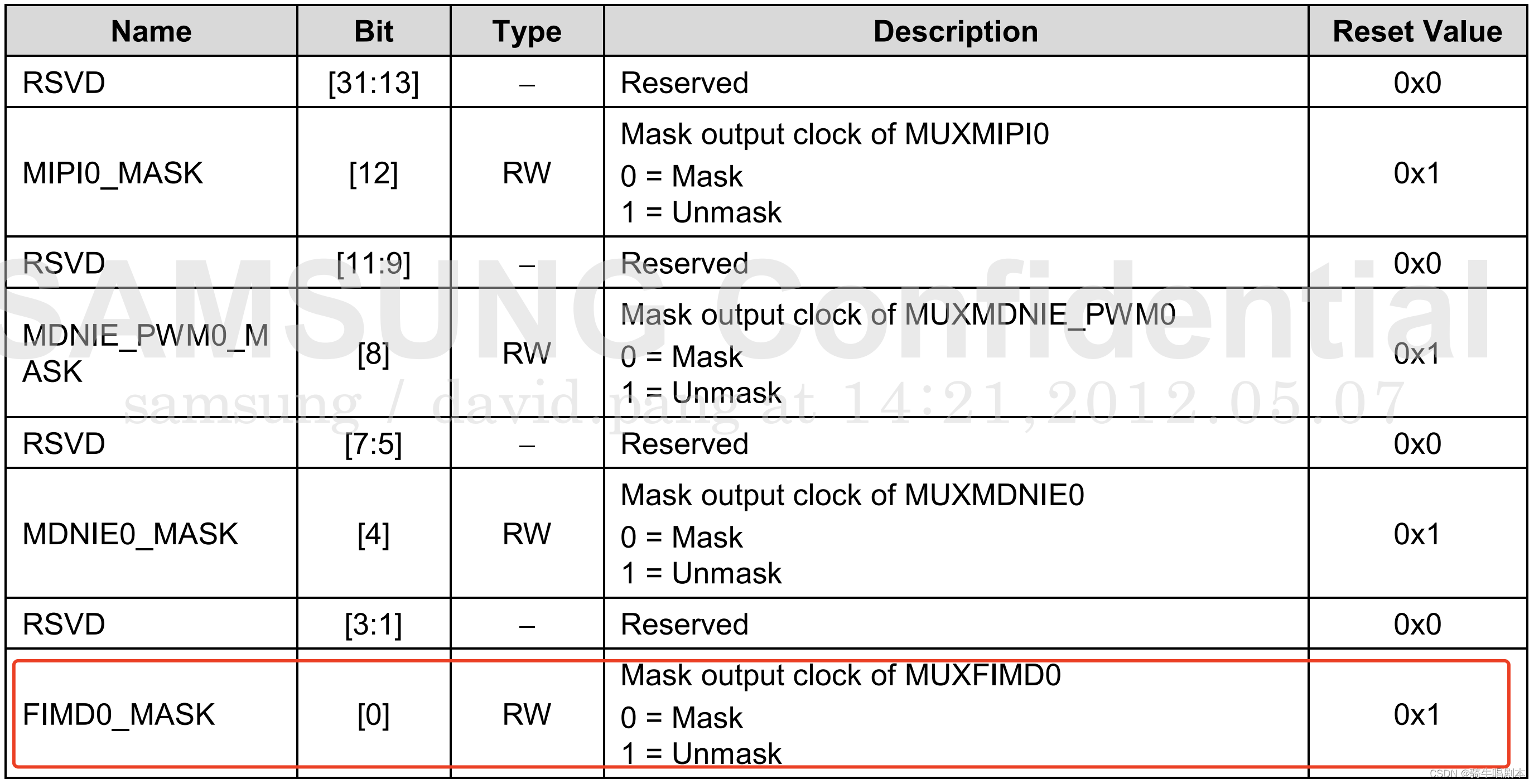
CLK_SRC_MASK_LCD
Base Address: 0x1003_0000
Address = Base Address + 0xC334, Reset Value = 0x0000_1111
作用:LCD BLK的时钟源掩码。如果希望使用外部时钟源来驱动LCD控制器,可以设置CLK_SRC_MASK_LCD寄存器的相应位为1,将其它位设置为0
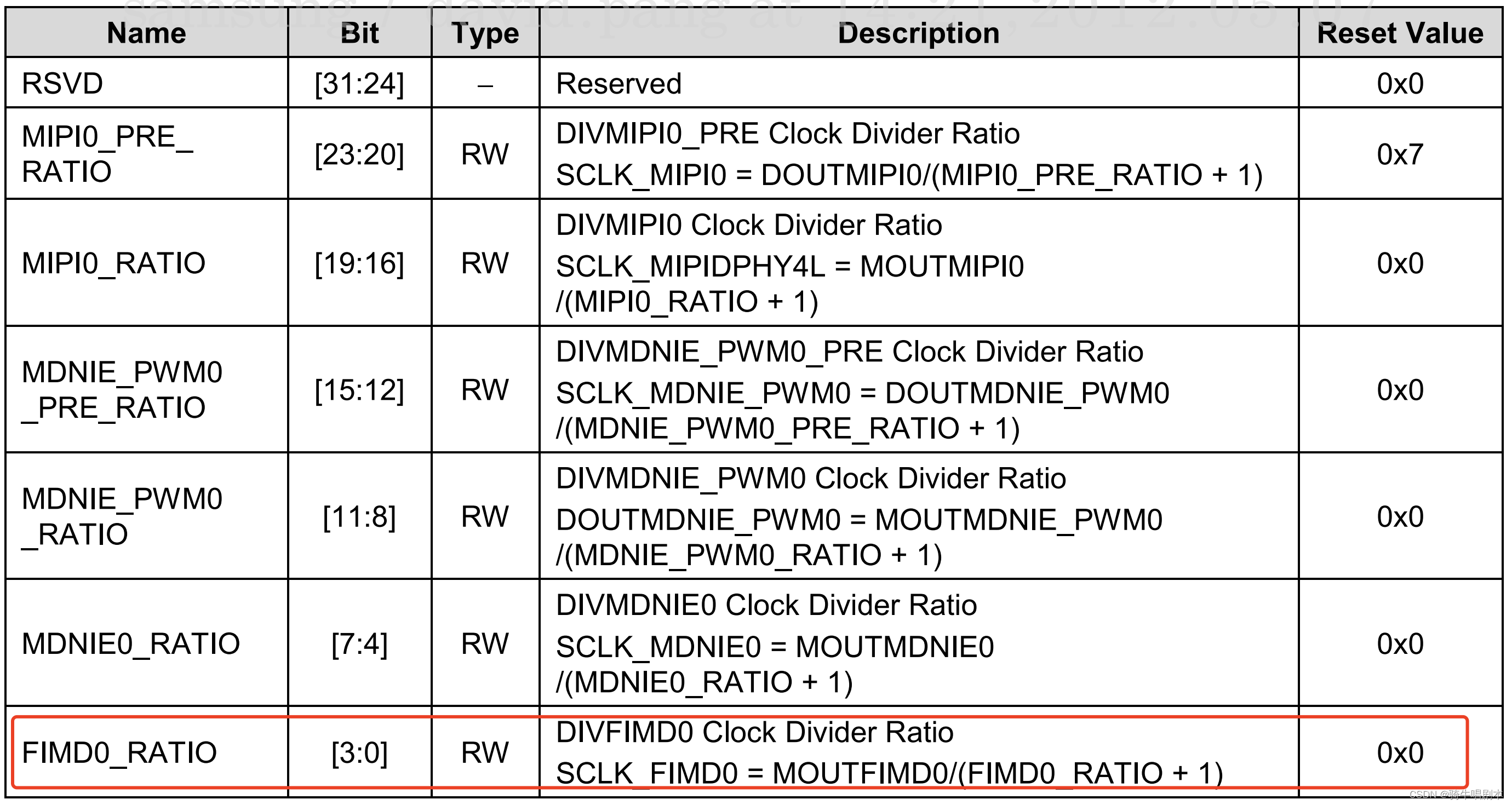
CLK_DIV_LCD (P530)
Base Address: 0x1003_0000
Address = Base Address + 0xC534, Reset Value = 0x0070_0000
作用:设置LCD BLK的时钟分频比
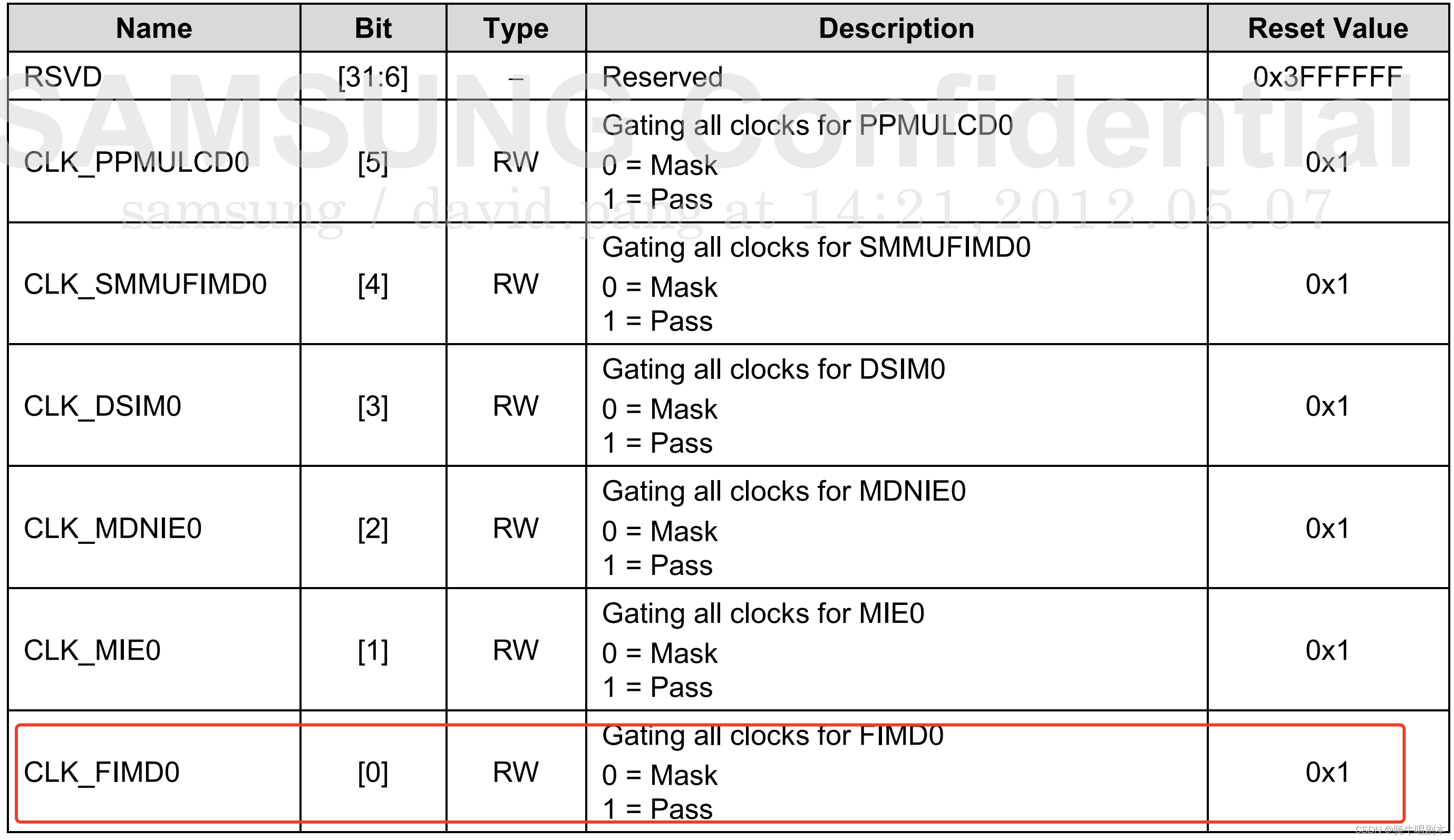
CLK_GATE_IP_LCD (P556)
Base Address: 0x1003_0000
Address = Base Address + 0xC934, Reset Value = 0xFFFF_FFFF
作用:控制LCD BLK的IP时钟门控。设置为1时,表示使能LCD控制器的时钟;设置为0时,表示关闭LCD控制器的时钟。
4.4.2.3 系统寄存器
LCDBLK_CFG (P884)
Base Address: 0x1001_0000
Address = Base Address + 0x0210, Reset Value = 0x00F8_0000
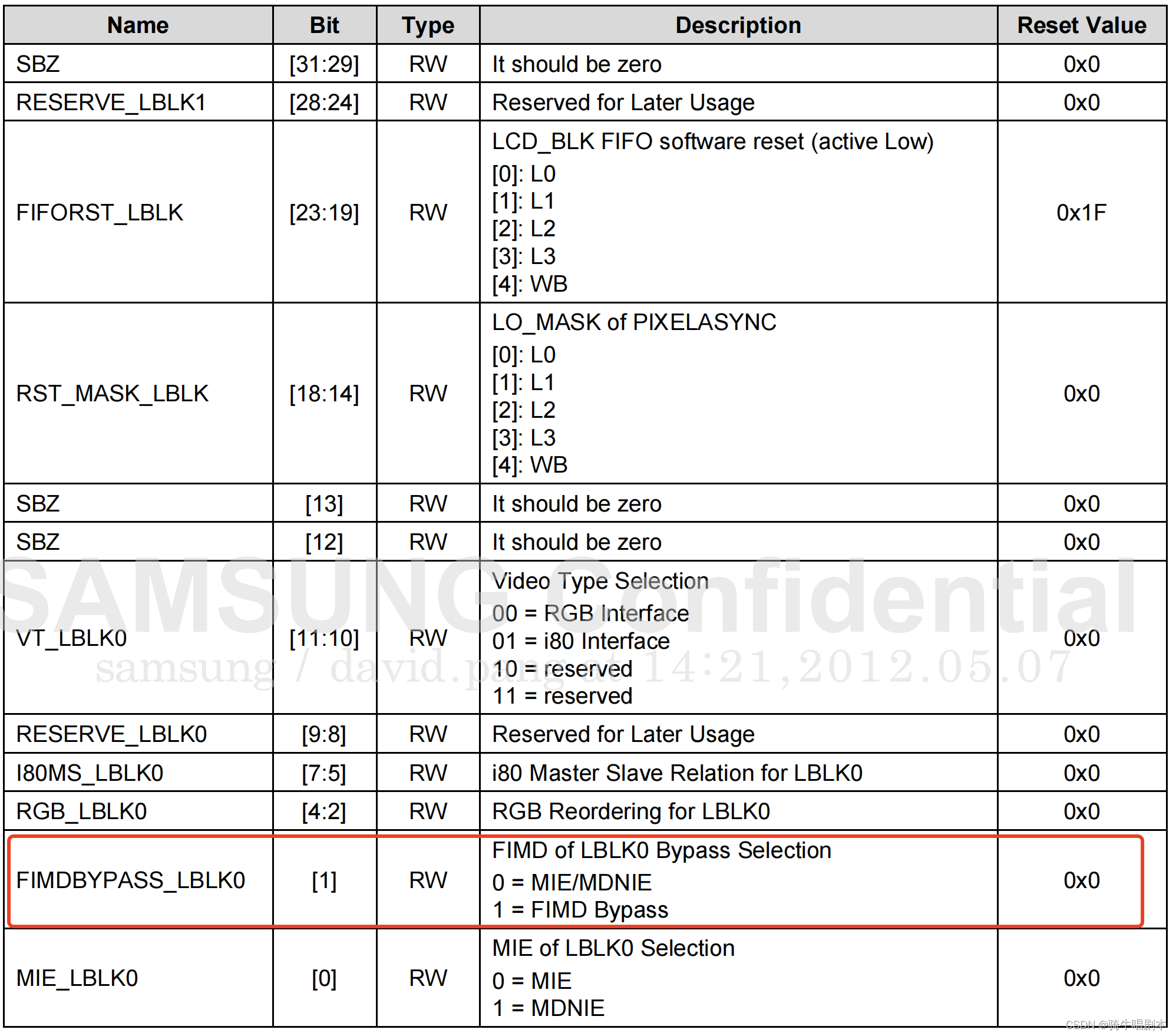
寄存器lcdblk_cfg是Exynos4412芯片中与LCD控制器背光控制相关的寄存器。该寄存器用于配置和控制LCD控制器背光的工作方式和参数。
- fimdbypass_lblk0: 用于配置背光控制是否绕过FIMD(Framebuffer Interface Module Display)模块。设置为1时,表示绕过FIMD模块,背光控制由外部电路或外部控制器进行;设置为0时,表示背光控制由FIMD模块进行。
LCDBLK_CFG2 (P886)
Base Address: 0x1001_0000
Address Base Address + 0x0214, Reset Value = 0x0000_0001
4.4.2.4 LCD控制寄存器
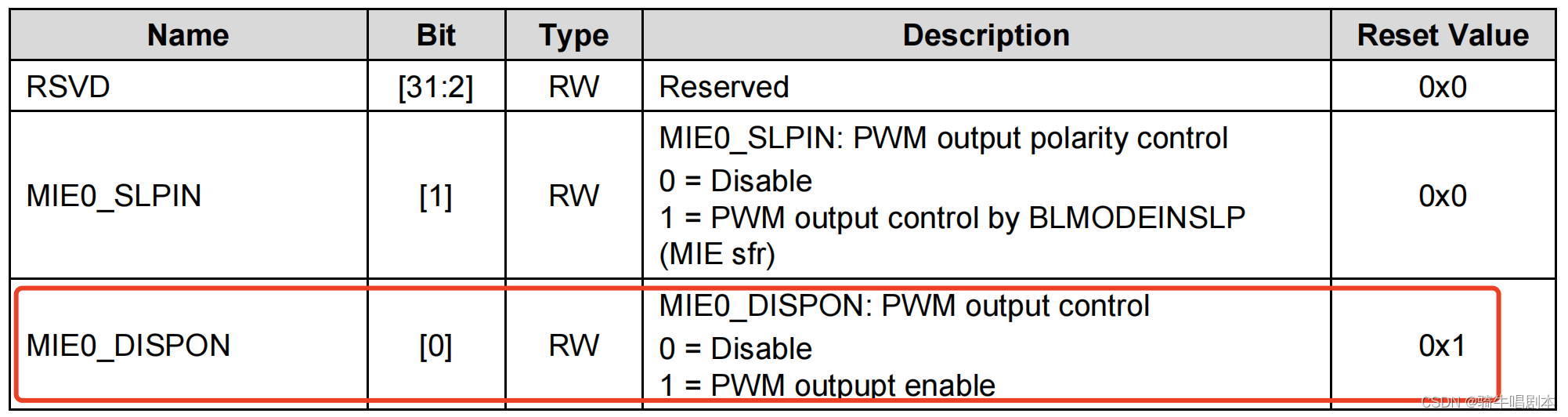
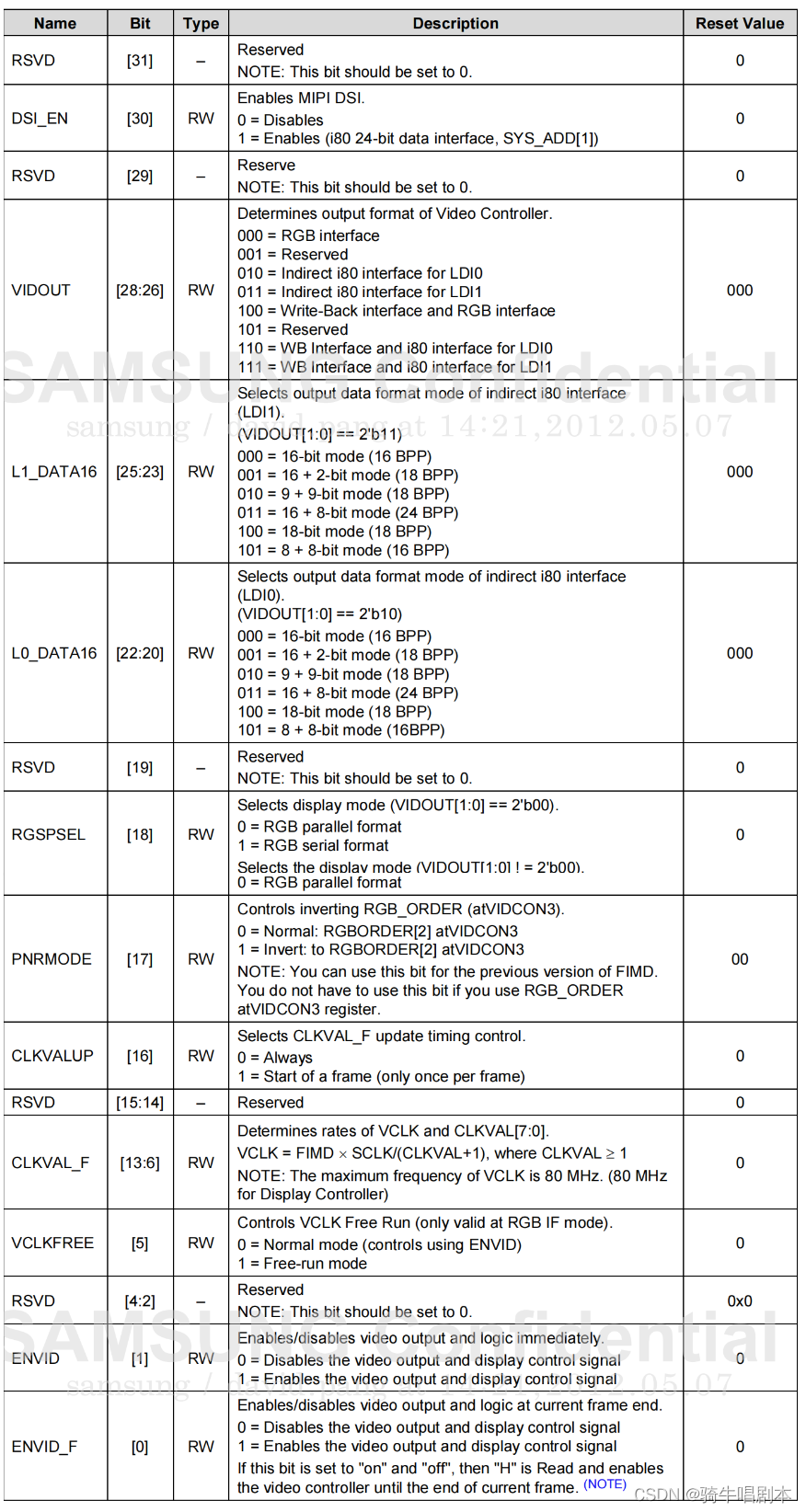
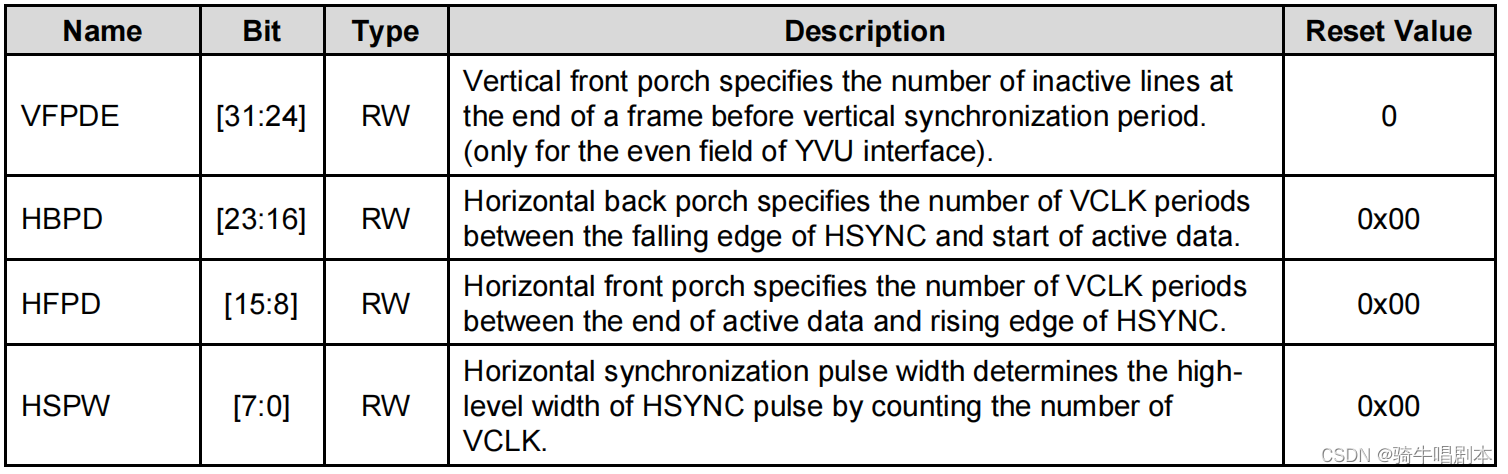
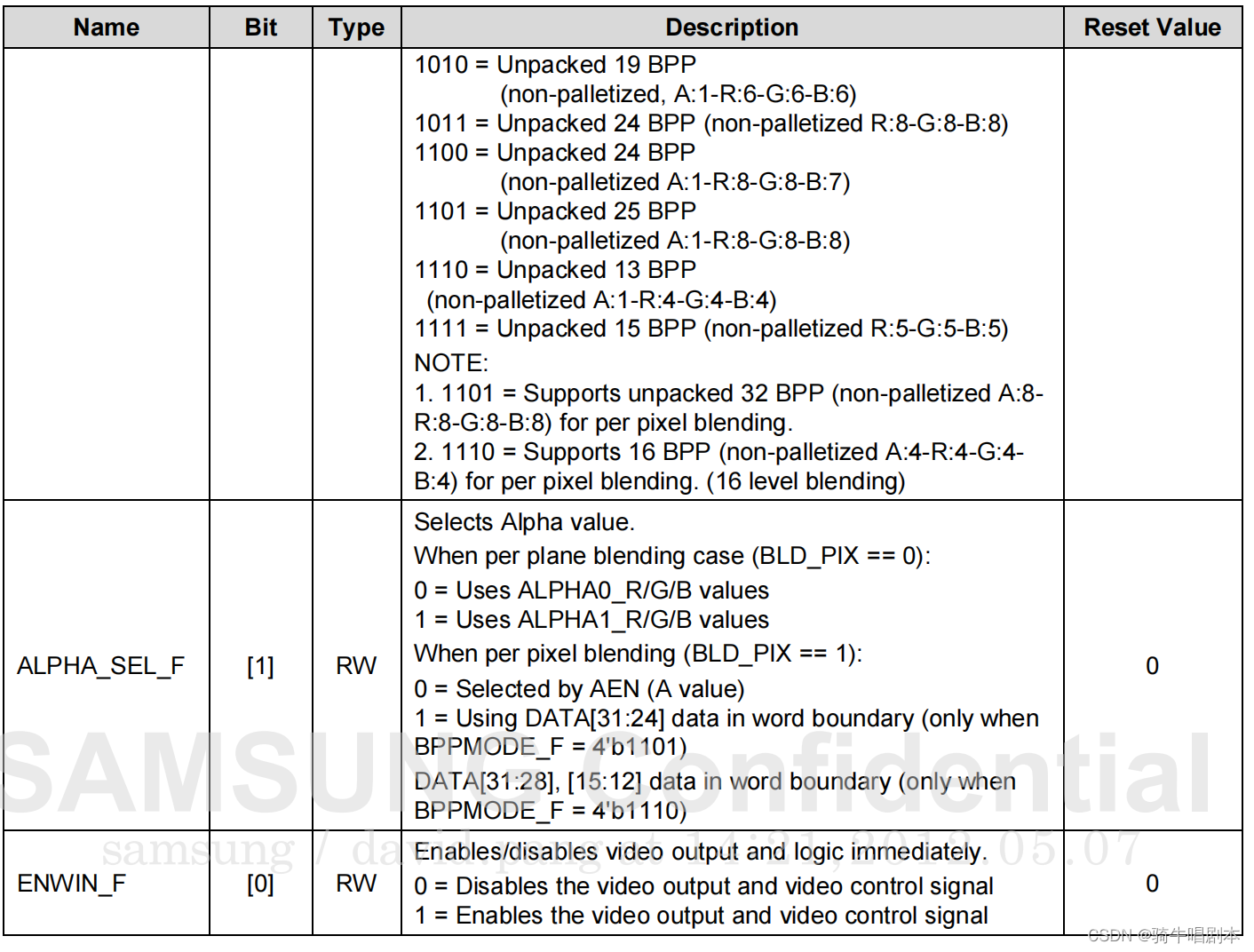
VIDCON0 (P1838)
Base Address = 0x11C0_0000
Address = Base Address + 0x0000, Reset Value = 0x0000_0000
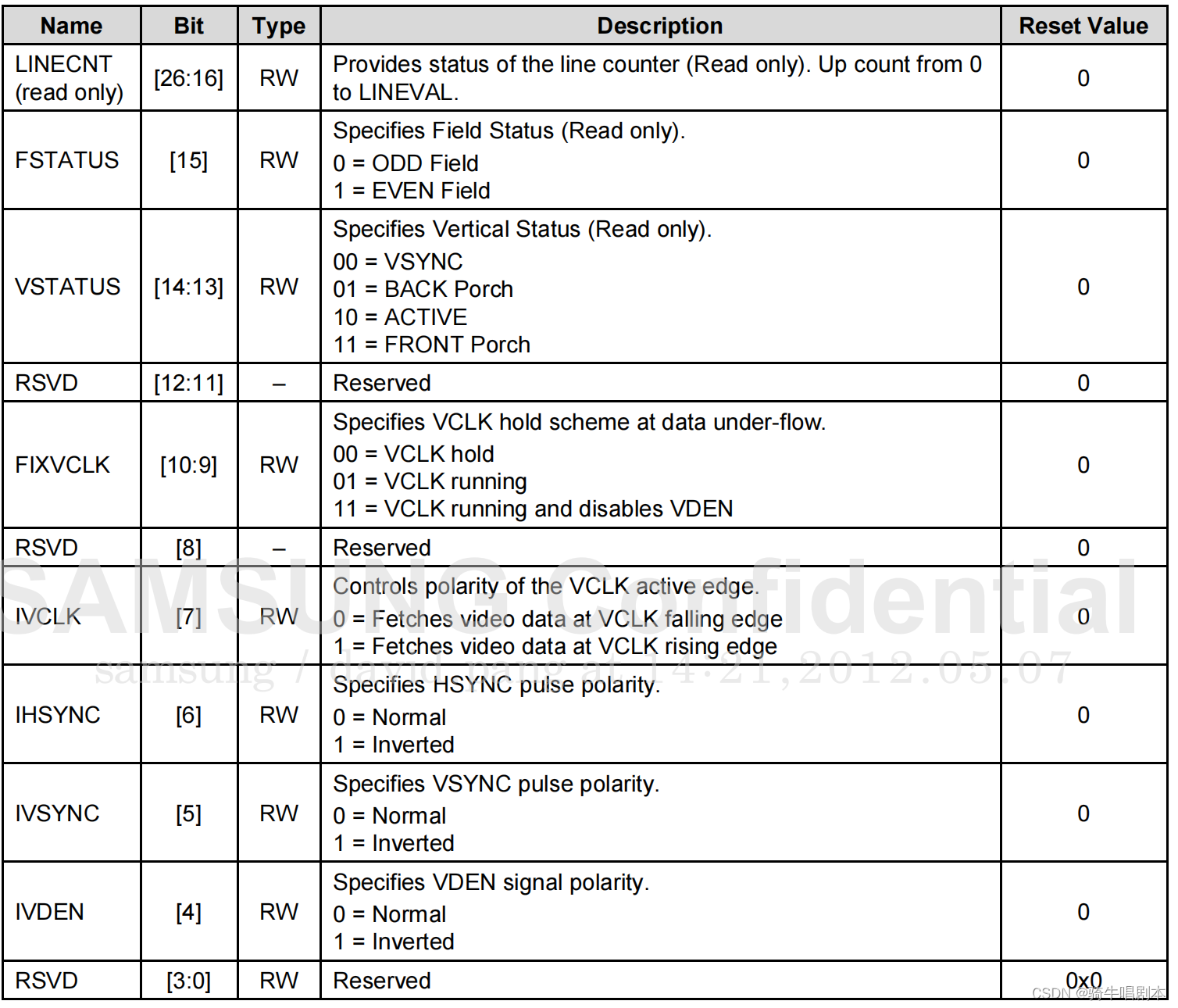
VIDCON1 (P1839)
Base Address = 0x11C0_0000
Address = Base Address + 0x0004, Reset Value = 0x0000_0000
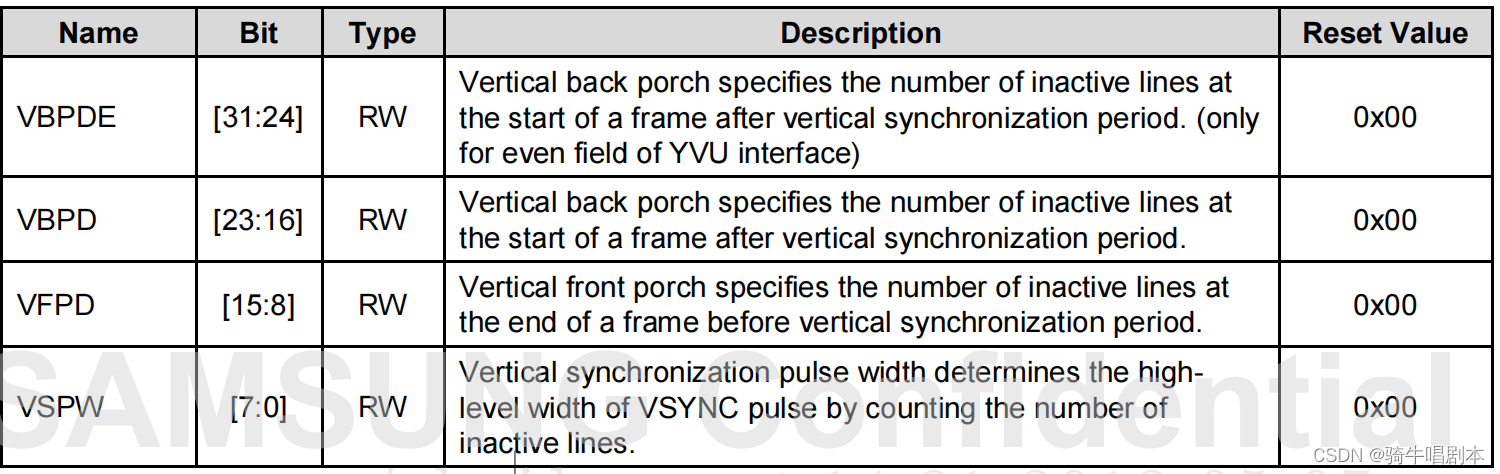
VIDTCON0 (P1842)
Base Address = 0x11C0_0000
Address = Base Address + 0x0010, Reset Value = 0x0000_0000
VIDTCON1
Base Address = 0x11C0_0000
Address = Base Address + 0x0014, Reset Value = 0x0000_0000
VIDTCON2 (P1843)
Base Address = 0x11C0_0000
Address = Base Address + 0x0018, Reset Value = 0x0000_0000

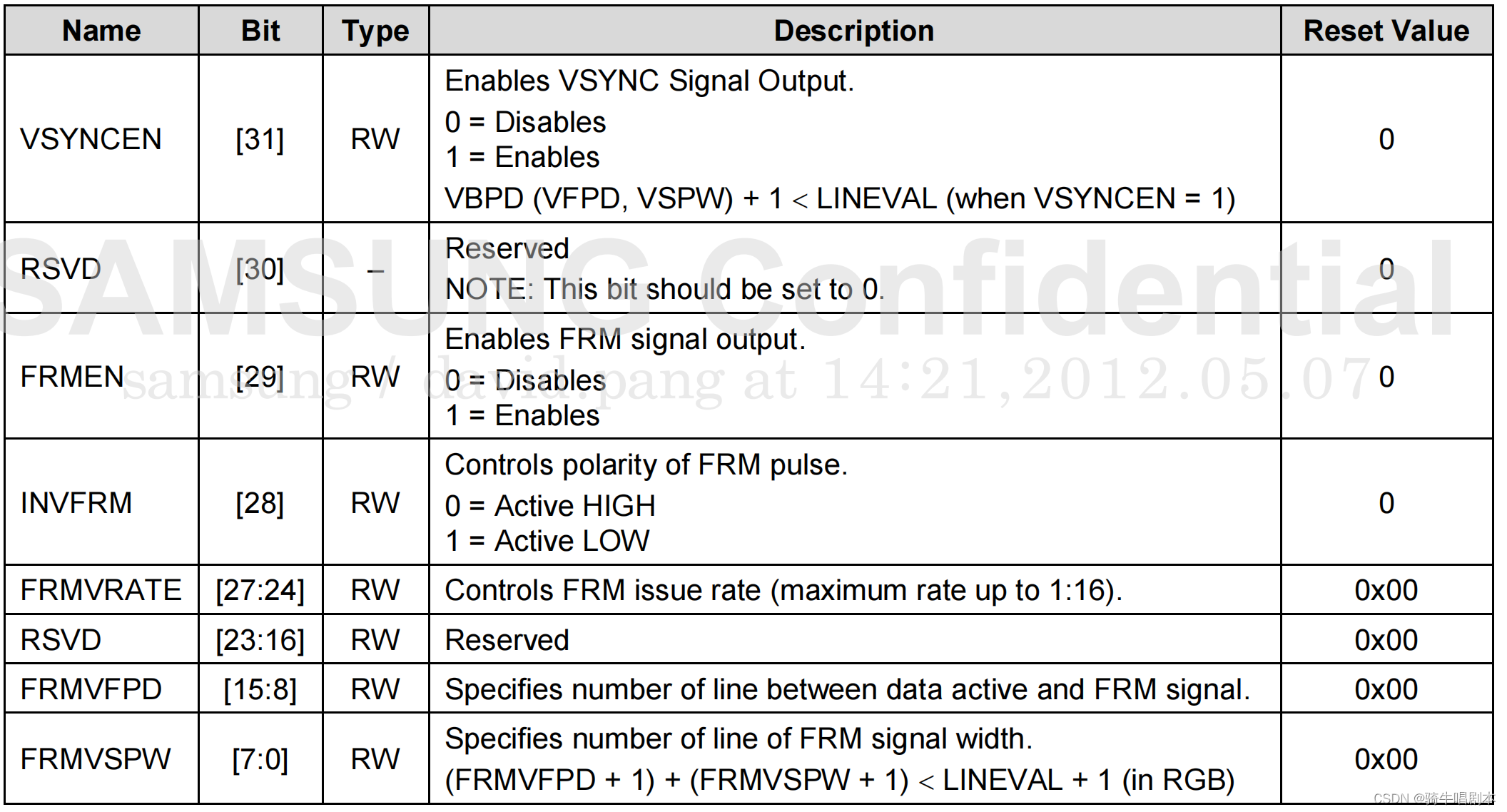
VIDTCON3 (P1843)
Base Address = 0x11C0_0000
Address = Base Address + 0x001C, Reset Value = 0x0000_0000
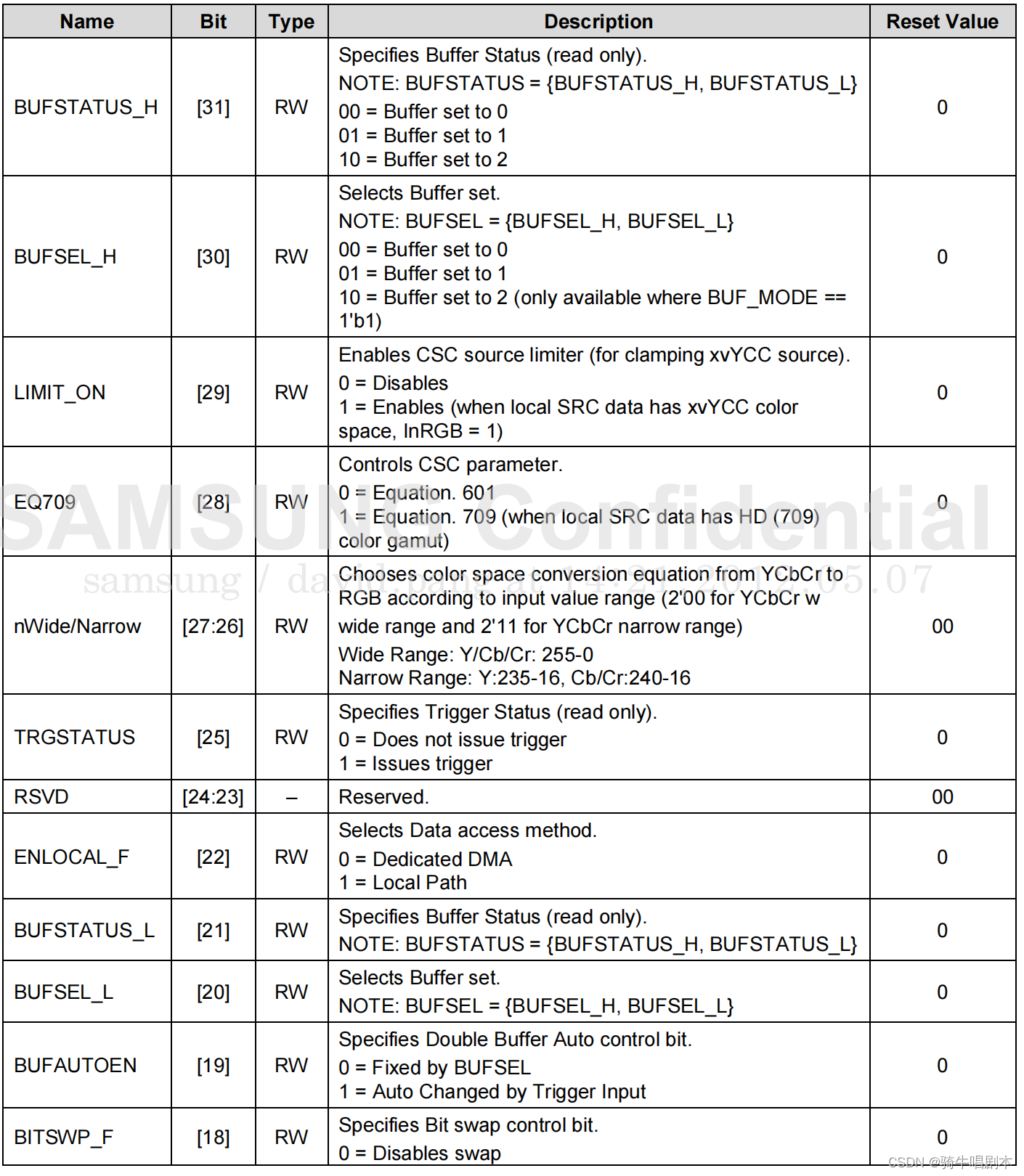
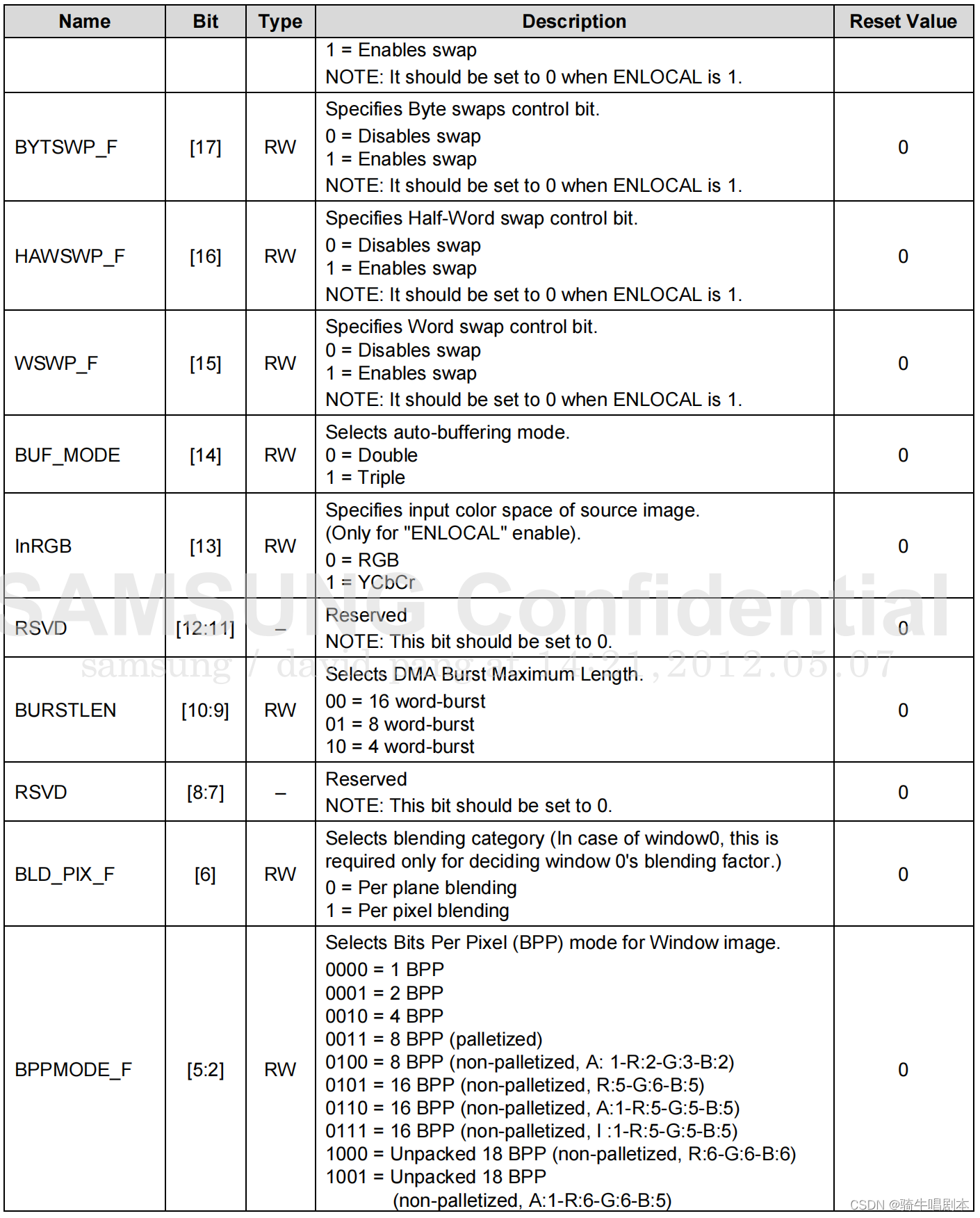
WINCON0 (P1844)
Base Address = 0x11C0_0000
Address = Base Address + 0x0020, Reset Value = 0x0000_0000
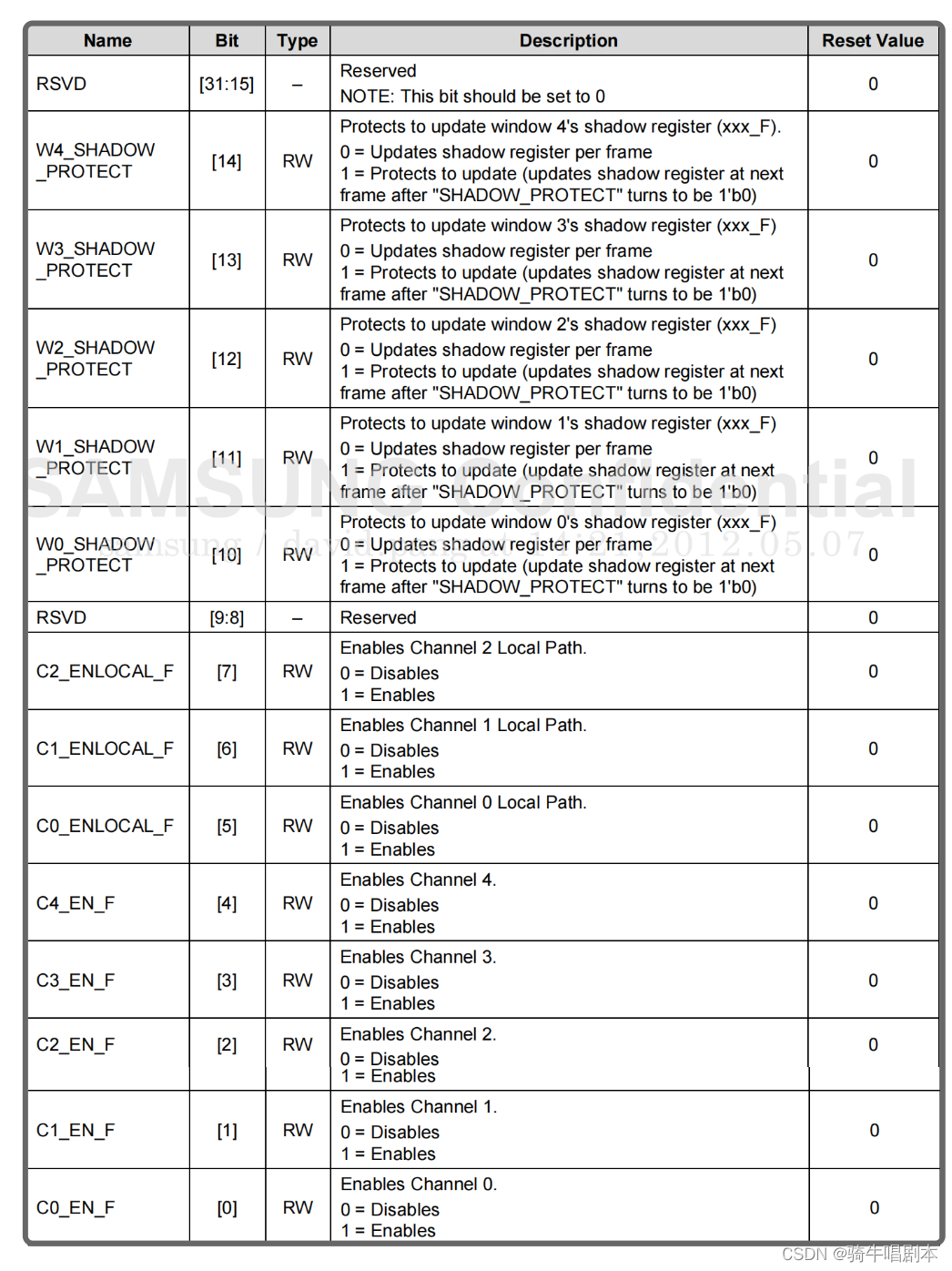
SHADOWCON (P1859)
Base Address = 0x11C0_0000
Address = Base Address + 0x0034, Reset Value = 0x0000_0000
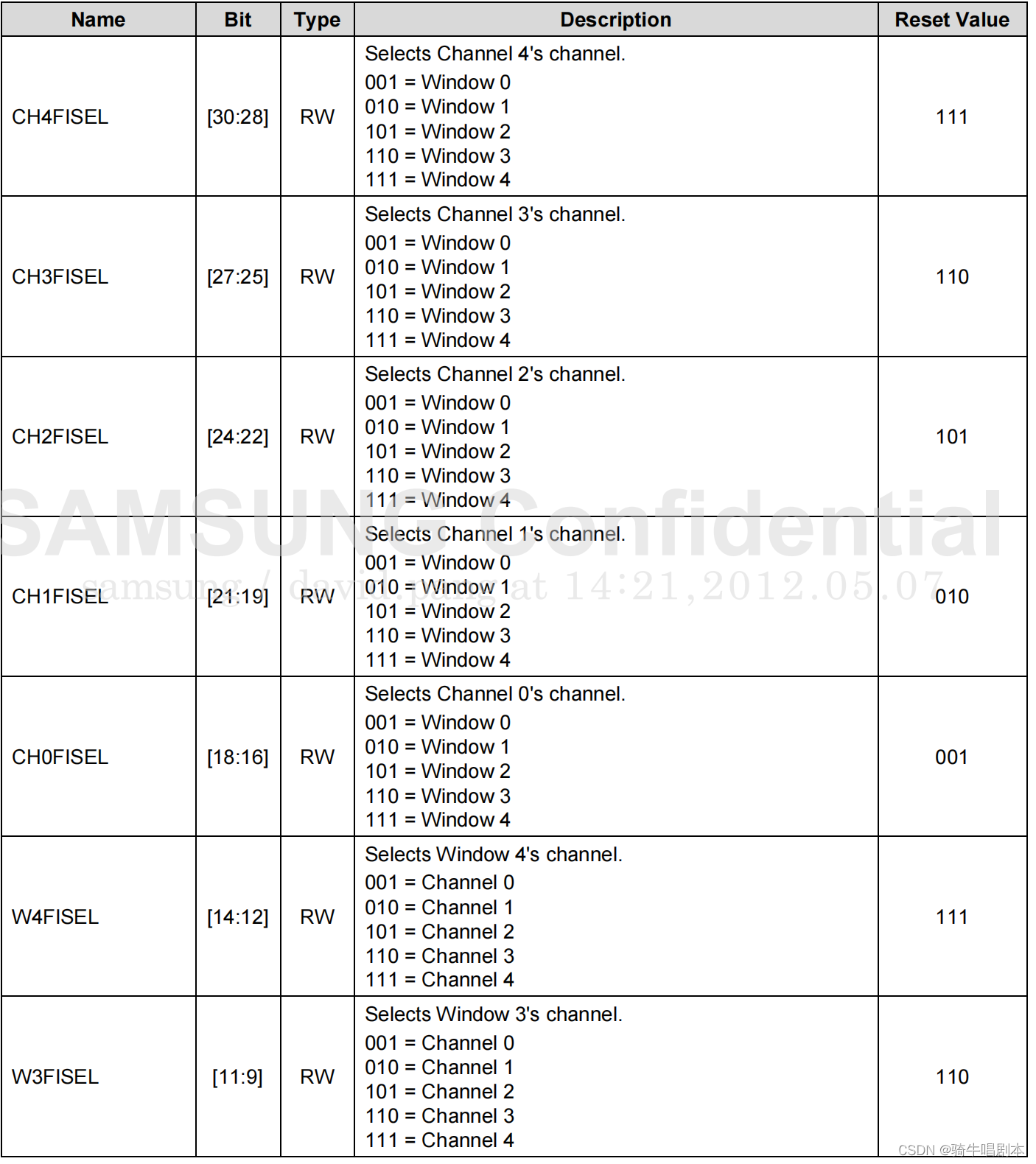
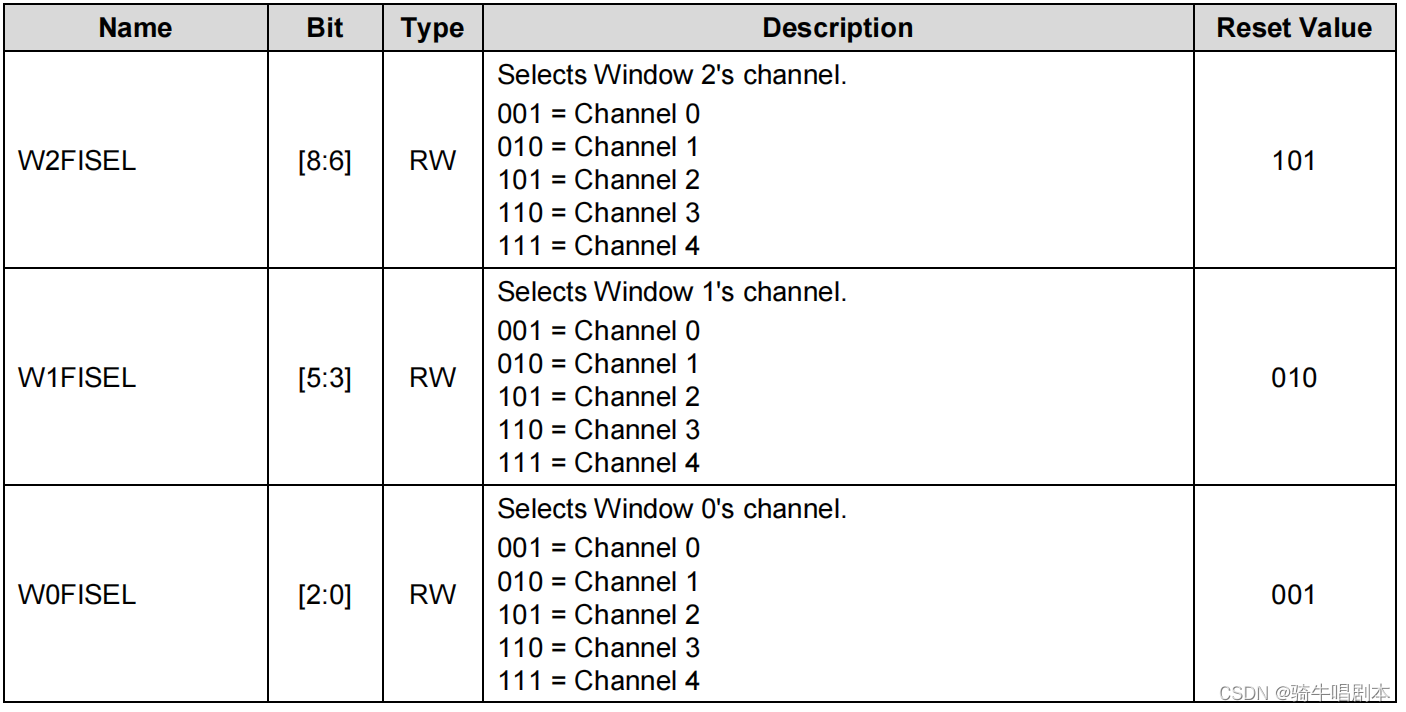
WINCHMAP2
Base Address = 0x11C0_0000
Address = Base Address + 0x003C, Reset Value = 0x7D51_7D51
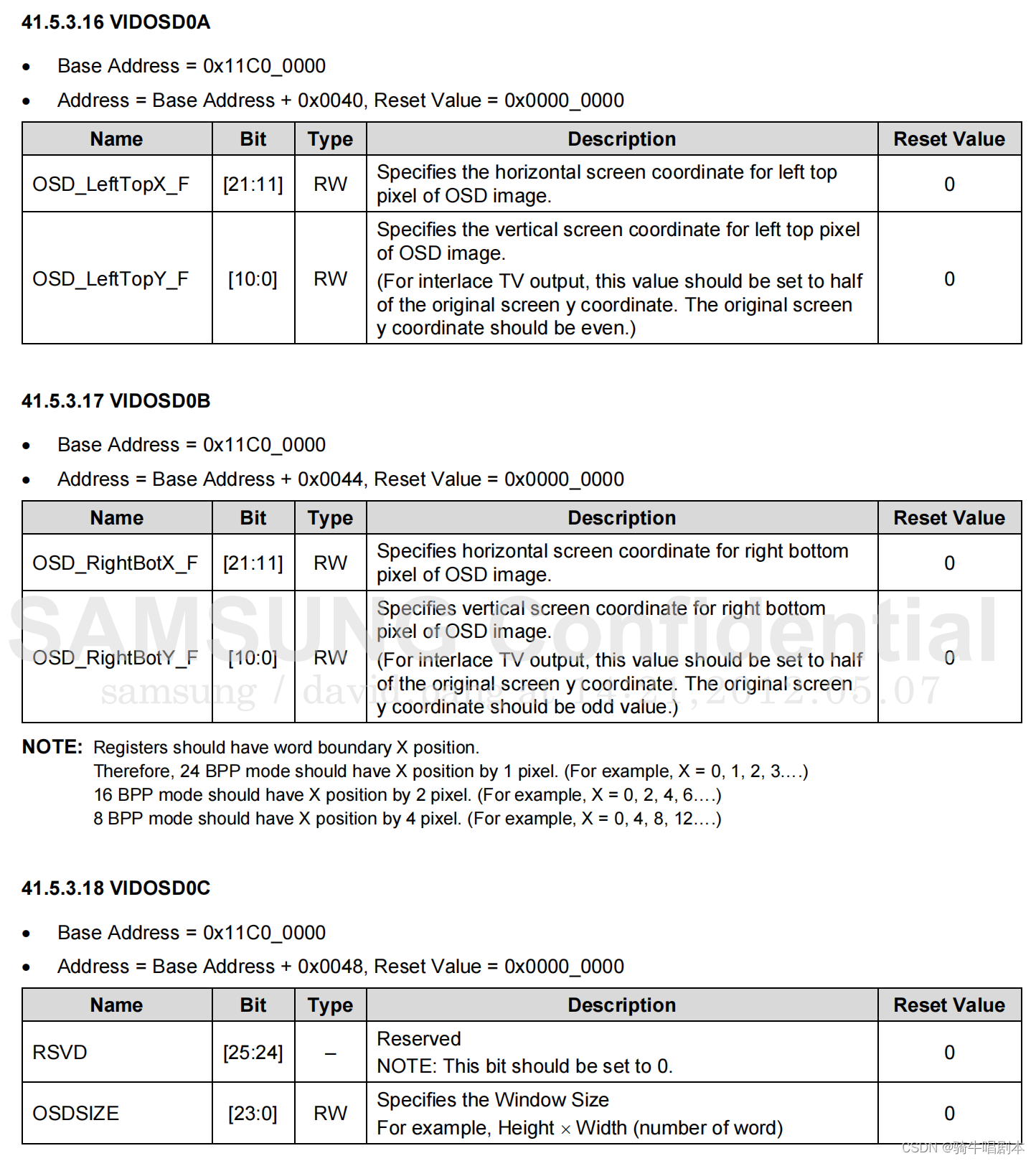
VIDOSD0A VIDOSD0B VIDOSD0C(P1863)
VIDOSD0A:用于配置视频显示层0的位置和大小。通过设置该寄存器的位字段,可以指定视频显示层0在屏幕上的位置和大小。
•
VIDOSD0B:用于配置视频显示层0的颜色控制。通过设置该寄存器的位字段,可以调整视频显示层0的颜色属性,例如亮度、对比度、饱和度等。
•
VIDOSD0C:用于配置视频显示层0的混合模式和透明度。通过设置该寄存器的位字段,可以指定视频显示层0的混合模式(例如覆盖、叠加等)以及透明度。
这些寄存器的区别在于它们分别用于配置视频显示层的不同方面。VIDOSD0A用于配置位置和大小,VIDOSD0B用于配置颜色控制,VIDOSD0C用于配置混合模式和透明度。
4.4.2.5 电源管理寄存器
9 LCD0_CONFIGURATION
Base Address: 0x1002_0000
Address = Base Address + 0x3C80, Reset Value = 0x0000_0007
作用:配置LCD0的电源模式

5、结语
\qquad 到此,有了以上的知识准备,接下来就可以开始进行LCD驱动程序的开发了。在下一篇中,我们将讲述linux3.14中的LCD驱动的FrameBuffer框架相关内容。
相关文章:
【嵌入式环境下linux内核及驱动学习笔记-(18)LCD驱动框架1-LCD控制原理】
目录 1、LCD显示系统介绍1.1 LCD显示基本原理1.1.1 颜色的显示原理:1.1.2 图像的构成 1.2 LCD接口介绍1.2.1 驱动接口 - MCU接口1.2.2 驱动接口 - RGB接口1.2.3 驱动接口 - LVDS接口1.2.4 驱动接口 - MIPI接口1.2.5 RGB / MIPI / LVDS三种接口方式的区别:…...
【unity】ShaderGraph实现等高线和高程渐变设色
【unity】ShaderGraph实现等高线和高程渐变设色 等高线的实现思路 方法一: 通过Position节点得到顶点的高度(y)值,将高度值除去等高距离取余,设定余数的输出边界(step) 方法二: 将…...
快速修复应用程序中的问题的利器—— Android热修复
热修复技术在Android开发中扮演着重要的角色,它可以帮助开发者在不需要重新发布应用程序的情况下修复已经上线的应用程序中的bug或者添加新的功能。 一、热修复是什么? 热修复(HotFix)是一种在运行时修复应用程序中的问题的技术…...

什么是全局代理,手机怎么设置全局代理
目录 什么是全局代理 全局代理的优缺点 优点 缺点 手机怎么设置全局代理 注意事项 总结 在计算机网络和信息安全中,全局代理是一种常用的技术手段,用于将网络流量通过代理服务器进行转发和处理。本文将介绍什么是全局代理,探讨全局代理…...

技术领先产品ASSAR300一一基于SAR成像的角雷达产品,助力自动泊车
作为自动驾驶应用场景中最先被推广和商业化落地的自动泊车功能,目前是在一些限定环境下实现了功能跑通。面对多种多样的复杂停车场场景,系统需要不断增强感知算法能力或寻求新的传感器技术,来提升对周围环境感知和对障碍物探测的精准度。 传…...

单元测试之 - Spring框架提供的单元/集成测试注解
Spring框架提供了很多注解来辅助完成单元测试和集成测试(备注:这里的集成测试指容器内部的集成测试,非系统间的集成测试),先看看Spring框架提供了哪些注解以及对应的作用。RunWith(SpringRunner.class) / ExtendWith(SpringExtension.class)&…...
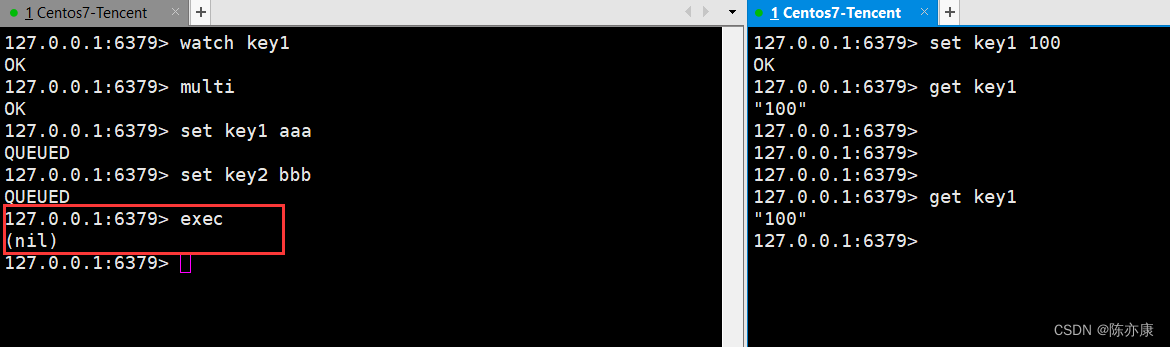
深入学习 Redis - 事务、实现原理、指令使用及场景
目录 一、Redis 事务 vs MySQL事务 二、Redis 事务的执行原理 2.1、执行原理 2.2、Redis 事务设计这么简单,为什么不涉及成 MySQL 那样强大呢? 三、Redis 事务的使用 3.1、使用场景 3.2、具体演示 开启/执行/放弃事务 watch 监控 watch 实现原理…...

异步javaScript
在本文中,我们将解释什么是异步编程,为什么我们需要它,并简要讨论 JavaScript 历史上异步函数是怎样被实现的。 预备知识:基本的计算机素养,以及对 JavaScript 基础知识的一定了解,包括函数和事件处理程序…...
看跨境电商世界区域分布,Live Market教你深入参与跨境创业
随着全球化发展带来互联网技术的进步和平台经济的触角伸向全球,跨境电商越来越成为全球贸易的重要组成部分。根据国际数据公司(IDC)的最新数据显示,全球前五大跨境电商平台分别是亚马逊、阿里巴巴、eBay、Wish和京东全球购。这五家…...
python中的装饰器的真正含义和用法
闭包: 闭包是python中的一个很实用的写法,可以使得用户在函数中调用该函数外的函数的变量,使得该变量常驻于内存中。 闭包函数: 输入是函数,输出也是一个函数。 装饰器的写法是python闭包的语法糖。 面试中经常面…...
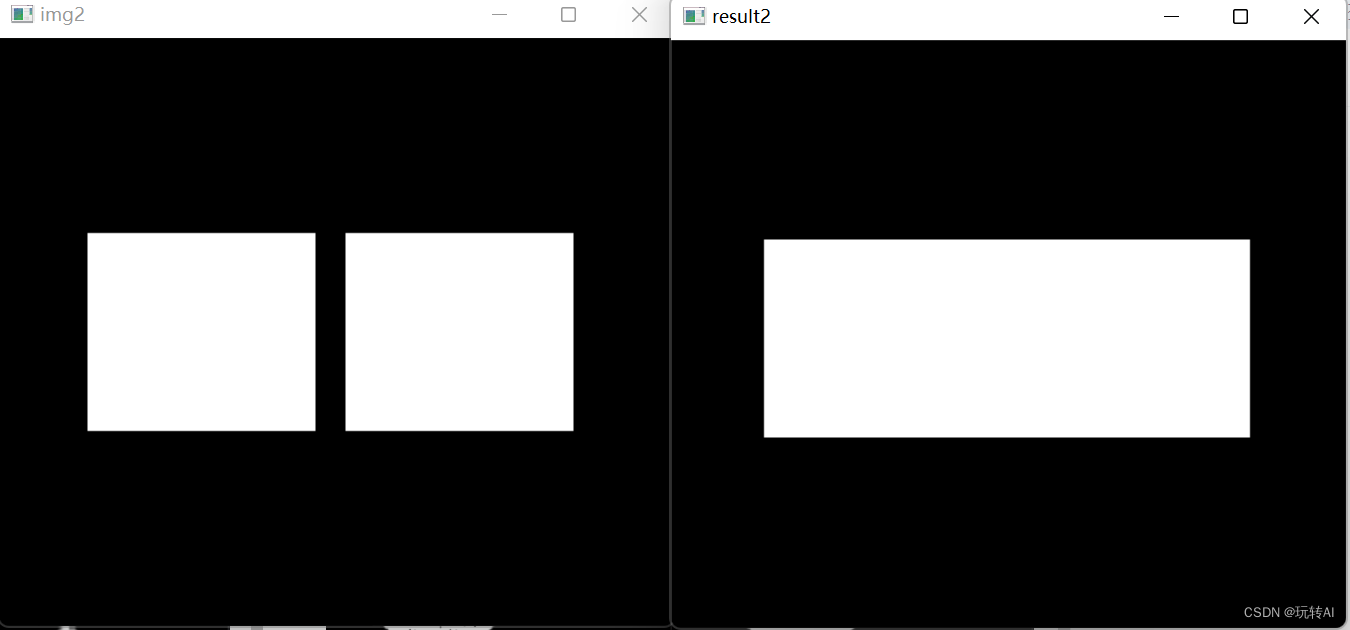
opencv基础-38 形态学操作-闭运算(先膨胀,后腐蚀)cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel)
闭运算是先膨胀、后腐蚀的运算,它有助于关闭前景物体内部的小孔,或去除物体上的小黑点,还可以将不同的前景图像进行连接。 例如,在图 8-17 中,通过先膨胀后腐蚀的闭运算去除了原始图像内部的小孔(内部闭合的…...
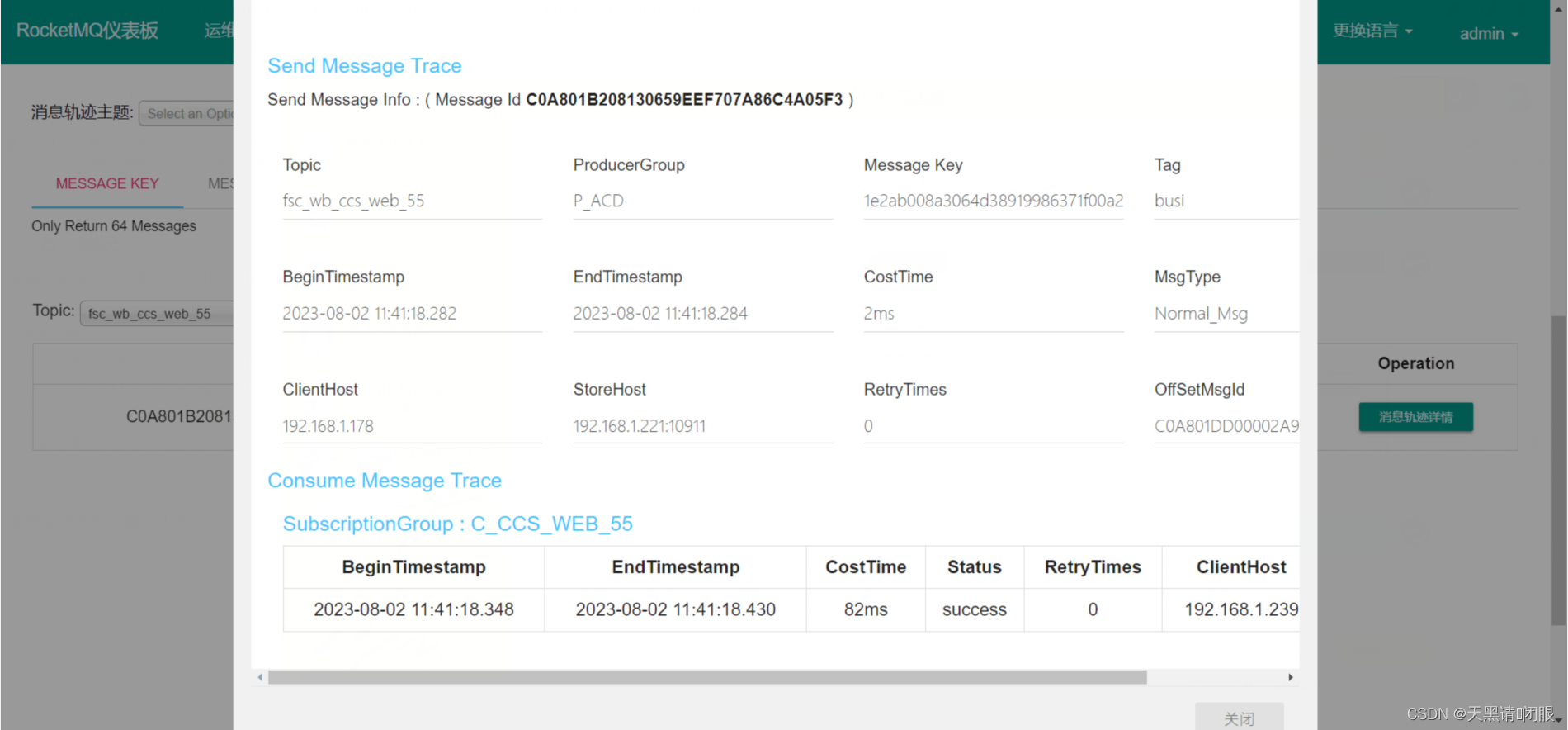
RocketMQ生产者和消费者都开启Message Trace后,Consume Message Trace没有消费轨迹
一、依赖 <dependency><groupId>org.apache.rocketmq</groupId><artifactId>rocketmq-spring-boot-starter</artifactId><version>2.0.3</version> </dependency>二、场景 1、生产者和消费者所属同一个程序 2、生产者开启消…...

JDV背后的技术-助力618 | 京东云技术团队
一、项目介绍 JDV(可视化大屏)是京东内部搭建可视化大屏的数据工具平台,内置10种模版特效,40种风格各异的图表、导航等组件。与集团其他数据工具打通,支持一站式、自助化、拖拽式搭建大屏,实现数据切换、联…...
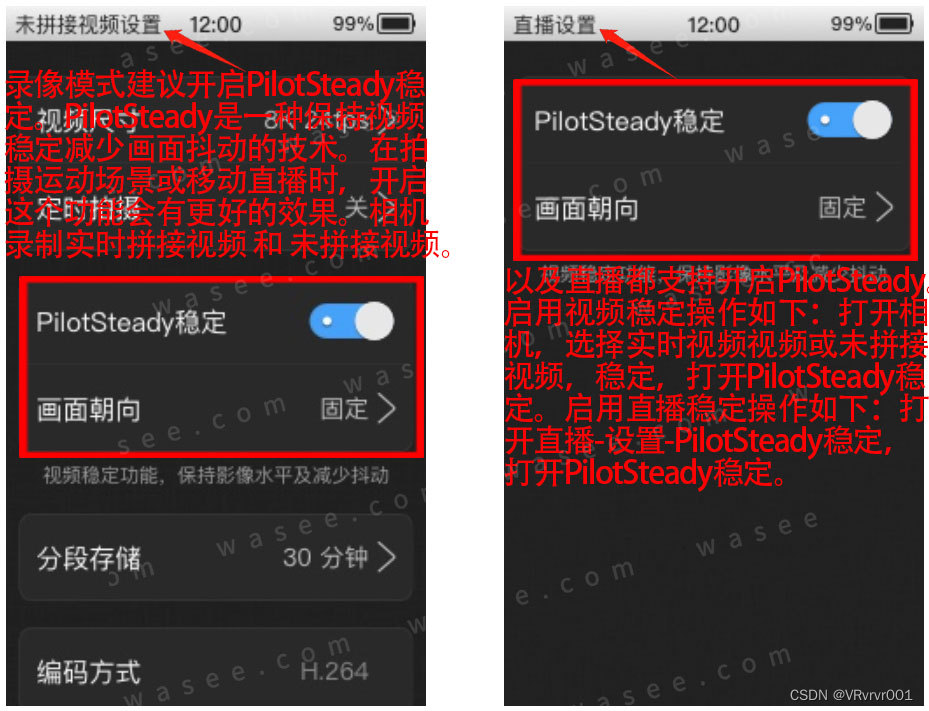
0基础学习VR全景平台篇 第78篇:全景相机-拍摄VR全景
新手入门圆周率科技,成立于2012年,是中国最早投身嵌入式全景算法研发的团队之一,亦是全球市场占有率最大的全景算法供应商。相继推出一体化智能屏、支持一键高清全景直播的智慧全景相机--Pilot Era和Pilot One,为用户带来实时畅享…...

Spring MVC简介与概述
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...
)
java基础复习(第六日)
java基础复习(五) 1.是否了解类似 RabbitMQ.kalka 之类的队列服务? 请简述队列取务中的常见要素和使用场景? 了解,队列服务是一种应用间的通信方式,可以实现异步处理、应用解耦、流量削峰和消息通信等功能 队列服务的常见要素:…...
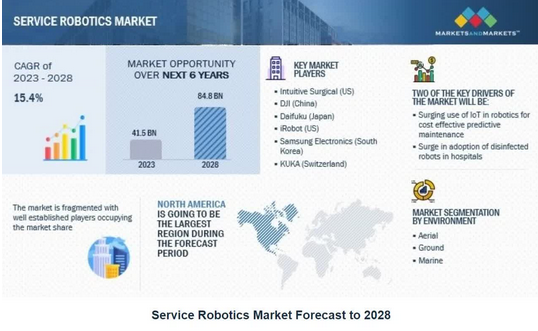
商用服务机器人公司【Richtech Robotics】申请纳斯达克IPO上市
来源:猛兽财经 作者:猛兽财经 猛兽财经获悉,总部位于美国内华达州拉斯维加斯由华人领导的商用服务机器人公司【Richtech Robotics】近期已向美国证券交易委员会(SEC)提交招股书,申请在纳斯达克IPO上市&am…...

关于nn.Embedding如何使用预定义词表
直接使用,则是没有pretrained的词表。 若要使用预定义词表,则可以用 pretrained_weight np.array(pretrained_weight) embeds.weight.data.copy_(torch.from_numpy(pretrained_weight))参考: https://wmathor.com/index.php/archives/1435/…...

怎么设置文件夹密码?文件夹密码设置方法合集
为文件夹设置密码可以有效地保护文件夹的数据安全,那么该怎么设置文件夹密码呢?下面我们来一起了解一下。 文件夹保护3000 想要简单快捷的为文件夹设置密码,那么,文件夹保护3000就是最佳的选择。它提供了3种文件夹保护方式&#…...
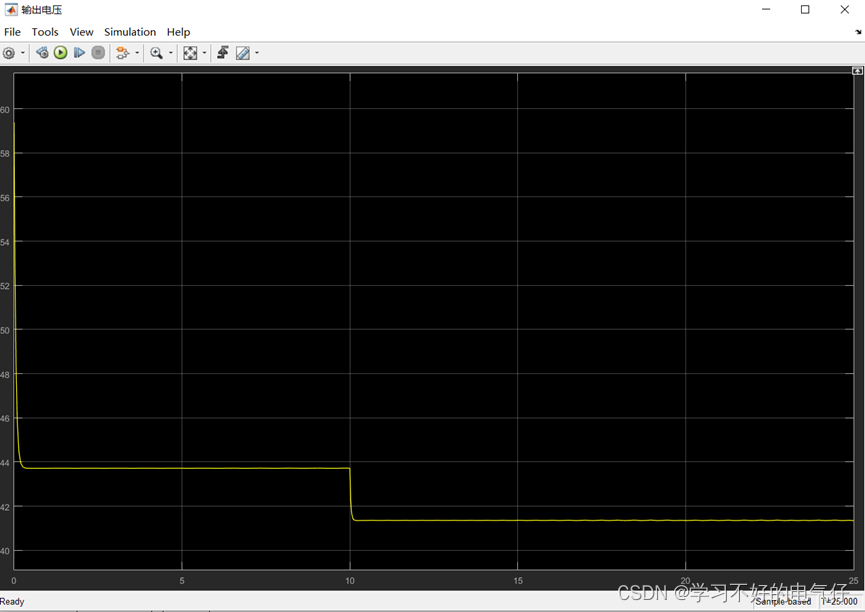
PEMFC氢氧质子交换燃料电池MATLAB仿真模型
氢氧燃料电池静态模型: (1)热力学电动势En (2)活化极化过电势Vact 活化损失主要是因为电极表面的反应速度过慢,在驱动电子传递到或者传送出电极的化学反应时,部分电压会被消耗。 (…...

终极鼠标连点器使用指南:3分钟掌握高效自动化技巧
终极鼠标连点器使用指南:3分钟掌握高效自动化技巧 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软件界面美观 ,操作…...

METSO A413248自动化系统
METSO A413248 自动化系统模块产品特点: 品牌归属:芬兰METSO(美卓)工业自动化系统原装备件。 产品类型:工业级自动化控制模块/接口模块。 核心功能:用于控制信号处理、数据采集及系统集成。 系统兼容&am…...

打不开JupyterLab
因为安装某些依赖导致JupyterLab的依赖被动升级或降级,从而影响了JupyterLab的运行,此时可以SSH登录到实例,然后输入jupyter-lab命令进行确认,如果执行命令报错则说明是此问题,那么可以通过pip install jupyterlab再次…...

GEO生成引擎优化:当AI成为信息分发的主角,品牌如何抢占对话窗口?
当用户不再"搜索-浏览",而是直接"AI提问-获取答案",传统SEO的逻辑正在被彻底改写。2026年,GEO(Generative Engine Optimization,生成式引擎优化)已经从概念走向规模化落地。本文从技术…...

十年以上经验的建站公司推荐|策划强、落地稳的网站制作公司盘点
互联网时代,企业官网已从单纯的信息展示窗口升级为集品牌价值传递、用户体验连接与业务高效转化于一体的核心数字阵地。行业报告显示,优质官网可帮助企业线上转化率提升35%-60%,而低效官网则可能导致潜在客户大量流失。面对市场上众多的网站建…...

在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型 开发代码辅助工具时,选择合适的模型是平衡效果与成本的关…...

抖音内容批量下载实战:从零开始构建个人视频资料库
抖音内容批量下载实战:从零开始构建个人视频资料库 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support.…...

机器学习力场攻克Peierls相变动力学:从对称性描述符到畴生长标度律
1. 项目概述:当机器学习遇见Peierls相变在凝聚态物理和材料科学的前沿,我们常常被一个核心问题所困扰:如何精确地模拟那些由电子和晶格(原子)强烈耦合所驱动的复杂动力学过程?这类系统,比如电荷…...

还在手动触发Lindy子任务?这6个隐藏API+3个低代码集成技巧,今天就能上线全自动流水线
更多请点击: https://kaifayun.com 第一章:Lindy多步骤任务自动化的价值与演进路径 Lindy效应指出,一项技术的预期剩余寿命与其当前已存在时间正相关;在自动化领域,Lindy原则催生了对“经久验证、语义稳定、可组合性强…...

从配置到运行时:Forge Admin 的动态 API 配置管理是怎么做的
问题:同一个接口,今天要加认证、明天要加加密、后天要限流,这些行为散落在拦截器、过滤器、注解里,改一次牵一发动全身,怎么集中管理和动态刷新? 1. 这个问题在企业后台里为什么常见 在企业后台开发中&am…...