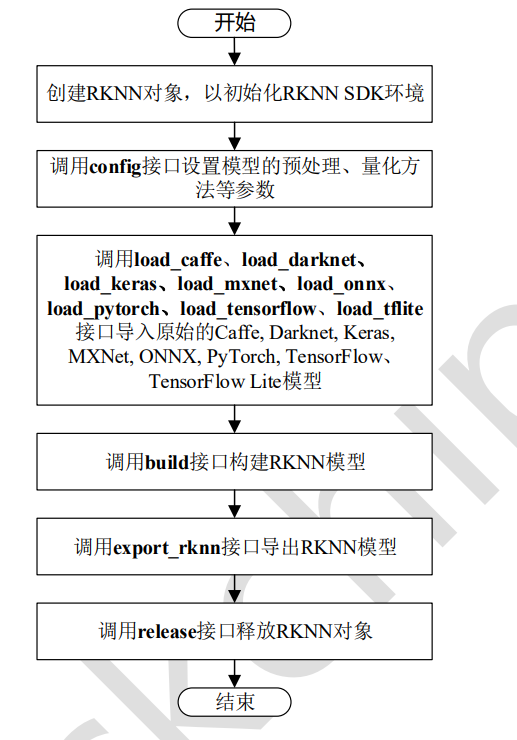
rv1109/1126 rknn 模型部署过程
rv1109/1126是瑞芯微出的嵌入式AI芯片,带有npu, 可以用于嵌入式人工智能应用。算法工程师训练出的算法要部署到芯片上,需要经过模型转换和量化,下面记录一下整个过程。
量化环境
模型量化需要安装rk的工具包:
rockchip-linux/rknn-toolkit (github.com)
版本要根据开发板的固件支持程度来,如果二者不匹配,可能转出来的模型无法运行或者结果不对。
模型量化
rknn支持caffe,tensorflow,tflite,onnx,mxnet,pytorch等模型量化,下面以onnx为例,其他格式基本类似。即可以使用量化包带的可视化界面,也可以自行写代码,更推荐自己写代码,复用性和灵活性更强,对可视化界面一笔带过。
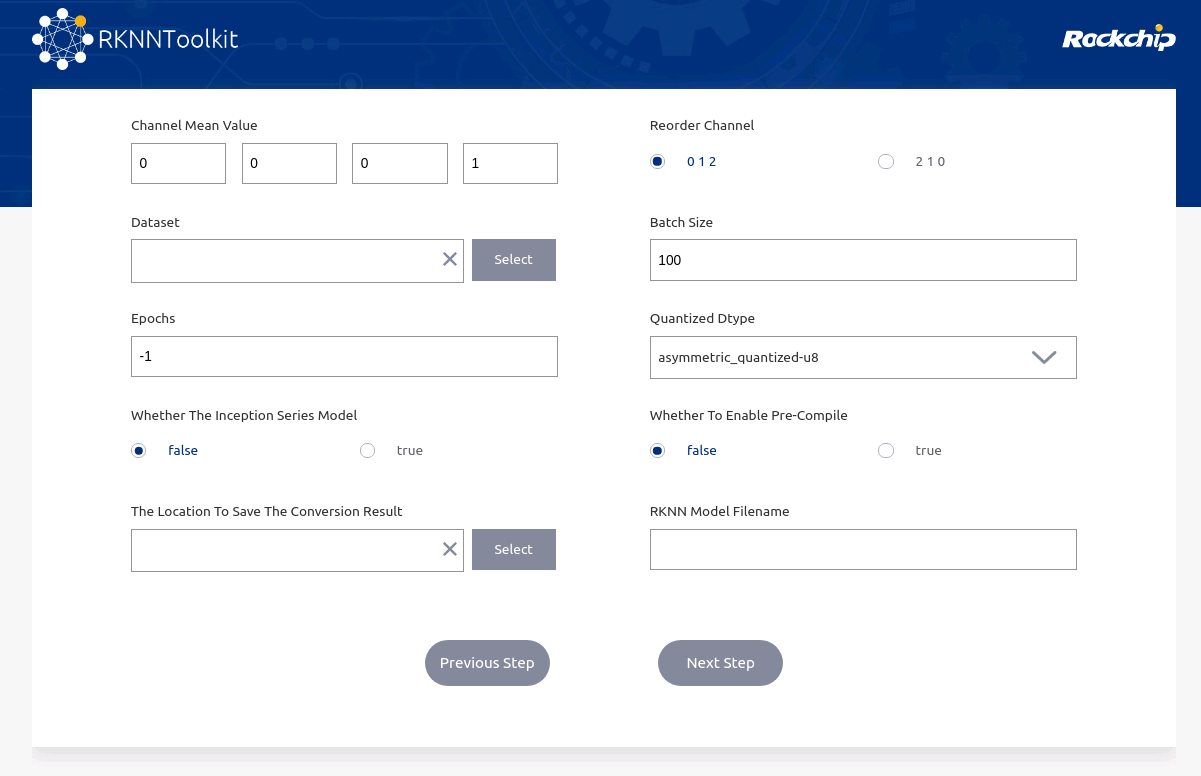
可视化量化工具
执行
python -m rknn.bin.visualization
选择对应格式,然后设置模型参数进行量化。
写代码量化
基础量化
最简单的量化方式如下,只需设置模型的均值、方差,载入原始模型,调用rknn.build接口,然后export_rknn即可。
from rknn.api import RKNNif __name__ == '__main__':rknn=RKNN()# pre-process configprint('--> config model')rknn.config(channel_mean_value='0 0 0 255',reorder_channel='0 1 2',target_platform=['rv1109'],#quantized_dtype="dynamic_fixed_point-i16")print('done')# Load mxnet modelonnx_model = 'yolov8n.onnx'print('--> Loading model')ret = rknn.load_onnx(onnx_model)if ret != 0:print('Load onnx_model model failed!')exit(ret)print('done')# Build modelprint('--> Building model')ret = rknn.build(do_quantization=True, dataset='../coco_resize.txt', pre_compile=False) # 若要在PC端仿真,pre_compile 为Falseif ret != 0:print('Build model failed!')exit(ret)print('done')print('--> Export RKNN model')ret = rknn.export_rknn('yolov8n_nohead.rknn')if ret != 0:print('Export RKNN model failed!')exit(ret)print('done')rknn.release()
模型量化需要提供量化图片的列表,格式为每行是一张图片的路径, 一般需要几百张,如:
images/0.jpg
images/1.jpg
模型推理验证
有两种方式验证模型的结果,一种是连接开发板,在开发板上运行,可以实际测试模型的推理速度,需要USB连接开发板,一种是在PC端仿真,速度较慢,适合在没有开发板的情况下,验证模型结果是否正确。两种方式使用的代码大部分一样,区别是在PC端仿真时,模型要以pre_compile=False模式进行量化,init_runtime参数为targe=None。
import os
import sys
from rknn.api import RKNN
import cv2
import numpy as npif __name__=="__main__":# Create RKNN objectrknn = RKNN()print('--> Loading RKNN model')ret = rknn.load_rknn('yolov8.rknn')if ret != 0:print('Load failed!')exit(ret)print('load done')# Init Runtimerknn.init_runtime(target="rv1109")#第二个参数device_id为开发板的设备id,不用填, targe=None时,代表PC仿真image = cv2.imread("1.jpg")outputs = rknn.inference(inputs=[image]) rknn.release()
量化精度评估(逐层)
有些时候,量化损失可能过大,这时我们希望能够逐层比对量化后模型与原始模型,这时需要使用accuracy_analysis接口,这个接口第一个参数是图片列表文件,里面是测试图片的路径,第二个参数是比对结果保存路径:
from rknn.api import RKNNif __name__ == '__main__':rknn=RKNN()# pre-process configprint('--> config model')rknn.config(channel_mean_value='0 0 0 255',reorder_channel='0 1 2',target_platform=['rv1109'],#quantized_dtype="dynamic_fixed_point-i16")print('done')# Load mxnet modelonnx_model = 'yolov8n.onnx'print('--> Loading model')ret = rknn.load_onnx(onnx_model)if ret != 0:print('Load onnx_model model failed!')exit(ret)print('done')# Build modelprint('--> Building model')ret = rknn.build(do_quantization=True, dataset='../coco_resize.txt', pre_compile=False) # 若要在PC端仿真,pre_compile 为Falseif ret != 0:print('Build model failed!')exit(ret)print('done')rknn.accuracy_analysis("test_list.txt", output_dir='./snapshot5') print('--> Export RKNN model')ret = rknn.export_rknn('yolov8n_nohead.rknn')if ret != 0:print('Export RKNN model failed!')exit(ret)print('done')rknn.release()
比对文件如下:
Conv__model.0_conv_Conv_214_out0_nhwc_1_320_320_16.tensor eculidean_norm=0.030792 cosine_norm=0.999525 eculidean=202.926056 cosine=0.999526
Sigmoid__model.0_act_Sigmoid_213_Mul__model.0_act_Mul_212_out0_nhwc_1_320_320_16.tensor eculidean_norm=0.049676 cosine_norm=0.998766 eculidean=178.751434 cosine=0.998767
Conv__model.1_conv_Conv_210_out0_nhwc_1_160_160_32.tensor eculidean_norm=0.103382 cosine_norm=0.994656 eculidean=521.709229 cosine=0.994656
Sigmoid__model.1_act_Sigmoid_211_Mul__model.1_act_Mul_209_out0_nhwc_1_160_160_32.tensor eculidean_norm=0.113702 cosine_norm=0.993536 eculidean=436.044495 cosine=0.993536
Conv__model.2_cv1_conv_Conv_208_out0_nhwc_1_160_160_32.tensor eculidean_norm=0.120058 cosine_norm=0.992793 eculidean=351.808380 cosine=0.992794
Sigmoid__model.2_cv1_act_Sigmoid_207_Mul__model.2_cv1_act_Mul_205_out0_nhwc_1_160_160_32.tensor eculidean_norm=0.169184 cosine_norm=0.985688 eculidean=262.819550 cosine=0.985688混合量化
有些时候,使用默认量化方法模型精度损失较大,我们通过逐层分析,也知道了那些层的损失较大,这时就需要控制一些层不量化,或以更高精度模式量化,这种方式就是混合量化。
与基础量化相比,混合量化分为两步:
第一步是通过rknn.hybrid_quantization_step1(替换基础量化中的rknn.build)获得模型的量化配置文件:
rknn.hybrid_quantization_step1(dataset='../coco_resize.txt')
该接口会生成3个文件:
xx.data
xx.json
xx.quantization.cfg
其中,.cfg文件时量化配置文件,用于控制每一层的量化:
%YAML 1.2
---
# add layer name and corresponding quantized_dtype to customized_quantize_layers, e.g conv2_3: float32
customized_quantize_layers: {}
quantize_parameters:'@attach_Concat_/model.22/Concat_5/out0_0:out0':dtype: asymmetric_affinemethod: layermax_value:- 647.7965087890625min_value:- 0.0zero_point:- 0scale:- 2.5403785705566406qtype: u8'@Concat_/model.22/Concat_5_1:out0':dtype: asymmetric_affinemethod: layermax_value:- 647.7965087890625min_value:- 0.0zero_point:- 0scale:- 2.5403785705566406qtype: u8
对于不量化或者以其他精度模式量化的层,以字典形式写在customized_quantize_layers中,rv1109支持asymmetric_quantized-u8,dynamic_fixed_point-i8和dynamic_fixed_point-i16,默认情况下,以asymmetric_quantized-u8方式量化,在需要更高精度时,可用dynamic_fixed_point-i16,但速度会更慢。对于损失较大的层,我们可以尝试设置dynamic_fixed_point-i16量化(若float32则不量化):
customized_quantize_layers: {"Split_/model.22/Split_21": "dynamic_fixed_point-i16","Reshape_/model.22/dfl/Reshape_20": "float32"
}
设置完成量化配置后,使用rknn.hybrid_quantization_step2进行量化:
from rknn.api import RKNNif __name__ == '__main__':rknn=RKNN()# pre-process configprint('--> config model')rknn.config(channel_mean_value='0 0 0 255',reorder_channel='0 1 2',target_platform=['rv1109'],#quantized_dtype="dynamic_fixed_point-i16")print('done')# Load mxnet modelonnx_model = 'yolov8n.onnx'print('--> Loading model')ret = rknn.load_onnx(onnx_model)if ret != 0:print('Load onnx_model model failed!')exit(ret)print('done')# Build modelprint('--> Building model')rknn.hybrid_quantization_step2(dataset='../coco_resize.txt', model_input='torch_jit.json',data_input="torch_jit.data",model_quantization_cfg="torch_jit.quantization.cfg",pre_compile=False)if ret != 0:print('Build model failed!')exit(ret)print('done')rknn.accuracy_analysis("test_list.txt", output_dir='./snapshot5') print('--> Export RKNN model')ret = rknn.export_rknn('yolov8n_nohead.rknn')if ret != 0:print('Export RKNN model failed!')exit(ret)print('done')rknn.release()
相关文章:
rv1109/1126 rknn 模型部署过程
rv1109/1126是瑞芯微出的嵌入式AI芯片,带有npu, 可以用于嵌入式人工智能应用。算法工程师训练出的算法要部署到芯片上,需要经过模型转换和量化,下面记录一下整个过程。 量化环境 模型量化需要安装rk的工具包: rockchip-linux/rk…...

Android平台一对一音视频通话方案对比:WebRTC VS RTMP VS RTSP
一对一音视频通话使用场景 一对一音视频通话都需要稳定、清晰和流畅,以确保良好的用户体验,常用的使用场景如下: 社交应用:社交应用是一种常见的使用场景,用户可以通过音视频通话进行面对面的交流;在线教…...

--binlog-row-event-max-size
--binlog-row-event-max-size MySQL中用于控制rows格式的Binlog,binlog以chunk的方式存储,每个chunk的大小由binlog-row-event-max-size 进行控制; 如果event比较大的时候可以调大这个值;;改值必须是256的倍数&#…...

Jmeter命令行运行实例讲解
1. 简介 使用非 GUI 模式,即命令行模式运行 JMeter 测试脚本能够大大缩减所需要的系统资 本文介绍windows下以命令行模式运行的方法。 1.1. 命令介绍 jmeter -n -t <testplan filename> -l <listener filename> 示例: jmeter -n -t test…...

pl/sql函数如何返回多行数据?在线等......
编辑csm8109022010-01-27 09:59:18 这个问题我以前问过类似的,但一直没得到如意的答案!在oracle 里soctt的用户下的emp表,比如写一个函数,传入的参数为部门编号,然后返回所有该部门人员信息的函数。要用到游标&…...

Ubuntu Find命令详解
一、Find命令简介 Ubuntu的Find命令是一种常用的终端指令,用于在文件系统中查找符合条件的文件和目录。该命令的语法格式如下: find [PATH] [OPTION] [EXPRESSION]其中,PATH表示待查找的目录,OPTION为选项参数,EXPRES…...

ADS Momentum学习笔记
ADS Momentum的简介 ADS Layout界面仿真采用的方法主要是Momentum(矩量法)。 Momentum的特点 Momentum是高级设计系统(ADS)的重要组成部分,它提供了设计现代通信系统的电磁仿真。它可以用来计算一般平面电路的S参数…...
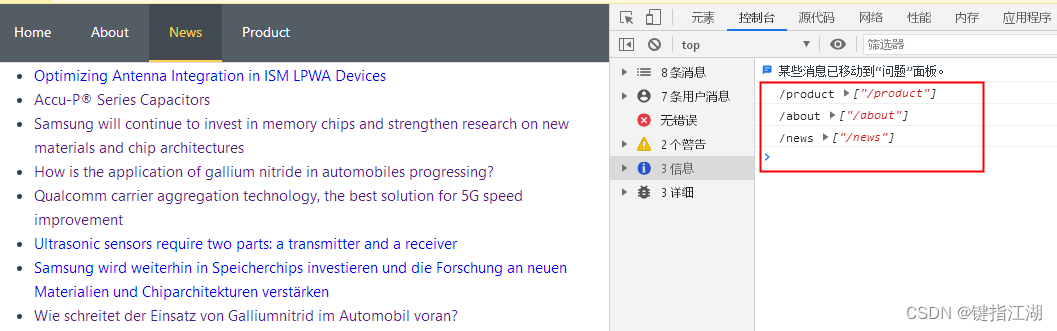
解决Vue3 使用Element-Plus导航刷新active高亮消失
解决Vue3 使用Element-Plus导航刷新后active高亮消失的问题 启用路由模式会在激活导航时以 index 作为 path 进行路由跳转 使用 default-active 来设置加载时的激活项。 接下来打印一下选中项index和index路径, 刷新也是没有任何问题的,active不会消失…...

K8S系列文章之 一键部署K8S环境
部署的原理是基于自动化部署工具 Ansible 实现的,需要提前安装Ansible 并配置下主机节点环境 1. 安装 Ansible 首先ansible基于python2.X 环境,默认centos都已经安装好了python2环境 // 最好更新下库 // yum update yum install -y epel-release yum i…...

Spring Boot、Spring Cloud、Spring Alibaba 版本对照关系及稳定兼容版本
Spring Boot、Spring Cloud、Spring Alibaba 版本对照关系及稳定兼容版本 引言 在 Java 生态系统中,Spring Boot、Spring Cloud 和 Spring Alibaba 是非常流行的框架,它们提供了丰富的功能和优雅的解决方案。然而,随着不断的发展和更新&…...

虫情监测仪介绍—技术原理、功能优势是什么?
KH-CQPest虫情监测仪是做好虫情监测的重要设备,利用虫情监测仪能够对农业大田、智慧温室、林业等场景的害虫分布情况及害虫种类进行监测,协助人们制定合理的防治措施。 1.技术原理: KH-CQPest虫情监测仪采用光学诱虫原理,配合传感…...

HTML5 Canvas和Svg:哪个简单且好用?
HTML5 Canvas 和 SVG 都是基于标准的 HTML5 技术,可用于创建令人惊叹的图形和视觉体验。 首先,让我们花几句话介绍HTML5 Canvas和SVG。 什么是Canvas? Canvas(通过 标签使用)是一个 HTML 元素,用于在用户计算机屏幕…...

ChatGPT在社交媒体聊天和评论分析中的应用如何?
ChatGPT在社交媒体聊天和评论分析中具有广泛的应用前景,可以帮助企业、个人和社会从多个角度更好地理解用户观点、趋势和情感。以下是详细的讨论: **1. 舆情分析与趋势预测:** ChatGPT可以用于分析社交媒体上的评论、帖子和消息,…...
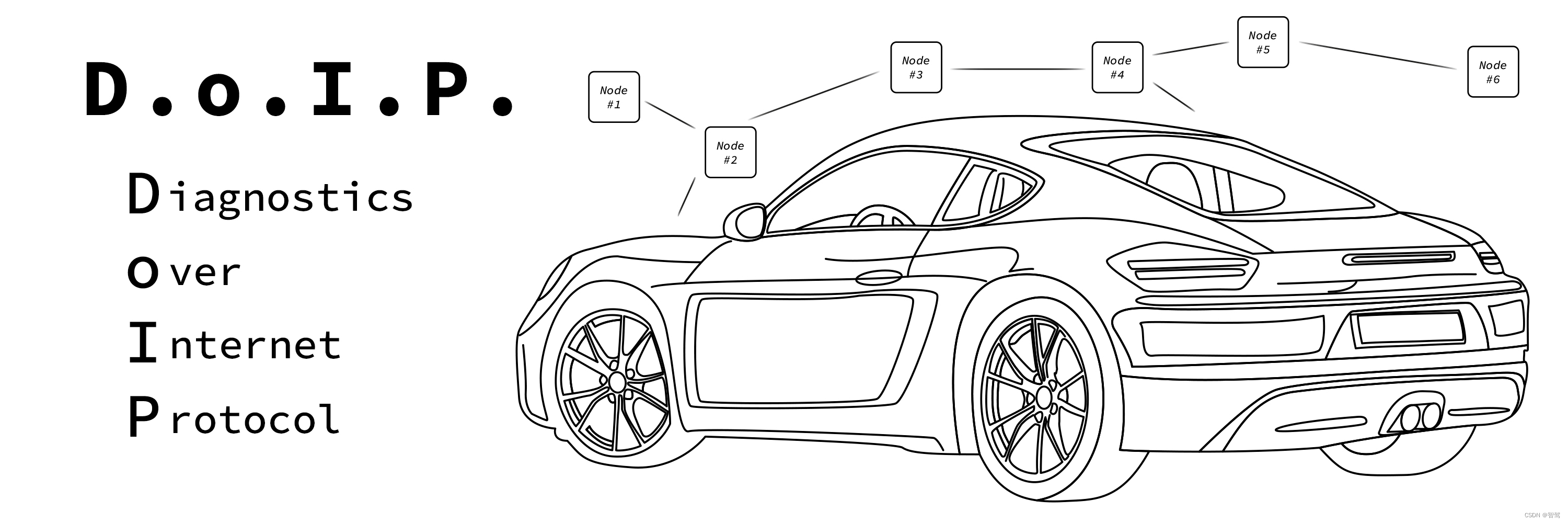
DoIP学习笔记系列:(四)用CAPL脚本读取DID的关键点
文章目录 1. 如何在CAPL中读取DID?1.1 避坑如何新建CAPL工程,在此不再赘述,本章主要分享一下如何在CAPL中调用DoIP接口、diag接口进行DoIP和诊断的测试。 1. 如何在CAPL中读取DID? 通常在实际项目中,会有很多DID,各种版本号、各种观测量,如果手动点,显然很麻烦,如果要…...

chrome插件开发实例06-定制自己的Chrome DevTools调试工具
目录 Chrome DevTools 调试工具 演示 编辑 源码 devtools.html devtools.js panel.html panel.js...
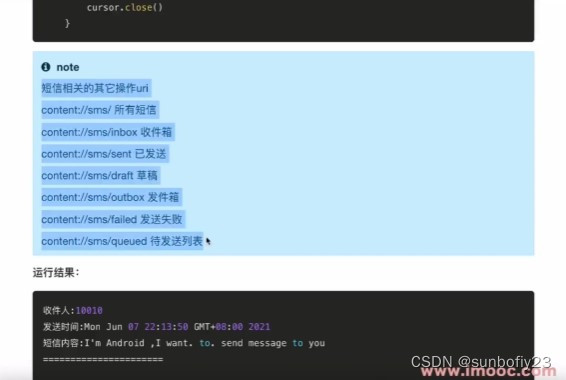
安卓读取,添加,更新,删除联系人,读取短信
目录 读取联系人 添加联系人 更新联系人 删除联系人 读取短信 读取联系人 安卓可以通过contentResolver来读取联系人表,联系人表的Uri信息是:content://com.android.contacts/data/phones 从而输出联系人信息, 需要相关权限:…...
205. 同构字符串、(哈希表)1002. 查找共用字符)
Practices6|69. x 的平方根、(哈希表)205. 同构字符串、(哈希表)1002. 查找共用字符
69. x 的平方根 1.题目: 给你一个非负整数 x ,计算并返回 x 的 算术平方根 。 由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。 注意:不允许使用任何内置指数函数和算符,例如 pow(x, 0.…...
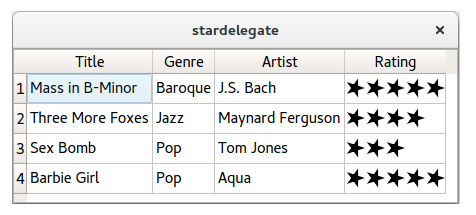
Qt扫盲-Model/View入门
Model/View 编程入门 一、概述二、介绍1. 标准部件2. Model/View 控件3. Model/View控件概述4. 在表格单和 model 之间使用适配器 Adapters 三、 简单的 model / view 应用程序示例1. 一个只读表2. 使用role扩展只读示例3. 表格单元中的时钟4. 为列和行设置标题5. 最小编辑示例…...
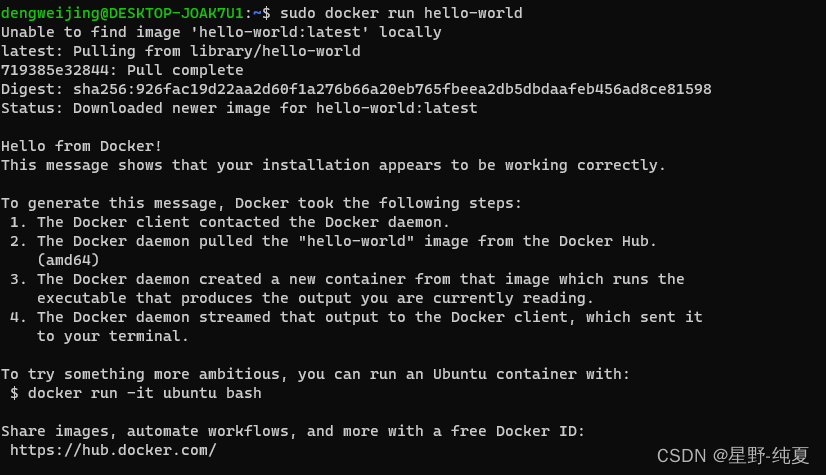
关于win11 debian wsl 子系统安装启动docker一直starting,无法启动
首先我先说明,我的步骤都是按照官网步骤来的 通过官网的操作步骤 通过测试命令 sudo docker run hello-world得到下面的命令,我们通过启动命令 sudo service docker start 执行结果如下图 也就是说无法启动,一直显示在启动中 遇到这种情况…...
Nginx反向代理配置+负载均衡集群部署
文章目录 负载均衡反向代理基础环境部署:什么是代理实验环境图流量过程 环境部署准备两台Web服务器安装Nginx准备页面内容添加主机名 代理服务器配置 修改windos hosts文件测试:终端浏览器 负载均衡反向代理基础环境部署: 什么是代理 正向代…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

64_《智能体微服务架构企业级实战教程》授权与认证之授权认证集成测试
前言 配套视频教程: 在 Bilibili课堂、CSDN课程、51CTO学堂 同步发售,提供:源码+部署脚本+文档。 bilibili课堂视频教程:智能体微服务架构企业级实战教程_哔哩哔哩_bilibili CSDN课程视频教程:智能体微服务架构企业级实战教程_在线视频教程-CSDN程序员研修院 51CTO学堂…...

极致精简,功能强大的PDF编辑工具
这是一款功能全面的PDF编辑工具 你只需要导入一份PDF格式文件 就可以快速的对它进行插入 批注编辑保护转换等各种操作 而且无需登录 也可以直接使用 在插入选项中可以进行插入文字图片 页面页眉页脚页码文档背景水印视频音频等 在批注选项中可以管理批注隐藏批注 高亮显示 文本…...

长期使用Taotoken聚合服务对项目月度账单的可预测性提升
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken聚合服务对项目月度账单的可预测性提升 在AI驱动的项目开发与运营中,成本控制与预算规划是团队管理者…...

TVA注意力层INT8量化配置技巧
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

DeepSeek重复代码识别失效了?5个被90%团队忽略的AST解析盲区及修复清单
更多请点击: https://codechina.net 第一章:DeepSeek代码重复检测失效的真相与影响 DeepSeek-R1 模型在代码理解任务中表现出色,但其内置的代码重复检测机制在特定场景下存在系统性失效。根本原因在于模型对语义等价但语法结构差异显著的代…...

Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题
Windows Cleaner:终极免费系统清理工具,彻底解决C盘空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红、…...

正视孩童情绪波动,耐心陪伴平稳疏导
孩子的情绪就像夏天的天气,前一秒还晴空万里,后一秒可能就乌云密布。面对突如其来的哭闹、发脾气或者闷闷不乐,很多家长会急着“灭火”——要么讲道理,要么直接制止。但其实,情绪波动本身不是问题,它是孩子…...

8款网盘直链下载助手:彻底告别限速烦恼,实现高速下载自由
8款网盘直链下载助手:彻底告别限速烦恼,实现高速下载自由 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移…...

3步开启Windows 11安卓应用新体验:WSA完整使用指南
3步开启Windows 11安卓应用新体验:WSA完整使用指南 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA Windows Subsystem for Android(简…...