python-opencv对极几何 StereoRectify
OpenCV如何正确使用stereoRectify函数
函数介绍
用于双目相机的立体校正环节中,这里只谈谈这个函数怎么使用,参数具体指哪些
函数参数
随便去网上一搜或者看官方手册就能得到参数信息,但是!!相对关系非常容易出错!!这里详细解释一下这些参数究竟怎么用
void stereoRectify(InputArray cameraMatrix1, InputArray distCoeffs1, InputArray cameraMatrix2,InputArray distCoeffs2, Size imageSize, InputArray R, InputArray T,OutputArray R1, OutputArray R2, OutputArray P1, OutputArray P2, OutputArray Q, int flags=CALIB_ZERO_DISPARITY, double alpha=-1, Size newImageSize=Size(), Rect* validPixROI1=0, Rect* validPixROI2=0 )
cameraMatrix1-第一个摄像机的摄像机矩阵,即左相机相机内参矩阵,矩阵第三行格式应该为 0 0 1
distCoeffs1-第一个摄像机的畸变向量
cameraMatrix2-第一个摄像机的摄像机矩阵,即右相机相机内参矩阵,矩阵第三行格式应该为 0 0 1
distCoeffs2-第二个摄像机的畸变向量
imageSize-图像大小
R- 相机之间的旋转矩阵,这里R的意义是:相机1通过变换R到达相机2的位姿
T- 左相机到右相机的平移矩阵
R1-输出矩阵,第一个摄像机的校正变换矩阵(旋转变换)
R2-输出矩阵,第二个摄像机的校正变换矩阵(旋转矩阵)
P1-输出矩阵,第一个摄像机在新坐标系下的投影矩阵
P2-输出矩阵,第二个摄像机在想坐标系下的投影矩阵
Q-4*4的深度差异映射矩阵
flags-可选的标志有两种零或者 CV_CALIB_ZERO_DISPARITY ,如果设置 CV_CALIB_ZERO_DISPARITY 的话,该函数会让两幅校正后的图像的主点有相同的像素坐标。否则该函数会水平或垂直的移动图像,以使得其有用的范围最大
alpha-拉伸参数。如果设置为负或忽略,将不进行拉伸。如果设置为0,那么校正后图像只有有效的部分会被显示(没有黑色的部分),如果设置为1,那么就会显示整个图像。设置为0~1之间的某个值,其效果也居于两者之间。
newImageSize-校正后的图像分辨率,默认为原分辨率大小。
validPixROI1-可选的输出参数,Rect型数据。其内部的所有像素都有效
validPixROI2-可选的输出参数,Rect型数据。其内部的所有像素都有效
opencv进行双目标定以及极线校正 python代码
双目标定
参考博客 OpenCV相机标定全过程
[OpenCV实战]38 基于OpenCV的相机标定
opencv立体标定函数 stereoCalibrate()
主要使用的函数
findChessboardCorners() #棋盘格角点检测
cornerSubPix() #亚像素检测
calibrateCamera() #单目标定 求解摄像机的内在参数和外在参数
stereoCalibrate() #双目标定 求解两个摄像头的内外参数矩阵,以及两个摄像头的位置关系R,T
代码
import cv2
import os
import numpy as npleftpath = 'images/left'
rightpath = 'images/right'
CHECKERBOARD = (11,12) #棋盘格内角点数
square_size = (30,30) #棋盘格大小,单位mm
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
imgpoints_l = [] #存放左图像坐标系下角点位置
imgpoints_r = [] #存放左图像坐标系下角点位置
objpoints = [] #存放世界坐标系下角点位置
objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
objp[0,:,0] *= square_size[0]
objp[0,:,1] *= square_size[1]for ii in os.listdir(leftpath):img_l = cv2.imread(os.path.join(leftpath,ii))gray_l = cv2.cvtColor(img_l,cv2.COLOR_BGR2GRAY)img_r = cv2.imread(os.path.join(rightpath,ii))gray_r = cv2.cvtColor(img_r,cv2.COLOR_BGR2GRAY)ret_l, corners_l = cv2.findChessboardCorners(gray_l, CHECKERBOARD) #检测棋盘格内角点ret_r, corners_r = cv2.findChessboardCorners(gray_r, CHECKERBOARD)if ret_l and ret_r:objpoints.append(objp)corners2_l = cv2.cornerSubPix(gray_l,corners_l,(11,11),(-1,-1),criteria) imgpoints_l.append(corners2_l)corners2_r = cv2.cornerSubPix(gray_r,corners_r,(11,11),(-1,-1),criteria)imgpoints_r.append(corners2_r)#img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2,ret)#cv2.imwrite('./ChessboardCornersimg.jpg', img)
ret, mtx_l, dist_l, rvecs_l, tvecs_l = cv2.calibrateCamera(objpoints, imgpoints_l, gray_l.shape[::-1],None,None) #先分别做单目标定
ret, mtx_r, dist_r, rvecs_r, tvecs_r = cv2.calibrateCamera(objpoints, imgpoints_r, gray_r.shape[::-1],None,None)retval, cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, R, T, E, F = \cv2.stereoCalibrate(objpoints, imgpoints_l, imgpoints_r, mtx_l, dist_l, mtx_r, dist_r, gray_l.shape[::-1]) #再做双目标定print("stereoCalibrate : \n")
print("Camera matrix left : \n")
print(cameraMatrix1)
print("distCoeffs left : \n")
print(distCoeffs1)
print("cameraMatrix left : \n")
print(cameraMatrix2)
print("distCoeffs left : \n")
print(distCoeffs2)
print("R : \n")
print(R)
print("T : \n")
print(T)
print("E : \n")
print(E)
print("F : \n")
print(F)将打印的结果保存到标定文件中即可
极线校正
参考博客 机器视觉学习笔记(8)——基于OpenCV的Bouguet立体校正
小白视角之Bouguet双目立体校正原理
主要使用的函数
stereoRectify() #计算旋转矩阵和投影矩阵
initUndistortRectifyMap() #计算校正查找映射表
remap() #重映射代码
import cv2
import numpy as npdef cat2images(limg, rimg):HEIGHT = limg.shape[0]WIDTH = limg.shape[1]imgcat = np.zeros((HEIGHT, WIDTH*2+20,3))imgcat[:,:WIDTH,:] = limgimgcat[:,-WIDTH:,:] = rimgfor i in range(int(HEIGHT / 32)):imgcat[i*32,:,:] = 255 return imgcatleft_image = cv2.imread("images/left/268.jpg")
right_image = cv2.imread("images/right/268.jpg")imgcat_source = cat2images(left_image,right_image)
HEIGHT = left_image.shape[0]
WIDTH = left_image.shape[1]
cv2.imwrite('imgcat_source.jpg', imgcat_source )camera_matrix0 = np.array([[1.30991855e+03, 0.00000000e+00, 5.90463086e+02],[0.00000000e+00, 1.31136722e+03, 3.33464608e+02],[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]]) .reshape((3,3)) #即上文标定得到的 cameraMatrix1distortion0 = np.array([-4.88890701e-01, 3.27964225e-01, -2.72130825e-04, 1.28030208e-03, -1.85964828e-01]) #即上文标定得到的 distCoeffs1camera_matrix1 = np.array([[1.30057467e+03, 0.00000000e+00, 6.28445749e+02],[0.00000000e+00, 1.30026325e+03, 3.90475091e+02],[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]]) .reshape((3,3)) #即上文标定得到的 cameraMatrix2
distortion1 = np.array([-4.95938411e-01, 2.70207629e-01, 1.81014753e-04, -4.58891345e-04, 4.41327829e-01]) #即上文标定得到的 distCoeffs2R = np.array([[ 0.99989348, 0.01340678, -0.00576869], [-0.01338004, 0.99989967, 0.00465071], [ 0.00583046, -0.00457303, 0.99997255]]) #即上文标定得到的 R
T = np.array([-244.28272039, 3.84124178, 2.0963191]) #即上文标定得到的T(R_l, R_r, P_l, P_r, Q, validPixROI1, validPixROI2) = \cv2.stereoRectify(camera_matrix0, distortion0, camera_matrix1, distortion1, np.array([WIDTH,HEIGHT]), R, T) #计算旋转矩阵和投影矩阵(map1, map2) = \cv2.initUndistortRectifyMap(camera_matrix0, distortion0, R_l, P_l, np.array([WIDTH,HEIGHT]), cv2.CV_32FC1) #计算校正查找映射表rect_left_image = cv2.remap(left_image, map1, map2, cv2.INTER_CUBIC) #重映射#左右图需要分别计算校正查找映射表以及重映射
(map1, map2) = \cv2.initUndistortRectifyMap(camera_matrix1, distortion1, R_r, P_r, np.array([WIDTH,HEIGHT]), cv2.CV_32FC1)rect_right_image = cv2.remap(right_image, map1, map2, cv2.INTER_CUBIC)imgcat_out = cat2images(rect_left_image,rect_right_image)
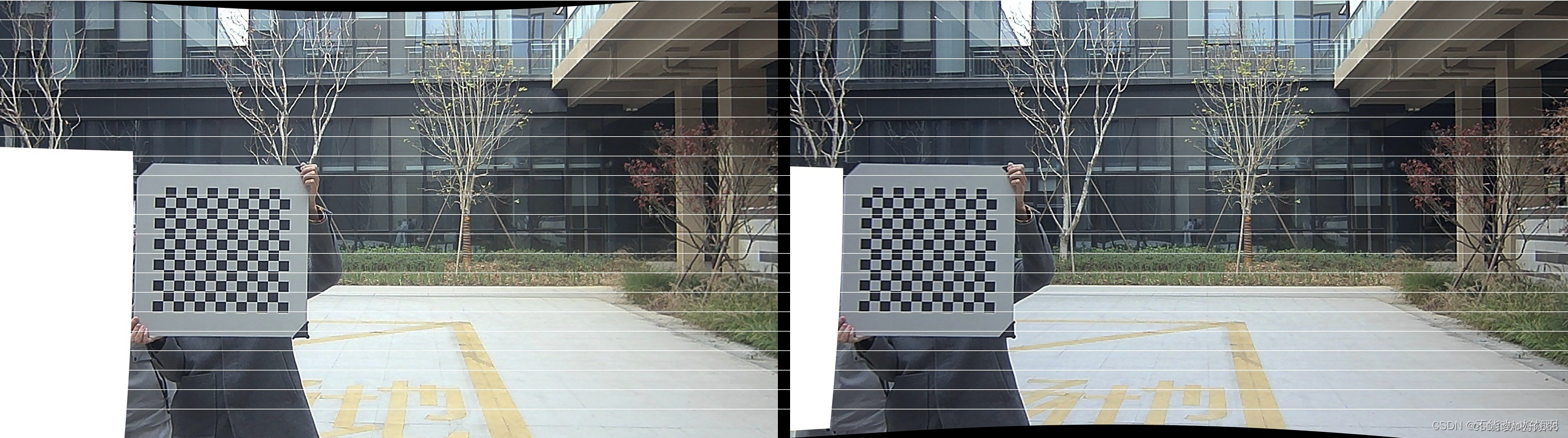
cv2.imwrite('imgcat_out.jpg', imgcat_out)效果图
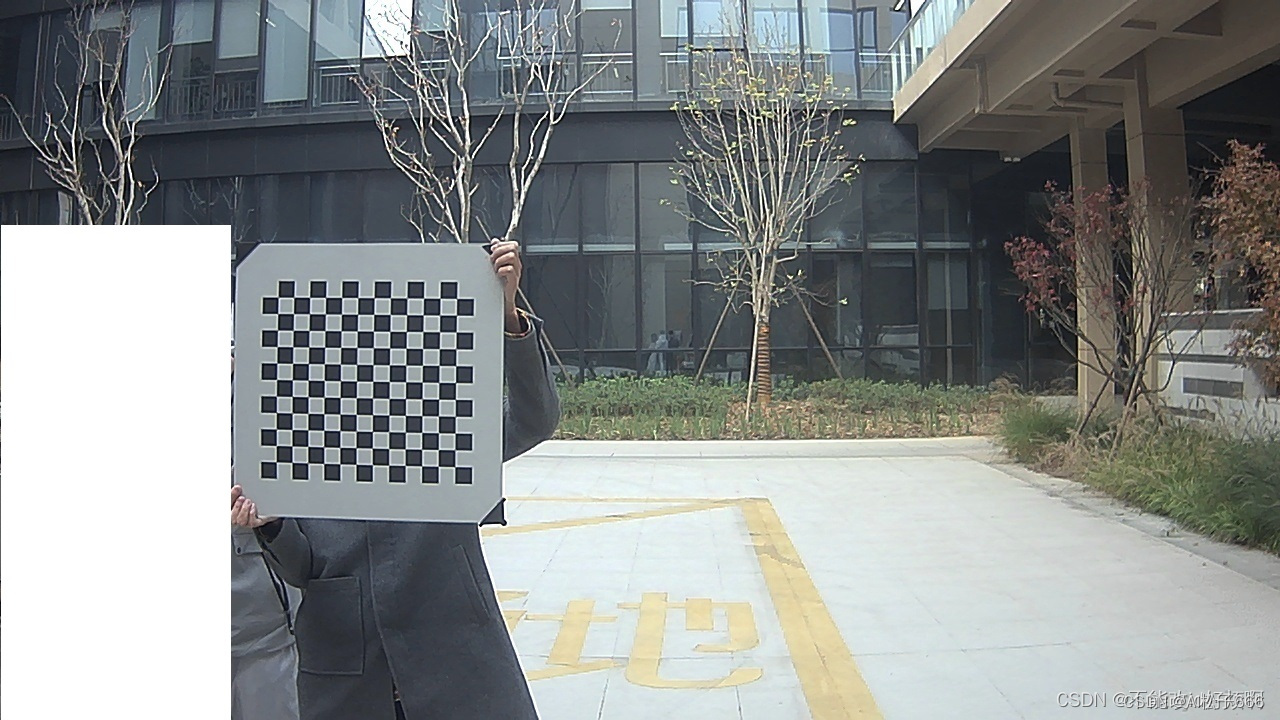
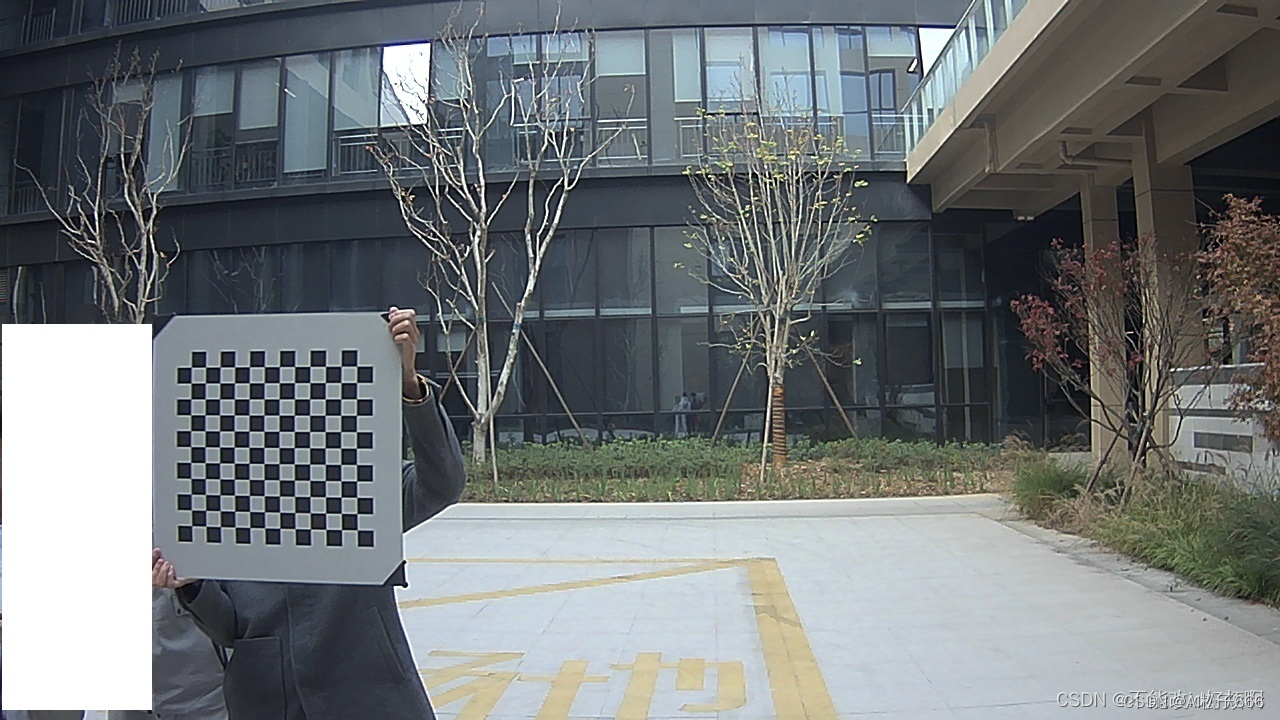
校正前
左图
右图
校正后
相关文章:
python-opencv对极几何 StereoRectify
OpenCV如何正确使用stereoRectify函数 函数介绍 用于双目相机的立体校正环节中,这里只谈谈这个函数怎么使用,参数具体指哪些函数参数 随便去网上一搜或者看官方手册就能得到参数信息,但是!!相对关系非常容易出错&…...
pom文件---maven
027-Maven 命令行-实验四-生成 Web 工程-执行生成_ev_哔哩哔哩_bilibili 27节.后续补充 一.maven下载安装及配置 1)maven下载 2) settings文件配置本地仓库 3)settings配置远程仓库地址 4)配置maven工程的基础JDK版本 5)确认JDK环境变量配置没问题,配置maven的环境变量 验证…...

界面控件DevExpress.Drawing图形库早期增强功能分享
众所周知,DevExpress在v22.2发布周期中引入了全新的DevExpress.Drawing图形库(并且已经在随后的小更新中引入了一系列增强功能)。 在这篇博文中,我们将总结在DevExpress v23.1中解决的一些问题,以及在EAP构建中为以下…...
Semantic Kernel 入门系列:Connector连接器
当我们使用Native Function的时候,除了处理一些基本的逻辑操作之外,更多的还是需要进行外部数据源和服务的对接,要么是获取相关的数据,要么是保存输出结果。这一过程在Semantic Kernel中可以被归类为Connector。 Connector更像是…...

Maven介绍-下载-安装-使用-基础知识
Maven介绍-下载-安装-使用-基础知识 Maven的进阶高级用法可查看这篇文章: Maven分模块-继承-聚合-私服的高级用法 文章目录 Maven介绍-下载-安装-使用-基础知识01. Maven1.1 初识Maven1.1.1 什么是Maven1.1.2 Maven的作用 02. Maven概述2.1 Maven介绍2.2 Maven模型…...
Ansible环境搭建,CentOS 系列操作系统搭建Ansible集群环境
Ansible是一种自动化工具,基于Python写的,原理什么的就不过多再说了,详情参考:https://www.itwk.cc/post/403.html https://blog.csdn.net/qq_34185638/article/details/131079320?spm1001.2014.3001.5502 环境准备 HOSTNAMEIP…...
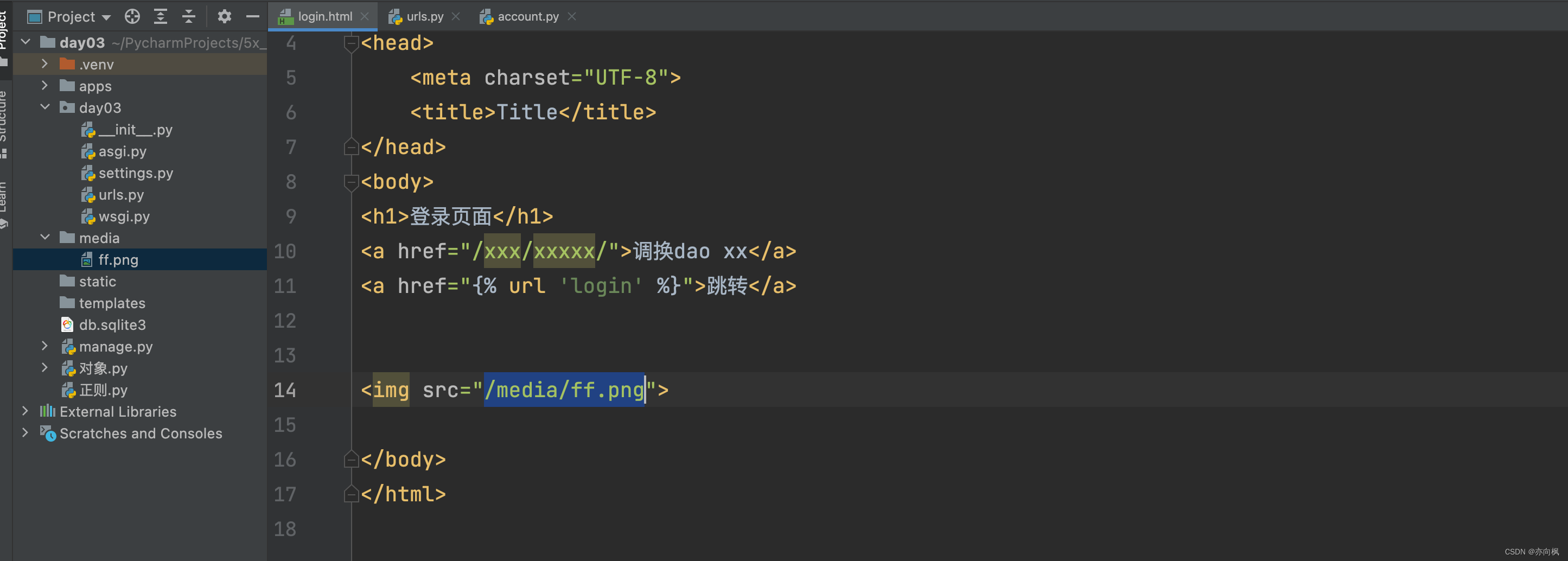
Django基础
1.Django基础 路由系统视图模板静态文件和媒体文件中间件ORM(时间) 2.路由系统 本质上:URL和函数的对应关系。 2.1 传统的路由 from django.contrib import admin from django.urls import path from apps.web import viewsurlpatterns …...

HTML,url,unicode编码
目录标题 HTML实体编码urlcode编码unicode编码小结基础例题高级例题 HTML实体编码 实体表示: 以&符号开始,后面跟着一个预定义的实体的名称,或是一个#符号以及字符的十进制数字。 例: <p>hello</p> <!-- 等同…...
)
Hbase-热点问题(数据存储倾斜问题)
1. 危害 某一台regionserver消耗过多,承受过多的并发量,时间长机器性能下降,甚至宕机 2. 解决 可以通过设计rowkey预分区的方法解决 比如可以预分区120个,1月的数据存到1-10分区,每个月的数据存到10个分区ÿ…...

一个基于Java线程池管理的开源框架Hippo4j实践
线程池痛点 线程池是一种基于池化思想管理线程的工具,使用线程池可以减少创建销毁线程的开销,避免线程过多导致系统资源耗尽。在高并发以及大批量的任务处理场景,线程池的使用是必不可少的。线程池常见痛点: 线程池随便定义&…...

源码解析Flink源节点数据读取是如何与checkpoint串行执行
文章目录 源码解析Flink源节点数据读取是如何与checkpoint串行执行Checkpoint阶段StreamTask类变量actionExecutor的实现和初始化小结 数据读取阶段小结 总结 源码解析Flink源节点数据读取是如何与checkpoint串行执行 Flink版本:1.13.6 前置知识:源节点…...
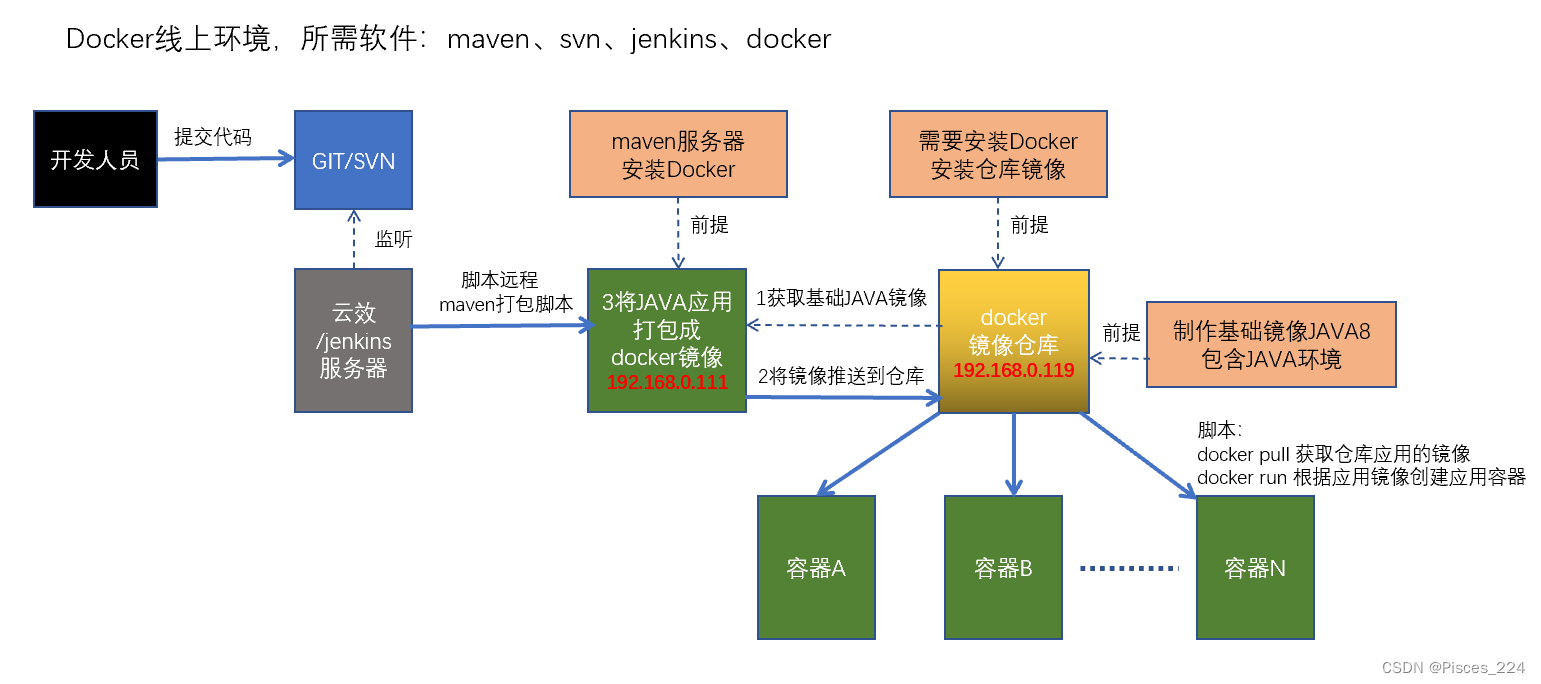
进阶:Docker容器管理工具——Docker-Compose使用
文章目录 前言Compose大杀器编排服务 1、docker-compose安装curl方式安装增加可执行权限查看版本 2、Docker-compose.yaml命令3、 docker-compose实战4、Docker网络路由docker的跨主机网络路由**问题由来**:方案两台机分别配置路由表ip_forward配置 总结 前言 容器的管理工具&…...
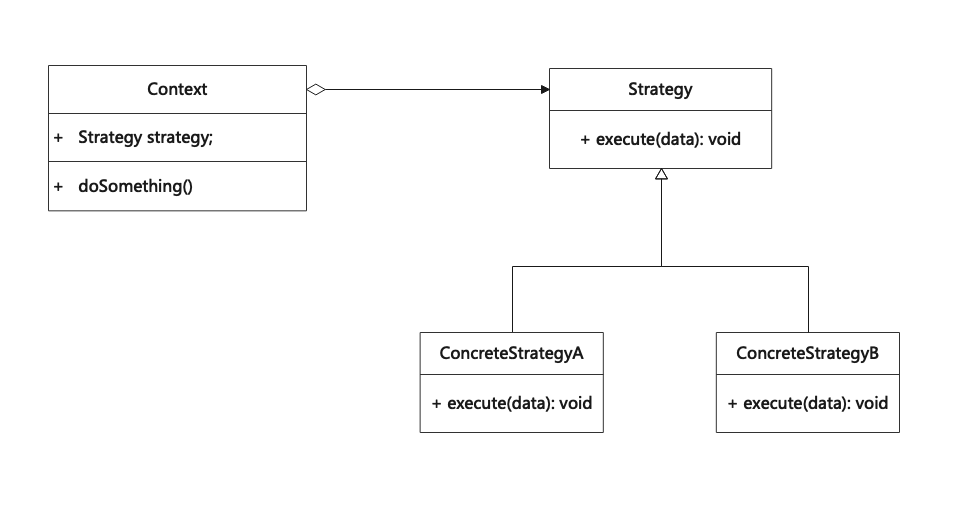
策略模式(Strategy)
策略模式是一种行为设计模式,就是定义一系列算法,然后将每一个算法封装起来,并使它们可相互替换。本模式通过定义一组可相互替换的算法,实现将算法独立于使用它的用户而变化。 Strategy is a behavioral design pattern that def…...
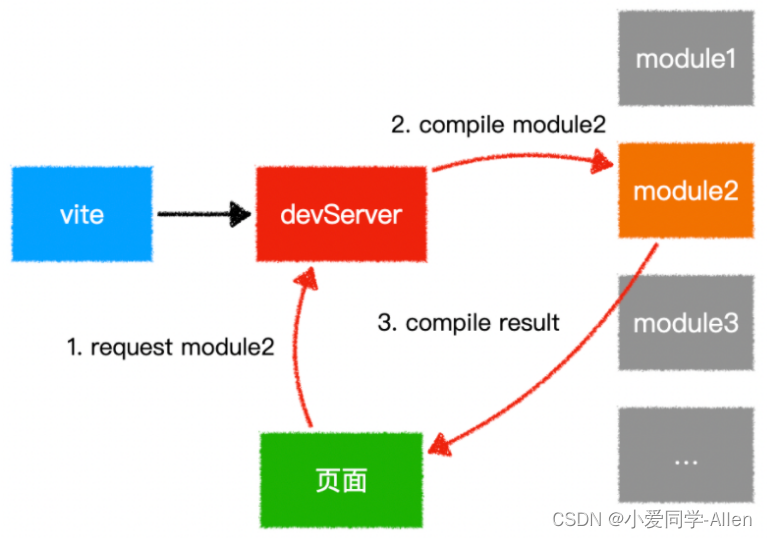
webpack基础知识十:与webpack类似的工具还有哪些?区别?
一、模块化工具 模块化是一种处理复杂系统分解为更好的可管理模块的方式 可以用来分割,组织和打包应用。每个模块完成一个特定的子功能,所有的模块按某种方法组装起来,成为一个整体(bundle) 在前端领域中,并非只有webpack这一款…...
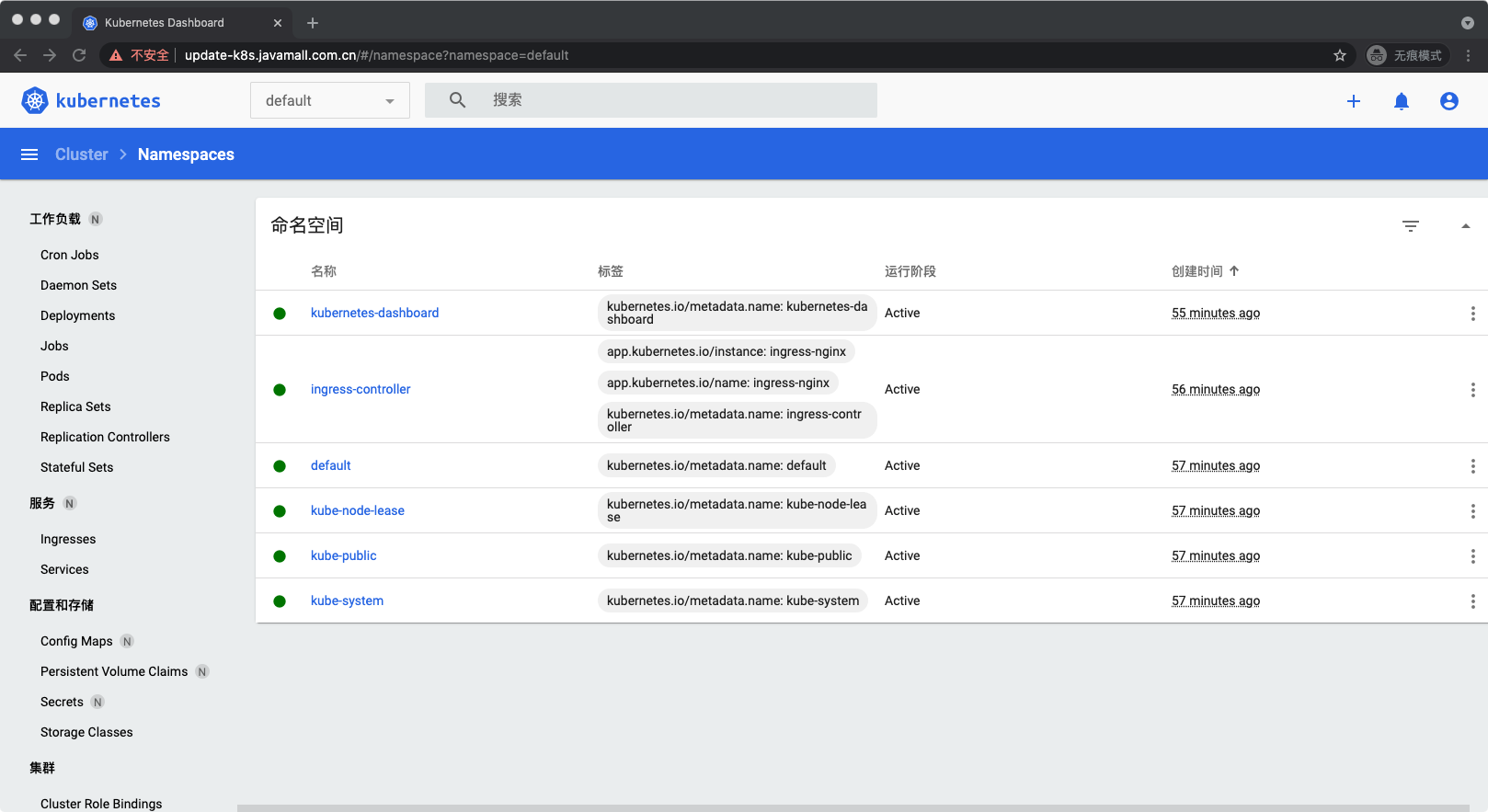
分享kubernetes部署:基于Ansible自动安装kubernetes
基于Ansible自动安装kubernetes 环境准备 我们以如下机器环境为例: 开放端口: 控制平面节点 工作节点 请按如上中规定的开放端口,或关闭防火墙: systemctlstopfirewalld&&\ systemctldisablefirewalld 安装常用工具 sudo…...

【Kubernetes部署篇】基于Ubuntu20.04操作系统搭建K8S1.23版本集群
文章目录 一、集群架构规划信息二、系统初始化准备(所有节点同步操作)三、安装kubeadm(所有节点同步操作)四、初始化K8S集群(master节点操作)五、添加Node节点到K8S集群中六、安装Calico网络插件七、测试CoreDNS可用性 一、集群架构规划信息 pod网段:10.244.0.0/16…...
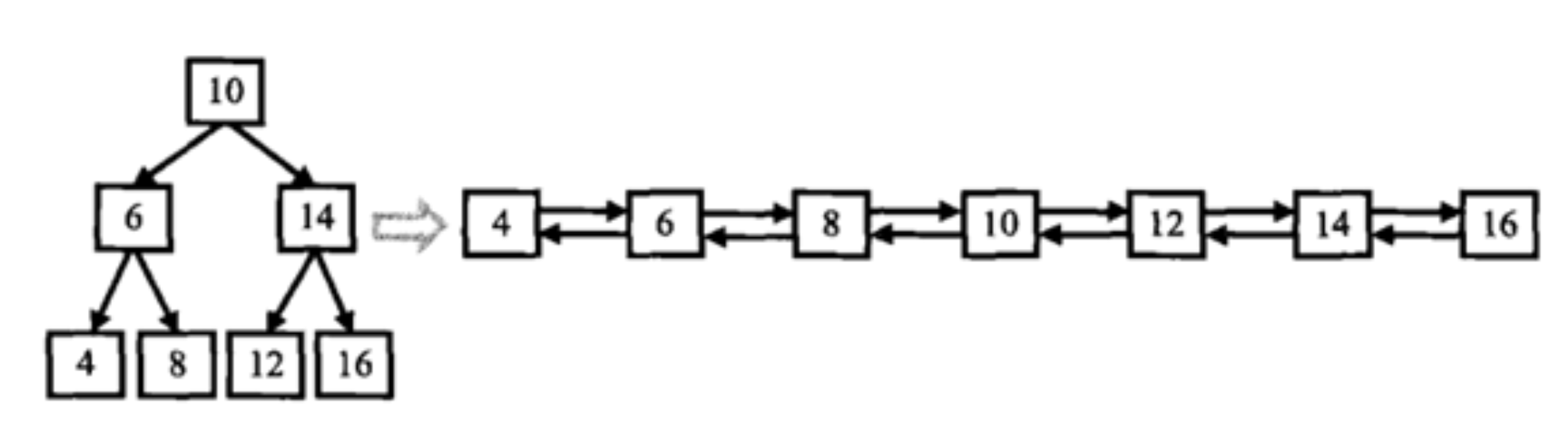
c++--二叉树应用
1.根据二叉树创建字符串 力扣 给你二叉树的根节点 root ,请你采用前序遍历的方式,将二叉树转化为一个由括号和整数组成的字符串,返回构造出的字符串。 空节点使用一对空括号对 "()" 表示,转化后需要省略所有不影响字符…...

以太网DHCP协议(十)
目录 一、工作原理 二、DHCP报文 2.1 DHCP报文类型 2.2 DHCP报文格式 当网络内部的主机设备数量过多是,IP地址的手动设置是一件非常繁琐的事情。为了实现自动设置IP地址、统一管理IP地址分配,TCPIP协议栈中引入了DHCP协议。 一、工作原理 使用DHCP之…...

企业服务器器中了360后缀勒索病毒怎么解决,勒索病毒解密数据恢复
随着网络威胁的增加,企业服务器成为黑客攻击的目标之一。近期,上海某知名律师事务所的数据库遭到了360后缀的勒索病毒攻击,导致企业服务器内的数据库被360后缀勒索病毒加密。许多重要的数据被锁定无法正常读取,严重影响了企业的正…...
详解Kafka分区机制原理|Kafka 系列 二
Kafka 系列第二篇,详解分区机制原理。为了不错过更新,请大家将本号“设为星标”。 点击上方“后端开发技术”,选择“设为星标” ,优质资源及时送达 上一篇文章介绍了 Kafka 的基本概念和术语,里面有个概念是 分区(Part…...

终极指南:如何免费解锁Cursor Pro完整功能 - 突破AI编辑器限制的完整方案
终极指南:如何免费解锁Cursor Pro完整功能 - 突破AI编辑器限制的完整方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youv…...

Solidworks PDM二次开发实战:文件夹权限与数据卡配置详解
1. Solidworks PDM二次开发入门指南 如果你正在使用Solidworks PDM管理产品数据,可能会遇到需要批量创建文件夹并设置权限的场景。比如新项目启动时,需要为不同部门创建标准化的文件夹结构,同时设置工程师只读、管理员完全控制的权限规则。手…...

Altium Designer实战:用xSignals搞定DDR4内存的等长布线,告别时序烦恼
Altium Designer实战:用xSignals实现DDR4内存精准等长布线 在高速PCB设计中,DDR4内存接口的布线一直是硬件工程师面临的技术高地。当信号速率突破2400MHz时,地址、命令与数据线之间哪怕几个ps的时序偏差都可能导致系统不稳定。传统手工计算网…...
)
告别串口线!用STM32CubeMX配置USB-CDC虚拟串口,实现与电脑免驱动通信(附Win7驱动安装指南)
STM32虚拟串口革命:USB-CDC免驱动通信全实战指南 嵌入式开发调试过程中,最令人头疼的莫过于频繁插拔串口线导致的接口松动、接触不良问题。传统串口调试不仅占用宝贵的UART资源,还常常因为物理连接问题浪费大量调试时间。本文将彻底改变这一局…...

实战指南:用UABEA高效解析Unity资源结构的5个关键要点
实战指南:用UABEA高效解析Unity资源结构的5个关键要点 【免费下载链接】UABEA c# uabe for newer versions of unity 项目地址: https://gitcode.com/gh_mirrors/ua/UABEA 在Unity开发的世界里,资源管理往往是项目优化中最棘手的一环。你是否曾经…...

Go语言AI编程助手SDK:提升Cursor代码理解与生成精准度
1. 项目概述:一个为AI编程而生的Go语言SDK如果你是一名Go语言开发者,同时又在深度使用Cursor这样的AI辅助编程工具,那么你很可能已经感受到了一个痛点:如何让AI更精准、更高效地理解你的代码库,并在此基础上进行智能操…...
技术解析与应用前景)
量子私有信息检索(QPIR)技术解析与应用前景
1. 量子私有信息检索技术概述量子私有信息检索(Quantum Private Information Retrieval, QPIR)是密码学领域的一项突破性技术,它允许用户从数据库中检索特定条目而不泄露被查询的是哪个条目。这项技术的核心价值在于解决了隐私保护与数据获取…...

Obsidian智能模板终极指南:3步打造高效笔记自动化系统
Obsidian智能模板终极指南:3步打造高效笔记自动化系统 【免费下载链接】Templater A template plugin for obsidian 项目地址: https://gitcode.com/gh_mirrors/te/Templater Templater插件是Obsidian生态系统中功能最强大的智能模板解决方案,它能…...

OpenClaw实战教程:声明式配置驱动的高效数据抓取方案
1. 项目概述:一个关于“OpenClaw”的实战教程 最近在GitHub上看到一个挺有意思的项目,叫“OpenClawTuto”。光看名字,你可能会有点摸不着头脑,这“OpenClaw”到底是个啥?是某种开源机械爪?还是一个代号&…...

Deep Lake:AI数据湖实战指南,解决深度学习数据管理难题
1. 项目概述:当数据湖遇上深度学习如果你在深度学习项目里被数据管理搞得焦头烂额过,那你肯定懂我在说什么。模型训练到一半,发现数据版本不对,或者想对海量图像、视频做快速查询和采样,结果被IO速度卡得死死的。传统的…...