pytorch零基础实现语义分割项目(二)——标签转换与数据加载
数据转换与加载
- 项目列表
- 前言
- 标签转换
- RGB标签到类别标签映射
- RGB标签转换成类别标签数据
- 数据加载
- 随机裁剪
- 数据加载
项目列表
语义分割项目(一)——数据概况及预处理
语义分割项目(二)——标签转换与数据加载
语义分割项目(三)——语义分割模型(U-net和deeplavb3+)
前言
在前面的文章中我们介绍了数据集的概况以及预处理,在训练之前除了数据预处理之外我们还需要对于标签进行处理,因为标签是以RGB格式存放的,我们需要把他们变换成常见的类别标签,并且因为语义分割问题是针对像素的分类,在数据量较大的情况下容易内存溢出(OOM),所以我们往往需要重写数据加载类针对大量数据进行加载。
标签转换
RGB标签到类别标签映射
我们知道RGB图像的数据点有三个通道,每个通道取值范围为0−2550-2550−255
即(0−255,0−255,0−255)(0-255, 0-255, 0-255)(0−255,0−255,0−255),那么我们可以考虑这样一个思路,我们设置一个长度为2553255^32553的向量,这样就可以容纳所有像素的取值范围。在之前的文章中我们定义了VOC_COLORMAP和VOC_CLASSES,对应着像素形式的类别和文字形式的类别
VOC_COLORMAP = [[226, 169, 41], [132, 41, 246], [110, 193, 228], [60, 16, 152], [254, 221, 58], [155, 155, 155]]
VOC_CLASSES = ['Water', 'Land (unpaved area)', 'Road', 'Building', 'Vegetation', 'Unlabeled']
那么我们构造一个voc_colormap2label函数,通过enumerate遍历VOC_COLORMAP获取索引与像素类别,并赋值colormap2label
def voc_colormap2label():colormap2label = torch.zeros(256 ** 3, dtype=torch.long)for i, colormap in enumerate(VOC_COLORMAP):colormap2label[(colormap[0] * 256 + colormap[1]) * 256 + colormap[2]] = ireturn colormap2label
RGB标签转换成类别标签数据
通过上面的函数我们可以获得RGB标签到类别标签的映射关系,那么我们在构造一个函数,传入RGB标签数据colormap和RGB标签向类别标签的映射colormap2label,返回值是类别标签。
def voc_label_indices(colormap, colormap2label):colormap = colormap.permute(1, 2, 0).numpy().astype('int32')idx = ((colormap[:, :, 0] * 256 + colormap[:, :, 1]) * 256 + colormap[:, :, 2])return colormap2label[idx]
数据加载
随机裁剪
由于输入图像的形状不能确定,并且有时图像太大会影响训练速度或者影响内存,所以我们需要对于图像和标签进行裁剪,我们调用torchvision.transforms.RandomCrop.get_params可以获取随机裁剪的区域(这一步的操作是为了使得数据和标签的区域匹配),然后我们使用torchvision.transforms.functional.crop可以进行数据和标签同步裁剪。
def voc_rand_crop(feature, label, height, width):rect = torchvision.transforms.RandomCrop.get_params(feature, (height, width))feature = torchvision.transforms.functional.crop(feature, *rect)label = torchvision.transforms.functional.crop(label, *rect)return feature, label
数据加载
我们简单介绍一下数据加载类SemanticDataset
| 函数名 | 用途 |
|---|---|
__init__ | 用于初始参数设置 |
normalize_image | 将图像设置成0-1范围内并进行normalize |
pad_params | 获取图像padding参数 |
pad_image | 根据pad参数padding图像 |
__getitem__ | 通过索引获取数据 |
__len__ | 获取数据长度 |
数据加载类的主要的思路是加载图像和标签,对于图像进行规范化(除以255以及normalize),如果图像过大进行裁剪,如果图像过小进行padding,对于标签我们调用之前的函数从RGB标签转换成类别标签
class SemanticDataset(torch.utils.data.Dataset):def __init__(self, is_train, crop_size, data_dir):self.transform = torchvision.transforms.Normalize(mean=[0.4813, 0.4844, 0.4919], std=[0.2467, 0.2478, 0.2542])self.crop_size = crop_sizeself.data_dir = data_dirself.is_train = is_trainself.colormap2label = voc_colormap2label()txt_fname = os.path.join(data_dir, 'train.txt' if self.is_train else 'test.txt')with open(txt_fname, 'r') as f:self.images = f.read().split()def normalize_image(self, img):return self.transform(img.float() / 255)def pad_params(self, crop_h, crop_w, img_h, img_w):hight = max(crop_h, img_h)width = max(crop_w, img_w)y_s = (hight - img_h) // 2x_s = (width - img_w) // 2return hight, width, y_s, x_sdef pad_image(self, hight, width, y_s, x_s, feature):zeros = torch.zeros((feature.shape[0], hight, width))zeros[:, y_s:y_s + feature.shape[1], x_s:x_s + feature.shape[2]] = featurereturn zerosdef __getitem__(self, idx):mode = torchvision.io.image.ImageReadMode.RGBfeature = torchvision.io.read_image(os.path.join(self.data_dir, 'images', '{:03d}.jpg'.format(int(self.images[idx]))))label = torchvision.io.read_image(os.path.join(self.data_dir, 'labels', '{:03d}.png'.format(int(self.images[idx]))), mode)c_h, c_w, f_h, f_w = self.crop_size[0], self.crop_size[1], feature.shape[1], feature.shape[2]if f_h < c_h or f_w < c_w:higth, width, y_s, x_s = self.pad_params(c_h, c_w, f_h, f_w)feature = self.pad_image(higth, width, y_s, x_s, feature)label = self.pad_image(higth, width, y_s, x_s, label)feature = self.normalize_image(feature) feature, label = voc_rand_crop(feature, label,*self.crop_size)label = voc_label_indices(label, self.colormap2label)return (feature, label)def __len__(self):return len(self.images)
使用torch.utils.data.DataLoader批量加载数据
def load_data_voc(batch_size, crop_size, data_dir = './dataset'):train_iter = torch.utils.data.DataLoader(SemanticDataset(True, crop_size, data_dir), batch_size, shuffle=True, drop_last=True)test_iter = torch.utils.data.DataLoader(SemanticDataset(False, crop_size, data_dir), batch_size, shuffle=False, drop_last=True)return train_iter, test_iter
相关文章:
——标签转换与数据加载)
pytorch零基础实现语义分割项目(二)——标签转换与数据加载
数据转换与加载项目列表前言标签转换RGB标签到类别标签映射RGB标签转换成类别标签数据数据加载随机裁剪数据加载项目列表 语义分割项目(一)——数据概况及预处理 语义分割项目(二)——标签转换与数据加载 语义分割项目&#x…...

python(8.5)--列表习题
目录 一、求输出结果题 二、计算列表元素个数 三、查找是否存在某元素 四、删除某元素 五、如何在列表中插入元素 六、如何从列表中删除重复的元素 七、 如何将列表中的元素按照从小到大的顺序排序 八、从列表中删除重复的元素 九、大到小的顺序排序 一、求输出结…...
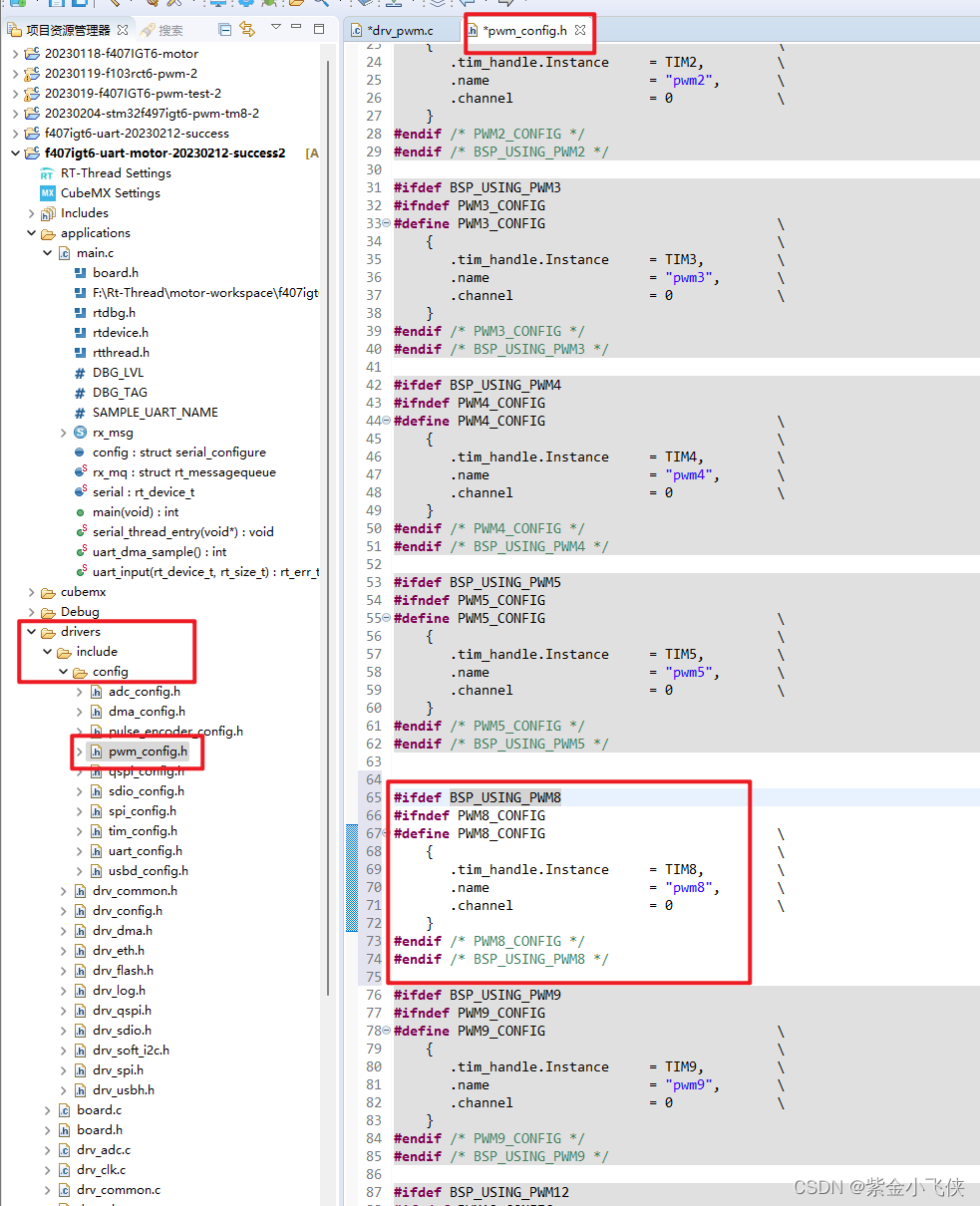
rt-thread pwm 多通道
一通道pwm参考 https://blog.csdn.net/yangshengwei230612/article/details/128738351?spm1001.2014.3001.5501 以下主要是多通道与一通道的区别 芯片 stm32f407rgt6 1、配置PWM设备驱动相关宏定义 添加PWM宏定义 #define BSP_USING_PWM8 #define BSP_USING_PWM8_CH1 #d…...

C语言练习 | 初学者经典练习汇总
目录 1、下面代码输出多少,为什么? 2、你要好好学习么? 3、一直写代码, 4、两个数求最大值 5、输入1-5输出工作日,输入6-7输出休息日,其他输入错误 6、写一个输入密码的代码 7、怎么样当输入数字时候…...
 | 机试题算法思路 【2023】)
华为OD机试 - 自动曝光(Python) | 机试题算法思路 【2023】
最近更新的博客 华为OD机试 - 卡片组成的最大数字(Python) | 机试题算法思路 华为OD机试 - 网上商城优惠活动(一)(Python) | 机试题算法思路 华为OD机试 - 统计匹配的二元组个数(Python) | 机试题算法思路 华为OD机试 - 找到它(Python) | 机试题算法思路 华为OD机试…...

「6」线性代数(期末复习)
🚀🚀🚀大家觉不错的话,就恳求大家点点关注,点点小爱心,指点指点🚀🚀🚀 目录 第五章 相似矩阵及二次型 &2)方阵的特征值与特征向量 &3ÿ…...
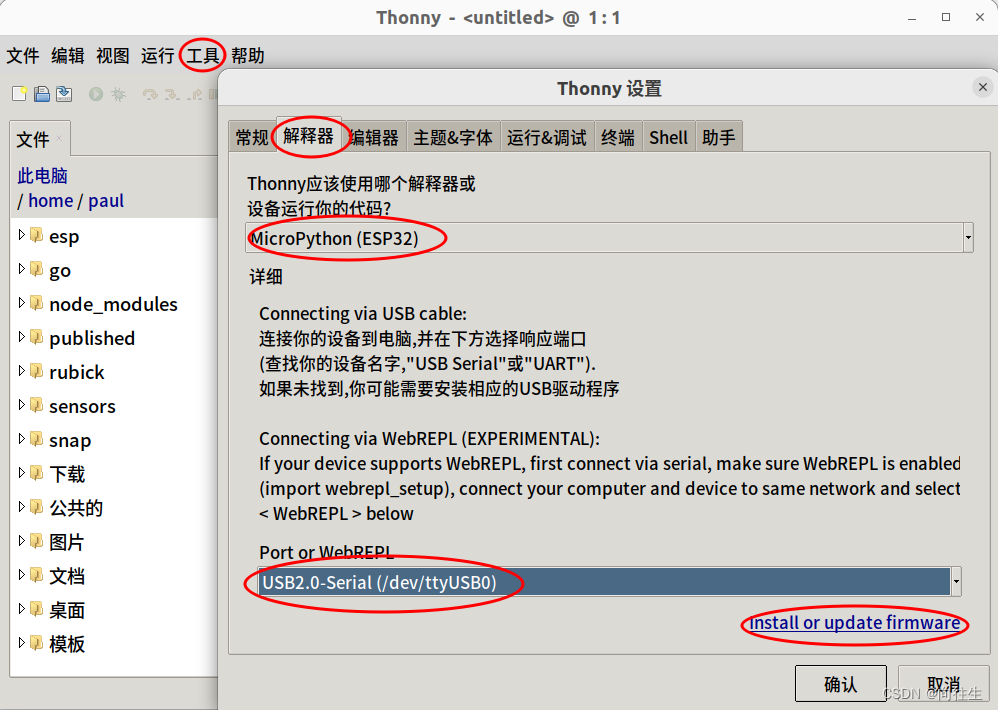
1.1 硬件与micropython固件烧录及自编译固件
1.ESP32硬件和固件 淘宝搜ESP32模块,20-50元都有,自带usb口,即插即用. 固件下载地址:MicroPython - Python for microcontrollers 2.烧录方法 为简化入门难度,建议此处先使用带GUI的开发工具THonny,记得不是给你理发的tony老师. 烧录的入口是: 后期通过脚本一次型生成和烧…...
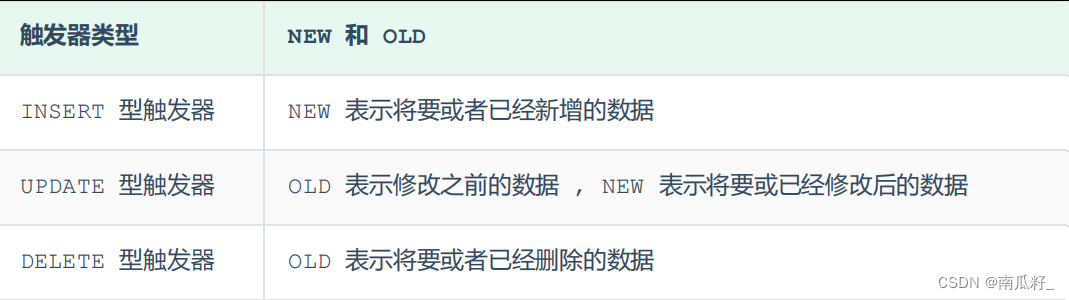
【MySQL进阶】视图 存储过程 触发器
😊😊作者简介😊😊 : 大家好,我是南瓜籽,一个在校大二学生,我将会持续分享Java相关知识。 🎉🎉个人主页🎉🎉 : 南瓜籽的主页…...

[Linux篇] Linux常见命令和权限
文章目录使用XShell登录Linux1.Linux常用基本命令:1.1 ls(列出当前的目录下都有哪些文件和目录)1.2 cd (change directory 切换目录)1.3 pwd(查看当前目录的绝对路径)1.4 touch(创建文件)1.5 ca…...

29岁从事功能测试被辞,面试2个月都找不到工作吗?
最近一个28岁老同学联系我,因为被公司辞退,找我倾诉,于是写下此文。 他是14年二本毕业,在我的印象里人特别懒,不爱学习,专业不好,毕业前因为都没找到合适工作,直接去创业了…...

【C#个人错题笔记1】
观前提醒 记录一些我不会或者少见的内容,不一定适合所有人 字符串拼接 int a3,b8; Console.WriteLine(ab);//11 Console.WriteLine("ab");//ab Console.WriteLine(a""b);//38 Console.WriteLine("ab"ab);//ab38 Console.WriteLine…...

基于lambda的mongodb查询插件
需求背景需要一个像mybatis plus 一样的基于lambda, 且面向对象的查询mongo数据的插件。在网上找了很久,没有发现有类似功能的插件。于是自己手写了一个,借助mongoTemplate屏蔽了底层查询语句的实现细节。在此基础上,实现了查询的统一封装。技…...
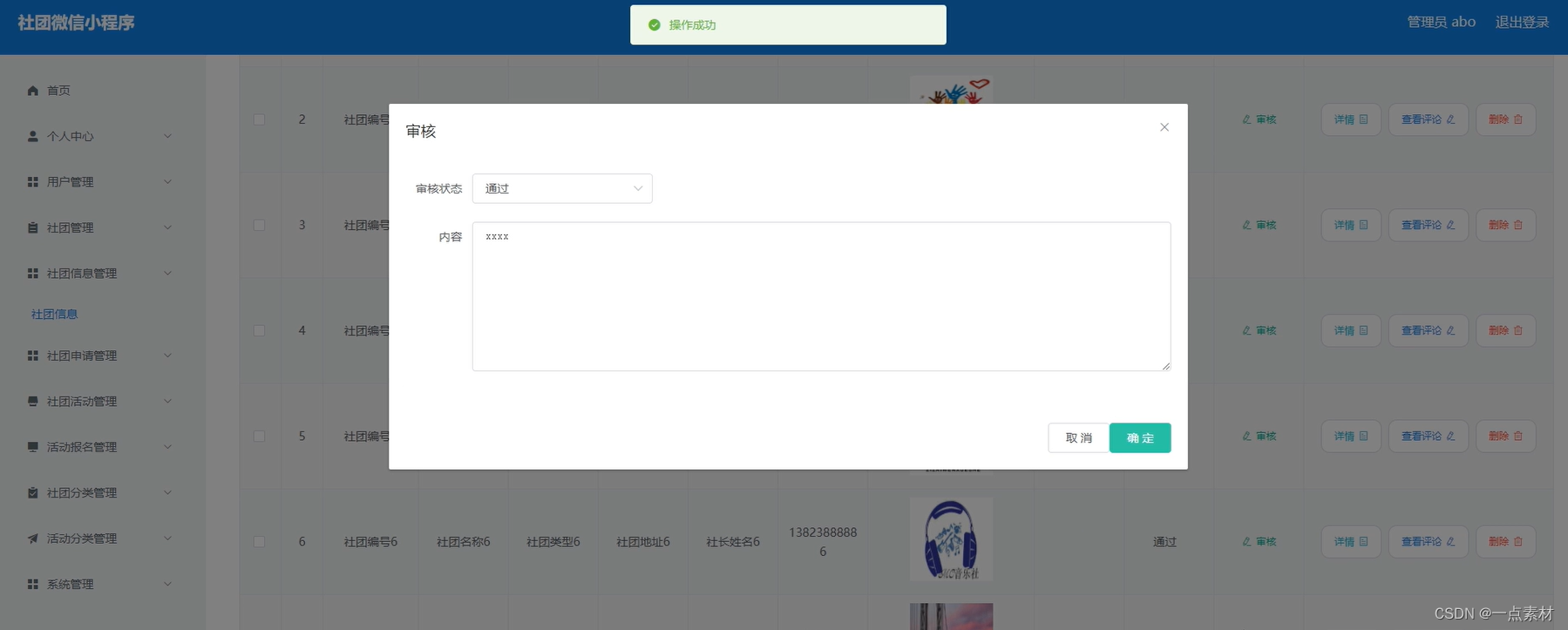
基于微信小程序的微信社团小程序
文末联系获取源码 开发语言:Java 框架:ssm JDK版本:JDK1.8 服务器:tomcat7 数据库:mysql 5.7/8.0 数据库工具:Navicat11 开发软件:eclipse/myeclipse/idea Maven包:Maven3.3.9 浏览器…...
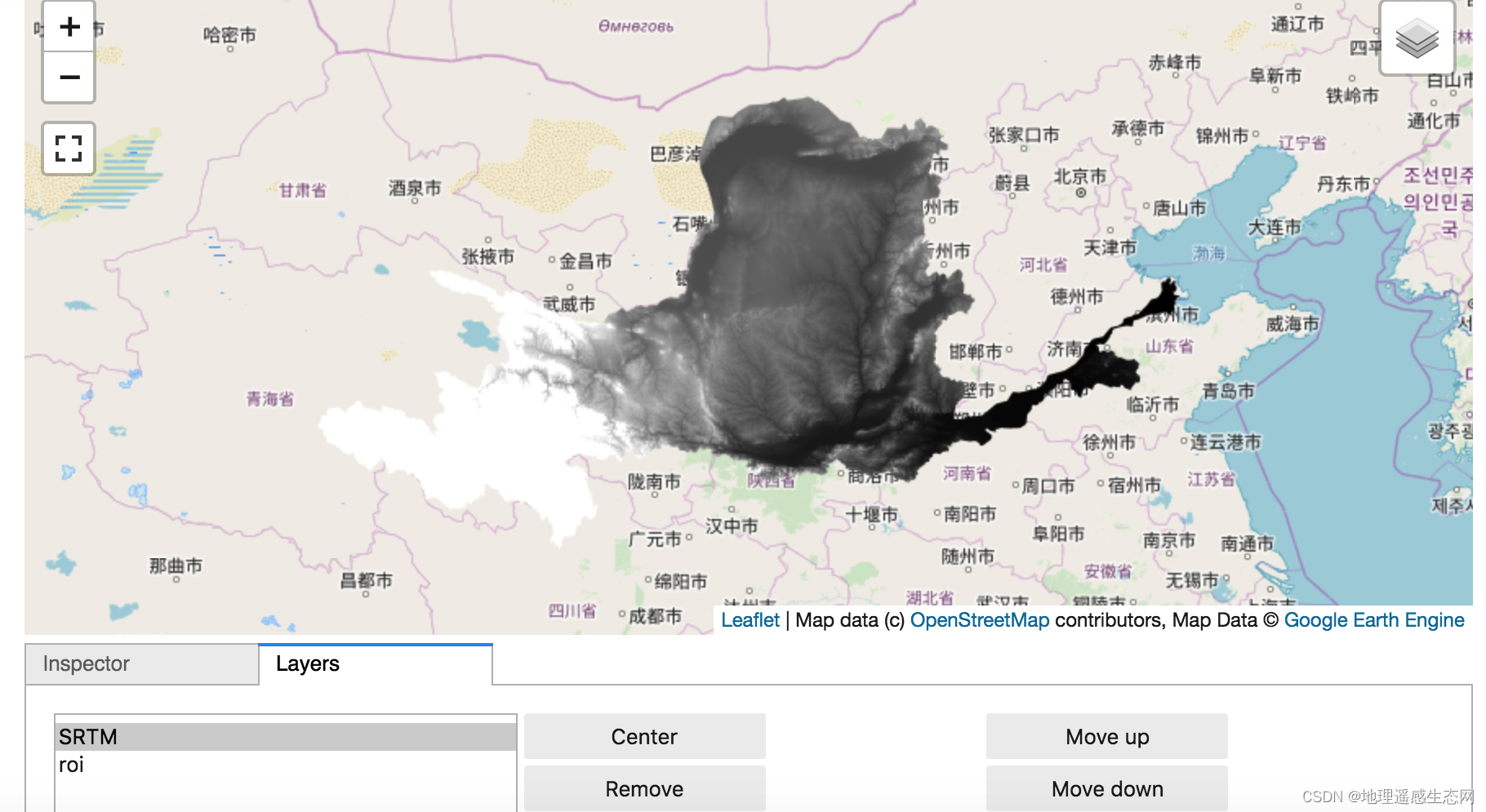
GEE学习笔记 七十三:【GEE之Python版教程七】静态展示影像和动态展示影像
我们使用GEE在线编辑可以直接通过在线的网页可以加载展示我们计算的结果,而python版的GEE要展示我们的计算结果可能就比较麻烦。如果有同学看过GEE的python版API中可以找到一个类ee.mapclient,这个类的介绍是它是GEE官方通过Tk写的一个加载展示地图的类。…...
PGLBox全面解决图训练速度、成本、稳定性、复杂算法四大问题!
图神经网络(Graph Neural Network,GNN)是近年来出现的一种利用深度学习直接对图结构数据进行学习的方法,通过在图中的节点和边上制定聚合的策略,GNN能够学习到图结构数据中节点以及边内在规律和更加深层次的语义特征。…...
使用入门篇)
超详细的 pytest 教程(一)使用入门篇
前言 pytest到目前为止还没有翻译的比较好全面的使用文档,很多英文不太好的小伙伴,在学习时看英文文档还是很吃力。本来去年就计划写pytest详细的使用文档的,由于时间关系一直搁置,直到今天才开始写。本文是第一篇,主…...
二叉树理论基础知识点
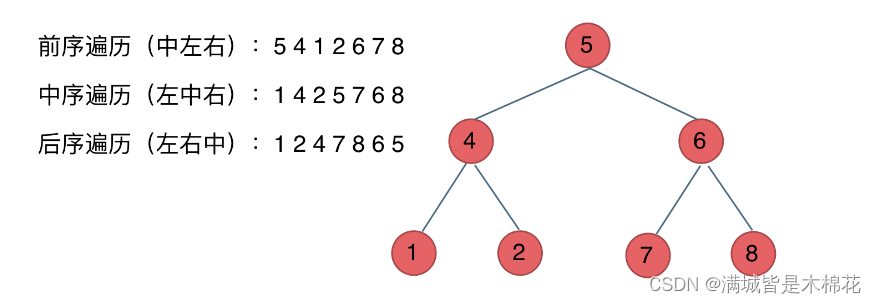
二叉树的种类 在我们解题过程中二叉树有两种主要的形式:满二叉树和完全二叉树 满二叉树 满二叉树:如果一棵二叉树只有度为0的结点和度为2的结点,并且度为0的结点在同一层上,则这棵二叉树为满二叉树。 如图所示: 这…...
【算法基础】堆⭐⭐⭐
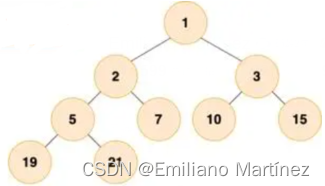
一、堆 1. 堆的概念 堆(heap)是计算机科学中一类特殊的数据结构的统称。堆通常是一个可以被看做一棵树的数组对象。堆总是满足下列性质: (1)堆中某个结点的值总是不大于或不小于其父结点的值; (2)堆总是一棵完全二叉树。 将根结点最大的堆叫做最大堆或大根堆,根结点…...

时序预测 | MATLAB实现CNN-SVM卷积支持向量机时间序列预测
时序预测 | MATLAB实现CNN-SVM卷积支持向量机时间序列预测 目录时序预测 | MATLAB实现CNN-SVM卷积支持向量机时间序列预测预测效果基本介绍研究回顾程序设计参考资料预测效果 基本介绍 CNN-SVM预测模型将深度学习模型作为特征学习器,将SVM 支持向量机 作为训练器进行…...
【TypeScrip】TypeScrip的任意类型(Any 类型 和 unknown 顶级类型):
文章目录一、安转依赖:【1】nodejs 环境执行ts【2】使用ts-node二、Any 类型 和 unknown 顶级类型【1】没有强制限定哪种类型,随时切换类型都可以 我们可以对 any 进行任何操作,不需要检查类型【2】声明变量的时候没有指定任意类型默认为any【…...

电子防盗扣用钢丝绳的抗拉强度与直径的关联规律
引言钢丝绳在现代工业领域中扮演着至关重要的角色。从大型机械设备到精细的电子防盗扣,钢丝绳凭借其独特的性能,保障着各类设备的稳定运行。在电子防盗扣的应用场景中,钢丝绳的抗拉强度直接关系到防盗扣的可靠性和安全性,而其直径…...
)
别再手动画图了!用Python ASE + Matplotlib一键生成高质量材料结构图(附完整代码)
科研绘图革命:用Python ASEMatplotlib实现材料结构可视化自动化 深夜的实验室里,屏幕荧光映照着一张疲惫的脸——这可能是许多材料科学研究者共同的记忆。当你在论文截稿日前夕,还在反复调整VESTA中的原子位置、尝试各种角度截图时࿰…...

【实战指南】YOLOv5适配VisDrone:从数据转换到模型训练全流程解析
1. 为什么选择YOLOv5处理VisDrone数据集 VisDrone作为目前最大的公开无人机航拍数据集,包含了各种复杂场景下的目标检测任务。但直接将YOLOv5用于VisDrone会遇到几个典型问题:首先是数据格式差异,VisDrone采用类似PASCAL VOC的标注方式&#…...
linux删除无用依赖 —东方仙盟)
服务器运维(四十八)linux删除无用依赖 —东方仙盟
一、逐条安全性分析1. sudo dnf autoremove -y作用:删掉安装软件后遗留的无用依赖包风险:极低禁忌:你现在只跑 nginxmysqllua,没有冷门依赖,随便跑效果:清大量残留库、编译依赖2. sudo dnf clean all作用&a…...
)
GDB调试实战:如何像本地变量一样轻松查看函数参数和结构体成员(附常用命令清单)
GDB调试实战:像本地变量一样高效查看函数参数与复杂数据结构 调试大型C/C项目时,最令人头疼的莫过于面对层层嵌套的函数调用和包含数十个成员的结构体。传统调试方式往往让我们陷入内存地址的泥潭,而GDB提供的诸多高级功能可以彻底改变这一局…...

如何快速掌握TreeViewer:系统发育树可视化工具的完整指南
如何快速掌握TreeViewer:系统发育树可视化工具的完整指南 【免费下载链接】TreeViewer Cross-platform software to draw phylogenetic trees 项目地址: https://gitcode.com/gh_mirrors/tr/TreeViewer TreeViewer是一款功能强大的跨平台系统发育树可视化软件…...

设计器模版底图,一直渲染错误,是因为第一张图变形后内存中图片数据被改了,其他尺码一直错误
这其实是你们现在更需要的组合:不是只看 decode(),而是再确认“这次 decode 对应的还是当前这张图”。再确认“这次 decode 对应的还是当前这张图” 是怎么做到的,详细列举代码我直接从现在这次改动的代码里,把"确认图片身份…...

斯坦福CS229机器学习中文教程:从零到一的实战学习指南
斯坦福CS229机器学习中文教程:从零到一的实战学习指南 【免费下载链接】Stanford-CS-229 A Chinese Translation of Stanford CS229 notes 斯坦福机器学习CS229课程讲义的中文翻译 项目地址: https://gitcode.com/gh_mirrors/st/Stanford-CS-229 你是否曾因英…...

AI编程助手规则动态管理:Cursor智能规则引擎实战指南
1. 项目概述:一个为AI编程助手“量身定制”的规则管家如果你和我一样,日常重度依赖 Cursor 这类 AI 编程助手来提升开发效率,那你肯定也遇到过类似的困扰:项目初期精心编写的.cursorrules文件,随着项目迭代、新成员加入…...

动态未知环境下无人机轨迹规划技术SANDO解析
1. 动态未知环境中的轨迹规划挑战在机器人自主导航领域,动态未知环境下的轨迹规划一直是个棘手问题。想象一下无人机在密集城市环境中穿行,既要避开突然出现的行人车辆,又要应对GPS信号丢失和传感器视野受限的情况。传统规划方法通常需要精确…...