ubuntu clion从0开始搭建一个风格转换ONNX推理网络 opencv cuda::dnn::net
系统搭建
- 系统搭建
OpenCV的安装
cmake
sudo apt-get install cmake
其他环境以来
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff5.dev libswscale-dev libjasper-dev
- 不安装会报这个错误
OpenCV(4.6.0) /home/dell/下载/opencv-4.6.0/modules/highgui/src/window.cpp:1250: error: (-2:Unspecified error) The function is not implemented. Rebuild the library with Windows, GTK+ 2.x or Cocoa support. If you are on Ubuntu or Debian, install libgtk2.0-dev and pkg-config, then re-run cmake or configure script in function 'cvNamedWindow'
error
- E: 无法定位软件包 libjasper-dev
解决(换源重新安装)
- http://mirrors.ustc.edu.cn/help/ubuntu.html
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
- 由于没有公钥,无法验证下列签名: NO_PUBKEY 40976EAF437D05B5 NO_PUBKEY 3B4FE6AC
sudo apt-key adv --recv-keys --keyserver keyserver.ubuntu.com 40976EAF437D05B5 3B4FE6ACC0B21F32
下载源码
https://github.com/opencv/opencv/releases
增强模块 https://github.com/opencv/opencv_contrib/tags
安装
unzip opencv-4.6.0.zipunzip opencv_contrib-4.6.0.zipcd opencv-4.6.0/sudo mkdir buildcd buildsudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local
或sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH= **/opencv_contrib-4.6.0/modules/ ..
error
- 如果报错
CMake Error: The source directory "/home/dell/下载/opencv-4.6.0/build" does not appear to contain CMakeLists.txt.使用sudo cmake /home/dell/下载/opencv-4.6.0/ -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local
sudo make或sudo make -j4j为变异是使用的核心数量,这一步非常满sudo make install
-- Installing: /usr/local/share/opencv4/lbpcascades/lbpcascade_profileface.xml
-- Installing: /usr/local/share/opencv4/lbpcascades/lbpcascade_silverware.xml
-- Installing: /usr/local/bin/opencv_annotation
-- Set runtime path of "/usr/local/bin/opencv_annotation" to "/usr/local/lib"
-- Installing: /usr/local/bin/opencv_visualisation
-- Set runtime path of "/usr/local/bin/opencv_visualisation" to "/usr/local/lib"
-- Installing: /usr/local/bin/opencv_interactive-calibration
-- Set runtime path of "/usr/local/bin/opencv_interactive-calibration" to "/usr/local/lib"
-- Installing: /usr/local/bin/opencv_version
-- Set runtime path of "/usr/local/bin/opencv_version" to "/usr/local/lib"
-- Installing: /usr/local/bin/opencv_model_diagnostics
-- Set runtime path of "/usr/local/bin/opencv_model_diagnostics" to "/usr/local/lib"环境变量
sudo vim /etc/ld.so.conf.d/opencv.confi/usr/local/lib+ esc + :wq + enter

sudo ldconfigsudo vim /etc/bash.bashrc
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
sudo updatedb
或者按照这种方式配置
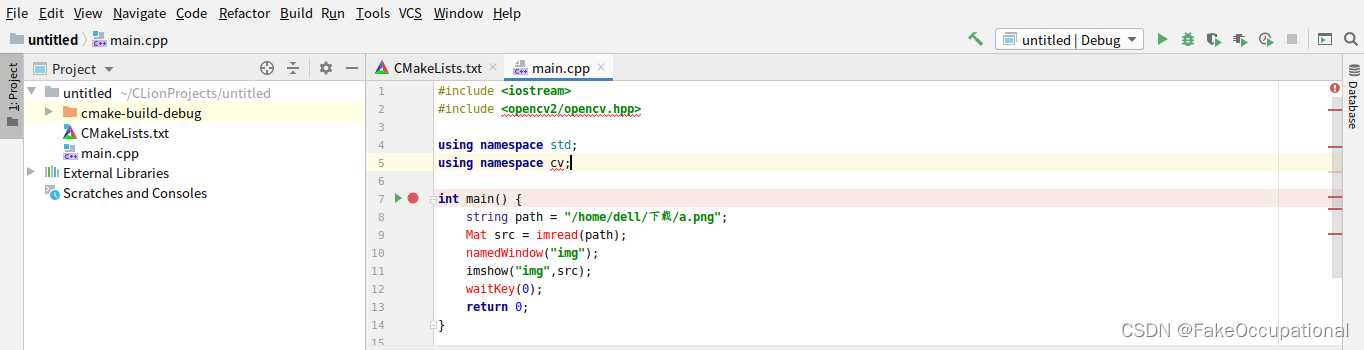
测试
cmake_minimum_required(VERSION 3.15)
project(untitled)
set(CMAKE_CXX_STANDARD 14)MESSAGE(STATUS "Project: untitled") #打印相关消息消息
find_package(OpenCV REQUIRED)# 通过find_package引入非官方的库(该方式只对支持cmake编译安装的库有效)
set(SOURCE_FILES main.cpp)
include_directories(${OpenCV_INCLUDE_DIRS})add_executable(untitled main.cpp)
target_link_libraries(untitled ${OpenCV_LIBS})
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;int main() {string path = "/home/dell/下载/a.png";Mat src = imread(path);namedWindow("img");imshow("img",src);waitKey(0);return 0;
}
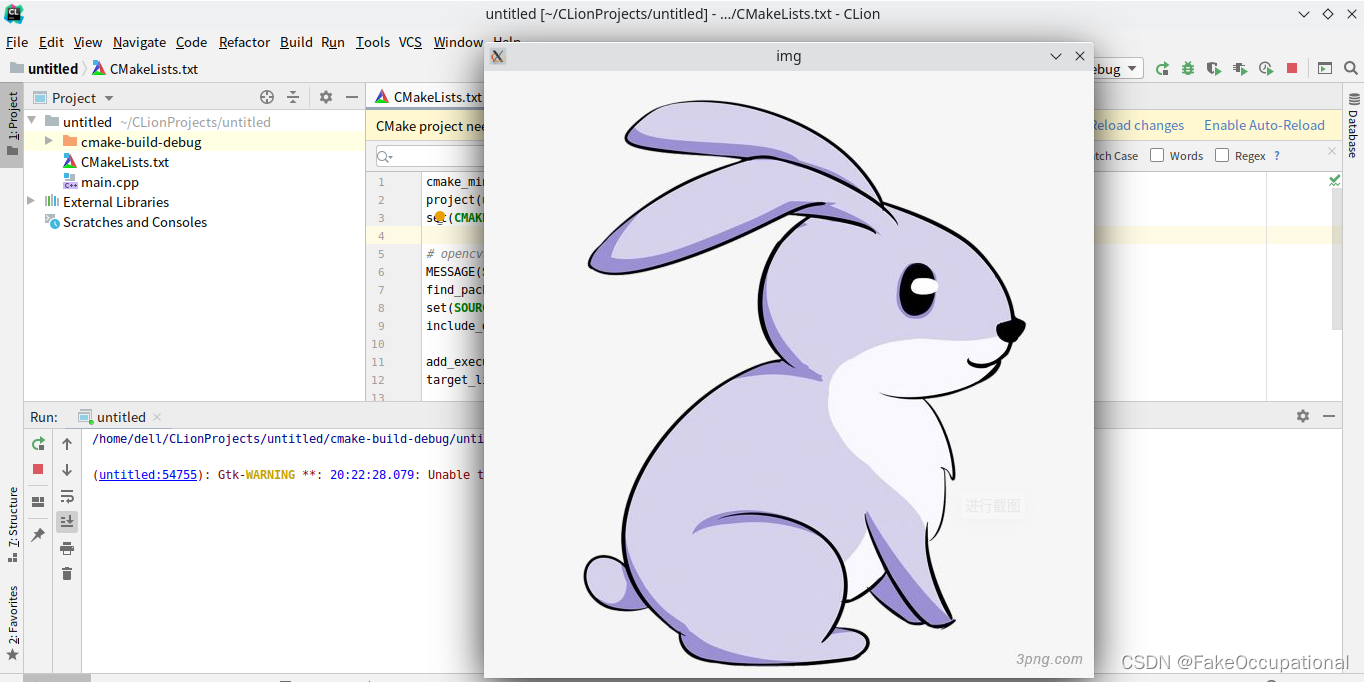
- 重启一下就ok了
- 结果
onnx
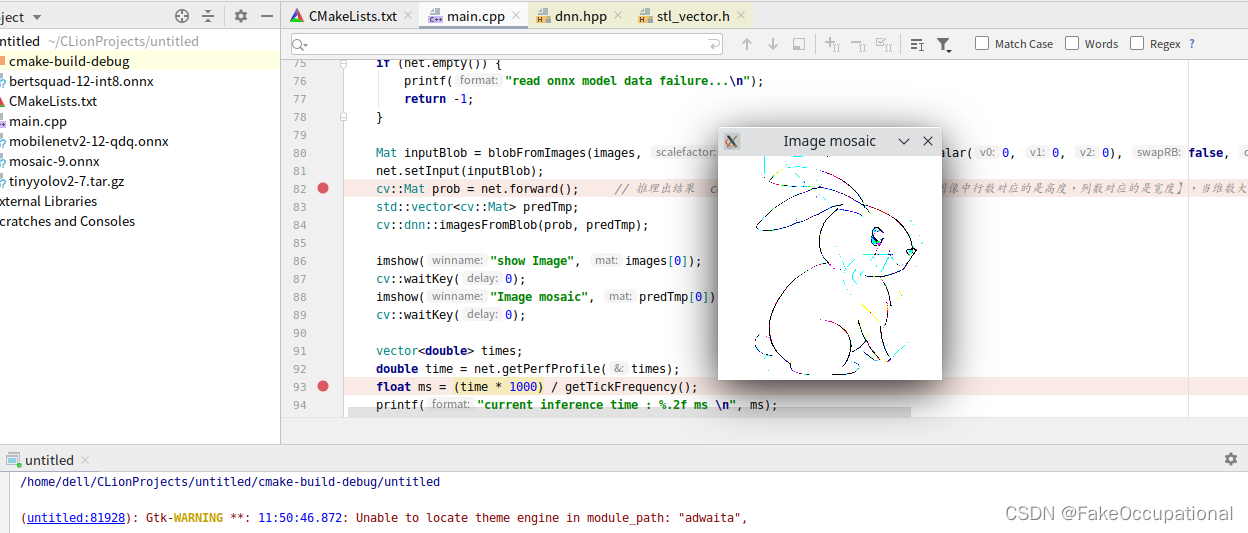
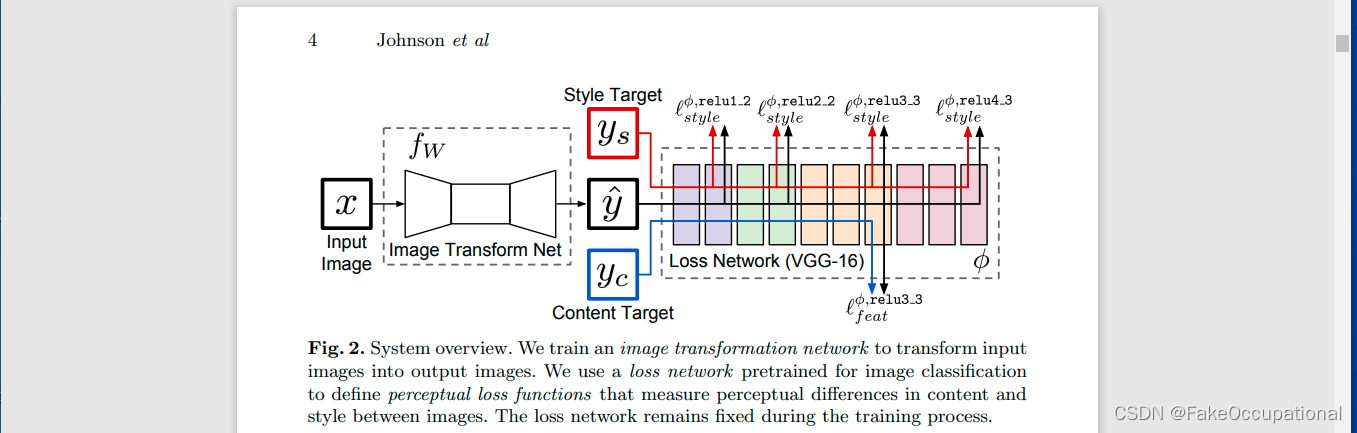
效果风格转换
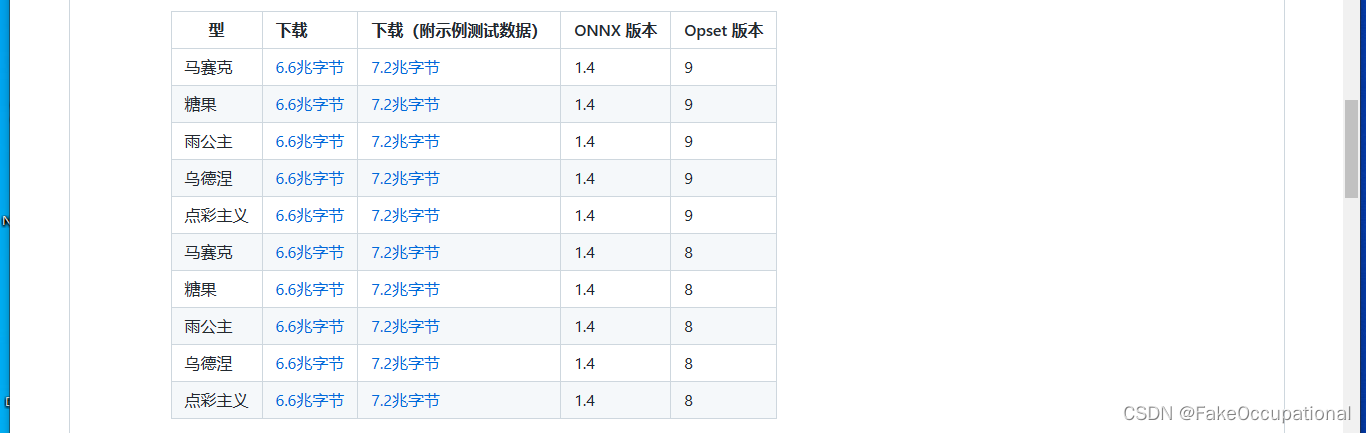
网络的论文和ONNX下载

- 下载地址
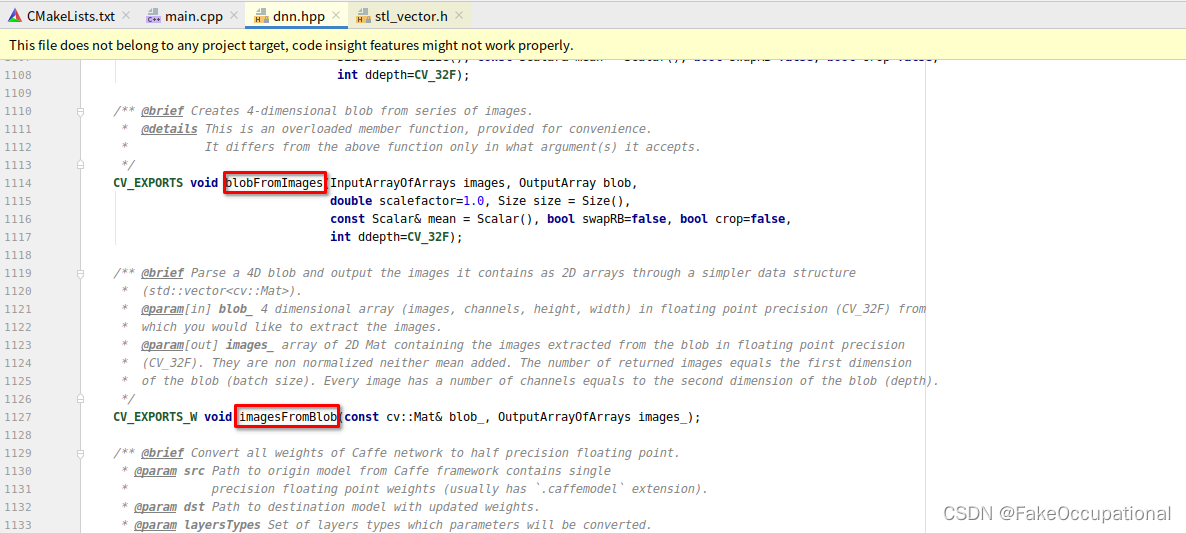
blobFromImages(blobFromImage) + imagesFromBlob
处理图像到blob,[0, 255] ->[0, 1],大小,RGB->BGR和转换forward的blob到图像。
网络传播整体代码
cmake_minimum_required(VERSION 3.15)
project(untitled)
set(CMAKE_CXX_STANDARD 14)MESSAGE(STATUS "Project: untitled")
find_package(OpenCV REQUIRED)
set(SOURCE_FILES main.cpp)
include_directories(${OpenCV_INCLUDE_DIRS})add_executable(untitled main.cpp)
target_link_libraries(untitled ${OpenCV_LIBS})
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <iostream>
#include <fstream>using namespace cv;
using namespace cv::dnn;
using namespace std;// 图像处理 标准化处理
void PreProcess(const Mat& image, Mat& image_blob)
{Mat input;image.copyTo(input);//数据处理 标准化std::vector<Mat> channels, channel_p;split(input, channels);Mat R, G, B;B = channels.at(0);G = channels.at(1);R = channels.at(2);B = (B / 255. - 0.406) / 0.225;G = (G / 255. - 0.456) / 0.224;R = (R / 255. - 0.485) / 0.229;channel_p.push_back(R);channel_p.push_back(G);channel_p.push_back(B);Mat outt;merge(channel_p, outt);image_blob = outt;
}String bin_model = "/home/dell/CLionProjects/untitled/mosaic-9.onnx";
int main(int argc, char** argv) {//数据处理Mat test = Mat::zeros(10,10, CV_64FC1 );Mat image1 = imread("/home/dell/下载/a.png");resize(image1, image1, Size(256, 256), INTER_AREA);image1.convertTo(image1, CV_32FC3);// convertTo()数据类型CV_32FC3PreProcess(image1, image1);vector<Mat> images;images.push_back(image1);images.push_back(image1);int w = 224;int h = 224;// 加载网络cv::dnn::Net net = cv::dnn::readNetFromONNX(bin_model); // 加载训练好的识别模型 net = cv2.dnn.readNetFromONNX('**.onnx')net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);if (net.empty()) {printf("read onnx model data failure...\n");return -1;}Mat inputBlob = blobFromImages(images, 1.0, Size(w, h), Scalar(0, 0, 0), false, true);net.setInput(inputBlob);cv::Mat prob = net.forward(); // 推理出结果 cols,rows 矩阵的行数,列数【注意,在图像中行数对应的是高度,列数对应的是宽度】,当维数大于2时,均为-1; std::vector<cv::Mat> predTmp;cv::dnn::imagesFromBlob(prob, predTmp);imshow("show Image", images[0]);cv::waitKey(0);imshow("Image mosaic", predTmp[0]);cv::waitKey(0);vector<double> times;double time = net.getPerfProfile(times);float ms = (time * 1000) / getTickFrequency();printf("current inference time : %.2f ms \n", ms);return 0;
}
CG
- clion中debug不生效
代码 onnx+ opdncv+vgg16
// https://blog.csdn.net/qq_44747572/article/details/121467657
// /home/dell/下载/opencv-4.6.0/samples/data/dnn/classification_classes_ILSVRC2012.txt#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <iostream>
#include <fstream>using namespace cv;
using namespace cv::dnn;
using namespace std;// 图像处理 标准化处理
void PreProcess(const Mat& image, Mat& image_blob)
{Mat input;image.copyTo(input);//数据处理 标准化std::vector<Mat> channels, channel_p;split(input, channels);Mat R, G, B;B = channels.at(0);G = channels.at(1);R = channels.at(2);B = (B / 255. - 0.406) / 0.225;G = (G / 255. - 0.456) / 0.224;R = (R / 255. - 0.485) / 0.229;channel_p.push_back(R);channel_p.push_back(G);channel_p.push_back(B);Mat outt;merge(channel_p, outt);image_blob = outt;
}std::vector<String> readClassNames(string labels_txt_file)
{std::vector<String> classNames;std::ifstream fp(labels_txt_file);if (!fp.is_open()){printf("could not open file...\n");exit(-1);}std::string name;while (!fp.eof()){std::getline(fp, name);if (name.length())classNames.push_back(name);}fp.close();return classNames;
}String bin_model = "/home/dell/下载/vgg16.onnx";
String labels_txt_file = "/home/dell/下载/opencv-4.6.0/samples/data/dnn/classification_classes_ILSVRC2012.txt";
vector<String> readClassNames(); // string对象作为vector对象
int main(int argc, char** argv) {Mat image1 = imread("/home/dell/下载/a.png");//用于显示vector<Mat>Showimages;Showimages.push_back(image1);//处理image1resize(image1, image1, Size(256, 256), INTER_AREA);image1.convertTo(image1, CV_32FC3);PreProcess(image1, image1); //标准化处理//将image1和image2合并到imagesvector<Mat> images;images.push_back(image1);images.push_back(image1);vector<String> labels = readClassNames(labels_txt_file);int w = 224;int h = 224;// 加载网络cv::dnn::Net net = cv::dnn::readNetFromONNX(bin_model); // 加载训练好的识别模型if (net.empty()) {printf("read onnx model data failure...\n");return -1;}Mat inputBlob = blobFromImages(images, 1.0, Size(w, h), Scalar(0, 0, 0), false, true);// 执行图像分类net.setInput(inputBlob);cv::Mat prob = net.forward(); // 推理出结果cout << prob.cols<< endl;vector<double> times;double time = net.getPerfProfile(times);float ms = (time * 1000) / getTickFrequency();printf("current inference time : %.2f ms \n", ms);// 得到最可能分类输出for (int n = 0; n < prob.rows; n++) {Point classNumber;double classProb;Mat probMat = prob(Rect(0, n, 1000, 1)).clone();Mat result = probMat.reshape(1, 1);minMaxLoc(result, NULL, &classProb, NULL, &classNumber);int classidx = classNumber.x;printf("\n current image classification : %s, possible : %.2f\n", labels.at(classidx).c_str(), classProb);// 显示文本putText(Showimages[n], labels.at(classidx), Point(10, 20), FONT_HERSHEY_SIMPLEX, 0.6, Scalar(0, 0, 255), 1, 1);imshow("Image Classification", Showimages[n]);waitKey(0);}return 0;
}相关文章:
ubuntu clion从0开始搭建一个风格转换ONNX推理网络 opencv cuda::dnn::net
系统搭建 系统搭建 OpenCV的安装 cmake sudo apt-get install cmake其他环境以来 sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff5.dev libswscale-dev libjasper-dev 不安装会报这个错误 OpenCV(4.6.0) /hom…...

1.十大排序算法
1.什么是排序算法? 在梳理十大排序算法之前,虽然知道排序算法是将数字或字母按增序排列的算法,但该理解过于片面,那排序算法的权威定义是什么呢。 一个排序算法(英语:Sorting algorithm)是一种…...
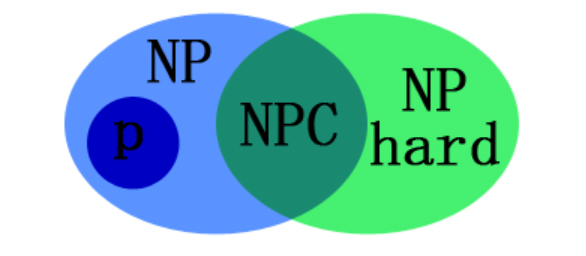
算法导论—SAT、NP、NPC、NP-Hard问题
算法导论—SAT、NP、NP-Hard、NPC问题SAT 问题基本定义问题复杂性P、NP、NP-Hard、NP-Complete(NPC)证明NP-Hard关系图NP问题的概念约化的定义NPC问题NP-Hard问题SAT 问题基本定义 SAT 问题 (Boolean satisfiability problem, 布尔可满足性问题,SAT): 给…...

linux入门---基础指令(上)
这里写目录标题前言ls指令pwd指令cd指令touch指令mkdirrmdirrmman指令cp指令mv指令前言 我们平时使用电脑主要是通过鼠标键盘以及操作系统中自带的图形来对电脑执行相应的命令,比如说我想打开D盘中的cctalk这个文件: 我就可以先用鼠标左键单击这个文件…...
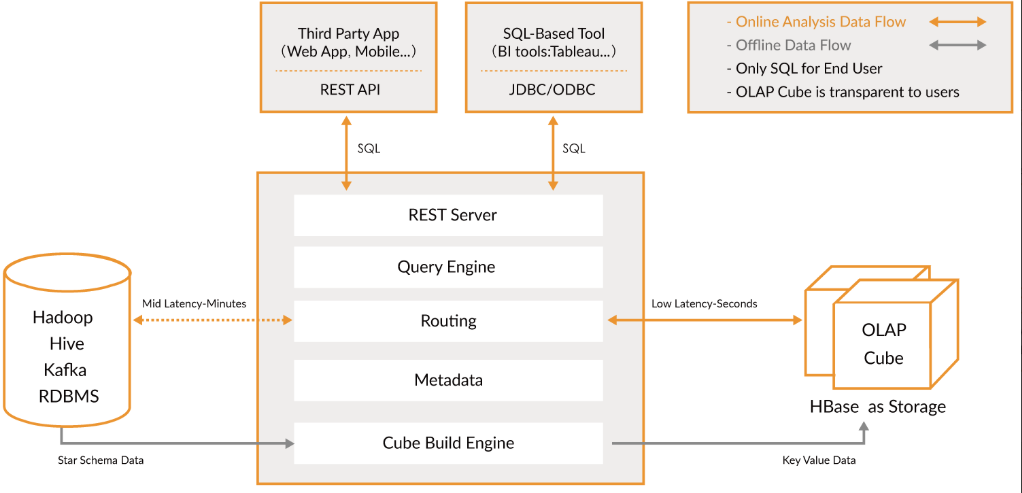
大数据Kylin(一):基础概念和Kylin简介
文章目录 基础概念和Kylin简介 一、OLTP与OLAP 1、OLTP 2、OLAP 3、OLTP与OLAP的关系 二、数据分析模型 1、星型模型 2、雪花模型 …...

推进行业生态发展完善,中国信通院第八批RPA评测工作正式启动
随着人工智能、云计算、大数据等新兴数字技术的高速发展,数字劳动力应用实践步伐加快,以数字生产力、数字创造力为基础的数字经济占比逐年上升。近年来,机器人流程自动化(Robotic Process Automation,RPA)成…...

DOM编程-获取下拉列表选中项的value
<!DOCTYPE html> <html> <head> <meta charset"utf-8"> <title>获取下拉列表选中项的value</title> </head> <body> <script type"text/javascript"> …...

认证服务-----技术点及亮点
大技术Nacos做注册中心把新建的微服务注册到Nacos上去两个步骤 在配置文件中配置应用名称、nacos的发现注册ip地址,端口号在启动类上用EnableDiscoveryClient注解开启注册功能使用Redis存验证码信息加入依赖配置地址和端口号即可直接注入StringRedisTemplate模板类用…...
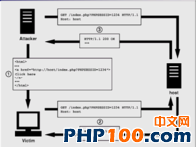
6个常见的 PHP 安全性攻击
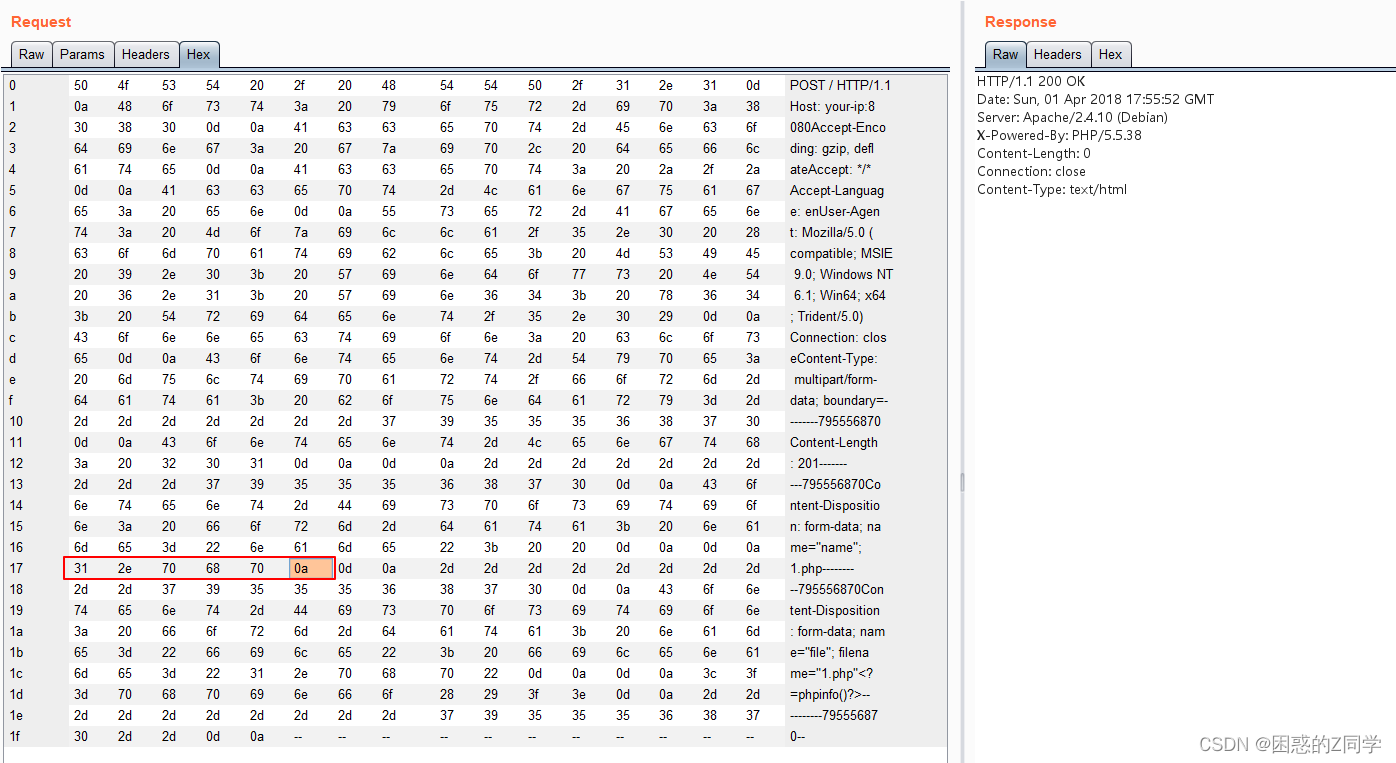
了解常见的PHP应用程序安全威胁,可以确保你的PHP应用程序不受攻击。因此,本文将列出 6个常见的 PHP 安全性攻击,欢迎大家来阅读和学习。 1、SQL注入 SQL注入是一种恶意攻击,用户利用在表单字段输入SQL语句的方式来影响正常的SQL执…...
三大基础排序算法——冒泡排序、选择排序、插入排序
目录前言一、排序简介二、冒泡排序三、选择排序四、插入排序五、对比References前言 在此之前,我们已经介绍了十大排序算法中的:归并排序、快速排序、堆排序(还不知道的小伙伴们可以参考我的 「数据结构与算法」 专栏)࿰…...
负载均衡上传webshell+apache换行解析漏洞
目录一、负载均衡反向代理下的webshell上传1、nginx负载均衡2、负载均衡下webshell上传的四大难点难点一:需要在每一台节点的相同位置上传相同内容的webshell难点二:无法预测下一次请求是哪一台机器去执行难点三:当我们需要上传一些工具时&am…...

【ESP 保姆级教程】玩转emqx数据集成篇③ ——消息重发布
忘记过去,超越自己 ❤️ 博客主页 单片机菜鸟哥,一个野生非专业硬件IOT爱好者 ❤️❤️ 本篇创建记录 2023-02-10 ❤️❤️ 本篇更新记录 2023-02-10 ❤️🎉 欢迎关注 🔎点赞 👍收藏 ⭐️留言📝🙏 此博客均由博主单独编写,不存在任何商业团队运营,如发现错误,请…...
支持分布式部署的主流方式 - Session 持久化到 Redis
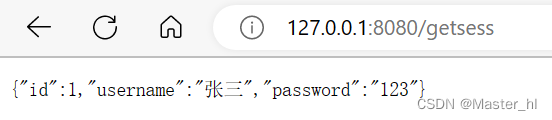
1.为什么要将 Session 存储在 Redis 中如果我们不将 Session 存储在 MySQL 或者 Redis 中, 那么做出来的项目就只能支持单机部署, 不支持分布式部署. 因为之前我们只是将 Session 存储在当前电脑的内存里面. 当张三去登录的时候, 将 Session 信息存储在 A 服务器, 这个时候负载…...
计算机网络|第二章 物理层|湖科大课程|从零开始的计网学习——物理层(计网入门就看这篇!)
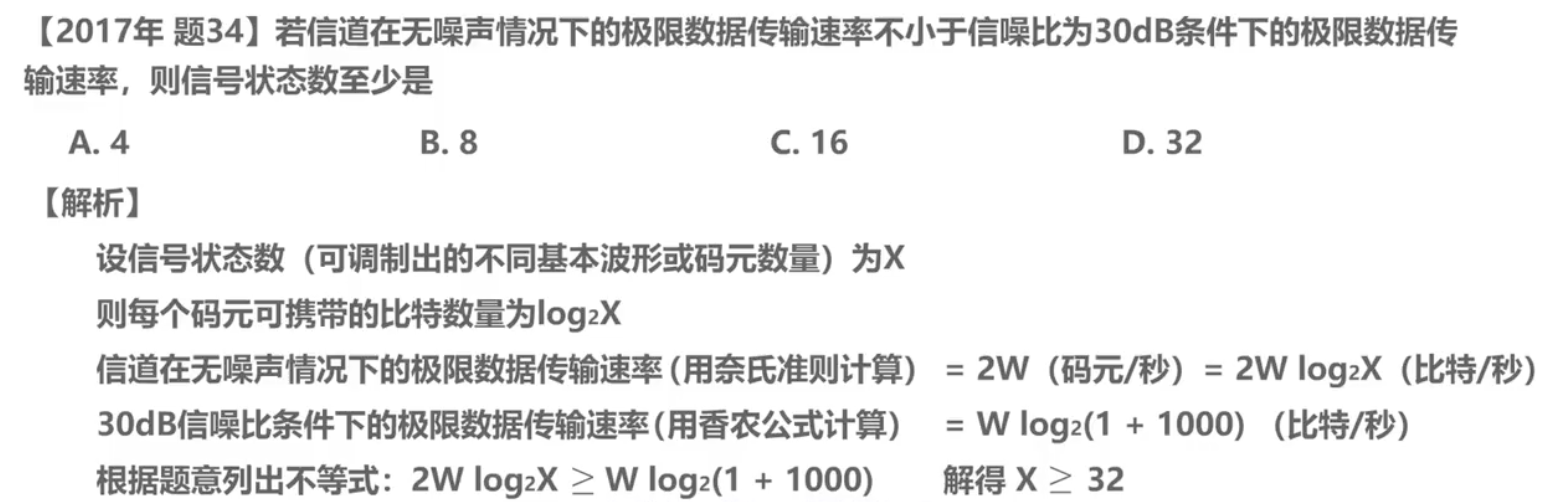
图片来源于胡科大计算机网络课程,https://www.bilibili.com/video/BV1c4411d7jb?p20&vd_sourcedeb12d86dce7e419744a73045bc66364。文章非盈利商业用途,供博主与大家学习参考,如有侵权,请联系我删除!2.1物理层的基…...
【微服务】RabbitMQSpringAMQP消息队列
🚩本文已收录至专栏:微服务探索之旅 👍希望您能有所收获 一.初识MQ (1) 引入 微服务间通讯有同步和异步两种方式: 同步通讯:就像打电话,可以立即得到响应,但是你却不能跟多个人同时通话。 异…...

jenkins +docker+python接口自动化之docker下安装jenkins(一)
jenkins dockerpython接口自动化之docker下安装jenkins(一) 目录:导读 1、下载jenkins 2、启动jenkins 3、访问jenkins 4.浏览器直接访问http://ip/:8080 5.然后粘贴到输入框中,之后新手入门中先安装默认的插件即可,完成后出…...
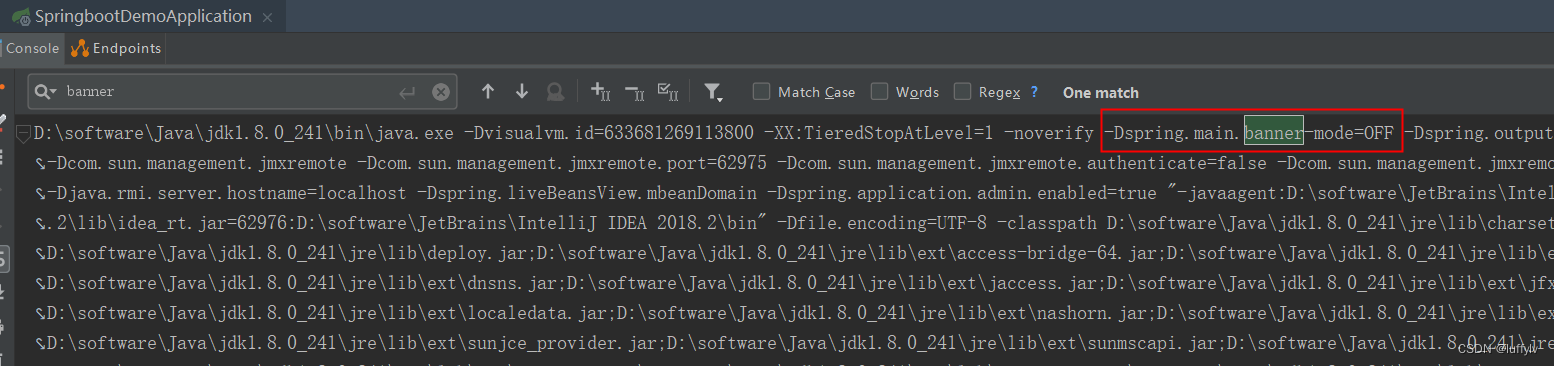
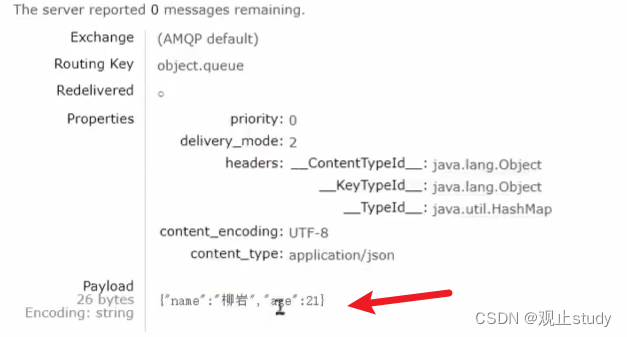
SpringBoot——Banner介绍
一、什么是BannerBanner即横幅标语,我们在启动SpringBoot项目时会将Banner信息打印至控制台。我们可以输出一些图形、SpringBoot版本信息等内容。默认情况下是通过实现类SpringBootBanner输出的Banner内容,默认的输出内容如下。二、自定义Banner如果不想…...
【STL】综述
STL,一文即可知 文章目录一、STL基本知识概述容器二、序列式容器详述数组容器array向量容器vector双端队列容器deque链式容器list正向链容器forward_list二、关联式容器详述红黑树RB-Tree哈希表参考博客😊点此到文末惊喜↩︎ 一、STL基本知识 概述 STL…...

C++中编译的静态库与动态库
1.什么是库库是写好的现有的,成熟的,可以复用的代码。现实中每个程序都要依赖很多基础的底层库,不可能每个人的代码都从零开始,因此库的存在意义非同寻常。本质上来说库是一种可执行代码的二进制形式,可以被操作系统载…...

JS对象到原始值的转换
JS对象到原始值转换的复杂性 主要由于某些对象类型存在不止一种原始值的表示 对象到原始值转换的三种基本算法 在解释三种算法前需要了解toString valueOf这两个方法 toString 返回对象的字符串表示Array类的toString方法会将每个元素转换为字符串,再使用逗号作为…...

AXI4协议实战:从零构建一个支持突发传输的从机接口
1. AXI4协议基础与从机接口设计概述 AXI4协议作为AMBA总线家族中最核心的成员,已经成为现代SoC设计中事实上的标准互联规范。我第一次接触AXI4是在2015年设计图像处理芯片时,当时为了连接DMA控制器和DDR控制器,不得不硬着头皮研究这个看似复杂…...

【限时解密】SITS大会未公开议程泄露:下一代缓存协议Cache-LLMv2将于Q3强制接入HuggingFace生态?
更多请点击: https://intelliparadigm.com 第一章:大模型缓存策略优化:SITS大会 在2024年SITS(Scalable Intelligence & Trustworthy Systems)大会上,大模型推理缓存成为性能优化的核心议题。与传统We…...

AI助手自我进化框架:异步复盘与技能固化工程实践
1. 项目概述:一个让AI助手学会自我进化的“内功心法”如果你用过Claude、ChatGPT或者国内的一些大模型,肯定有过这样的体验:你跟它聊得挺好,让它帮你写个代码、分析个文档,它都能干。但聊着聊着,你发现它好…...

PIDtoolbox完全指南:3步掌握无人机黑盒日志分析的终极免费工具
PIDtoolbox完全指南:3步掌握无人机黑盒日志分析的终极免费工具 【免费下载链接】PIDtoolbox PIDtoolbox is a set of graphical tools for analyzing blackbox log data 项目地址: https://gitcode.com/gh_mirrors/pi/PIDtoolbox 你是否曾面对无人机的飞行日…...

观察使用TokenPlan套餐后月度API成本的变化趋势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察使用TokenPlan套餐后月度API成本的变化趋势 对于依赖大模型API进行开发的中小型团队而言,每月产生的API调用成本是…...

终极指南:如何用NPYViewer快速可视化NumPy数组数据
终极指南:如何用NPYViewer快速可视化NumPy数组数据 【免费下载链接】NPYViewer Load and view .npy files containing 2D and 1D NumPy arrays. 项目地址: https://gitcode.com/gh_mirrors/np/NPYViewer 还在为NumPy数组数据可视化而烦恼吗?面对二…...

如何通过Elden Ring FPS Unlock And More解锁《艾尔登法环》全部性能:新手完整指南
如何通过Elden Ring FPS Unlock And More解锁《艾尔登法环》全部性能:新手完整指南 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gi…...

终极指南:3步解决Mac NTFS读写难题,Nigate免费工具完整教程
终极指南:3步解决Mac NTFS读写难题,Nigate免费工具完整教程 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, a…...
)
在RK3399上跑通ORB-SLAM2和VINS-MONO,我踩过的那些坑(含RealSense D435i兼容性测试)
在RK3399上部署ORB-SLAM2与VINS-MONO的避坑实战指南 引言 当视觉SLAM算法遇上嵌入式平台,总会碰撞出意想不到的火花。作为一名长期在边缘计算设备上折腾SLAM算法的开发者,我最近在RK3399这块性能强劲的ARM开发板上部署ORB-SLAM2和VINS-MONO时,…...

在Node.js后端服务中集成Taotoken调用多模型API
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js后端服务中集成Taotoken调用多模型API 将大模型能力集成到后端服务是现代应用开发的常见需求。通过Taotoken平台…...