5. 服务发现
当主机较少时,在抓取配置中手动列出它们的IP地址和端口是常见的做法,但不适用于较大规模的集群。尤其不适用使用容器和基于云的实例的动态集群,这些实例经常会变化、创建或销毁的情况。
Prometheus通过使用服务发现解决了这个问题:通过自动化的机制来检测、分类和识别新的和变更的目标。服务发现可以通过以下几种机制实现:
- 从配置管理工具生成的文件中接收目标列表。
- 查询API(例如AWS API)以获取目标列表
- 使用DNS记录以便返回目标列表
5.1 静态配置的局限性
在了解服务发现的工作原理前,先回顾下数据抓取的生命周期。如下图所示,当Prometheus 开始作业时,第一步就是服务发现,这将生成作业将要抓取的目标和元数据标签列表。

在现有的配置中,服务发现机制是在static_configs块中定义的。
scrape_configs:config.- job_name: "prometheus"static_configs:- targets: ["localhost:9090"]- job_name: "node"static_configs:- targets: ["localhost:9600"]- job_name: "docker"static_configs:- targets: ["localhost:8080"]
从上可以看出,目标列表和关联标签都是采用手动服务发现的方式。可以看到在繁杂的工作中维护一长串主机列表并不是一个可扩展的任务。特别是对于大多数动态的集群环境,监控这些大集群的中的主机、应用程序和服务的规模,静态配置及其不方便。
选择成熟的服务发现机制显得尤为重要,常见的服务发现机制有:
- 基于文件的方式
- 基于云的方式
- 基于DNS的方式
5.2 基于文件进行服务发现
相比静态配置进行服务发现而言,基于文件的发现会更先进些。借助基于文件的服务发现,Prometheus 会使用文件中指定的目标。这些文件通常由另一系统生成,例如Puppet、Ansible或Chef等配置管理系统,或者从其他源(如CMDB)查询。定期执行脚本或进行查询可以(重新)生成这些文件。Prometheus 会按指定的时间计划从这些文件重新加载目标。
这些文件可以是YAML或JSON格式,包含定义的目标列表,就像我们在静态配置中定义它们一样。让我们从将现有作业迁移到基于文件的服务发现开始。
scrape_configs:- job_name: "prometheus"file_sd_configs:- files:- targets/prometheus/*.jsonrefresh_interval: 5m- job_name: "node"file_sd_configs:- files:- targets/node/*.jsonrefresh_interval: 5m- job_name: "docker"file_sd_configs:- files:- targets/docker/*.jsonrefresh_interval: 5m
我们用file_sd_configs块替换prometheus.yml文件中的 static_configs块。在这些块中,已经指定了文件列表,并包含在files列表中。我们在父目录targets下为每个作业指定对应的文件,并为每个作业创建一个子目录。你可以创建适合你的任何文件结构。
然后使用*.json的glob样式来指定文件。每当这些文件发生更改时,系统都将从此目录中所有以.json结尾的文件加载目标。我们选择JSON格式,因此它是一种方便使用各种语言和集成来编写的流行格式。
每次作业运行或这些文件发生变化时,Prometheus都会重新加载文件的内容。以防万一,我们还指定了refresh_interval选项,该选项将在每个间隔结束加载文件列表中的目标——对这个示例来说是5分钟。
让我们快速创建上述的目录结构。
sudo mkdir targets
sudo mkdir targets/{prometheus,node,docker}

将prometheus、节点和Docker守护进程列表移动到新的JSON文件,创建三个文件类保存这些目标。
sudo touch targets/prometheus/prometheus.json
sudo touch targets/node/node.json
sudo touch targets/docker/daemons.json
填充json文件,当然也可以使用yaml进行文件配置。
prometheus.json如下:
[{"targets": ["localhost:9090"]
}]node.json如下:
[{"targets": ["localhost:9600"]
}]daemons.json如下:
[{"targets": ["localhost:8080"],"labels": {"datacenter": "nj"}
}]在这里,我们向Docker守护进程目标添加了值为nj的标签datacenter。基于文件的服务发现会在重新标记阶段自动给每个目标添加一个元数据标签_meta_filepath,它包含配置目标的文件路径和文件名。
编写文件
由于编写的JSON文件已经非常明确地定义了抓取目标的来源,当然可以使用能集中配置存储或配置管理数据库(CMDB)或者PuppetDB会更方便。
自定义编写脚本是,需要遵守以下几条简单的规则:
- 服务发现可配置——不要采用硬编码的方式。最好确保你的文件发现能够使用默认配置自动运行。如确保默认配置选项采用目标来源的默认安装状态。
- 不要在配置中暴露API或者秘钥、密码等信息,应该是依靠秘钥来保管库或环境变量。
- 针对输出目标的文件的操作应该是原子的。
PS: 在Prometheus文档中还有一个基于文档的服务发现集成列表。
服务启动
/usr/local/prometheus/prometheus --config.file="/usr/local/prometheus/prometheus.yml" &启动后Prometheus结果如下:
5.3 基于API的服务发现
原生的服务发现集成在某些工具和平台上提供,它们内置支持Prometheus。这些服务发现插件使用工具和平台现有的数据存储或API来返回目标列表。
当前可用的本机服务发现插件包罗以下平台:
- Azure
- Amazon EC2
- Consual
- Google Compute Cloud
- Kuberneteszhe
Amazon EC2服务发现插件使用Amazon Web Service EC2 API来获取EC2实例列表,以用作 Prometheus目标。要是用该服务发现插件,需要拥有AWS账号,这里就不操作了。
5.4 基于DNS服务发现
当你不想选择基于文件的服务发现和基于API的服务发现,那么你可以选择基于DNS的服务发现。
这里不多做介绍,如果有兴趣可以在评论取留言。
相关文章:
5. 服务发现
当主机较少时,在抓取配置中手动列出它们的IP地址和端口是常见的做法,但不适用于较大规模的集群。尤其不适用使用容器和基于云的实例的动态集群,这些实例经常会变化、创建或销毁的情况。 Prometheus通过使用服务发现解决了这个问题࿱…...

算法备案背后的原因:确保技术透明度与公正
随着现代技术的发展,算法逐渐渗透到我们日常生活的各个方面,从金融决策到个性化的商品推荐,再到医疗诊断和司法系统。然而,这种无所不在的应用也带来了一系列的社会和伦理问题,尤其是在算法的透明度和公正性上。这正是…...
Linux centos 常用命令 【持续更新】
一、查看文件信息 indoe和目录项 # df命令查看每个硬盘分区的inode总数和已经使用的数量 df -i# 查看inode的大学 xfs_growfs /dev/sda1|grep "isize"# 查看文件的indoe号码 ls -istat查看文件信息 # 文件的详细信息 stat anaconda-ks.cfg # -t参数是在一行内输出…...

《使用 VMware 在 Windows 上搭建 Linux 系统的完整指南》
《使用 VMware 在 Windows 上搭建 Linux 系统的完整指南》 1、准备工作1.1 安装 VMware 软件1.2 下载 Linux 发行版镜像文件1.3 安装SSH工具 2、创建新的虚拟机2.1 VMware页面2.2 打开VMware页面并点击创建新的虚拟机,选择自定义2.3 选择系统兼容性,默认…...

大数据Flink(六十):Flink 数据流和分层 API介绍
文章目录 Flink 数据流和分层 API介绍 一、Flink 数据流...

软件测试面试题——如何测试App性能?
为什么要做App性能测试? 如果APP总是出现卡顿或网络延迟的情况,降低了用户的好感,用户可能会抛弃该App,换同类型的其他应用。如果APP的性能较好,用户体验高,使用起来丝滑顺畅,那该应用的用户粘…...

玩转C链表
链表是C语言编程中常用的数据结构,比如我们要建一个整数链表,一般可能这么定义: struct int_node {int val;struct int_node *next;}; 为了实现链表的插入、删除、遍历等功能,另外要再实现一系列函数,比如:…...

MySQL表的基础的增删改查
增(insert into) 插入所有列的数据 不写具体列名要确保字段都对应正确 -- 假设你有一个名为 "employees" 的表,有多个列 INSERT INTO employees VALUES (101, Alice, Manager, 50000);插入指定列的数据 -- 假设你有一个名为 "students" 的表&…...

数字化车间
一、数字化车间概述 数字化车间是以现代化信息、网络、数据库、自动识别等技术为基础,通过智能化、数字化、MES系统信息化等手段融合建设的数字化生产车间,精细地管理生产资源、生产设备和生产过程。随着工业4.0概念的提出,未来的工业和制造…...
基础堆排序
目录 基础堆排序 一、概念及其介绍 二、适用说明 三、过程图示 基础堆排序...

ISC 2023 | 赛宁网安验证评估 重磅发布
8月9日-10日,第十一届互联网安全大会(简称ISC 2023)在北京国家会议中心隆重举办。作为本次大会的战略合作伙伴(最高级别),赛宁网安主办 “安全验证评估论坛”,邀请邬江兴院士与业界专家共同…...
浅谈AI浪潮下的视频大数据发展趋势与应用
视频大数据的发展趋势是多样化和个性化的。随着科技的不断进步,人们对于视频内容的需求也在不断变化。从传统的电视节目到现在的短视频、直播、VR等多种形式,视频内容已经不再是单一的娱乐方式,更是涉及到教育、医疗、商业等各个领域。 为了满…...

github 无语的问题,Host does not existfatal: Could not read from remote repository.
Unable to open connection: Host does not existfatal: Could not read from remote repository. image.png image.png image.png Please make sure you have the correct access rights and the repository exists. 如果github desktop和git pull 和git clone全部都出问题了&…...
机器学习基础之《特征工程(4)—特征降维—案例》
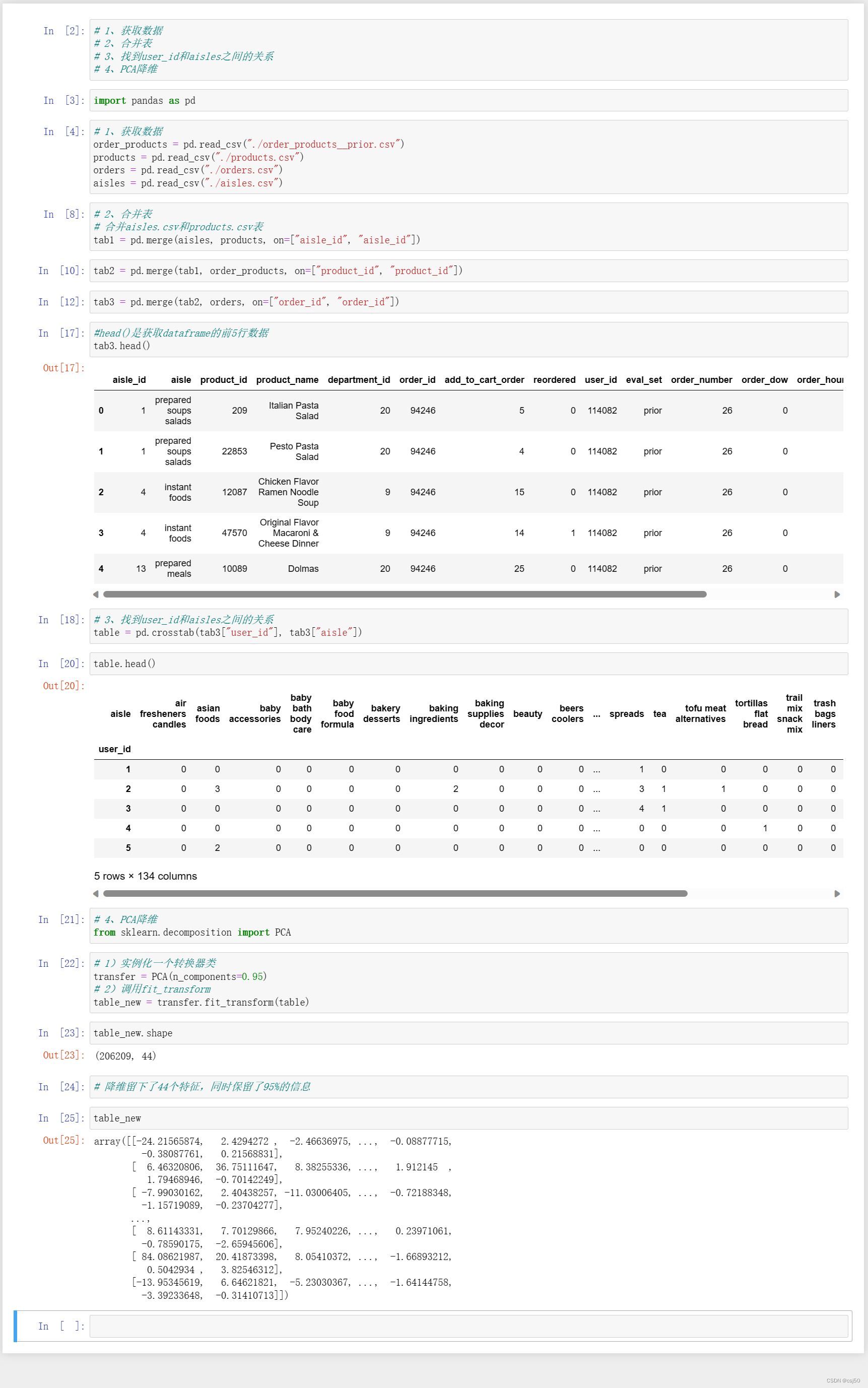
一、探究用户对物品类别的喜好细分 1、找到用户和物品类别的关系 数据如下: (1)order_products__prior.csv:订单与商品信息 字段:order_id,product_id,add_to_cart_order,reordered…...

docker 删除镜像文件
docker 容器里面太多镜像,D盘满了 四 查看和移除镜像 1 查看镜像 docker images 2 移除镜像命令 docker rmi 镜像名称 # 只输入前四位即可 五 实际有效操作 清除所有不使用的资源 docker system prune 这个命令将会删除所有不使用的镜像、容器和数据卷等资…...
ArcGIS Pro 基础安装与配置介绍
ArcGIS Pro ArcGIS Pro作为ESRI面向新时代的GIS产品,它在原有的ArcGIS平台上继承了传统桌面软件(ArcMap)的强大的数据管理、制图、空间分析等能力,还具有其独有的特色功能,例如二三维融合、大数据、矢量切片制作及发布…...

剑指 Offer 13. 机器人的运动范围
地上有一个m行n列的方格,从坐标 [0,0] 到坐标 [m-1,n-1] 。一个机器人从坐标 [0, 0] 的格子开始移动,它每次可以向左、右、上、下移动一格(不能移动到方格外),也不能进入行坐标和列坐标的数位之和大于k的格子。例如&am…...

技术应用:Docker安全性的最佳实验|聊聊工程化Docker
🔥 技术相关:《技术应用》 ⛺️ I Love you, like a fire! 文章目录 首先,使用Docker Hub控制访问其次,保护密钥写在最后 不可否认,能生存在互联网上的软件都是相互关联的,当我们开发一款应用程序时&#x…...
【Tomcat】Tomcat部署及优化
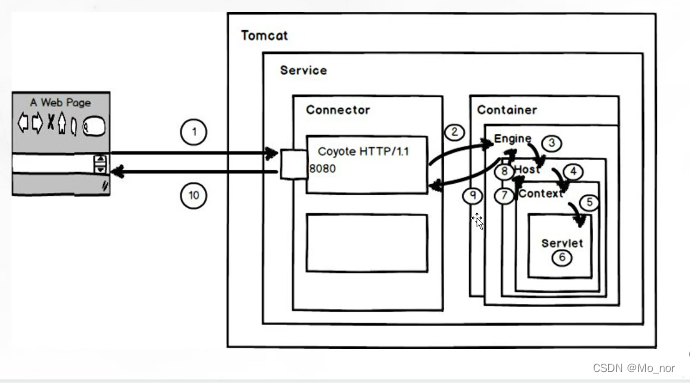
Tomcat 它是一个免费、开源的web应用服务器;基于java代码开发的软件;处理动态请求和基于Java代码的页面开发; 可以在html当中写入Java代码,Tomcat可以解析html页面当中的Java代码,执行动态请求以及动态页面 缺点&#…...

xAI与GPT-4:探索宇宙真实本质的AI之战
xAI与GPT-4:AI之战 写在前面第一部分第二部分推动科学研究提升人机交互引发伦理和社会问题 第三部分模型的进一步优化跨领域合作人机融合 最后总结 写在前面 人工智能(AI)领域的发展一直以来都备受关注,而近期马斯克宣布成立xAI&…...

NVSentinel:Kubernetes AI集群的智能健康管理方案
1. 项目概述:NVSentinel 如何为 Kubernetes AI 集群提供智能健康管理在当今AI驱动的生产环境中,Kubernetes已成为GPU工作负载的事实标准平台。然而,管理这些集群中的GPU节点绝非易事——从确保训练任务持续进展到维持服务流量稳定,…...

全网盘点5款强力降ai工具,2026年4月实测AI率降到4%!
一、前言:2026 年毕业必须通过aigc检测 2026年各高校对学术论文的AIGC疑似度的审查全面变严,均发布了具体AIGC检测报告和数值要求,211和985高校规定本科论文AI率要低于20%,硕士要求 AI 率不高于15%。普通高校一般要求AI率控制在 …...

PyTorch回归模型实战:加州房价预测教程
1. 从零构建PyTorch回归模型:加州房价预测实战在深度学习领域,PyTorch因其动态计算图和直观的API设计备受开发者青睐。今天我将分享如何用PyTorch构建一个完整的神经网络回归模型,以预测加州房价为例。这个案例特别适合刚接触PyTorch的开发者…...

如何快速诊断GPU内存故障:MemtestCL完整指南
如何快速诊断GPU内存故障:MemtestCL完整指南 【免费下载链接】memtestCL OpenCL memory tester for GPUs 项目地址: https://gitcode.com/gh_mirrors/me/memtestCL 还在为显卡频繁崩溃而烦恼吗?每次运行大型游戏或专业软件时,系统突然…...

2026年必逛!厦门地道特产店,品质保证让你爱不释手
在厦门这座充满历史与文化的城市里,寻找正宗的闽台特产不仅是游客的必修课,也是本地人生活的一部分。想要买到货真价实、品质上乘的特产,选对店铺至关重要。今天,就让我们一起探索几家被本地人私藏多年的地道特产好店,…...

CT1832 Real.Pi开发板:边缘AI与计算机视觉实战指南
1. CT1832 Real.Pi开发板深度解析Centron Design推出的CT1832 Real.Pi开发板,采用Realtek RTD1619B SoC,完美兼容树莓派3 Model B的外形尺寸。这块板子最吸引我的地方在于它专为边缘AI和计算机视觉应用优化,1.6 TOPS的NPU算力配合4K多媒体处理…...

桌面整理新选择:NoFences让你的Windows桌面告别杂乱无章
桌面整理新选择:NoFences让你的Windows桌面告别杂乱无章 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为满屏的图标和文件感到头疼吗?NoFences是…...

Claude Code 的结构性转变:Prompt 给出输出,系统带来一致性
最近 AI 编码圈子里最常见的画面是:开发者打开 Claude,敲出一段 Prompt,改改措辞,失败了就重试。偶尔出个能用的代码,大家就觉得“AI 真强”。我起初也以为 Claude Code 不过是个更聪明的聊天机器人,用好 P…...

从0到1:OpenLRC让AI字幕生成变得如此简单
从0到1:OpenLRC让AI字幕生成变得如此简单 【免费下载链接】openlrc Transcribe and translate voice into LRC file using Whisper and LLMs (GPT, Claude, et,al). 使用whisper和LLM(GPT,Claude等)来转录、翻译你的音频为字幕文件。 项目地址: https:…...

STC8H1K08低功耗设计避坑指南:除了掉电模式,你的Keil工程和下载设置做对了吗?
STC8H1K08低功耗设计实战:从代码优化到硬件配置的全方位避坑手册 当你的STC8H1K08项目需要长时间电池供电时,低功耗设计就成为了决定产品寿命的关键因素。很多工程师在实现掉电模式时都会遇到这样的困惑:明明按照手册写了代码,实测…...