基于PyTorch的图像识别
前言
图像识别是计算机视觉领域的一个重要方向,具有广泛的应用场景,如医学影像诊断、智能驾驶、安防监控等。在本项目中,我们将使用PyTorch来开发一个基于卷积神经网络的图像识别模型,用来识别图像中的物体。下面是要识别的四种物体。

一、项目内容
图像识别的过程一般可以分成以下几个步骤:建立一个包含图像和对应标签的数据集,将这些图像输入神经网络,对它们进行训练,得到模型文件,当输入不在训练集中的图像(新图像数据),对图像进行处理(包括图像灰度化、图像滤波去噪声、图像腐蚀、轮廓提取等操作),然后与模型文件进行匹配,最后得到预测结果。基本流程如图所示。
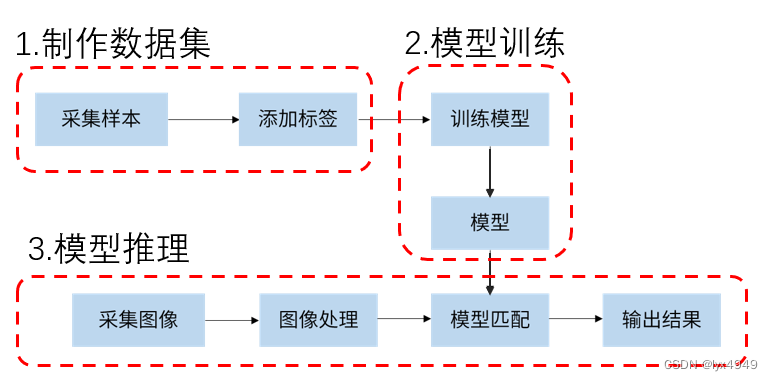
本项目分为三个主要部分:制作数据集(采集与预处理)、模型构建和训练、模型推理。
首先,我们将对数据进行预处理,包括图像数据集采集、图像增强、数据划分等操作。然后,我们将使用PyTorch中的卷积神经网络构建一个有效的图像识别模型,并使用训练数据对模型进行训练。最后,我们将使用训练好的模型对新的图像进行分类预测。
二、知识链接
(此部分是关于Pytorch如何实现图像识别的流程介绍,可以直接跳到下一步)
在 PyTorch 中,图像识别通常使用卷积神经网络(Convolutional Neural Network,简称 CNN)模型进行训练和推理。CNN 是一种专门用于处理图像数据的神经网络模型,它可以自动从原始图像中提取特征信息,并完成分类、检测、分割等任务。
在使用 PyTorch 进行图像识别时,通常需要进行以下步骤:
- 图像采集及数据预处理
收集到图像数据后,要将原始图像数据进行预处理,包括图像大小调整、灰度化、归一化等操作,以便于输入到神经网络中进行训练或推理。
- 定义模型(训练模型过程)
使用 PyTorch 提供的高级接口,定义一个卷积神经网络模型。模型通常由若干个卷积层、池化层、全连接层等组成,每个层都有多个参数需要进行训练。
- 定义损失函数(训练模型过程)
使用 PyTorch 提供的损失函数,定义一个用于衡量模型预测结果与真实标签之间差距的函数。常见的损失函数包括交叉熵损失、均方误差损失等。
- 定义优化器(训练模型过程)
使用 PyTorch 提供的优化器,定义一个用于更新模型参数的优化算法。常见的优化器包括随机梯度下降(SGD)、Adam 等。
- 训练模型(训练模型过程)
将预处理后的图像数据输入到模型中进行训练,使用定义的损失函数和优化器对模型参数进行优化,直到模型收敛或达到一定的训练轮数。
上述模型训练过程
- 模型推理
将预处理后的图像数据输入到已经训练好的模型中进行推理,得到模型对输入图像的预测结果。通常使用 softmax 函数将预测结果转换为概率分布,以便于进行分类。
本项目中将使用深度学习中的卷积神经网络模型 ResNet18 进行模型推理。大致的推理过程:在推理前,将输入的图像进行预处理,包括将图像变换为指定大小、转换为张量数据并进行归一化等操作。然后将预处理后的图像数据输入到 ResNet18 模型中进行推理。推理结果是一个概率向量,表示输入图像属于每个分类的概率,通过计算概率向量中的最大值,可以得到模型预测出的最佳分类标签。
三、项目准备
1.摄像头:能够拍摄到图像的工具,建议外界摄像头能够拍摄到物体的图片。
2.如果没有外接摄像头,可以自己手动采集相关的物体图片(例如鸟、鸭、猪、猫)
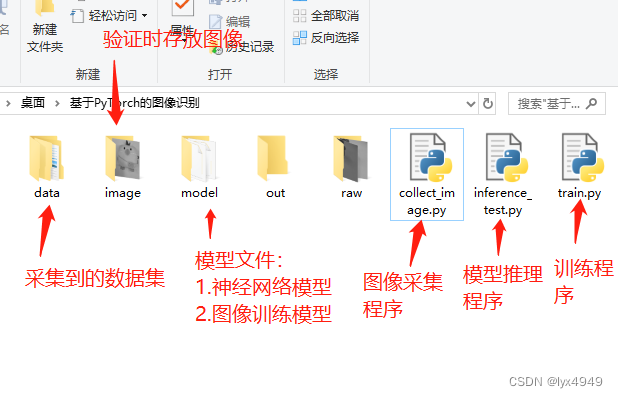
3.可以看最后我上传的附件程序
四、项目实施
任务一:数据集准备
收集数据集是实现图像分类的第一步,可从公共数据集或互联网上收集相关的图像数据,也可以自己拍摄或录制图像数据。其次,要对采集到的图像进行一系列的预处理,如缩放、旋转、裁剪等,以便后续模型训练的需要。
1.本程序分为2部分:①采集数据集 ②拍摄一张图像(等到训练好后使用)
① 采集数据集:使用外接摄像头拍摄物体的图片并生成4张曝光度不同的灰度图片存放到raw文件夹,然后把这4张图片分别旋转20次,每次18°
②拍摄一张图像此部分用于训练好模型之后使用
#collect_image.py程序
import cv2
import os
import numpy as np
#采集物体4张曝光度不同的图像,然后旋20次,每次18°
def Collect_Datasets():# 创建文件夹if not os.path.exists('raw'): #原始4张曝光度图片存放路径os.makedirs('raw')if not os.path.exists('out'): #旋转后生成图片的路径os.makedirs('out')image_name = input("请输入物体名称:") #给拍摄物体命名if not os.path.exists(image_name):os.makedirs(f'data/train/{image_name}') #把物体数据集存放到data/tarin文件夹
#采集物体4张曝光度不同的图像 # 调用摄像头拍摄1张图片cap = cv2.VideoCapture(1)ret, frame = cap.read()cap.release()# 灰度化gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 获取图像宽度和高度height, width = gray_frame.shape# 保存第一张灰度图片到raw文件夹cv2.imwrite('raw/exposure_1.jpg', gray_frame)# 生成其他3张曝光度不同的图片for i in range(3):exposure_adjusted = cv2.convertScaleAbs(gray_frame, alpha=(i+1)*0.65, beta=0)cv2.imwrite(f'raw/exposure_{i+2}.jpg', exposure_adjusted) #其他3张不同曝光度的图片也存放到raw文件夹#旋转图片for i in range(20):angle = i * 18 # 每次旋转18°for j in range(4):image_path = f'raw/exposure_{j+1}.jpg' #给旋转的图片命名img = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE) #读取raw文件夹内图片#cv2.getRotationMatrix2D()函数用于获取图像旋转的变换矩阵#获取一个变换矩阵 M,该矩阵可以将图像围绕 (width/2, height/2) 旋转 angle 度M = cv2.getRotationMatrix2D((width/2, height/2), angle, 1)rotated = cv2.warpAffine(img, M, (width, height)) #对图像进行旋转操作out_path = f'data/train/{image_name}/{image_name}_{i*4+j+1}.jpg' #图片存放路径,存放到以你为物体命的名的文件夹cv2.imwrite(out_path, rotated)
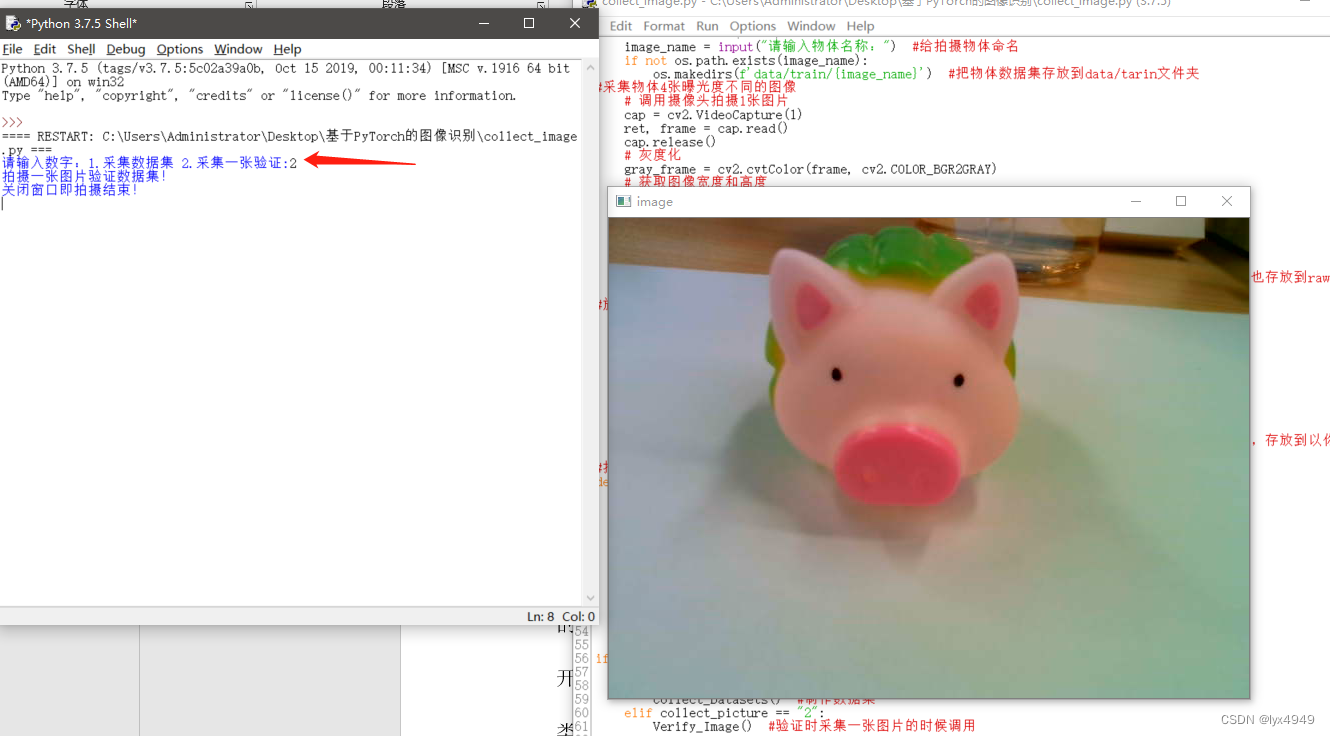
#拍摄一张需要验证的物体图像,用于训练完验证时候使用
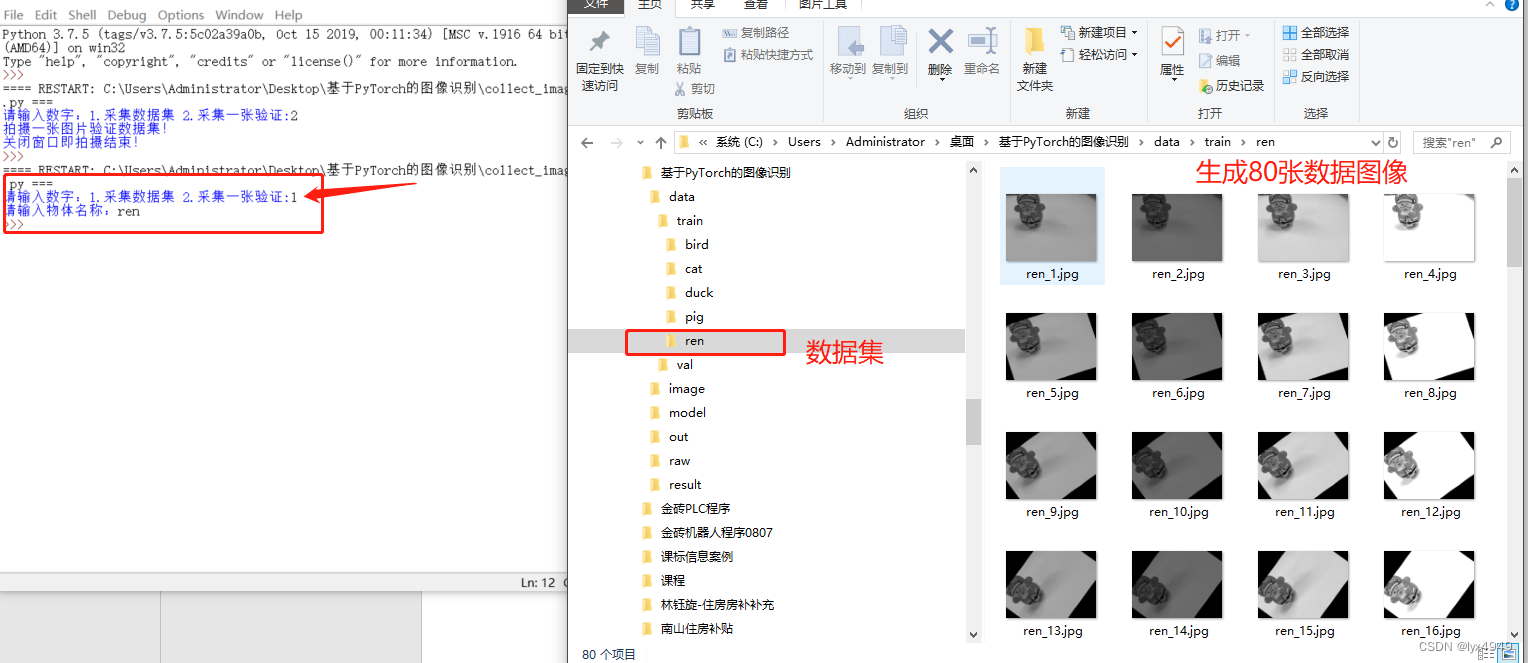
def Verify_Image():print("拍摄一张图片验证数据集!")cap = cv2.VideoCapture(1)ret, frame = cap.read()cv2.imshow("image", frame)print("关闭窗口即拍摄结束!")cv2.waitKey()# 等待按键触发cap.release()# 灰度化gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 保存灰度图片cv2.imwrite('image/image.jpg', gray_frame)if __name__ == "__main__":collect_picture = input("请输入数字:1.采集数据集 2.采集一张验证:")if collect_picture == "1":Collect_Datasets() #制作数据集elif collect_picture == "2":Verify_Image() #验证时采集一张图片的时候调用运行效果:假设我这里需要增加一个物体的数据集,执行程序后,输入“1”,执行过程有提示,执行完成后,会生成对应物体的文件夹,里面会有生成的80张数据集,是4张不同曝光度图片,分别旋转20次后得到的。
任务二:模型训练
在制作好数据集后,需要使用深度学习算法进行模型训练,本项目使用PyTorch框架来训练图像分类模型,包括数据预处理、模型定义、模型训练、模型保存等过程。
为了能够更快的得到模型,我们使用一个预训练好的ResNet-18网络模型来进行图像分类、目标检测等任务,而不需要从头开始训练模型,从而节省训练时间和计算资源。resnet18.pth已放置在model文件夹中。
关于程序的解释,看代码注释。其中通用训练模型函数train_model(),用于训练和验证一个给定的深度学习模型。该函数接受一个模型(model)、一个损失函数(criterion)、一个优化器(optimizer)和一个学习率调度器(scheduler),以及一个可选的训练的轮数(num_epochs,默认参数25),在给定的训练数据集和验证数据集上训练模型,并返回训练好的模型
#train.py程序
import os
import time
import torch
import torchvision
from torchvision import datasets, models, transforms
import matplotlib.pyplot as plt
import numpy as np
import copy
import glob
import shutil
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler# 数据集存放路径
path = './data/'# 遍历数据集
#将训练集数据中的数据随机抽取作为验证集数据,并将验证集数据复制到新建的文件夹中,以便于后续的模型训练和评估
for folder in os.listdir('./data/train'):# 图片格式为.jpg或.pngjpg_files = glob.glob(os.path.join(path,"train", folder, "*.jpg"))png_files = glob.glob(os.path.join(path,"train", folder, "*.png"))files = jpg_files + png_files# 统计训练集数据num_of_img = len(files)print("Total number of {} image is {}".format(folder, num_of_img))# 从训练集里面抽取100%作为验证集,将训练集中的所有数据进行随机打乱,并计算出需要抽取的数据数量shuffle = np.random.permutation(num_of_img)percent = int(num_of_img * 1)print("Select {} img as valid image".format(percent) )# 新建val文件夹存放验证集数据path_val = os.path.join(path,"val",folder)if not os.path.exists(path_val):os.makedirs(path_val)# 把训练集里面抽取100%的数据复制到val文件夹# shuffle()方法将序列的所有元素随机排序for i in shuffle[:percent]:print("copy file {} ing".format(files[i].split('\\')[-1]))shutil.copy(files[i], path_val)# 数据增强与变换
'''
定义一个数据增强与变换的函数data_transforms,包括训练集和验证集两部分。
使用transforms.Compose()方法将多个图像变换组合起来,以增强训练集的多样性和鲁棒性。
在训练深度神经网络时,数据增强是提高模型性能和泛化能力的重要手段之一。
通过多个随机变换组合起来,可以使训练集数据更加丰富多样,从而降低模型的过拟合风险
'''
data_transforms = {# 训练集'train':transforms.Compose([transforms.Resize((224,224)), #调整输入图像的大小,以适应模型的输入尺寸transforms.Grayscale(3), #将输入图像转换为三通道的灰度图像,以便于在RGB模型上进行训练transforms.RandomRotation(5), #对输入图像随机进行旋转transforms.RandomVerticalFlip(0.5), #对输入图像进行垂直翻转,增加模型对镜像变换的鲁棒性transforms.RandomHorizontalFlip(0.5), #对输入图像进行水平翻转,增加模型对镜像变换的鲁棒性transforms.ToTensor(), #将输入图像转换为PyTorch张量transforms.Normalize([0.5,0.5,0.5], [0.5,0.5,0.5]) #对输入图像进行标准化处理 ]),# 测试集,同上'val':transforms.Compose([transforms.Resize((224,224)),transforms.Grayscale(3),transforms.RandomRotation(5),transforms.RandomVerticalFlip(0.5),transforms.RandomHorizontalFlip(0.5),transforms.ToTensor(), transforms.Normalize([0.5,0.5,0.5], [0.5,0.5,0.5]) ])
}# 加载数据
data_dir = './data/'
# 使用datasets.ImageFolder()方法加载数据集,并对训练集和验证集分别进行数据增强和变换操作
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x), data_transforms[x]) for x in ['train','val'] }
print(image_datasets)
# 使用torch.utils.data.DataLoader()方法构建训练集和验证集的数据迭代器
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x], batch_size=len(os.listdir('./data/train')), #batch_size参数表示每个批次的样本数量shuffle=True, #shuffle参数表示是否对数据进行打乱num_workers=0) for x in ['train', 'val'] } #num_workers参数表示数据加载的并行数
print(dataloaders)
# 统计训练集和验证集的数据集大小
dataset_sizes = {x:len(image_datasets[x]) for x in ['train', 'val']}
print(dataset_sizes)
# 获取数据集的类别信息
class_names = image_datasets['train'].classes
print(class_names)# 判断GPU是否可用,如果当前计算机支持GPU,则使用GPU作为计算设备;否则使用CPU作为计算设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)# 通用训练模型函数,参数说明:模型、损失函数、优化器、学习率调度器、可选的训练轮数
'''
该函数首先对模型进行深拷贝,以备后续使用。然后,对于给定的训练轮数,它循环进行训练和验证阶段。在每个阶段中,
该函数设置模型的工作模式(训练模式或评估模式)并迭代输入数据进行训练或验证。在训练阶段,
该函数使用给定的优化器和损失函数计算模型参数的梯度,并更新模型的参数。在验证阶段,
该函数仅计算模型的输出和指标,不进行参数更新。在每个阶段结束时,
该函数打印阶段的损失和准确率,并记录最佳模型的权重和准确率。最后返回训练好的模型,并加载最佳模型的权重
'''
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):since = time.time() # 返回当前时间的时间戳# deepcopy为深拷贝,即创建一个新的对象,完全复制原始对象及其所有子对象。# model.state_dict是PyTorch中的一个方法,返回一个字典对象,将模型的所有参数映射到它们的张量值best_model_wts = copy.deepcopy(model.state_dict())best_acc = 0.0# 显示当前的训练进度for epoch in range(num_epochs):print('Epoch {}/{}'.format(epoch, num_epochs - 1)) # 输出训练进度print('-' * 10)# 每个epoch都有一个训练和验证阶段for phase in ['train', 'val']:if phase == 'train':# PyTorch中用于更新优化器的学习率scheduler.step()model.train() # 设置模型的工作模式:训练模式,模型会更新参数else:model.eval() # 设置模型的工作模式:评估模式,模型不会更新参数running_loss = 0.0 # 用于记录当前epoch的累计损失running_corrects = 0 # 用于记录当前正确分类的数量# 迭代数据for inputs, labels in dataloaders[phase]:# GPU加速,inputs、labels用于将输入数据和标签数据移动到指定的设备上,例如CPU或GPUinputs = inputs.to(device)labels = labels.to(device)# 清空梯度,在每次优化前都需要进行此操作optimizer.zero_grad()# torch.set_grad_enabled在训练模式下启用梯度计算,而在评估模式下禁用梯度计算with torch.set_grad_enabled(phase == 'train'):outputs = model(inputs) _, preds = torch.max(outputs, 1) # 返回输入张量在指定维度上的最大值及其对应的索引loss = criterion(outputs, labels)# 后向 + 仅在训练阶段进行优化if phase == 'train':# 反向传播:根据模型的参数计算loss的梯度loss.backward()# 调用Optimizer的step函数使它所有参数更新optimizer.step()running_loss += loss.item() * inputs.size(0) # 获取损失值和输入数据的数量running_corrects += torch.sum(preds == labels.data) # 记录当前epoch中正确分类的数量# dataset_sizes[phase]:该变量用于获取数据集在当前阶段中的大小epoch_loss = running_loss / dataset_sizes[phase] #当前epoch的平均损失epoch_acc = running_corrects.double() / dataset_sizes[phase] # 当前epoch的准确率# 打印当前epoch的损失和准确率,以实时监控模型的训练状态print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc)) # 前阶段的名称、当前epoch的平均损失、当前epoch的准确率if phase == 'val' and epoch_acc > best_acc: #更新最佳模型参数best_acc = epoch_accbest_model_wts = copy.deepcopy(model.state_dict())print()time_elapsed = time.time() - since# 输出整个训练过程的时间print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))# 用于输出最佳验证准确率,best_acc是训练过程中被更新为模型在验证集上的最佳准确率print('Best val Acc: {:4f}'.format(best_acc))# 用于加载模型的状态字典,即将最佳模型的参数设置为给定的参数字典model.load_state_dict(best_model_wts)return model# 主程序入口使用ResNet-18模型对图像进行分类,并训练模型并保存模型参数。
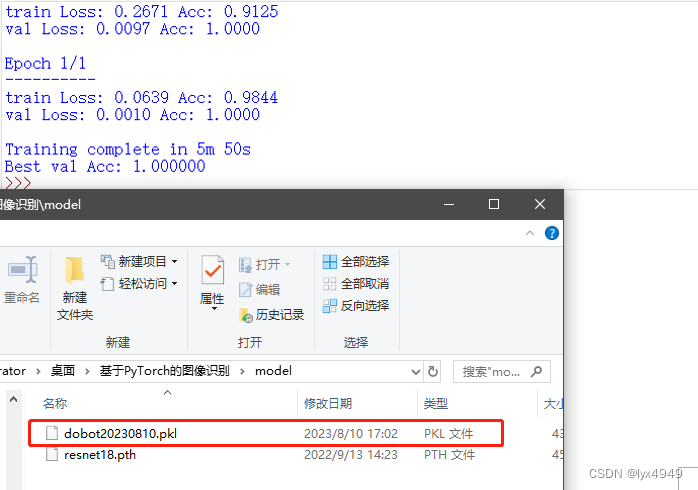
if __name__ == "__main__":# 用于初始化ResNet-18 模型model_ft = torchvision.models.resnet18(pretrained=False)# 加载resnet18网络参数model_ft.load_state_dict(torch.load('./model/resnet18.pth'))# 提取fc层中固定的参数num_ftrs = model_ft.fc.in_features# 重写全连接层的分类model_ft.fc = nn.Linear(num_ftrs, len(os.listdir('./data/train')))model_ft = model_ft.to(device)# 这里使用分类交叉熵Cross-Entropy作为损失函数,动量SGD作为优化器criterion = nn.CrossEntropyLoss()# 初始化优化器optimizer_ft = optim.SGD(model_ft.parameters(), lr=0.001, momentum=0.9)# 每7个epochs衰减LR通过设置gamma = 0.1exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)#调用通用训练模型的函数,返回训练得到的最佳模型'''下面调用了定义好的模型的训练函数。最后一个参数num_epochs用于指定训练模型的轮数,训练模型的轮数是一个重要的参数,它决定了模型训练的时间和精度。训练轮数太短可能会导致模型欠拟合,训练轮数太长则可能会导致模型过拟合。因此,在选择训练轮数时需要进行适当的调整和优化,以得到最佳的模型性能。在这个例子中,由于数据集较小,所以训练轮数设置为 2 轮,在实际应用中,需要根据数据集的大小、复杂度和模型的性能等因素进行调整,以便得到更为准确和实用的模型。''' model_ft = train_model(model_ft, criterion, optimizer_ft, exp_lr_scheduler, num_epochs=2)# 保存模型torch.save(model_ft.state_dict(), './model/dobot20230810.pkl')运行结果:
程序运行后,输出了模型的详细信息,如图所示。其中 train Loss 表示训练集上的损失函数值,train Acc 表示训练集上的准确率,val Loss 表示验证集上的损失函数值,val Acc 表示验证集上的准确率。可以在运行窗口看到训练集上的准确率和验证集上的准确率都接近甚至达到了 100%,这表明模型在训练集和验证集上都表现非常好,没有出现过拟合的情况,可以用于实际的图像分类任务中。最后,该模型的训练时间为 5 分 50 秒
任务三:模型推理
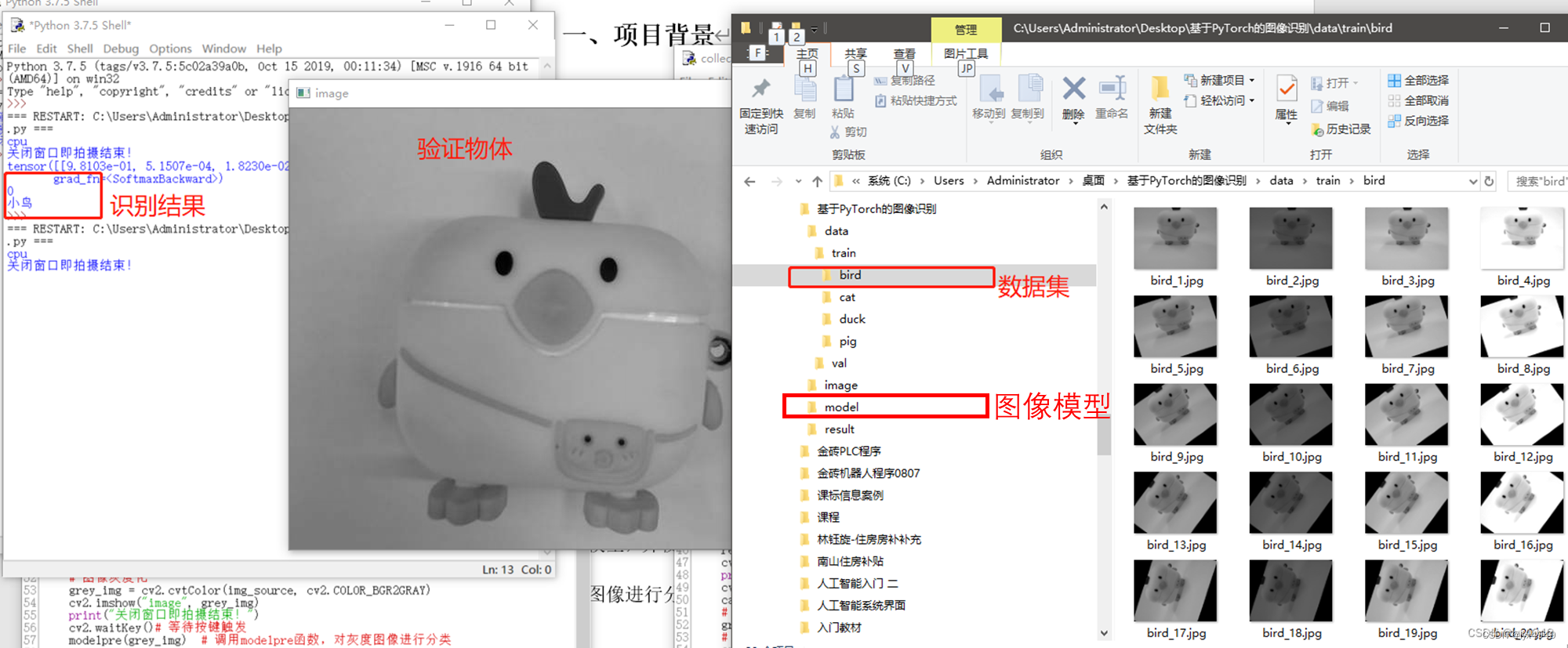
模型训练完成后,需要对新的图像进行分类。使用PyTorch框架,加载训练好的图像分类模型dobot20230810.pkl,可以对输入的灰度图像进行分类,判断其属于四个类别(‘小鸟’,‘小猫’,‘小鸭’,‘小猪’)中的哪一个。在推理之前,先通过原来的图像采集程序采集一张图片放到image文件夹内,并对图像灰度化,然后进行图像识别并输出识别结果,验证模型的准确性。
执行这个程序之前,需要先利用图像采集程序采集一张物体的图像存放在image文件夹内,使用任务一的代码,执行效果如下图。
模型推理程序
#inference_test.py程序
import cv2
from PIL import Image
import torch
import torchvision
from torchvision import datasets, models, transforms
import torch.nn.functional as F
import torch.nn as nntsfrm = transforms.Compose([transforms.Grayscale(3), # 将图像转换为灰度图像,通道数为3transforms.Resize((224, 224)), # 将图像变换为指定大小transforms.ToTensor(), # 将PIL图像转换为tensor数据transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5]) # 将PIL图像转换为tensor数据
])# 0.水果 1.蔬菜 2.服装 3.零食 (顺序需要按照训练集中的顺序)
classes = ('小鸟','小猫','小鸭','小猪')# 判断GPU是否可用,有cpu和cuda两种,这里的cuda就是gpu
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)# 模型推理
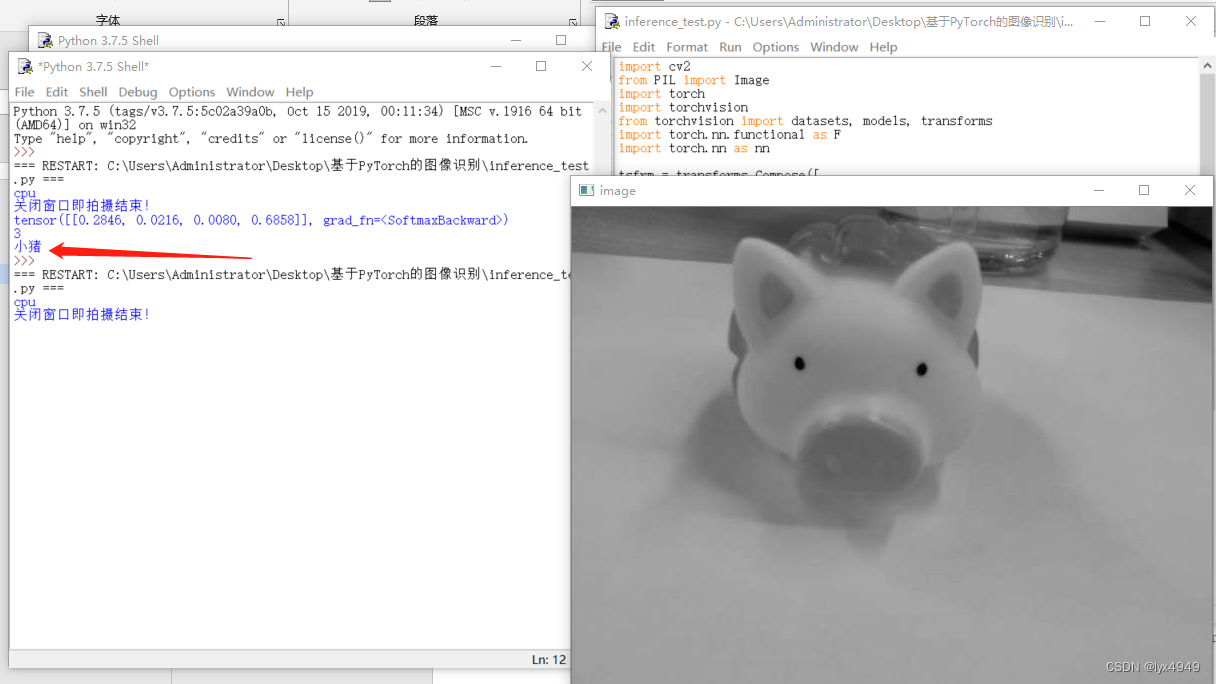
def modelpre(grey_img):model_eval = models.resnet18(pretrained=False) # 加载ResNet18模型num_ftrs = model_eval.fc.in_features # 获取默认的全连接层的输入维度model_eval.fc = nn.Linear(num_ftrs, 4) # 替换模型的全连接层,使其输出4个分类# 加载已经训练好的模型权重model_eval.load_state_dict(torch.load('./model/dobot20230810.pkl', map_location=device)) # 在推理前,务必调用model.eval()去设置dropout和batch normalization层为评估模式model_eval.eval()# 将OpenCV图像转换为PIL图像,并进行预处理image = Image.fromarray(cv2.cvtColor(grey_img, cv2.COLOR_GRAY2RGB))# PIL图像数据转换为tensor数据,并归一化img = tsfrm(image)# 图像增加1维[batch_size,通道,高,宽]img = img.unsqueeze(0)# 进行模型推理,得到分类结果output = model_eval(img)# 计算每个分类的概率 prob是4个分类的概率prob = F.softmax(output, dim=1)print(prob) # tensor([[0.0360, 0.0061, 0.9529, 0.0050]], grad_fn=<SoftmaxBackward>)# 找出最大概率的分类.torch.max() 函数会返回输入张量中最大值和最大值的索引value, predicted = torch.max(output.data, 1) # value模型预测出来的最大概率值label = predicted.numpy()[0] # 将Tensor转换为numpy数组print(label) # 打印出标签的索引pred_class = classes[predicted.item()] # 提取最佳分类的标签print(pred_class)if __name__ == "__main__": img_source = cv2.imread('image/image.jpg') # 图像灰度化grey_img = cv2.cvtColor(img_source, cv2.COLOR_BGR2GRAY)cv2.imshow("image", grey_img)print("关闭窗口即拍摄结束!")cv2.waitKey()# 等待按键触发modelpre(grey_img) # 调用modelpre函数,对灰度图像进行分类运行效果:
程序会去image文件夹内调用刚刚拍摄的验证图片去跟模型比对,最终输出4个概率。这4个概率就是我们拍摄的验证集与模型种4种类别的对比概率,最终程序会从中找到最大概率的那个类别输出对应的标签。
代码运行后,输出结果如图所示。print(device) 输出了 cpu,说明在这段代码中使用的是 CPU 来运行模型。输出结果3 是通过 torch.max() 函数得到的,它表示模型预测出来的最有可能的分类的索引。由于在 Python 中索引从0开始,因此3 表示模型预测出来的是第4个类别(索引为3),即 “猪” 这个类别
总结
程序附件链接:https://pan.baidu.com/s/1NYQ9E_WT0HVW0C32kelGyQ?pwd=lyx4
提取码:lyx4
相关文章:
基于PyTorch的图像识别
前言 图像识别是计算机视觉领域的一个重要方向,具有广泛的应用场景,如医学影像诊断、智能驾驶、安防监控等。在本项目中,我们将使用PyTorch来开发一个基于卷积神经网络的图像识别模型,用来识别图像中的物体。下面是要识别的四种物…...
js合并数组对象(将数组中具有相同属性对象合并到一起,组成一个新的数组)
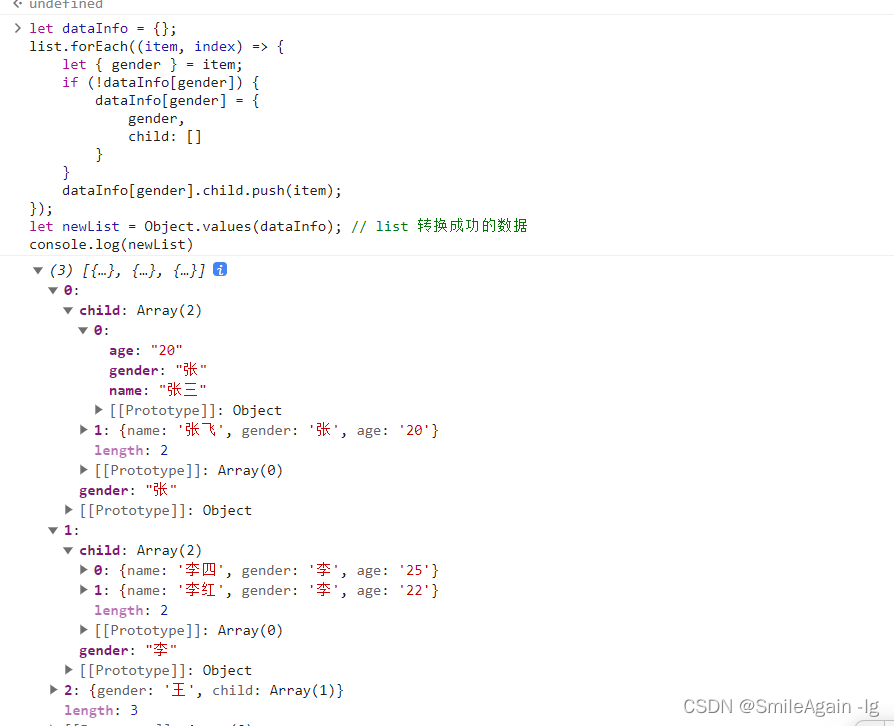
一、根据数组对象中某一key值,合并相同key值的字段,到同一个数组对象中,组成新的数组 1.原数组: var array [{ id: 1, name: Alice },{ id: 2, name: Bob },{ id: 1, age: 25 },{ id: 3, name: Charlie, age: 30 } ];2.合并后数…...

Spring BeanPostProcessor 接口的作用和使用
BeanPostProcessor 接口是 Spring 框架中的一个扩展接口,用于在 Spring 容器实例化、配置和初始化 bean 的过程中提供自定义的扩展点。通过实现这个接口,您可以在 bean 实例创建的不同生命周期阶段插入自己的逻辑,从而实现对 bean 行为的定制…...

Android 13 Hotseat定制化修改——006 hotseat图标禁止移动到Launcher中
目录 一.背景 二.方案 三.具体实践 一.背景 客户定制需要修改让hotseat中的icon不要移动到Launcher中,所以需要进行定制 二.方案 原生的Hotseat与Launcher是可以相互移动的,然后现在的需求是Hotseat中的图标只能在Hotseat中移动,所以需要做下限制 思路:在事件拦截的地…...
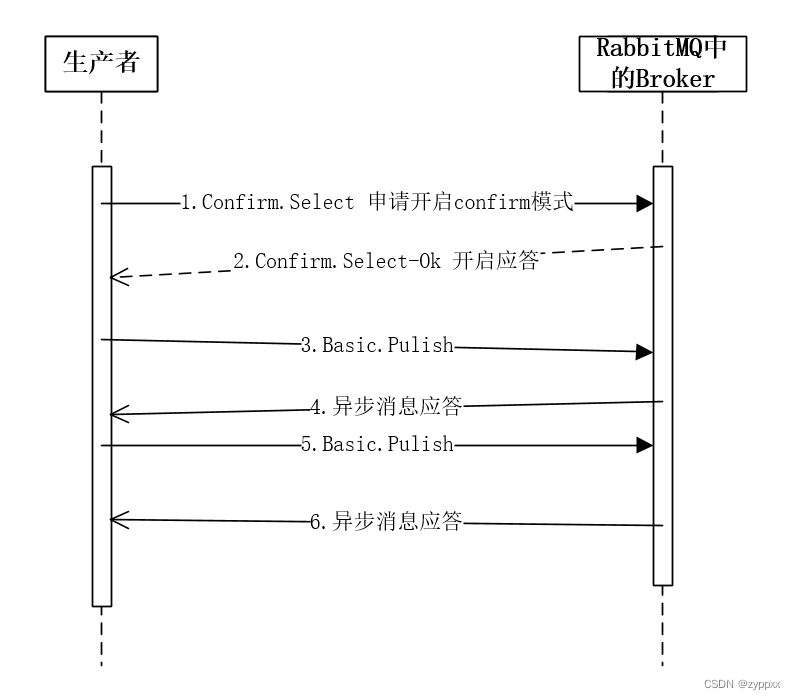
RabbitMQ 发布确认机制
发布确认模式是避免消息由生产者到RabbitMQ消息丢失的一种手段 发布确认模式 原理说明实现方式开启confirm(确认)模式阻塞确认异步确认 总结 原理说明 生产者通过调用channel.confirmSelect方法将信道设置为confirm模式,之后RabbitMQ会返回Co…...

微信小程序使用rich-text解析富文本字符串的时候,遇到image标签图片很大超过屏幕
场景: 使用uniapp开发微信小程序,解析富文本文章需求 用到的组件: u-view2.0的u-parse uniapp提供的rich-text 以上两种组件都是解析富文本的作用,一般用于富文本解析场景,比如解析文章内容,商品详情&am…...
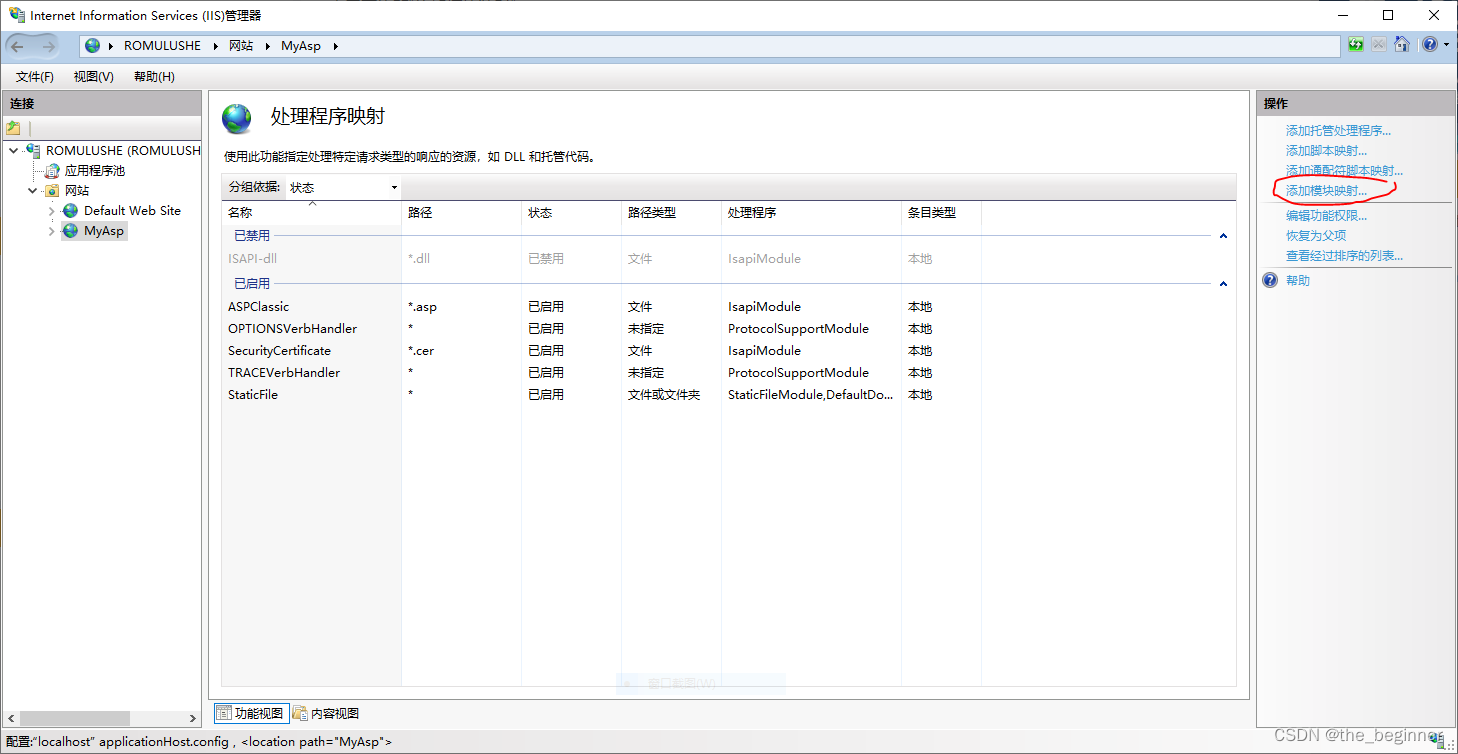
使用IIS服务器部署Flask python Web项目
参考文章 ""D:\Program Files (x86)\Python310\python310.exe"|"D:\Program Files (x86)\Python310\lib\site-packages\wfastcgi.py"" can now be used as a FastCGI script processor参考文章 请求路径填写*,模块选择FastCgiModule&…...

sentinel核心流程源码解析
sentinel的处理槽(ProcessorSlot) 可以说,sentinel实现的各种功能就是由各处理槽完成的 ,ProcessorSlot定义了四个方法: 当进入该处理槽时触发该方法 处理完 entry方法之后触发该方法 退出该处理槽时触发该方法 exit方法处理完成时触发该方法 sentinel的…...
中睿天下Coremail | 2023年第二季度企业邮箱安全态势观察
今日,中睿天下联合Coremail邮件安全发布《2023第二季度企业邮箱安全性研究报告》,对2023第二季度和2023上半年的企业邮箱的安全风险进行了分析。 一 垃圾邮件同比下降16.38% 根据监测,2023年Q2垃圾邮件数量达到6.47亿封,环比下降…...

桶排序-1184:明明的随机数
【题目描述】 明明想在学校中请一些同学一起做一项问卷调查,为了实验的客观性,他先用计算机生成了N个1到1000之间的随机整数(N≤100),对于其中重复的数字,只保留一个,把其余相同的数去掉&#x…...
)
Spring Boot中整合Keycloak OpenID Connect(OIDC)
在Spring Boot中整合Keycloak OpenID Connect(OIDC)是一个常见的任务,用于实现身份验证和授权。Keycloak是一个开源的身份和访问管理解决方案,而OpenID Connect是构建在OAuth 2.0之上的认证和授权协议。下面是一个简单的步骤指南&…...
如何使用Mac终端给树莓派pico构建C/C++程序进行开发,以及遇到各种问题该怎么处理,不使用任何IDE或编辑器(例如VS Code)
写本文的原因是官方的教程已经过时了,如果你现在按照官方教程来在 Mac 上进行配置,那么会遇到一堆问题,比如我几乎把能踩的“雷”都踩了。所以这里记录了完整过程,以及各种错误的原因和处理方法,不然以后换 Mac 了或者…...

linux 关机和重启
关机和重启 关机和重启之前最好先数据数据同步一下 # 将数据由内存同步到硬盘sync 关机 #shutdown [选项] 时间#立即进入维护模式shutdown now#立即重启shutdown -r now#20:00 重新启动计算机shutdown -r 20:00& #立即关机shutdown -h now# 20:00 关闭计算机shutdown -h 20…...

Python(八十三)字符串的比较操作
❤️ 专栏简介:本专栏记录了我个人从零开始学习Python编程的过程。在这个专栏中,我将分享我在学习Python的过程中的学习笔记、学习路线以及各个知识点。 ☀️ 专栏适用人群 :本专栏适用于希望学习Python编程的初学者和有一定编程基础的人。无…...

Java面试
Java面试宝典是一本面向Java开发者的面试准备指南,旨在帮助准备参加Java相关职位面试的人们更好地准备和应对面试。以下是一些可能在Java面试中涉及的主题和问题,供您参考: Java基础知识: 什么是Java虚拟机(JVM&#x…...

基于java的voliate关键字详解
voliate关键字的作用: 一、内存可见性 基于缓存一致性协议,当用voliate关键字修饰的变量改动时,cpu会通知其他线程,缓存已被修改,需要更新缓存。这样每个线程都能获取到最新的变量值。 二、基于内存屏障的防止指令重排 用voli…...

企业计算机服务器中了360后缀勒索病毒怎么办,勒索病毒解密数据恢复
随着计算机技术的不断发展,企业的办公系统得到了很大提升,但是随之而来的网络安全威胁也不断增加,勒索病毒的攻击事件时有发生。近期,我们收到某地连锁超市的求助,企业的计算机服务器遭到了360后缀勒索病毒攻击&#x…...
W6100-EVB-PICO 做TCP Server进行回环测试(六)
前言 上一章我们用W6100-EVB-PICO开发板做TCP 客户端连接服务器进行数据回环测试,那么本章将用开发板做TCP服务器来进行数据回环测试。 TCP是什么?什么是TCP Server?能干什么? TCP (Transmission Control Protocol) 是一种面向连…...

前端小兔鲜儿2
day10-小兔鲜儿 01-banner-轮播图 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1FWNmPpj-1691944251554)(assets/1680344354682.png)] index.css HTML结构 <!-- banner --><div class"banner"><div class"wrappe…...
Pycharm 双击启动失败?
事故 双击 Pycharm 后,出现加载工程,我不想加载这个工程,就点击了弹出的 cancle 取消按钮。然后再到桌面双击 Pycharm 却发现无法启动了。哪怕以管理员权限运行也没用,就是不出界面。 原因未知 CtrlshiftESC 打开后台ÿ…...

2026年跨平台B站资源管理终极指南:BiliTools哔哩哔哩工具箱
2026年跨平台B站资源管理终极指南:BiliTools哔哩哔哩工具箱 【免费下载链接】BiliTools A cross-platform bilibili toolbox. 跨平台哔哩哔哩工具箱,支持下载视频、番剧等等各类资源 项目地址: https://gitcode.com/GitHub_Trending/bilit/BiliTools …...

Win11Debloat:Windows 11终极系统优化与隐私保护指南
Win11Debloat:Windows 11终极系统优化与隐私保护指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and cus…...

终极光影增强指南:如何用Photon-GAMS将Minecraft变成电影级视觉盛宴
终极光影增强指南:如何用Photon-GAMS将Minecraft变成电影级视觉盛宴 【免费下载链接】Photon-GAMS Personal fork of Photon shaders 项目地址: https://gitcode.com/gh_mirrors/ph/Photon-GAMS 还在为Minecraft方块世界的单调画面感到乏味吗?想要…...
【含Matlab源码 15321期】)
【多智能体控制】领导者-跟随者的无人机群编队控制仿真(碰撞检测、轨迹规划)【含Matlab源码 15321期】
💥💥💥💥💥💥💥💥💞💞💞💞💞💞💞💞💞Matlab领域博客之家💞&…...

微生物组数据分析难题如何解决?curatedMetagenomicData实战指南深度解析
微生物组数据分析难题如何解决?curatedMetagenomicData实战指南深度解析 【免费下载链接】curatedMetagenomicData Curated Metagenomic Data of the Human Microbiome 项目地址: https://gitcode.com/gh_mirrors/cu/curatedMetagenomicData 在人类微生物组研…...

3分钟快速检测:Hotkey Detective帮你揪出Windows热键冲突元凶
3分钟快速检测:Hotkey Detective帮你揪出Windows热键冲突元凶 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你…...

Mermaid在线编辑器:5分钟学会专业图表制作的终极免费工具
Mermaid在线编辑器:5分钟学会专业图表制作的终极免费工具 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/mermaid-live-edi…...

Qwen3-Reranker-8B批处理优化:提升吞吐量的关键技术
Qwen3-Reranker-8B批处理优化:提升吞吐量的关键技术 1. 引言 如果你正在使用Qwen3-Reranker-8B处理大量文本重排序任务,可能会遇到这样的困扰:单个请求处理很快,但并发量一上来,系统就变得缓慢甚至崩溃。这不是模型本…...

视频创作者的福音:HunyuanVideo-Foley一键生成电影级音效实战教程
视频创作者的福音:HunyuanVideo-Foley一键生成电影级音效实战教程 1. 为什么你需要这个工具? 想象一下这样的场景:你刚刚完成了一段精美的视频剪辑,画面流畅、转场酷炫,但当你点击播放时——只有一片寂静。这就是大多…...

海康相机SDK采集的RGB和Mono8数据,如何正确喂给Qt和OpenCV做实时显示?
海康相机SDK与Qt/OpenCV实时图像处理全流程实战 工业相机在机器视觉领域扮演着关键角色,而海康威视的工业相机因其稳定性和高性价比被广泛应用。本文将深入探讨如何构建一个完整的实时图像处理流水线,从海康相机采集数据开始,到Qt界面实时显示…...