STM32 F103C8T6学习笔记5:定时器输出不同占空比PWM驱动舵机旋转角度
现在学习使用STM32 F103C8T6的定时器PWM模式,使用PWM驱动舵机转动不同角度,文章提供源码,测试工程,测试动态效果图。
目录
基础原理:
实验目标:
测试视频结果:
测试工程下载:
基础原理:
这次依旧拿出之前学习过的舵机DS3115,它的基础原理不多加介绍,在往期讲MSP432的文章有所提及:
MSP432自主开发笔记4:DS3115舵机的0~180全角度驱动_NULL指向我的博客-CSDN博客
这里直接作总结:
舵机,一般接有三根线,其中俩根是供电使用,还有一根是信号线
我们需要给信号线一个相应频率PWM的信号,让其知道有控制信号要到来,然后同时调整PWM的占空比即可调整其旋转角度
需要知道的大致有三个重要点:1、电压电流 2、PWM频率 3、识别占空比范围
1.PWM频率范围50~330Hz
2.脉宽范围是500~2500 us
3.精度是3us
4.旋转方向是顺时针
实验目标:
使用STM32 C8T6的定时器3输出PWM驱动舵机转动,从0~180度,缓慢转动一周后再次返回0度开始,以此循环。
下面的代码是我初始化TIM3的1~3这三个通道来输出PWM控制舵机,
总体流程如下:
1.定义初始化结构体
2.打开APB2等总线的时钟,开启A\B端口
3.配置PWM输出管脚
4.配置TIM定时器ARR,PSC等
5.配置PWM模式
void Timer3_PWM_init(u16 arr,u16 psc)
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;//开时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //PWM输出管脚配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化定时器(配置定时器TIM3频率)TIM_TimeBaseStructure.TIM_Period = arr; TIM_TimeBaseStructure.TIM_Prescaler =psc; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //PWM模式配置(分通道进行配置)TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;TIM_OC1Init(TIM3,&TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable); TIM_Cmd(TIM3,ENABLE); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OC2Init(TIM3, &TIM_OCInitStructure); TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_Cmd(TIM3, ENABLE); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OC3Init(TIM3, &TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_Cmd(TIM3, ENABLE);
}#include "main.h"//211uint16_t t1,t2,t3;int main(void)
{ init_ALL(); //初始化所有函数:t1=150;t2=150;t3=150; while(1){ delay_ms(300);t1++;t2++;t3++;printf("%d",t1);//到达设定最大角度时返回到0度if(t1==263) {t1=150;}if(t2==263) {t2=150;}if(t3==263) {t3=150;}TIM_SetCompare1(TIM3,t1); //设置舵机占空比,控制舵机转动TIM_SetCompare2(TIM3,t2); //设置舵机占空比,控制舵机转动TIM_SetCompare3(TIM3,t3); //设置舵机占空比,控制舵机转动 }
}//初始化所有函数:
void init_ALL(void)
{Usart1_Init(115200); //初始化串口1printf("HELLO \r\n"); //串口1 测试重定向PrintfSysTick_Init(72);Timer2_Init();Timer3_PWM_init(2000,719); //初始化定时器3PWM}
测试视频结果:
STM32 F103C8T6控制舵机视频
测试工程下载:
https://download.csdn.net/download/qq_64257614/88206611?spm=1001.2014.3001.5503
相关文章:

STM32 F103C8T6学习笔记5:定时器输出不同占空比PWM驱动舵机旋转角度
现在学习使用STM32 F103C8T6的定时器PWM模式,使用PWM驱动舵机转动不同角度,文章提供源码,测试工程,测试动态效果图。 目录 基础原理: 实验目标: 测试视频结果: 测试工程下载: 基…...
液体神经网络:LNN是个啥概念?
一、说明 在在人工智能领域,神经网络已被证明是解决复杂问题的非常强大的工具。多年来,研究人员不断寻求创新方法来提高其性能并扩展其能力。其中一种方法是液体神经网络(LNN)的概念,这是一个利用动态计算功能的迷人框…...
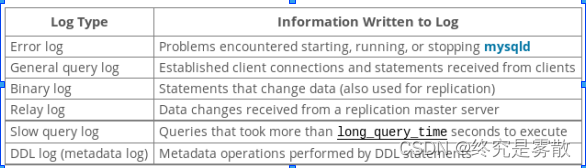
开源数据库Mysql_DBA运维实战 (DCL/日志)
SQL(Structured Query Language 即结构化查询语言) a.DDL语句 数据库定义语言: 数据库,表,视图,索引,存储过程,函数,创建删除ALTER(CREATE DROP ALTER) b.DML语句 数…...

神经网络基础-神经网络补充概念-03-逻辑回归损失函数
概念 逻辑回归使用的损失函数通常是"对数损失"(也称为"交叉熵损失")或"逻辑损失"。这些损失函数在训练过程中用于衡量模型预测与实际标签之间的差异,从而帮助模型逐步调整权重参数,以更好地拟合数…...
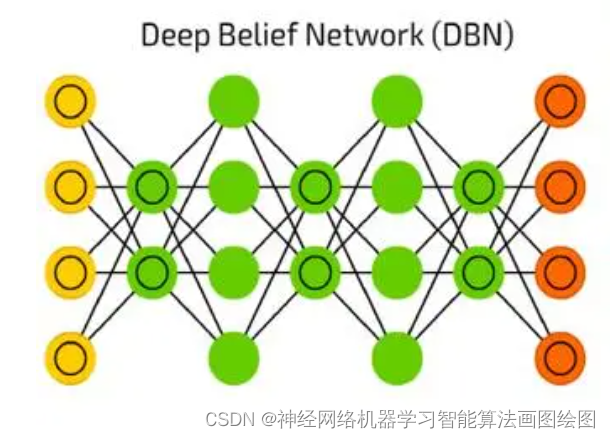
基于深度信念神经网络的矿石产量预测,基于DBN的矿石产量预测,DBN的详细原理
目录 背影 DBN神经网络的原理 DBN神经网络的定义 受限玻尔兹曼机(RBM) DBN的矿石产量预测 基本结构 主要参数 数据 MATALB代码 结果图 展望 背影 DBN是一种深度学习神经网络,拥有提取特征,非监督学习的能力,是一种非常好的分类算法,本文将DBN算法进行矿石产量预测 DB…...

JavaWeb-Filter过滤器
目录 Filter过滤器 1. Filter的生命周期 2.Filter的配置 3.拦截路径 4.拦截具体的使用 5.拦截方式配置(资源被访问方式) 6.FilterChain拦截链 Filter过滤器 filter是过滤器,相比于Servlet的发送请求,filter是用于拦截请求。…...

python如何实现1ms内触发两个接口请求
在Python中,可以通过多线程或者协程来实现1ms内触发两个接口请求。以下是两种方法的示例代码: 1.多线程实现: import threading import requestsdef send_request(url):response requests.get(url)print(response.text)# 创建两个线程&…...

深入解析路由与网络:网络的脉络
目录 路由 广域网 公网 外网 局域网 内网 以太网 Wi-Fi CDN IPv4和IPv6 IP地址分类 无类别域间路由(CIDR) 路由 路由是指在计算机网络中,将数据包从源地址传递到目标地址的过程。在一个复杂的网络中,数据包需要经过多…...

spring.HttpMessageNotReadableException: JSON parse error
实体类如下: Value public class Search{//搜索内容String value;//是否模糊搜索boolean fuzzy true; //其实这样写并不是“默认”模糊搜索,而是“一定是”模糊搜索 }spring.HttpMessageNotReadableException: JSON parse error: Cannot construct ins…...

安全中间件的设计思路和简单实践
rasp 的侵入式特性和拦截特性导致开发和运维普通不太愿意配合,当生产环境出现问题时往往第一时间先把责任推给 rasp,逐渐的安全部门普遍只能把 rasp 设置为告警模式,而且越是大的集群拦截开的就越少,所以字节的 elkeid 和某外卖大…...

试卷扫描成电子版方法分享,这个方法不要错过
很多时候,为了方便传输我们需要将试卷扫描成电子版进行存档,以备不时之需。很多小伙伴如果遇到试卷需要扫描转成电子版可能就不知道该如何操作了,其实试卷扫描是一项非常重要的工作,因此需要注意一些方法和细节。以下是试卷扫描成…...
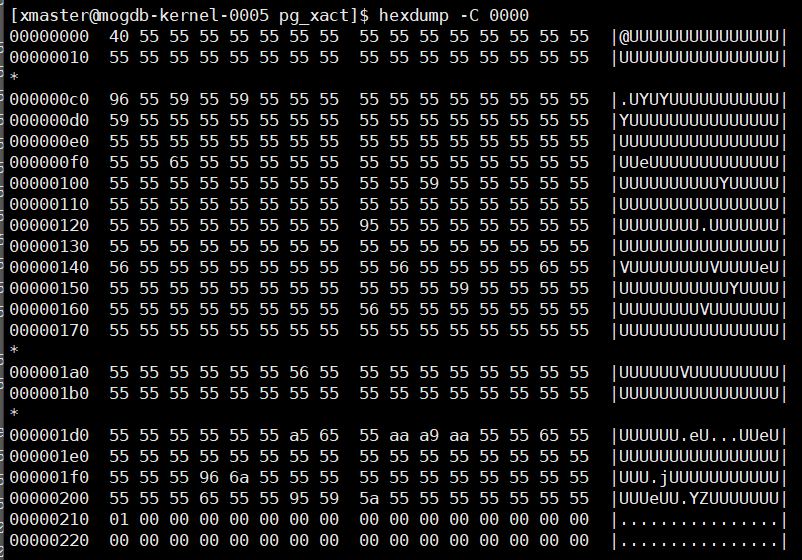
【PostgreSQL的CLOG解析】
同样还是这张图,之前发过shared_buffer和os cache、wal buffer和work mem的文章,今天的主题是图中的clog,即 commit log,PostgreSQL10之前放在数据库目录的pg_clog下面。PostgreSQL10之后修更名为xact,数据目录变更为pg_xact下面&…...

腾讯云国际站代充-阿里云ECS怎么一键迁移到腾讯云cvm?
今天主要来介绍一下如何通过阿里云国际ECS控制台一键迁移至腾讯云国际CVM。腾讯云国际站云服务器CVM提供全面广泛的服务内容。无-需-绑-定PayPal,代-充-值腾讯云国际站、阿里云国际站、AWS亚马逊云、GCP谷歌云,官方授权经销商!靠谱࿰…...

东方晶源亮相第十一届半导体设备年会,共话发展“芯”机遇
8月11日,以“协力同芯抢机遇,集成创新造设备”为主题的第十一届(2023年)中国电子专用设备工业协会半导体设备年会暨产业链合作论坛(CSEAC)在无锡太湖国际博览中心圆满闭幕。为期3天的CSEAC,通过…...

git修改历史commit信息
修改历史提交 commit 的信息 操作步骤: git rebase -i 列出 commit 列表找到需要修改的 commit 记录,把 pick 修改为 edit 或 e,:wq 保存退出修改 commit 的具体信息git commit --amend,保存并继续下一条git 4. 4. rebase --cont…...
基于K8S环境部署Dolphinscheduler及简单应用
一、Dolphinscheduler简介 Apache DolphinScheduler 是一个分布式易扩展的可视化DAG工作流任务调度开源系统。适用于企业级场景,提供了一个可视化操作任务、工作流和全生命周期数据处理过程的解决方案。 Apache DolphinScheduler 旨在解决复杂的大数据任务依赖关系,并为应用…...

Linux的ln命令
ln是link的缩写,在Linux中 ln 命令的功能是为某一个文件在另外一个位置建立一个同步的链接,当我们需要在不同的目录,用到相同的文件时,我们不需要在每一个需要的目录下都放一个必须相同的文件,我们只要在某个固定的目录࿰…...

深入了解Bear Necessities Hackathon黑客松的优胜者们
生态系统中的资深建设者皆知道Moonbeam是大型黑客松狂热爱好者,不论是线上虚拟的还是现场的。然而,很少有黑客松能达到Moonbeam和AWS举办的Bear Necessities黑客松这样的规模和吸引力。本次黑客松共有755人参与,共提交了62份参赛作品。其中22…...

mysql-tokudb使用qa
一、使用前提 安装tokudb引擎的前提条件是物理机要关闭大页,并需要注意物理机所剩内存和配置文件中tokudb_cache_size(内存主要占用部分),innodb_buffer_pool_size的使用,另外tokudb的安装一定要安装libjemalloc依赖&…...
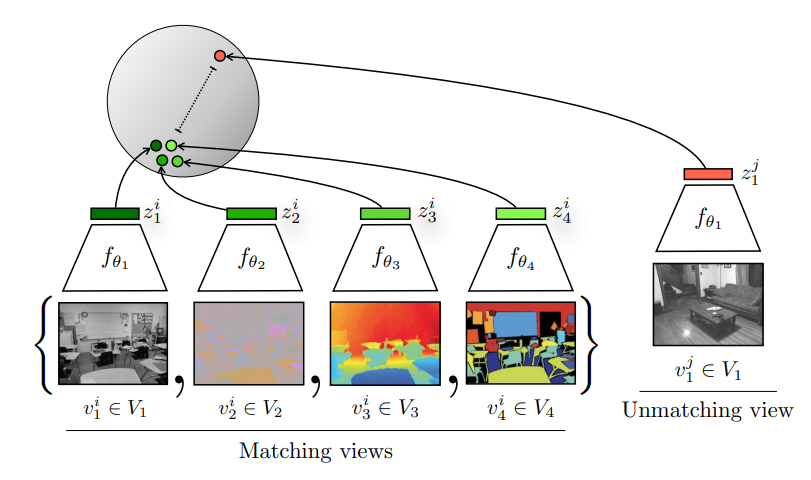
对比学习论文综述总结
第一阶段:百花齐放(18-19中) 有InstDisc(Instance Discrimination)、CPC、CMC代表工作。在这个阶段方法模型都还没有统一,目标函数也没有统一,代理任务也没有统一,所以说是一个百花齐放的时代 1 判别式代理任务---个体判别任务 1.1 Inst Dict---一个编码器+一个memory…...

机器学习势能面构建实战:从量子化学数据到高精度分子模拟
1. 项目概述:当机器学习“学会”了化学反应的势能面在计算化学的世界里,我们一直面临着一个核心矛盾:精度与效率的权衡。如果你想精确地描述一个化学反应,比如DNA复制过程中碱基对的质子转移,你需要动用量子化学方法&a…...

2026脑机接口与大模型融合架构解析
引言当一位渐冻症患者在脑海中浮现 “我想喝床头那杯温水” 的念头,传统脑机接口(BCI)或许只能识别出 “喝水” 这一模糊的宏观意图,却无法捕捉 “温水”“床头杯” 这些细节;当健康用户试图通过意念控制智能家居&…...

iOS抓包防护绕过:合规调试的三层穿透实践
1. 这不是“破解”,而是开发者本该掌握的合规调试能力很多人看到“iOS抓包防护绕过”第一反应是:这不就是搞逆向、破壳、绕过安全检测?甚至下意识联想到灰色工具链或越狱环境。但我要先说清楚——本文所有操作,均在苹果官方允许的…...

Kubernetes可观测性体系构建:全面监控与故障排查指南
Kubernetes可观测性体系构建:全面监控与故障排查指南 一、可观测性概述 可观测性(Observability) 是指通过系统产生的数据来理解系统内部状态的能力。在Kubernetes中,可观测性体系包含三个核心维度:指标(…...

AI 时代产品经理生存与进化指南
AI 时代产品经理生存与进化指南 三重知识体系的交汇:NPDP产品开发 PMP项目管理 AI原生方法论 本文档整合了 NPDP(新产品开发专业人士认证)、PMP(项目管理专业人士认证)与 Anthropic 产品负责人 Catherine Wu…...

为Hermes Agent配置Taotoken自定义供应商接入大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Hermes Agent配置Taotoken自定义供应商接入大模型 Hermes Agent 是一个功能强大的AI智能体开发框架,它支持通过自定义…...

【LeetCode刷题日记】二叉搜索树 的中序遍历 + 前驱指针,一套模板解决530.最小绝对差|501.二叉搜索树中的众数
🔥个人主页:北极的代码(欢迎来访) 🎬作者简介:java后端学习者 ❄️个人专栏:苍穹外卖日记,SSM框架深入,JavaWeb ✨命运的结局尽可永在,不屈的挑战却不可须臾或…...

终极指南:5分钟快速上手Eclipse Ditto数字孪生平台
终极指南:5分钟快速上手Eclipse Ditto数字孪生平台 【免费下载链接】ditto Eclipse Ditto™: Digital Twin framework of Eclipse IoT - main repository 项目地址: https://gitcode.com/gh_mirrors/ditto6/ditto 想要在物联网项目中轻松管理成千上万的设备吗…...

AI Agent在DevOps中的应用:自主监控、根因分析与故障修复
AI Agent在DevOps中的应用:自主监控、根因分析与故障修复 引言 痛点引入:现代DevOps团队的“三座大山” 想象一个场景:周五晚上23:58,你正准备关掉电脑奔赴周末的露营烧烤局,手机突然弹出数十条Prometheus、ELK Sta…...

5个高效模组管理技巧:打造完美的XCOM 2游戏体验
5个高效模组管理技巧:打造完美的XCOM 2游戏体验 【免费下载链接】xcom2-launcher The Alternative Mod Launcher (AML) is a replacement for the default game launchers from XCOM 2 and XCOM Chimera Squad. 项目地址: https://gitcode.com/gh_mirrors/xc/xcom…...