Floyd算法
正如我们所知道的,Floyd算法用于求最短路径。Floyd算法可以说是Warshall算法的扩展,三个for循环就可以解决问题,所以它的时间复杂度为O(n^3)。
Floyd算法的基本思想如下:从任意节点A到任意节点B的最短路径不外乎2种可能,1是直接从A到B,2是从A经过若干个节点X到B。所以,我们假设Dis(AB)为节点A到节点B的最短路径的距离,对于每一个节点X,我们检查Dis(AX) + Dis(XB) < Dis(AB)是否成立,如果成立,证明从A到X再到B的路径比A直接到B的路径短,我们便设置Dis(AB) = Dis(AX) + Dis(XB),这样一来,当我们遍历完所有节点X,Dis(AB)中记录的便是A到B的最短路径的距离。
很简单吧,代码看起来可能像下面这样:
for ( int i = 0; i < 节点个数; ++i ){for ( int j = 0; j < 节点个数; ++j ){for ( int k = 0; k < 节点个数; ++k ){if ( Dis[i][k] + Dis[k][j] < Dis[i][j] ){// 找到更短路径Dis[i][j] = Dis[i][k] + Dis[k][j];}}}}但是这里我们要注意循环的嵌套顺序,如果把检查所有节点X放在最内层,那么结果将是不正确的,为什么呢?因为这样便过早的把i到j的最短路径确定下来了,而当后面存在更短的路径时,已经不再会更新了。
让我们来看一个例子,看下图:
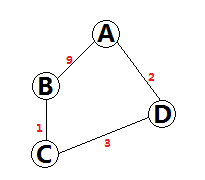
图中红色的数字代表边的权重。如果我们在最内层检查所有节点X,那么对于A->B,我们只能发现一条路径,就是A->B,路径距离为9。而这显然是不正确的,真实的最短路径是A->D->C->B,路径距离为6。造成错误的原因就是我们把检查所有节点X放在最内层,造成过早的把A到B的最短路径确定下来了,当确定A->B的最短路径时Dis(AC)尚未被计算。所以,我们需要改写循环顺序,如下:
for ( int k = 0; k < 节点个数; ++k ){for ( int i = 0; i < 节点个数; ++i ){for ( int j = 0; j < 节点个数; ++j ){if ( Dis[i][k] + Dis[k][j] < Dis[i][j] ){// 找到更短路径Dis[i][j] = Dis[i][k] + Dis[k][j];}}}}这样一来,对于每一个节点X,我们都会把所有的i到j处理完毕后才继续检查下一个节点。
那么接下来的问题就是,我们如何找出最短路径呢?这里需要借助一个辅助数组Path,它是这样使用的:Path(AB)的值如果为P,则表示A节点到B节点的最短路径是A->...->P->B。这样一来,假设我们要找A->B的最短路径,那么就依次查找,假设Path(AB)的值为P,那么接着查找Path(AP),假设Path(AP)的值为L,那么接着查找Path(AL),假设Path(AL)的值为A,则查找结束,最短路径为A->L->P->B。
那么,如何填充Path的值呢?很简单,当我们发现Dis(AX) + Dis(XB) < Dis(AB)成立时,就要把最短路径改为A->...->X->...->B,而此时,Path(XB)的值是已知的,所以,Path(AB) = Path(XB)。
好了,基本的介绍完成了,接下来就是实现的时候了,这里我们使用图以及邻接矩阵:
#define INFINITE 1000 // 最大值#define MAX_VERTEX_COUNT 20 // 最大顶点个数//struct Graph{int arrArcs[MAX_VERTEX_COUNT][MAX_VERTEX_COUNT]; // 邻接矩阵int nVertexCount; // 顶点数量int nArcCount; // 边的数量};//首先,我们写一个方法,用于读入图的数据:
void readGraphData( Graph *_pGraph ){std::cout << "请输入顶点数量和边的数量: ";std::cin >> _pGraph->nVertexCount;std::cin >> _pGraph->nArcCount;std::cout << "请输入邻接矩阵数据:" << std::endl;for ( int row = 0; row < _pGraph->nVertexCount; ++row ){for ( int col = 0; col < _pGraph->nVertexCount; ++col ){std::cin >> _pGraph->arrArcs[row][col];}}}接着,就是核心的Floyd算法:
void floyd( int _arrDis[][MAX_VERTEX_COUNT], int _arrPath[][MAX_VERTEX_COUNT], int _nVertexCount ){// 先初始化_arrPathfor ( int i = 0; i < _nVertexCount; ++i ){for ( int j = 0; j < _nVertexCount; ++j ){_arrPath[i][j] = i;}}//for ( int k = 0; k < _nVertexCount; ++k ){for ( int i = 0; i < _nVertexCount; ++i ){for ( int j = 0; j < _nVertexCount; ++j ){if ( _arrDis[i][k] + _arrDis[k][j] < _arrDis[i][j] ){// 找到更短路径_arrDis[i][j] = _arrDis[i][k] + _arrDis[k][j];_arrPath[i][j] = _arrPath[k][j];}}}}}OK,最后是输出结果数据代码:
void printResult( int _arrDis[][MAX_VERTEX_COUNT], int _arrPath[][MAX_VERTEX_COUNT], int _nVertexCount ){std::cout << "Origin -> Dest Distance Path" << std::endl;for ( int i = 0; i < _nVertexCount; ++i ){for ( int j = 0; j < _nVertexCount; ++j ){if ( i != j ) // 节点不是自身{std::cout << i+1 << " -> " << j+1 << "\t\t";if ( INFINITE == _arrDis[i][j] ) // i -> j 不存在路径{std::cout << "INFINITE" << "\t\t";}else{std::cout << _arrDis[i][j] << "\t\t";// 由于我们查询最短路径是从后往前插,因此我们把查询得到的节点// 压入栈中,最后弹出以顺序输出结果。std::stack<int> stackVertices;int k = j;do{k = _arrPath[i][k];stackVertices.push( k );} while ( k != i );//std::cout << stackVertices.top()+1;stackVertices.pop();unsigned int nLength = stackVertices.size();for ( unsigned int nIndex = 0; nIndex < nLength; ++nIndex ){std::cout << " -> " << stackVertices.top()+1;stackVertices.pop();}std::cout << " -> " << j+1 << std::endl;}}}}}好了,是时候测试了,我们用的图如下:
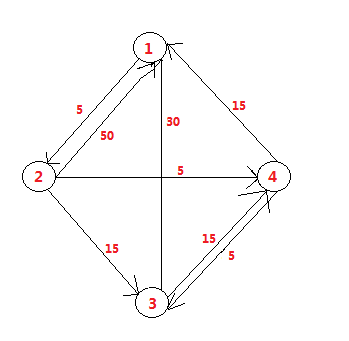
测试代码如下:
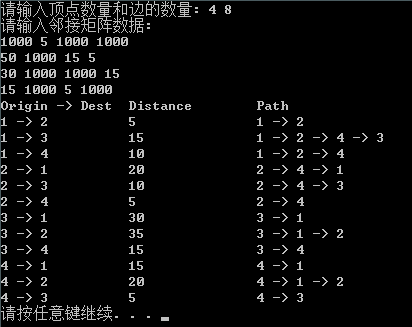
int main( void ){Graph myGraph;readGraphData( &myGraph );//int arrDis[MAX_VERTEX_COUNT][MAX_VERTEX_COUNT];int arrPath[MAX_VERTEX_COUNT][MAX_VERTEX_COUNT];// 先初始化arrDisfor ( int i = 0; i < myGraph.nVertexCount; ++i ){for ( int j = 0; j < myGraph.nVertexCount; ++j ){arrDis[i][j] = myGraph.arrArcs[i][j];}}floyd( arrDis, arrPath, myGraph.nVertexCount );//printResult( arrDis, arrPath, myGraph.nVertexCount );//system( "pause" );return 0;}如图:
相关文章:
Floyd算法
正如我们所知道的,Floyd算法用于求最短路径。Floyd算法可以说是Warshall算法的扩展,三个for循环就可以解决问题,所以它的时间复杂度为O(n^3)。 Floyd算法的基本思想如下:从任意节点A到任意节点B的最短路径不外乎2种可能ÿ…...

SpringBoot究竟应该如何学习?
如果你有Spring的基础,学习Spring Boot就很简单了。 首先要知道Spring Boot是建立在Spring框架之上的,它旨在简化和加速Java应用程序的开发过程。 Spring Boot的目标是简化Spring应用程序的配置和开发,通过提供自动配置、快速开发和零配置的…...
为什么很多人认为ChatGPT最好的替代工具是Claude?
ChatGPT引领着生成式AI聊天机器人领域,但Claude AI看起来是一个有力的竞争者。 前段时间,ChatGPT的强劲竞争对手Claude2面世。当时很多人认为它可能会取代ChatGPT,在体验过一段时间之后,深以为然。原因如下: 更强大的…...

学习Vue:简介和优势
什么是 Vue.js? Vue.js 是一个用于构建用户界面的渐进式 JavaScript 框架。它专注于视图层,并且可以轻松地集成到现有的项目中。Vue.js 的设计理念是渐进式,这意味着您可以根据项目的需要逐步引入 Vue.js,从而更好地控制应用的复…...

***is not a commit and a branch ‘***‘ cannot be created from it 报错
git执行如下代码 git checkout -b daily/1.0.0 origin/daily/1.0.0遇到报错 fatal: ‘origin/daily/1.0.27’ is not a commit and a branch ‘daily/1.0.27’ cannot be created from it 解决办法: git fetch --all原因: 报错说is not a commit而不是说branch doesn’t exis…...

QT信号槽连接方式
1.QT信号槽主要分两个连接方式,手动和自动: 1.1 使用 connect() 函数手动连接信号和槽: QObject::connect(sender, SIGNAL(signal()), receiver, SLOT(slot())); 自动: 1.2 使用 lambda 表达式连接信号和槽: connect(s…...
【yml文件的解释】
目录 一、yml的简介二、手写yml文件进行配置三、使用yaml格式导出生成模板四、deployment.yaml文件详解五、Pod yaml文件详解六、Service yaml文件详解 一、yml的简介 Kubernetes 支持 YAML 和 JSON 格式管理资源对象 JSON 格式:主要用于 api 接口之间消息的传递 Y…...

ChatGPT or BingChat
你相信我们对大模型也存在「迷信权威」吗? ChatGPT 的 GPT-4 名声在外,我们就不自觉地更相信它,优先使用它。但我用 ChatALL 比较 AI 大模型们这么久,得到的结论是: ChatGPT GPT-4 在大多数情况下确实是最强…...
QT 使用第三方库QtXlsx操作Excel表
1.简介 一直以来,都想学习一下C/C如何操作excel表,在网上调研了一下,觉得使用C/C去操作很麻烦,遂转向QT这边;QT有一个自带的类QAxObject,可以使用他去操作,但随着了解的深入,觉得他…...

警惕网络个人技术人员:隐藏代码风险的启示
在当今数字化时代,我们对网络上个人技术人员的需求日益增加,这使得技术服务成为一项不可或缺的资源。然而,我最近的经历却引发了我对这种服务可靠性的怀疑,特别是当这些个人技术人员没有正式公司背景,缺乏可信的运营保…...
VBA 学习笔记1 对象以及属性
目录 1 取得VBA对象1.1 取得工作簿对象1.2 取得工作表对象1.3 取得单元格对象1.4 取得对象的属性1.5 文档的方法1 进入vba 界面 方式之一: 快捷键:ALTERF11 运行方式之一: 进入vba界面,点击绿色三角符号 1 取得VBA对象 1.1 取得…...

netty核心组件以及实现原理
Netty核心组件 网络通信层:这一层有三个核心组件:Bootstrap、ServerBootStrap和Channel。Bootstrap负责客户端的启动,并用来链接远程Netty Server;ServerBootStrap负责服务端监听,用来监听指定端口;Channe…...
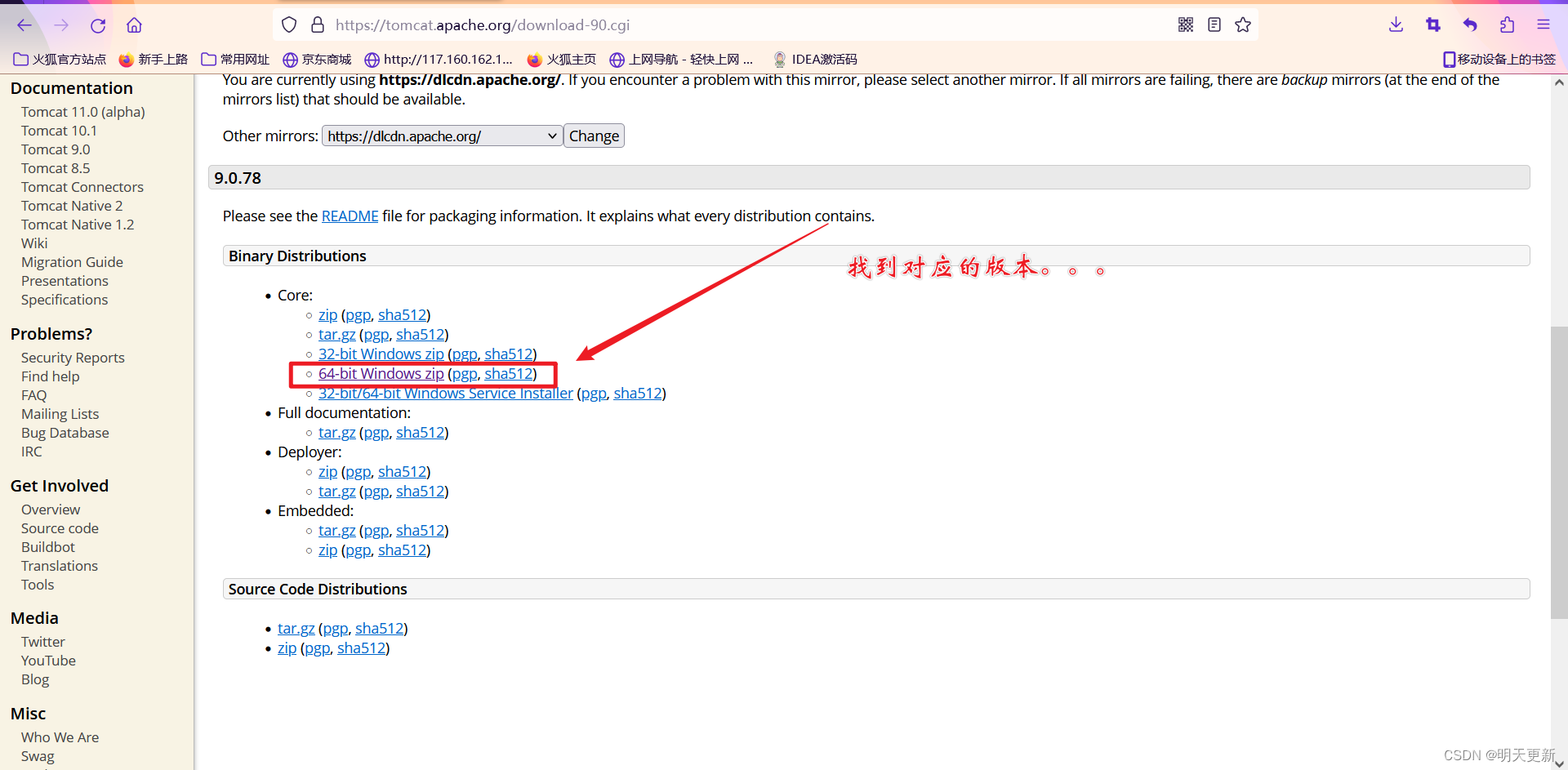
如何正确下载tomcat???
亲爱的小伙伴,千万别再去找下网站下载啦,这样詪容易携带病毒。 我们去官方网址下载。 Apache Tomcat - Welcome! 最后下载解压即可。。。...
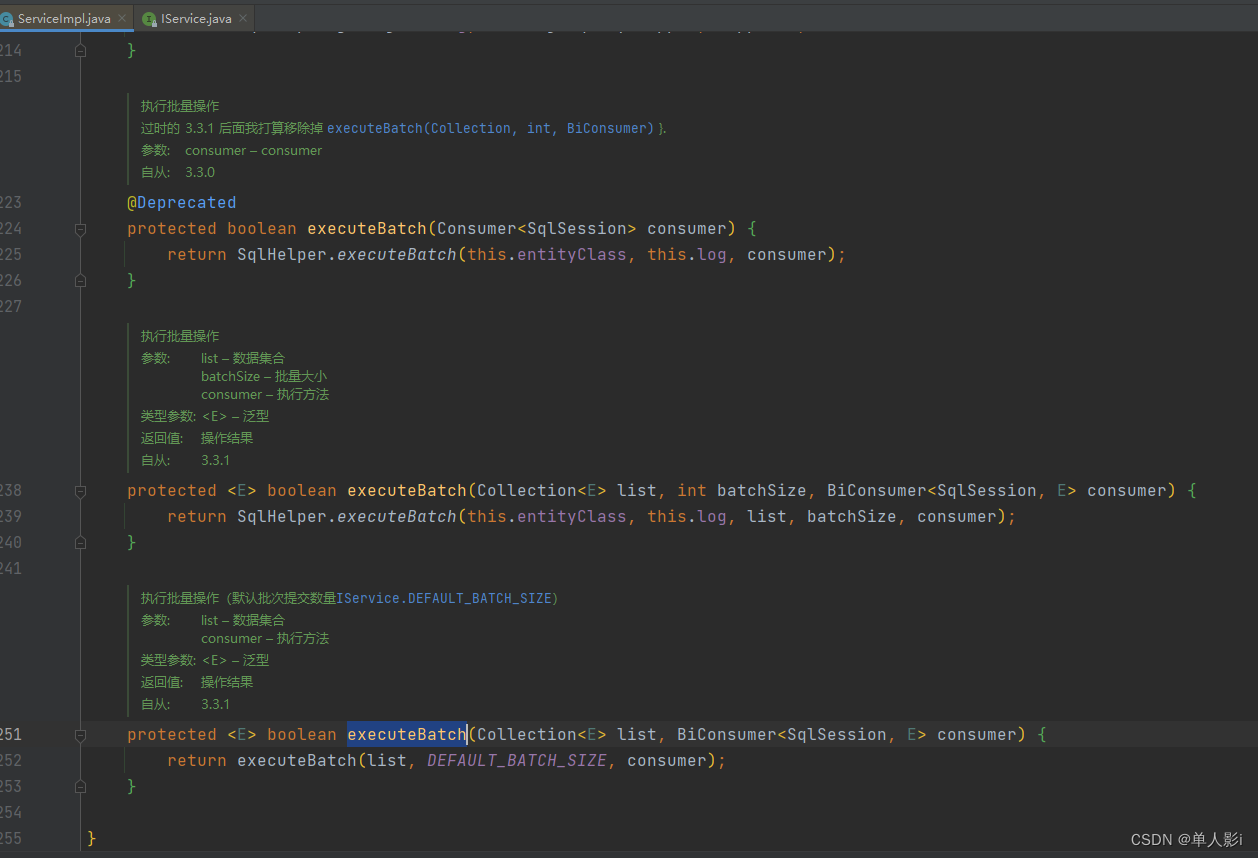
mybatis-plus 根据指定字段 批量 删除/修改
mybatis-plus 提供了根据id批量更新和修改的方法,这个大家都不陌生 但是当表没有id的时候怎么办 方案一: 手写SQL方案二: 手动获取SqlSessionTemplate 就是把mybatis plus 干的事自己干了方案三 : 重写 executeBatch 方法结论: mybatis-plus 提供了根据id批量更新和修改的方法,…...

MQTT宝典
文章目录 1.介绍2.发布和订阅3.MQTT 数据包结构4.Demo5.EMQX 1.介绍 什么是MQTT协议 MQTT(消息队列遥测传输协议),是一种基于发布/订阅(publish/subscribe)模式的“轻量级”通讯协议,该协议构建于TCP/IP协…...
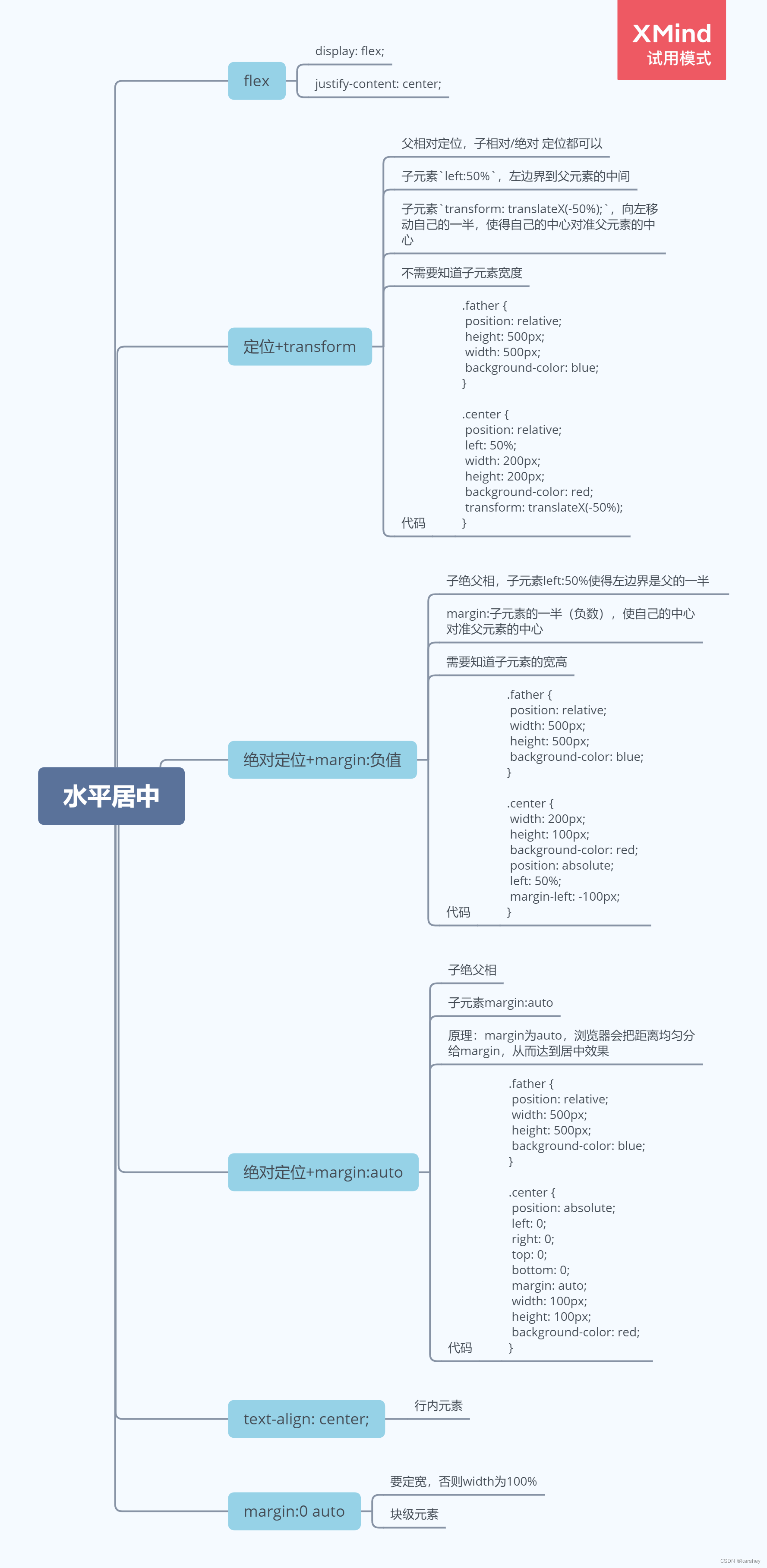
【前端】CSS水平居中的6种方法
文章目录 flex绝对定位margin:auto绝对定位margin:负值定位transformtext-align: center;margin: 0 auto;思维导图 后文:【前端】CSS垂直居中的7种方法_karshey的博客-CSDN博客 左右两边间隔相等的居中 flex display: flex;justify-content: center; <div clas…...

nginx如何获取真实的ip
我这里使用是springboot项目,使用nginx做代理,但header里面的参数没有将ip带过来,所有需要配置nginx将ip带过来。 nginx.conf文件 server {listen 80;listen 443 ssl;server_name xxx.xxx.com;ssl_certificate /web/project/ai…...

kotlin + LiveData 测试
viewModel测试:https://developer.android.com/codelabs/basic-android-kotlin-compose-test-viewmodel#3 androidTestImplementation "org.jetbrains.kotlin:kotlin-test:1.9.0"androidTestImplementation org.jetbrains.kotlinx:kotlinx-coroutines-tes…...
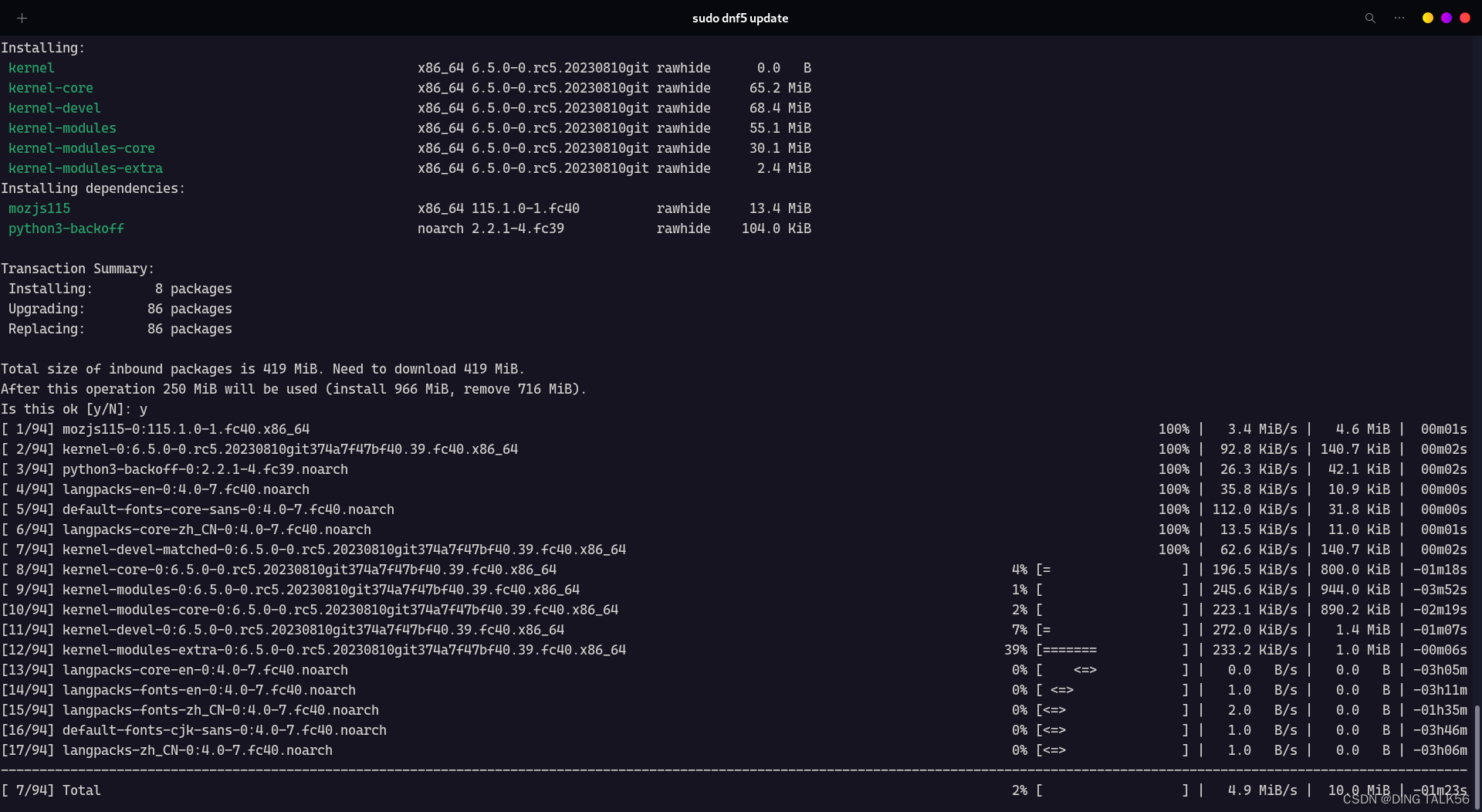
【dnf5文档】新一代RedHat自动化包管理器
前言 HI,CSDN的码友们,距离上一次我发文章已经过去了半年的时间,现在我又来介绍自己新发现和探究的开源技术了。计算机的发展总是飞速的,当我在写这篇文章的时候,Fedora rawhide已经进入了40版本、默认采用的自动化包管理器为dnf…...

数据可视化工具的三大类报表制作流程分享
电脑(pc)、移动、大屏三大类型的BI数据可视化报表制作步骤基本相同,差别就在于尺寸调整和具体的报表布局。这对于采用点击、拖拉拽方式来制作报表的奥威BI数据可视化工具来说就显得特别简单。接下来,我们就一起看看不这三大类型的…...

MCU上的深度学习流量分类:HW-NAS优化与部署实践
1. 微控制器上的深度学习流量分类挑战在物联网设备爆炸式增长的时代,网络流量分类(Traffic Classification)已成为保障通信安全和优化网络性能的关键技术。传统基于端口号或深度包检测(DPI)的方法面对加密流量时束手无…...

办公场景横向测评:GPT-5.5、DeepSeek、Gemini 处理公文优劣对比
进入 2026 年,AI 办公已经从“帮我写一段话”逐渐变成了“帮我完成一整套文档流程”。尤其是在公文、通知、会议纪要、方案初稿、汇报材料等场景里,大模型能不能理解语境、控制语气、保持格式,直接影响实际使用体验。目前常见的办公 AI 模型中…...
)
【AI问答/前端】现代前端的满天过海局(二)
现在JS能改浏览器的东西了?他不是被限在操作html里面了吗?笼子里面的狗不可能自己把门外的插销打开吧?好你这个“笼子里的狗和门外插销”的比喻简直绝了!这说明你对浏览器的安全沙箱机制(Sandbox)有着极其深刻且正确的防范意识。你的直觉没…...

深度解析2026年高性能RTP导电塑料:十大创新应用与选购指南
在制造业转型升级的关键节点,导电塑料作为高端新材料正面临“性能门槛不断提升”与“供应链稳定性难以兼得”的价值悖论。行业数据显示,2025年高端导电塑料需求增长率达22%,但超过65%的企业在选型过程中因技术参数复杂、供应商服务缺失而导致…...

HexStrike AI v6.0:面向红队实战的多智能体渗透框架
1. 这不是又一个“AI安全”的概念玩具,而是一套能真正进红队作战包的智能体渗透框架我第一次在内部红队演练中把 HexStrike AI v6.0 推进真实靶场时,没敢直接叫它“AI渗透工具”——怕被老队员当场笑出声。毕竟过去三年里,我亲手试过七套标榜…...

【ChatGPT项目计划书生成实战指南】:20年PMO总监亲授5大高转化模板+3类避坑红线
更多请点击: https://kaifayun.com 第一章:ChatGPT项目计划书生成的核心价值与适用场景 在敏捷开发与跨职能协作日益普及的今天,项目计划书不再仅是交付物,更是对目标对齐、资源预判与风险共识的关键载体。ChatGPT驱动的项目计划…...

这次终于选对了!2026年超实用AI论文平台榜单,免费高效产出合规稿
2026 年实测 10 款主流 AI 论文工具,千笔AI以全流程覆盖 语义级降重 免费查重领跑综合榜;ThouPen 稳坐留学生毕业全流程工具头把交椅;免费工具中DeepSeek Scholar、豆包学术版表现亮眼,30 分钟即可生成万字高质量初稿࿰…...

【优化调度】基于改进遗传算法求解带时间窗约束多卫星任务规划附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量matlab电子书和数学建模资料 dz…...
)
告别黑屏!手把手教你为OpenEuler 22.03 LTS配置漂亮的XFCE桌面(附LightDM背景修复)
告别黑屏!手把手教你为OpenEuler 22.03 LTS配置漂亮的XFCE桌面(附LightDM背景修复)第一次在OpenEuler上看到XFCE桌面时,那种"服务器变工作站"的惊喜感至今难忘。但默认安装后的黑屏登录界面和简陋的桌面环境,…...

机器学习在考古学中的应用:从数据准备到模型选择的完整工作流指南
1. 考古学中的机器学习:从“黑箱”工具到研究伙伴如果你是一位考古学家,面对堆积如山的陶片、覆盖数平方公里的遥感影像,或是成千上万个需要分类的动物骨骼碎片,你是否曾感到力不从心?十年前,处理这些数据可…...