ROSpider机器人评测报告
ROSpider机器人评测报告
最近入手了一款ROSpider六足仿生机器人,ROSpider是一款基于ROS 操作系统开发的智能视觉六足机器人。
外观
外观上ROSpider六足机器人如同名字一样有六只机械腿,整体来看像一只六腿的蜘蛛。腿上的关节处用了明亮的橙黄色很是显眼,这些关节是支持它完成各种动作的关键。在“蜘蛛”身体的上方装有Astra Pro深度相机,是ROSpider机器人的眼睛,它可以进行水平方向的旋转以及上下角度的变换,让ROSpider有了很大范围的视野。相机的后面是两支天线,两支可以灵活摆动的天线像耳朵一样可以帮助机器人接受各种信号。机器人整体感觉十分灵动,富有科技感的同时又有些可爱,很期待它后续的表现。

ROSpider六足机器人外观实拍图
有关指导手册
根据ROSpider六足机器人配套的开发手册的指导,我们进行了ROS系统的安装和环境的搭建,手册关于这一部分的引导并不是很详尽,有一些问题还需要自己在网络上查找解决。后续的对于各项功能和系统包括小车结构的介绍很仔细,各项实验操作引导也十分清晰明了。根据手册的内容,测试内容分为:仿生运动、基础AI视觉、3D视觉应用、深度学习、SLAM建图与导航和远场麦克风阵列等板块,接下来我们将根据个个板块展开测试。
ROSpider六足机器人实验手册
性能测试
仿生运动
在完成客户端与机器人通过机器人自带热点连接后,通过虚拟机对机器人发出简单的指令,确保它能做出相应的动作后,我们开始了对其仿生运动的测试。
在输入了相关指令后,机器人很好的完成了三角步态和波纹步态形式下各个方向的移动,还可以通过指令调节步幅和行进速度等;其机体的扭动也完成的很好。可见关节的灵活性非常的好,六足合作很协调,仿生的动作完成度很高,可以适应较为复杂的地形环境。
基础AI视觉及3D视觉应用
在机器人视觉部分,我们首先对该机器人的线条和色块的识别和追踪功能进行了测试,并用OpenCV视觉实现KCF算法。得益于深度摄像头的高精度取景测量,机器人在该项性能上对待识别物的识别率高。在巡线任务、自动化生产线、质量检测、物料搬运等场景能有所发挥。其后我们测试了深度相机对环境点云图的配置。最终得到的点云图具有丰富的几何形状和尺度信息,易受光照强度变化影响,多数情况下能够稳定得到周围环境的3D点云信息。在三维建模设计、自动驾驶、医学成像等方面具有较多的应用前景。
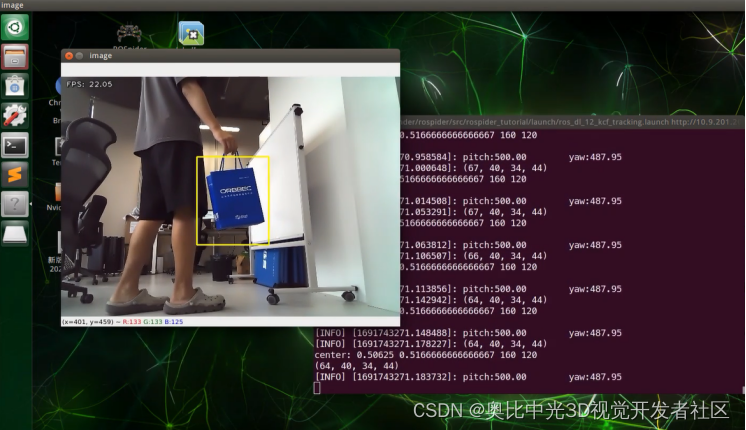
KCF算法实现目标跟随
录屏- KCF目标跟随效果展示
深度学习
另外这台六足机器人搭载了先进的深度学习技术,使其具备了强大的人脸识别和手势识别能力。通过MediaPipe软件,它可以快速、准确地识别出人脸和手势,从而实现更加智能化的交互体验。此外,这台机器人还可以通过ROS系统进行任务规划和控制,使得它可以灵活地适应不同的环境和任务需求。
录屏- 骨架跟随
人脸识别
在人脸识别过程中,系统会回传一幅包含目标人脸和一些脸部关键点的画面。这些关键点并不算太多,但是可以清晰地辨别出人脸,而且灵敏度和识别准确度都非常高。这意味着,即使是在复杂的环境下,这台六足机器人也可以快速、准确地识别出人脸,从而提高其交互能力和智能化水平。
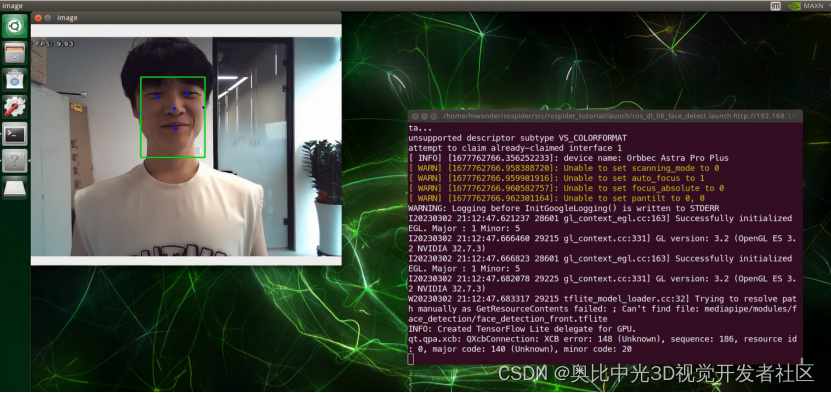
人脸识别截图
录屏- 人脸识别
手势识别
手势识别是用不同的手势作为命令,使机器人做出不同的仿生动作。“手枪”手势识别对应动作为“攻击”;“比心”手势识别对应动作为“扭动身体”;“拳头”手势识别对应动作为“向前扑”。手势的识别需要一定的响应时间,识别的准确度较高,偶尔识别偏差之后会自己纠正。

识别手势并作出对应动作
录屏- 手势识别
SLAM建图与导航
在SLAM建图与导航课程性能的实验测试中机器人能够准确地感知外界环境,实现SLAM建图、导航和路径规划并保存地图。
实验引导中介绍说是通过深度相机视觉与激光雷达进行融合建图与路径导航。在该性能的体验上,机器人第一次运行时出现扫描得到的二维/三维图出现一定的形变,后面降低了行进的速度之后,再进行扫描得到了较为精确的图像。
因此建议在运行这一功能时,应该适当降低行进速度以保证建图精确度。且机器人利用深度相机数据加强了对异形物体的识别率,在避障测试中得到理想的结果。
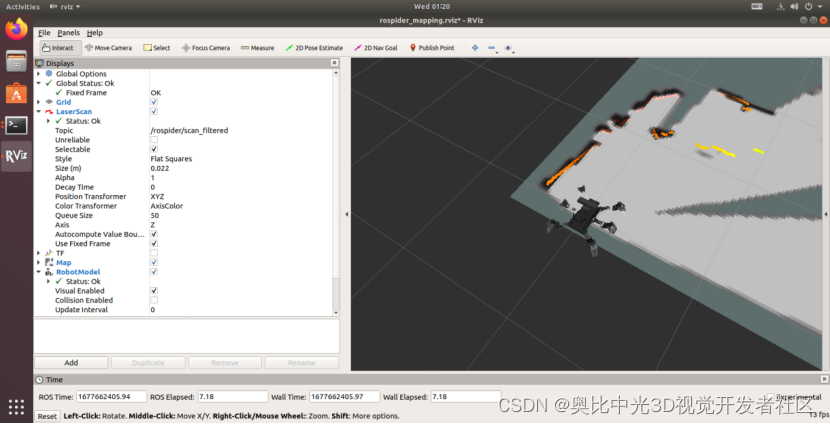
使用深度相机进行室内建图
总评建议
ROSpider六足机器人以奥比中光3D深度相机Astra Plus作为“智慧之眼”,同时搭载Jetson Nano主控制器、激光雷达、IMU传感器等高性能硬件配置,可实现建图导航、路径规划、跟随避障、语音识别等功能,以及物品识别、体感控制、目标追踪、口罩识别等AI视觉应用。功能丰富,性能良好,可以满足多方需求,适用于高校、高职领域的教学实验、科学研究和创新实践等领域。
相关文章:
ROSpider机器人评测报告
ROSpider机器人评测报告 最近入手了一款ROSpider六足仿生机器人,ROSpider是一款基于ROS 操作系统开发的智能视觉六足机器人。 外观 外观上ROSpider六足机器人如同名字一样有六只机械腿,整体来看像一只六腿的蜘蛛。腿上的关节处用了明亮的橙黄色很是显…...

在vue3 中,使用element-plus中的el-scrollbar,让内容元素自动滚动
在vue3 中,使用element-plus中的el-scrollbar,在el-scrollbar中如果元素过大出现滑动,就自动滑动,到底部时就返回顶部重新向下滑动,鼠标放入框内停止滑动 模板部分: <template><el-scrollbar…...
Redis——Redis.conf详解+Redis持久化(RDB和AOF)+Redis订阅发布
配置文件 redis启动时通过配置文件启动 原生配置文件全文在网上随便搜索一下就能找到了。 单位 配置文件 unit单位 对大小写不敏感 包含 类比import,将其他的配置文件引入 网络 bind 127.0.0.1 // 绑定ip protected-mode yes //是否受保护 po…...
16.1.2 Linux 的多用户多任务环境
在 Linux 下面执行一个指令时,系统会将相关的权限、属性、程序码与数据等均载入内存, 并给予这个单元一个程序识别码 (PID),最终该指令可以进行的任务则与这个 PID 的权限有关。根据这个说明,我们就可以简单…...
【11】Redis学习笔记 (微软windows版本)【Redis】
注意:官redis方不支持windows版本 只支持linux 此笔记是依托微软开发windows版本学习 一、前言 Redis简介: Redis(Remote Dictionary Server)是一个开源的内存数据结构存储系统,它也被称为数据结构服务器。Redis以键值对&am…...

数据结构刷题训练:用栈实现队列(力扣OJ)
目录 前言 1. 题目:用栈实现队列 2. 思路 3. 分析 3.1 定义 “ 队列 ” 3.2 创建队列 3.3 入队 3.4 队头数据 3.5 出队 3.6 判空和销毁 4.题解 总结 前言 栈和队列是数据结构中的两个重要概念,它们在算法和程序设计中都有着广泛的应用。本文将带你深入了…...
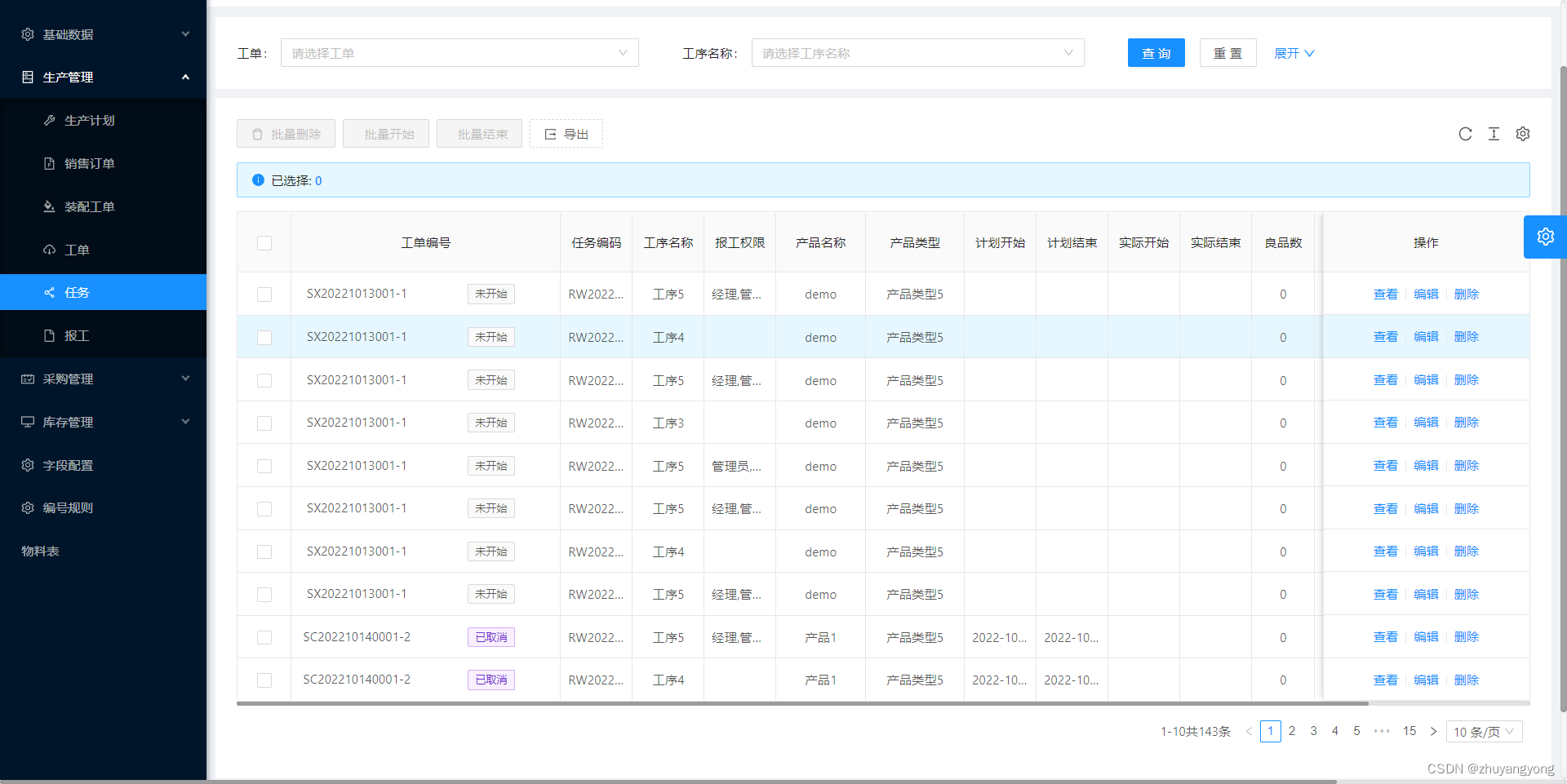
数字化车间mes生产执行管理系统
数字化车间mes是一款基于B/S结构的生产执行管理系统,主要目的是为中小企业提供了高效率、低成本、通用性强的一个MES系统解决方案,能够实时监控当前完成进度。 功能简介: 生产管理 大屏展示:可以从大屏展示页面看到任工序…...

SpringBoot + Mybatis多数据源
一、配置文件 spring: # datasource: # username: root # password: 123456 # url: jdbc:mysql://127.0.0.1:3306/jun01?characterEncodingutf-8&serverTimezoneUTC # driver-class-name: com.mysql.cj.jdbc.Driverdatasource:# 数据源1onedata:jdbc-url: j…...
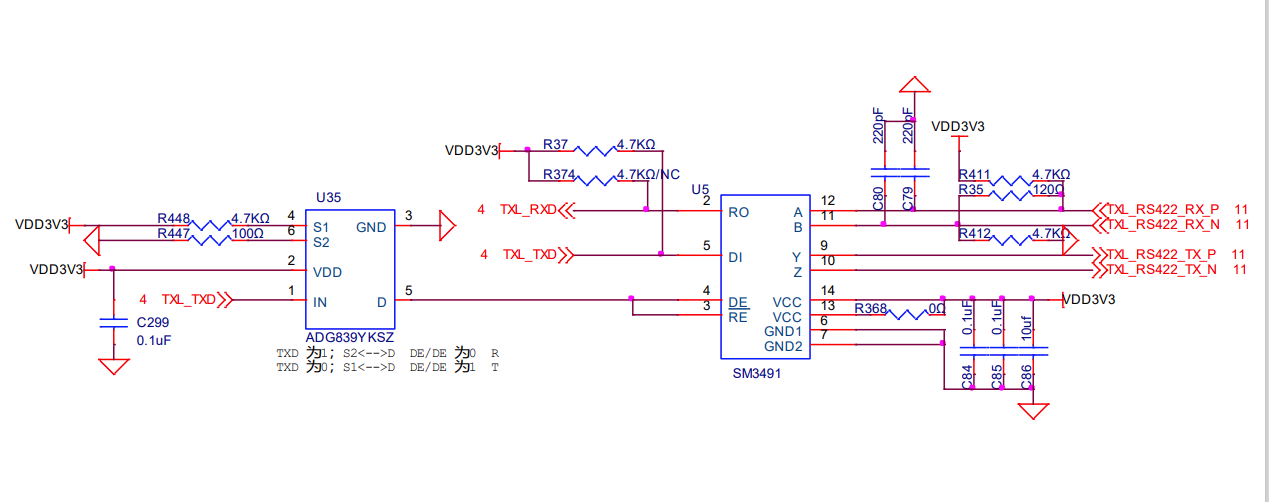
ad+硬件每日学习十个知识点(35)23.8.15 (接口电路:RS232、RS485、RS422,单线协议UART->TTL)
文章目录 1.RS232的物理层2.RS232的三种连线方式3.DB9和RJ45(网口)线定义4.RS232的电路设计(tx端需要上拉)5.RS232芯片MAX3221的引脚功能6.什么是压摆率?(压摆率越大越好)7.为什么有了RS232之后,还需要RS48…...
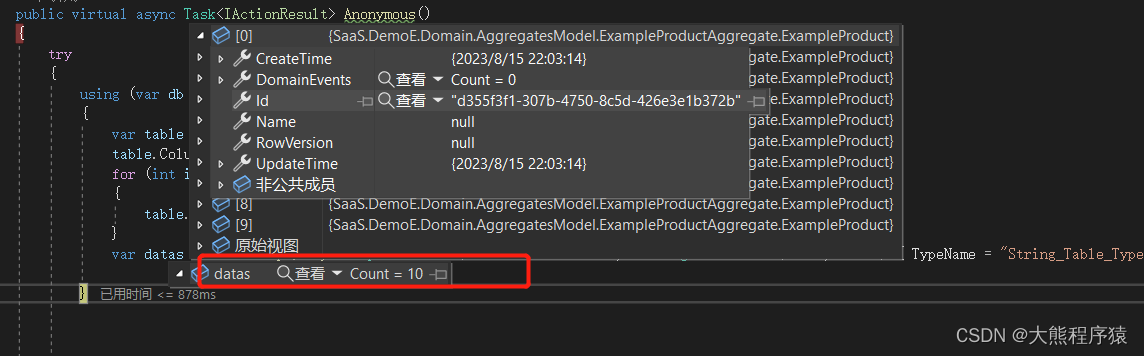
sql类型-用户定义表类型
一、创建用户定义表类型String_Table_Type CREATE TYPE String_Table_Type AS TABLE ( Id nvarchar(200) NOT NULL ) GO DECLARE test String_Table_Type INSERT INTO test VALUES(a),(b),(c) SELECT * FROM test 二、SqlSugar中使用...

小程序 vant 项目记录总结 使用 scss 分享 订阅消息 wxs 分包 echarts图表 canvas getCurrentPages页面栈
小程序 vant vant 下载 npm init -ynpm i vant/weapp -S --production修改 app.json 将 app.json 中的 “style”: “v2” 去除 修改 project.config.json {..."setting": {..."packNpmManually": true,"packNpmRelationList": [{"p…...
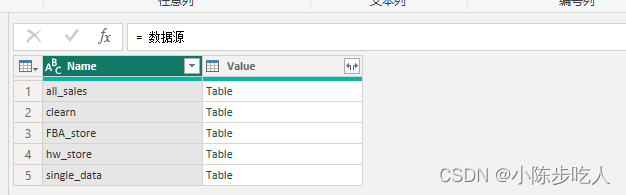
关于Power Query中一些忽略的细节
Power Query中一些忽略的细节 重新认识Power Query查询的引用----提高数据加载效率透视逆透视----一对“好朋友”神奇的拼接----实现很多意想不到的操作 重新认识Power Query 关于它的定义,这里不再赘述,主要说一些新的理解。 Power Query 可以理解就是一…...

QML与C++交互
目录 1 QML获取C的变量值 2 QML获取C创建的自定义对象 3 QML发送信号绑定C端的槽 4 C端发送信号绑定qml端槽 5 C调用QML端函数 1 QML获取C的变量值 QQmlApplicationEngine engine; 全局对象 上下文属性 QQmlApplicationEngine engine; QQmlContext *context1 engine.…...

Microsoft ISA服务器配置及日志分析
Microsoft ISA 分析器工具,可分析 Microsoft ISA 服务器(或 Forefront 威胁管理网关服务器)的日志并生成安全和流量报告。支持来自 Microsoft ISA 服务器组件的以下日志: 数据包过滤器ISA 服务器防火墙服务ISA 服务器网络代理服务…...
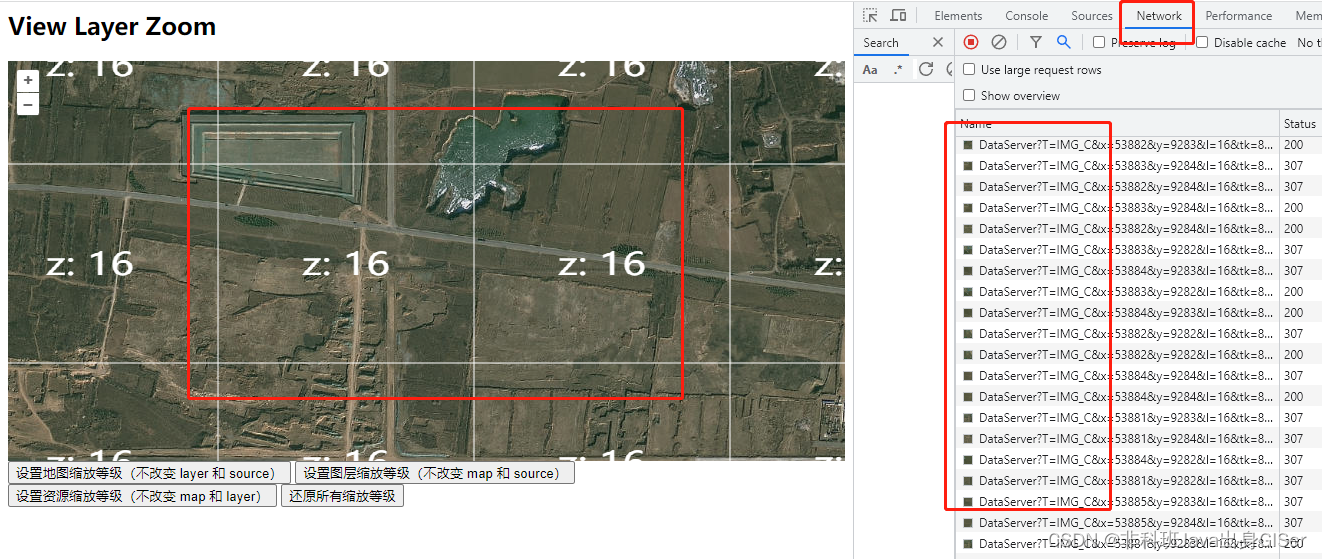
Openlayers 实战 - 地图视野(View)- 图层 -(layer)- 资源(source)显示等级设置。
Openlayers 实战 - 地图视野(View)- 图层 -(layer)- 资源(source)显示等级设置。 问题原因核心代码完整代码:在线示例 在以往的项目维护中,出现一个问题,使用最新高清底图…...

Linux:shell脚本 正则表达式与AWK
一、正则表达式 由一类特殊字符及文本字符所编写的模式,其中有些字符(元字符)不表示字符字面意义,而表示控制或通配的功能,类似于增强版的通配符功能,但与通配符不同,通配符功能是用来处理文件…...
Android UI自动化测试框架—SoloPi简介
1、UI自动化测试简介 软件测试简介 软件测试是伴随着软件开发一同诞生的,随着软件规模大型化,结构复杂化,软件测试也从最初的简单“调试”,发展到当今的自动化测试。 自动化测试是什么呢?自动化测试是把以人为…...

Android Studio Giraffe 正式版下载地址
Android Studio 是 Android 的官方 IDE。它专为 Android 而打造,可以加快您的开发速度,帮助您为每款 Android 设备构建最高品质的应用。 比以往更快地编码和迭代 Android Studio 基于 IntelliJ IDEA 而构建,可以提供较短的编码和运行工作流…...
【C语言】调试技巧
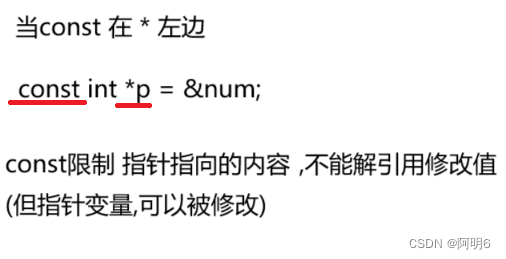
目录 一、什么是bug? 二、调试 1.一般调试的步骤 2.Debug 和 Release 三、调试环境准备 四、调试时要查看的信息 1.查看临时变量的值 2.查看内存信息 3.查看调用堆栈 4.查看反汇编信息 5.查看寄存器 五、练习 六、常见的coding技巧 七、const的作用 八、编程常见…...
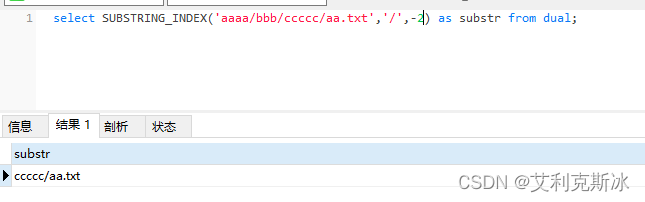
MySQL SUBSTRING_INDEX() 函数的详细介绍
MySQL SUBSTRING_INDEX() 从给定字符串中返回指定数量的分隔符出现之前的子字符串。 当指定数字为正数时从最终分隔符的左侧返回子字符串,当指定数字为负数时从最终分隔符的右侧返回子字符串。 如果指定的次数大于分隔符的出现次数,则返回的子字符串将…...

DazToBlender插件终极指南:如何实现Daz Studio到Blender的无缝资产迁移
DazToBlender插件终极指南:如何实现Daz Studio到Blender的无缝资产迁移 【免费下载链接】DazToBlender Daz to Blender Bridge 项目地址: https://gitcode.com/gh_mirrors/da/DazToBlender 还在为Daz Studio和Blender之间的3D资产转移而头疼吗?&a…...

终极指南:如何快速实现Daz Studio到Blender的无缝资产迁移
终极指南:如何快速实现Daz Studio到Blender的无缝资产迁移 【免费下载链接】DazToBlender Daz to Blender Bridge 项目地址: https://gitcode.com/gh_mirrors/da/DazToBlender 还在为3D角色创作中的软件壁垒而烦恼吗?Daz Studio以其强大的角色创建…...

DCIM存内计算技术:原理、挑战与自动化设计实践
1. 存内计算技术演进与DCIM核心挑战在AI计算架构的发展历程中,存内计算(Computing-in-Memory, CIM)技术正在引发一场深刻的范式变革。传统冯诺依曼架构中,数据需要在处理器和存储器之间频繁搬运,这种"内存墙"…...

Agent_Skills_万千应用_第03篇_PPT 生成 Skill:从资料到可演示幻灯片
Agent Skills 万千应用 第03篇 PPT 生成 Skill:从资料到可演示幻灯片01|场景痛点:PPT 最难的不是做,而是“讲清楚” 你有没有遇到过这种情况? 老板临时说:“明天下午做个 10 分钟汇报。” 你手里有一堆资料…...

Windows使用Powershell自动安装SqlServer2025服务器与SSMS管理工具
下载地址: https://www.microsoft.com/zh-cn/evalcenter/evaluate-sql-server-2025 安装结果: 安装前准备: 1.下载mssql server 2025安装器 2.下载iso镜像 3.下载好SSMS安装程序,并放到iso同目录下...

Windows Defender移除终极指南:如何彻底禁用微软安全组件提升系统性能30%
Windows Defender移除终极指南:如何彻底禁用微软安全组件提升系统性能30% 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcode.…...

终极AMD Ryzen性能调优指南:SMUDebugTool完全掌握手册
终极AMD Ryzen性能调优指南:SMUDebugTool完全掌握手册 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://gi…...

Borderless Gaming终极指南:如何彻底告别Alt+Tab卡顿的游戏窗口无缝切换方案
Borderless Gaming终极指南:如何彻底告别AltTab卡顿的游戏窗口无缝切换方案 【免费下载链接】Borderless-Gaming Play your favorite games in a borderless window; no more time consuming alt-tabs. 项目地址: https://gitcode.com/gh_mirrors/bo/Borderless-…...

127、运动控制中的硬件抽象层设计
运动控制中的硬件抽象层设计 从一次电机“鬼畜”说起 去年调试一个四轴协作机器人,电机在低速运行时突然出现周期性抖动,示波器抓出来一看,电流波形每隔几十毫秒就出现一个毛刺。排查了三天,最后发现是底层驱动库里的定时器中断优先级被某个外设库给改了——硬件抽象层(…...

2026三相温升交直流升流器:现场检修的“移动电源”
干抢修最怕遇到怀疑母线或开关接触不良导致过热的情况。大半夜的,不可能把设备拆下来送回厂里试验。有一次处理一个110kV隔离开关发热缺陷,换完触头,必须马上验证温升合格才能送电。那时候用的老式升流器又笨又重,从车上抬下来接线…...