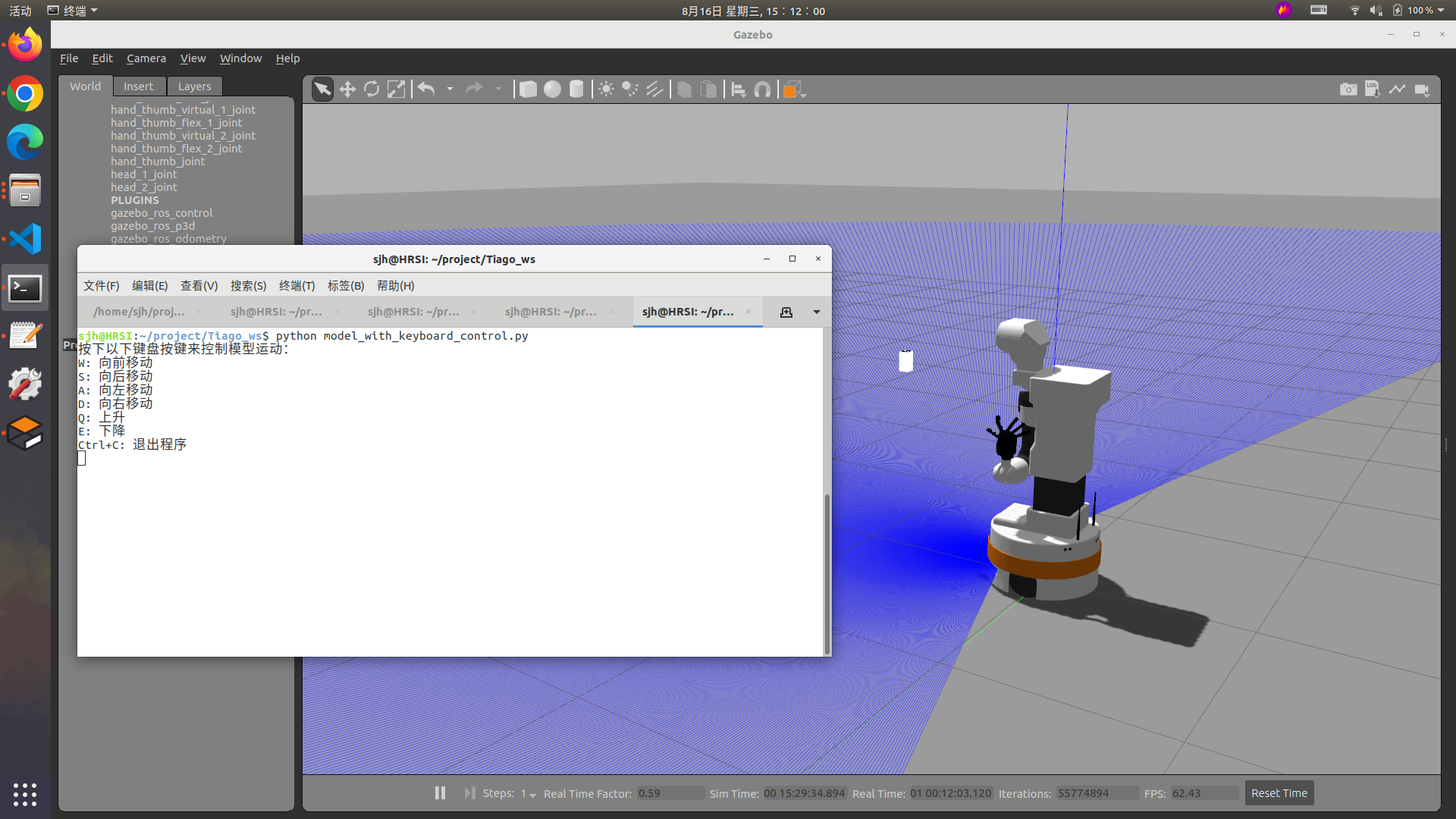
在Gazebo中添加悬浮模型后,利用键盘控制其移动方法
前段时间写了文章,通过修改sdf、urdf模型的方法,在Gazebo中添加悬浮模型方法 / Gazebo中模型如何不因重力下落:在Gazebo中添加悬浮模型方法 / Gazebo中模型如何不因重力下落:修改sdf、urdf模型_sagima_sdu的博客-CSDN博客
今天讲一下如何通过键盘来控制其移动:监听键盘输入并根据按键调整模型的位置,然后通过调用set_model_state函数来更新模型在Gazebo中的状态
程序举例:
首先,我们先通过一个程序,实现在指定的空间坐标生成一个指定的模型
(注意,如果要使用的话,需要修改程序中指定的模型名称和模型的路径)
# -*- coding: utf-8 -*-
#!/usr/bin/env python"""
Author:sagima使用Gazebo仿真环境中生成一个名为"aruco_cubo_hover"的模型
python model.py
程序运行在Python2.7环境下。
"""import os
import rospy
from gazebo_msgs.msg import ModelState
from gazebo_msgs.srv import DeleteModel, SpawnModel
from std_msgs.msg import Header
from geometry_msgs.msg import Pose, Point# 初始化ROS节点
rospy.init_node('spawn_aruco_cubo_hover', anonymous=True)# 定义生成模型的函数
def spawn_aruco_cubo_hover():model_name = "aruco_cubo_hover"model_path = "/home/sjh/project/Tiago_ws/src/pal_gazebo_worlds/models/aruco_cube_hover/aruco_cube_hover.sdf"# 在这里修改目标位置initial_pose = Pose(position=Point(x=0.8, y=0, z=1))# 从文件加载模型with open(model_path, "r") as f:model_xml = f.read()# 调用Gazebo的SpawnModel服务spawn_model = rospy.ServiceProxy('/gazebo/spawn_sdf_model', SpawnModel)resp_sdf = spawn_model(model_name, model_xml, "", initial_pose, "world")if resp_sdf.success:rospy.loginfo("模型 '{}' 生成成功。".format(model_name))else:rospy.logerr("模型 '{}' 生成失败。".format(model_name))# 调用生成模型的函数
if __name__ == '__main__':try:spawn_aruco_cubo_hover()except rospy.ROSInterruptException:pass
上面的程序没有问题的话,就可以为其加入通过键盘控制的功能了
# -*- coding: utf-8 -*-
#!/usr/bin/env python"""
Author:sagima使用Gazebo仿真环境中生成一个名为"aruco_cubo_hover"的模型,并通过键盘控制模型运动
python model_with_keyboard_control.py
程序运行在Python2.7环境下。
"""import os
import rospy
from gazebo_msgs.msg import ModelState
from gazebo_msgs.srv import SetModelState, GetModelState
from std_msgs.msg import Header
from geometry_msgs.msg import Pose, Point
import sys
import select
import tty
import termios# 初始化ROS节点
rospy.init_node('spawn_aruco_cubo_hover', anonymous=True)# 保存终端设置
old_settings = termios.tcgetattr(sys.stdin)
tty.setcbreak(sys.stdin.fileno())# 定义运动速度
move_speed = 0.1# 定义生成模型的函数
def spawn_aruco_cubo_hover(initial_pose):model_name = "aruco_cubo_hover"model_path = "/home/sjh/project/Tiago_ws/src/pal_gazebo_worlds/models/aruco_cube_hover/aruco_cube_hover.sdf"# 从文件加载模型with open(model_path, "r") as f:model_xml = f.read()# 调用Gazebo的SpawnModel服务spawn_model = rospy.ServiceProxy('/gazebo/spawn_sdf_model', SpawnModel)resp_sdf = spawn_model(model_name, model_xml, "", initial_pose, "world")if resp_sdf.success:rospy.loginfo("模型 '{}' 生成成功。".format(model_name))else:rospy.logerr("模型 '{}' 生成失败。".format(model_name))# 定义设置模型状态的函数
def set_model_state(model_name, pose):model_state = ModelState()model_state.model_name = model_namemodel_state.pose = poseset_model_state = rospy.ServiceProxy('/gazebo/set_model_state', SetModelState)set_model_state(model_state)# 中文提示
print("按下以下键盘按键来控制模型运动:")
print("W: 向前移动")
print("S: 向后移动")
print("A: 向左移动")
print("D: 向右移动")
print("Q: 上升")
print("E: 下降")
print("Ctrl+C: 退出程序")try:# 定义初始位置initial_pose = Pose(position=Point(x=0.8, y=0, z=1))# 主循环,持续监听键盘输入并控制模型运动while True:if select.select([sys.stdin], [], [], 0)[0] == [sys.stdin]:key = sys.stdin.read(1)if key == 'w':initial_pose.position.x += move_speedelif key == 's':initial_pose.position.x -= move_speedelif key == 'a':initial_pose.position.y += move_speedelif key == 'd':initial_pose.position.y -= move_speedelif key == 'q':initial_pose.position.z += move_speedelif key == 'e':initial_pose.position.z -= move_speedelif key == '\x03': # Ctrl+Cbreak# 调用设置模型状态的函数set_model_state("aruco_cubo_hover", initial_pose)
except rospy.ROSInterruptException:pass
finally:# 恢复终端设置termios.tcsetattr(sys.stdin, termios.TCSADRAIN, old_settings)
注意,如果要使用的话,需要修改程序中指定的模型名称和模型的路径;同时如果需要修改按键,记得在中文提示中一并修改
相关文章:
在Gazebo中添加悬浮模型后,利用键盘控制其移动方法
前段时间写了文章,通过修改sdf、urdf模型的方法,在Gazebo中添加悬浮模型方法 / Gazebo中模型如何不因重力下落:在Gazebo中添加悬浮模型方法 / Gazebo中模型如何不因重力下落:修改sdf、urdf模型_sagima_sdu的博客-CSDN博客 今天讲…...
 模板方法设计模式)
Java设计模式 (一) 模板方法设计模式
什么是模板方法设计模式? 模板方法设计模式是一种行为型设计模式,它定义了一个算法的骨架,并将一些步骤的具体实现延迟到子类中。模板方法模式可以帮助确保在算法的不同部分中保持一致性,同时也允许子类根据需要进行具体实现。 模板方法模式…...

PHP在线客服系统推荐
在当今数字化时代,企业客户服务的重要性不容忽视。为了提供卓越的客户体验,许多企业正在寻找PHP在线客服系统。这种系统不仅可以满足客户的需求,还能提升企业的形象。本文将深入探讨PHP在线客服系统的一些有趣话题。 理解PHP在线客服系统 PHP…...
(三)行为型模式:3、解释器模式(Interpreter Pattern)(C++示例)
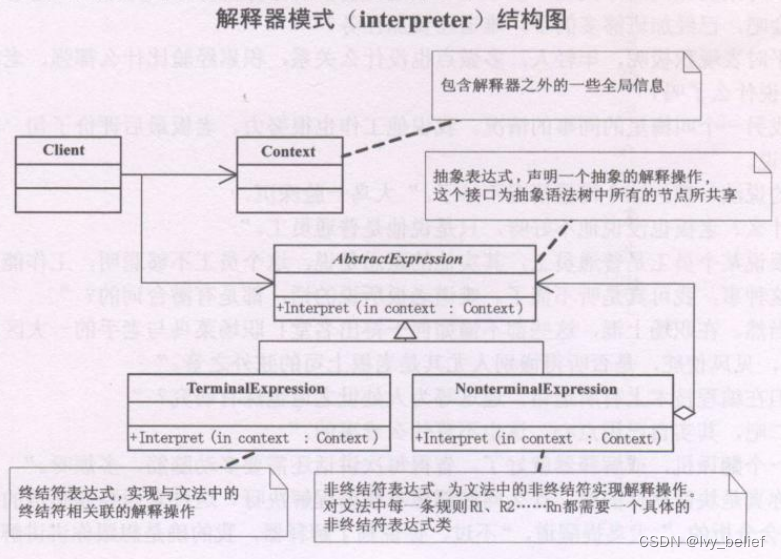
目录 1、解释器模式(Interpreter Pattern)含义 2、解释器模式的UML图学习 3、解释器模式的应用场景 4、解释器模式的优缺点 5、C实现解释器模式的实例 1、解释器模式(Interpreter Pattern)含义 解释器模式(Interp…...

Zookeeper 启动闪退
常见的大概这两种情况 1.找不到zoo.cfg文件 在下载zookeeper后,在 %zookeeper安装目录%/conf 目录下有一个zoo.sample.cfg 文件,把 zoo.sample.cfg 文件改名为 zoo.cfg 再重启zkServer.cmd echo off REM Licensed to the Apache Software Foundation …...
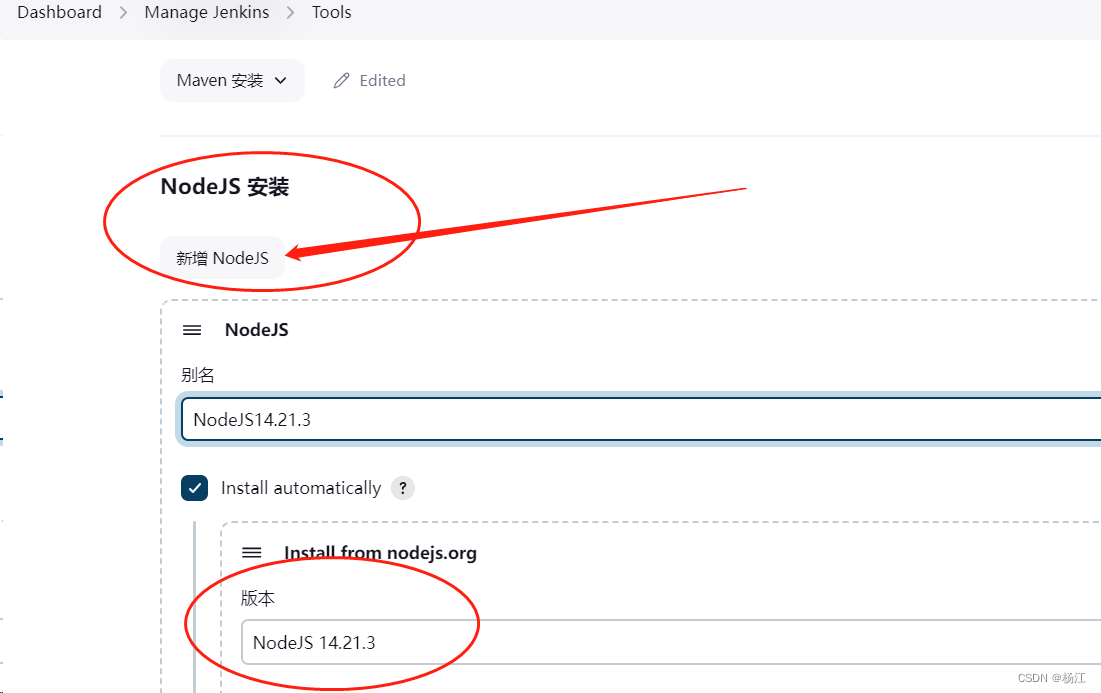
jenkins 安装nodejs 14
参考: jenkins容器安装nodejs-前端问答-PHP中文网...
K8S核心组件etcd详解(上)
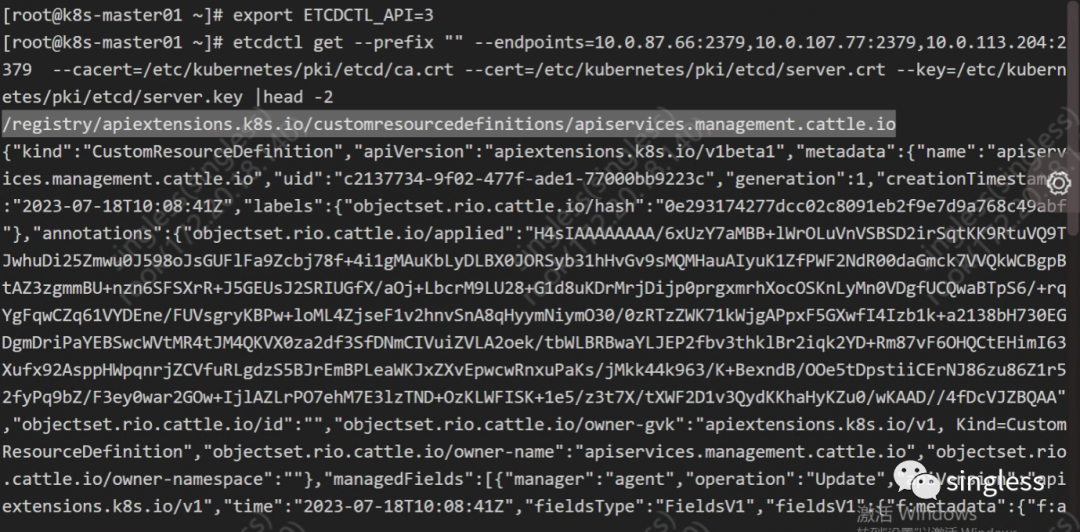
1 介绍 https://etcd.io/docs/v3.5/ etcd是一个高可用的分布式键值存储系统,是CoreOS(现在隶属于Red Hat)公司开发的一个开源项目。它提供了一个简单的接口来存储和检索键值对数据,并使用Raft协议实现了分布式一致性。etcd广泛应用…...
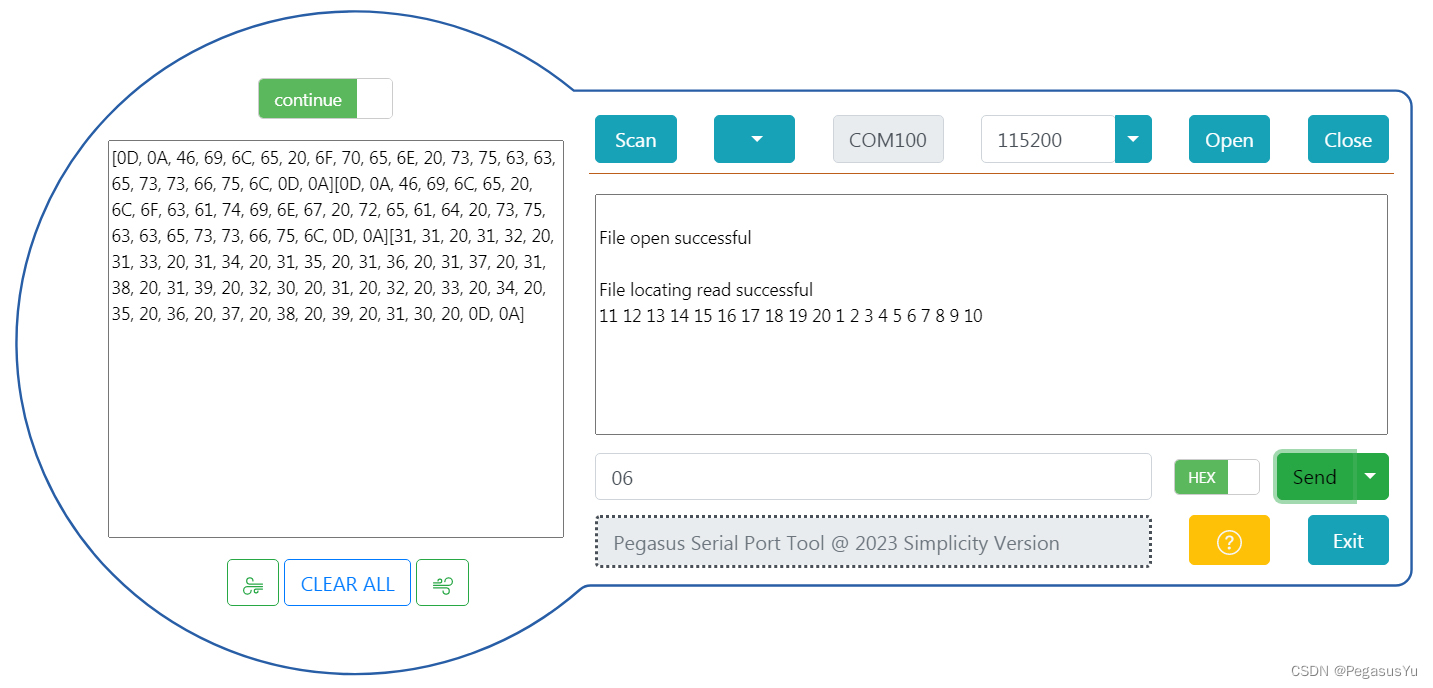
STM32存储左右互搏 I2C总线FATS读写EEPROM ZD24C1MA
STM32存储左右互搏 I2C总线FATS读写EEPROM ZD24C1MA 在较低容量存储领域,EEPROM是常用的存储介质,可以通过直接或者文件操作方式进行读写。不同容量的EEPROM的地址对应位数不同,在发送字节的格式上有所区别。EEPROM是非快速访问存储…...
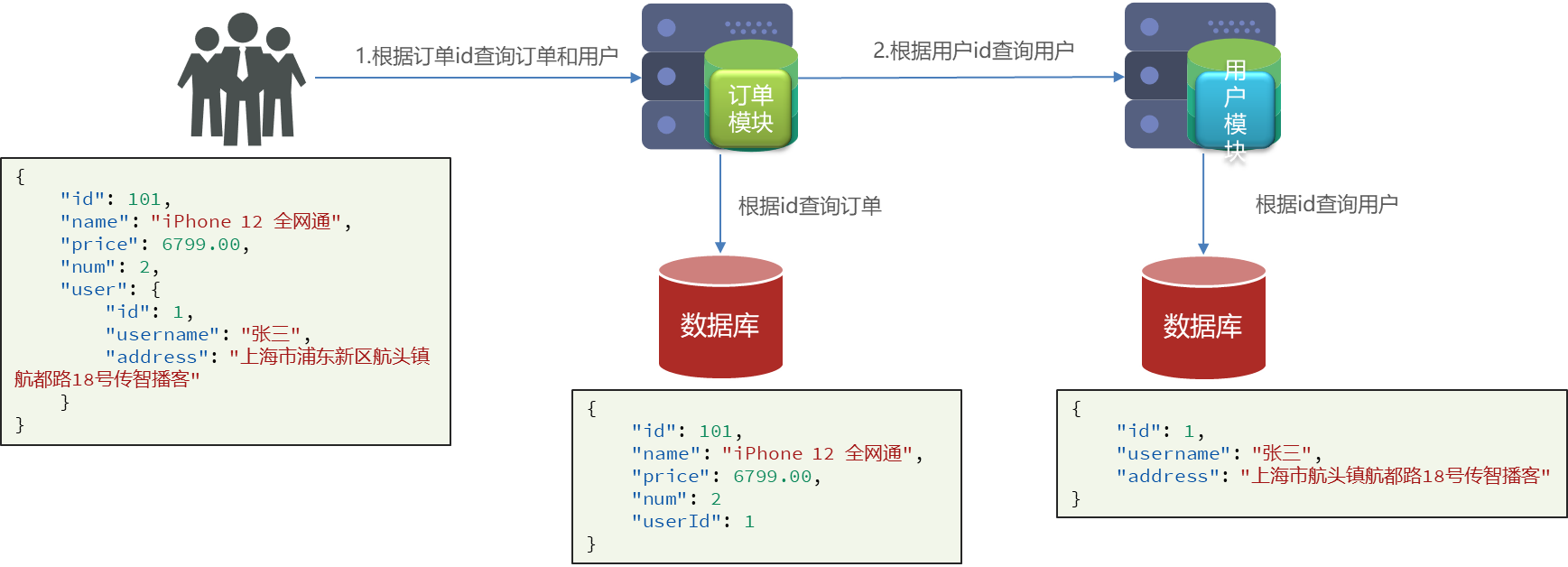
微服务—远程调用(RestTemplate)
在微服务的所有框架中,SpringCloud脱颖而出,它是目前国内使用的最广泛的微服务框架 (官网地址),它集成了各种微服务功能组件,并基于SpringBoot实现了这些组件的自动装配,从而提供了良好的开箱…...
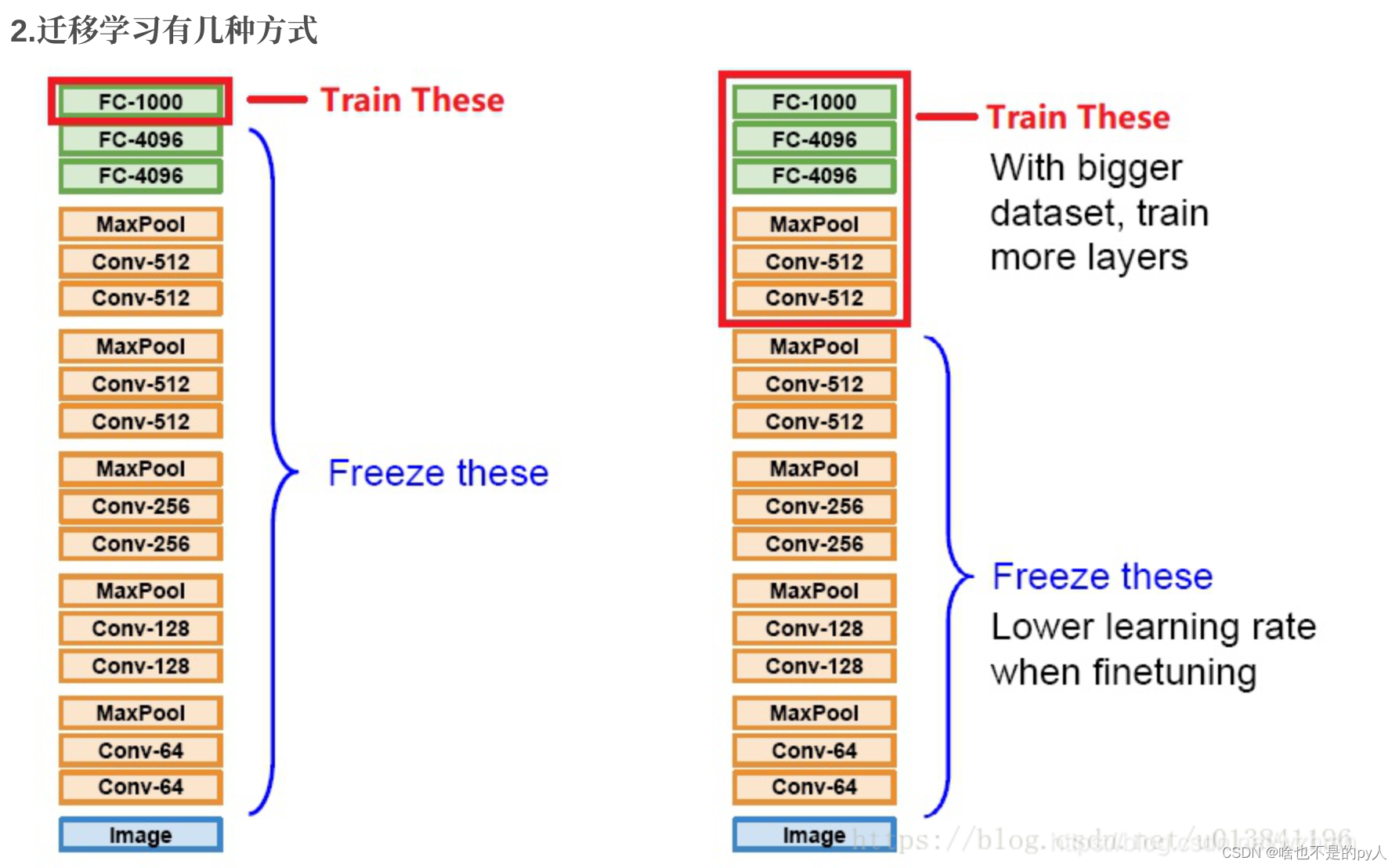
Fine tune简介
目录 Intro Related work Example .1 重新训练 .2 使用新的数据集进行fine tune .3 修改net结构 References 移学习不是一种算法而是一种机器学习思想,应用到深度学习就是微调(Fine-tune)。通过修改预训练网络模型结构(如修改样本类别输出个数),选择性载入预训练网络…...

centos nginx配置ipv4和ipv6的地址都可以访问同一个网站
标题centos nginx配置ipv4和ipv6的地址都可以访问同一个网站 在 Nginx 中配置使 IPv4 和 IPv6 地址都可以访问同一个网站相对简单。只需要确保 Nginx 配置文件正确地配置了监听 IPv4 和 IPv6 地址的监听器即可。 打开你的 Nginx 配置文件,通常位于 /etc/nginx/nginx…...

高教杯数学建模2020C题总结
🧡1. 前言🧡 跟队友花了三天模拟2020C题,现在整理一下一些数据处理的代码,以及在模拟中没有解决的问题。方便以后回溯笔记。 🧡2. 数据处理🧡 2.1 导入数据,并做相关预处理 import pandas a…...
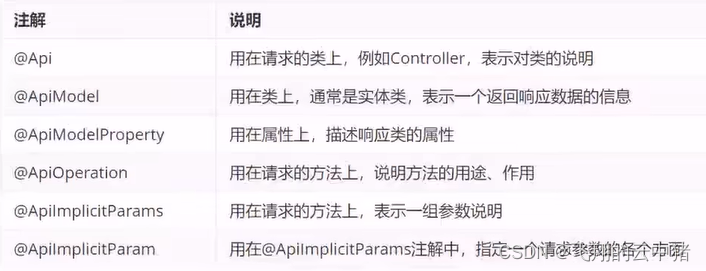
Swagger
目录 简介 使用方式: 常用注解 简介 使用Swagger你只需要按照他的规范去定义接口及接口相关信息再通过Swagger衍生出来的一系列项目和工具,就可以做到生成各种格式的接口文档,以及在线接口调试页面等等。 官网:https://swagger…...

Android 13像Settings一样获取热点和网络共享
一.背景 由于客户定制的Settings里面需要获取到热点和网络共享状态,所以需要实现此功能。 目录 一.背景 二.前提条件 三.调用api 二.前提条件 首先应用肯定要是系统应用,并且导入framework.jar包,具体可以参考: Android 应用自动开启辅助(无障碍)功能并使用辅助(无障碍…...
操作系统搭建相关知识
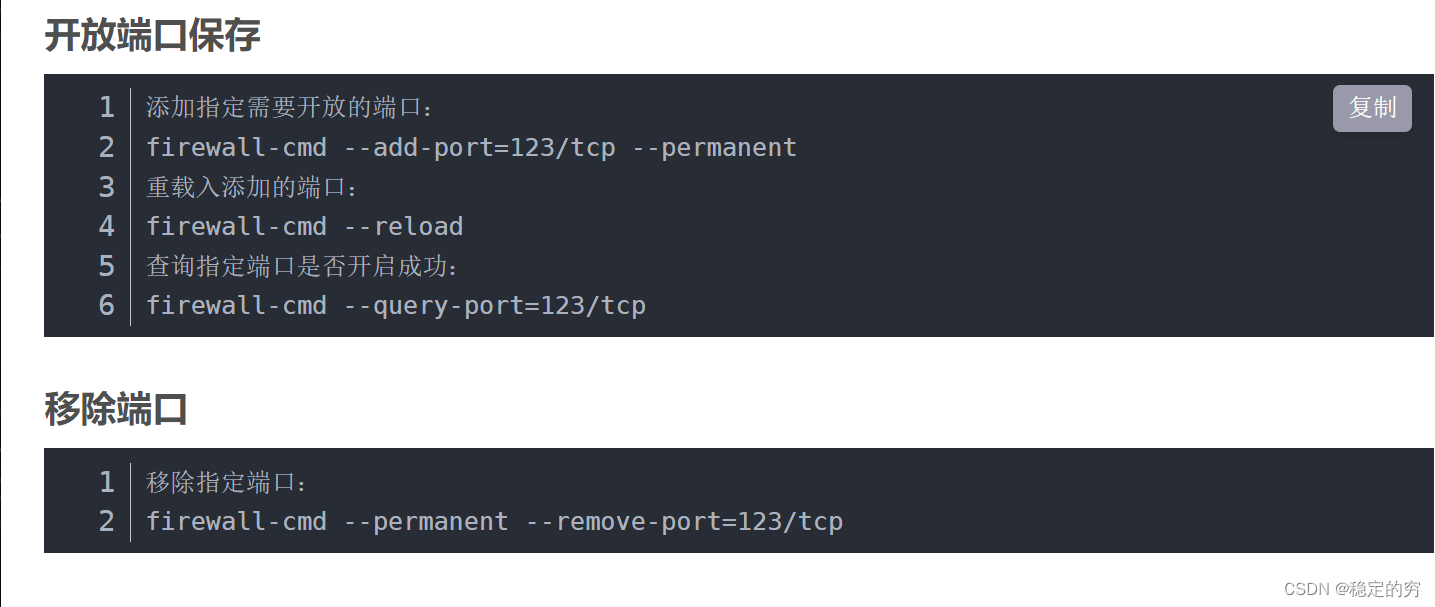
文章目录 系统篇netstat命令systemctl命令Systemd系统资源分类(12类) 网络篇ifconfig命令操作系统配置动态IP脚本dhcp服务的安装与配置防火墙相关知识 操作系统常用配置文件 系统篇 netstat命令 netstat指路 systemctl命令 常用于重启系统的每个服务…...
【校招VIP】前端校招考点之vue底层特性
考点介绍: 大家在面试途中遇到的相对多的问题,也是难点的问题,一般都有vue底层原理。对于只会用但是不懂的小白来说真是太痛苦了,仅仅能说出来 一些 数据劫持,双向数据绑定,虚拟dom树的名词来说远远不够。 …...
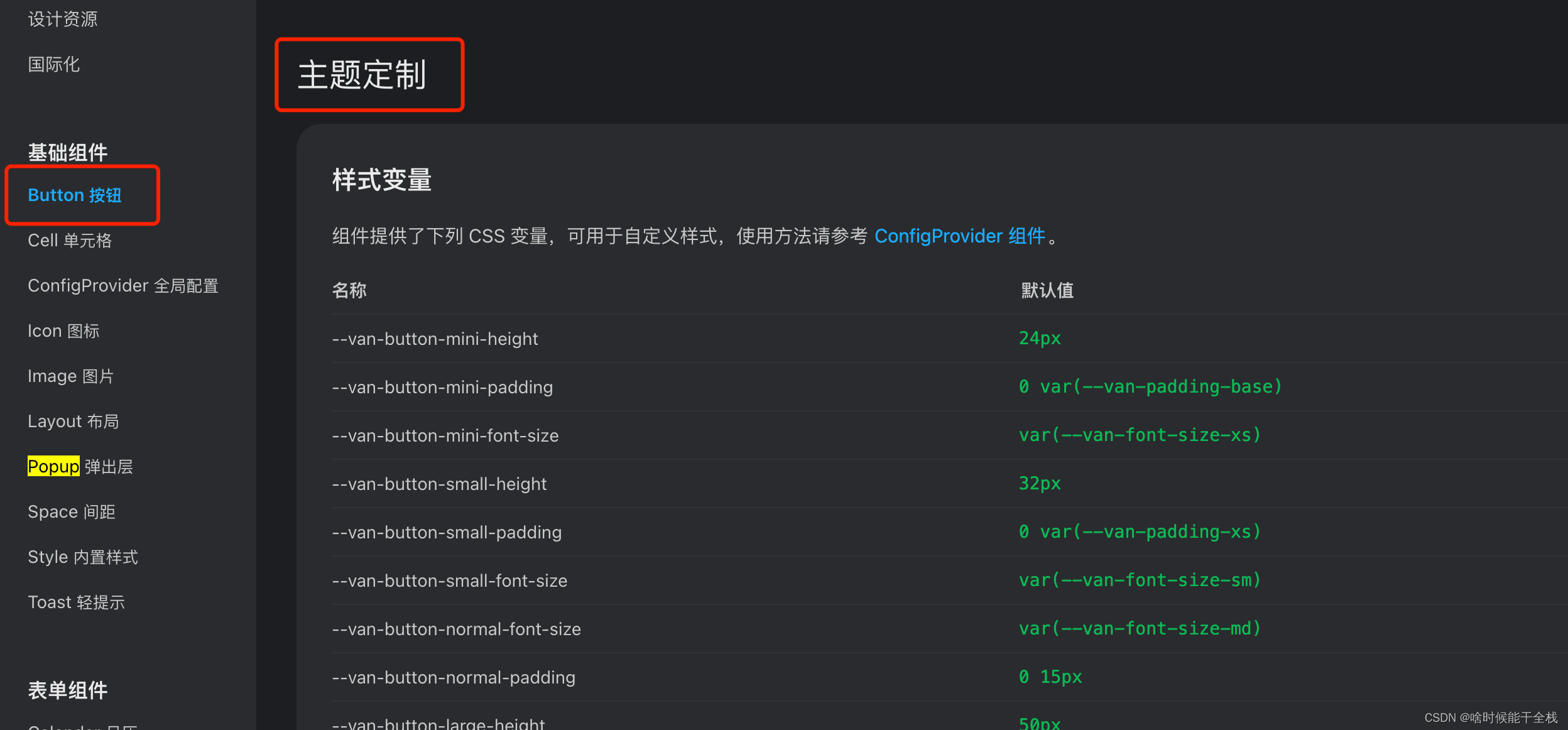
vue3+vite配置vantUI主题
❓在项目中统一配置UI主题色,各个组件配色统一修改 vantUI按需安装 参考vantUI文档 创建vantVar.less文件夹进行样式编写 vantVar.less :root:root{//导航--van-nav-bar-height: 44px;//按钮--van-button-primary-color: #ffffff;--van-button-primary-backgr…...
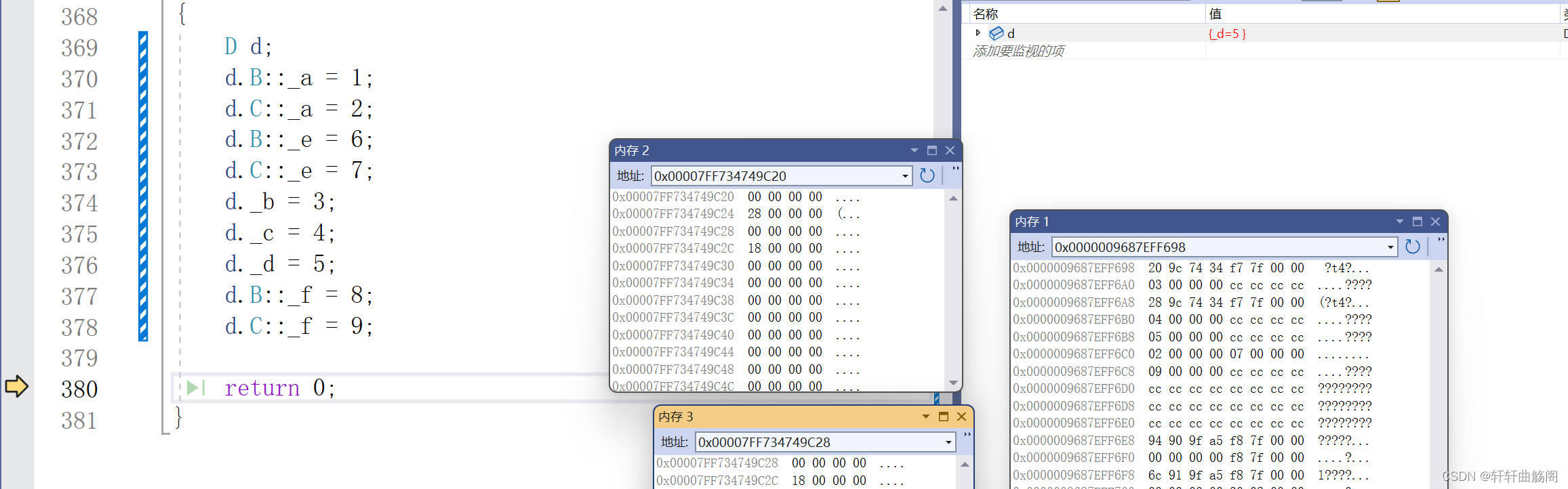
C++基础语法——继承
1.继承是什么? 继承是一种面向对象编程的概念,它允许一个类(称为子类或派生类)从另一个类(称为基类或父类)继承属性和方法。继承使得子类能够使用基类已有的代码,并且可以在此基础上进行扩展或修…...

vim配置之spf13-vim
文章目录 vim配置:spf13-vim什么是spf13-vim安装*nix and os x安装 spf13-vim使用技巧或快捷键spf13的vim默认没有启用剪切板,需要在vimrc中设置 vim配置:spf13-vim 什么是spf13-vim 官网:http://vim.spf13.com/ 它是一个完全跨平台发布,保持vim的感觉…...
Azure如何启用网络观察应用程序
文章目录 基础概念介绍实操 基础概念介绍 Azure中的网络观察应用程序是一种用于监视和诊断Azure网络的工具。它提供了一种集中管理和监控网络流量、连接性和性能的方式。网络观察应用程序能够提供网络流量分析、连接监视、性能监视和故障诊断等功能,用于帮助管理员…...

阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月
阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月 Jianbing Zhu 1^{1}1 1^{1}1 ECT-OS-JiuHuaShan 文明实验室 ORCID: 0009-0006-8591-1891 DOI: 10.5281/zenodo.20373157 Email: ect-os-jiuhuashanzoho…...

基于Arduino与nRF24L01+的无线传感器平台设计与部署指南
1. 项目概述与设计思路如果你和我一样,喜欢在阳台或者小院子里种点蔬菜瓜果,那你肯定也遇到过这样的烦恼:出门几天,心里总惦记着家里的番茄苗是不是缺水了,小温室里的温度会不会太高。传统的温湿度计只能让你在现场读数…...

Claude Agent SDK 从 0 到 1 快速上手教程
Claude Agent SDK 从 0 到 1 快速上手教程 什么是 Claude Agent SDK? Claude Agent SDK 是 Anthropic 官方推出的用于构建 AI 智能体的开发工具包。它基于 Claude Code 构建,让开发者能够以编程方式创建、扩展和定制由 Claude 驱动的应用程序。与简单的聊天机器人不同,基于…...

8款网盘直链下载助手:彻底告别限速烦恼,实现高速下载自由
8款网盘直链下载助手:彻底告别限速烦恼,实现高速下载自由 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移…...

Midjourney V6锐化失控?3步诊断+5组--sref/--stylize协同参数公式,立竿见影修复模糊与锯齿
更多请点击: https://intelliparadigm.com 第一章:Midjourney V6锐化失控的本质归因 Midjourney V6 引入的全新扩散架构与隐式细节增强机制,导致图像生成过程中高频纹理被过度强化,其根本原因并非参数误配,而是模型在…...

如何永久保存微信聊天记录?WeChatMsg数据管理工具完全指南
如何永久保存微信聊天记录?WeChatMsg数据管理工具完全指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/W…...

AhMyth混淆技术:Android RAT的APK反编译保护与代码混淆全指南
AhMyth混淆技术:Android RAT的APK反编译保护与代码混淆全指南 【免费下载链接】AhMyth Cross-Platform Android Remote Administration Tool | The only maintained version of AhMyth on github | A revival of the original repository at https://GitHub.com/AhM…...

Linux 软链接和硬链接详解:ln 命令背后的 inode 原理
Linux 软链接和硬链接详解:ln 命令背后的 inode 原理 1. 前言 Linux 中经常会看到链接文件,例如: /bin -> /usr/bin python -> python3 current -> /opt/app/releases/v2Linux 链接主要有两种: 软链接:symbol…...

终极指南:如何在macOS上使用eqMac专业音频均衡器提升音质体验
终极指南:如何在macOS上使用eqMac专业音频均衡器提升音质体验 【免费下载链接】eqMac macOS System-wide Audio Equalizer & Volume Mixer 🎧 项目地址: https://gitcode.com/gh_mirrors/eq/eqMac 你是否厌倦了macOS系统单调的音频效果&#…...

LaTeX公式秒变Word格式:告别复制粘贴的烦恼,让数学表达更自由
LaTeX公式秒变Word格式:告别复制粘贴的烦恼,让数学表达更自由 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 还在为学术…...