使用opencv4.7.0部署yolov5
yolov5原理和部署原理就不说了,想了解的可以看看这篇部署原理文章
#include <fstream>
#include <sstream>
#include <iostream>
#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>//using namespace cv;
//using namespace dnn;
//using namespace std;
int index = 0;struct Net_config
{float confThreshold; // Confidence thresholdfloat nmsThreshold; // Non-maximum suppression thresholdfloat objThreshold; //Object Confidence thresholdstd::string modelpath;
};int endsWith(std::string s, std::string sub) {return s.rfind(sub) == (s.length() - sub.length()) ? 1 : 0;
}class YOLO
{
public:YOLO(Net_config config);std::tuple<std::vector<cv::Rect>, std::vector<int>> detect(cv::Mat& frame);
private:float* anchors;int num_stride;int inpWidth;int inpHeight;std::vector<std::string> class_names;int num_class;float confThreshold;float nmsThreshold;float objThreshold;const bool keep_ratio = true;cv::dnn::Net net;void drawPred(float conf, int left, int top, int right, int bottom, cv::Mat& frame, int classid);cv::Mat resize_image(cv::Mat srcimg, int *newh, int *neww, int *top, int *left);};YOLO::YOLO(Net_config config)
{this->confThreshold = config.confThreshold;this->nmsThreshold = config.nmsThreshold;this->objThreshold = config.objThreshold;this->net = cv::dnn::readNet(config.modelpath);std::ifstream ifs("D:\\project_prj\\deeplearn\\yolov5\\class.names");std::string line;while (getline(ifs, line)) this->class_names.push_back(line);this->num_class = class_names.size();this->num_stride = 3;this->inpHeight = 640;this->inpWidth = 640;}cv::Mat YOLO::resize_image(cv::Mat srcimg, int *newh, int *neww, int *top, int *left)
{int srch = srcimg.rows, srcw = srcimg.cols;*newh = this->inpHeight;*neww = this->inpWidth;cv::Mat dstimg;if (this->keep_ratio && srch != srcw) {float hw_scale = (float)srch / srcw;if (hw_scale > 1) {*newh = this->inpHeight;*neww = int(this->inpWidth / hw_scale);resize(srcimg, dstimg, cv::Size(*neww, *newh), cv::INTER_AREA);*left = int((this->inpWidth - *neww) * 0.5);copyMakeBorder(dstimg, dstimg, 0, 0, *left, this->inpWidth - *neww - *left, cv::BORDER_CONSTANT, 114);}else {*newh = (int)this->inpHeight * hw_scale;*neww = this->inpWidth;resize(srcimg, dstimg, cv::Size(*neww, *newh), cv::INTER_AREA);*top = (int)(this->inpHeight - *newh) * 0.5;copyMakeBorder(dstimg, dstimg, *top, this->inpHeight - *newh - *top, 0, 0, cv::BORDER_CONSTANT, 114);}}else {resize(srcimg, dstimg, cv::Size(*neww, *newh), cv::INTER_AREA);}return dstimg;
}void YOLO::drawPred(float conf, int left, int top, int right, int bottom, cv::Mat& frame, int classid) // Draw the predicted bounding box
{//Draw a rectangle displaying the bounding boxif(classid==0)cv::rectangle(frame, cv::Point(left, top), cv::Point(right, bottom), cv::Scalar(0, 0, 255), 2);elsecv::rectangle(frame, cv::Point(left, top), cv::Point(right, bottom), cv::Scalar(0, 255, 0), 2);//Get the label for the class name and its confidencestd::string label = cv::format("%.2f", conf);label = this->class_names[classid] + ":" + label;//Display the label at the top of the bounding boxint baseLine;cv::Size labelSize = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);top = std::max(top, labelSize.height);if(classid == 0)//rectangle(frame, Point(left, top - int(1.5 * labelSize.height)), Point(left + int(1.5 * labelSize.width), top + baseLine), Scalar(0, 255, 0), FILLED);cv::putText(frame, label, cv::Point(left, top), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 255), 1);elsecv::putText(frame, label, cv::Point(left, top), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 255, 0), 1);
}std::tuple<std::vector<cv::Rect>, std::vector<int>> YOLO::detect(cv::Mat& frame)
{int newh = 0, neww = 0, padh = 0, padw = 0;cv::Mat dstimg = this->resize_image(frame, &newh, &neww, &padh, &padw);cv::Mat blob = cv::dnn::blobFromImage(dstimg, 1 / 255.0, cv::Size(this->inpWidth, this->inpHeight), cv::Scalar(0, 0, 0), true, false);this->net.setInput(blob);std::vector<cv::Mat> outs;this->net.forward(outs, this->net.getUnconnectedOutLayersNames());int num_proposal = outs[0].size[1];int nout = outs[0].size[2];if (outs[0].dims > 2){outs[0] = outs[0].reshape(0, num_proposal);}/generate proposalsstd::vector<float> confidences;std::vector<cv::Rect> boxes;std::vector<int> classIds;float ratioh = (float)frame.rows / newh, ratiow = (float)frame.cols / neww;int n = 0, q = 0, i = 0, j = 0, row_ind = 0; ///xmin,ymin,xamx,ymax,box_score,class_scorefloat* pdata = (float*)outs[0].data;for (int i = 0; i < 25200 / 7; i++){float cx = pdata[i * 7+0];float cy = pdata[i * 7+1];float w = pdata[i * 7 + 2];float h = pdata[i * 7 + 3];float score = pdata[i * 7 + 4];if (score < this->objThreshold)continue;float class_num1 = pdata[i * 7 + 5];float class_num2 = pdata[i * 7 + 6];int left = int((cx - padw - 0.5 * w) * ratiow);int top = int((cy - padh - 0.5 * h) * ratioh);float max_class_socre = class_num1 > class_num2 ? class_num1 : class_num2;if (class_num1 > class_num2){max_class_socre = class_num1;classIds.push_back(0);}else{max_class_socre = class_num2;classIds.push_back(1);}confidences.push_back(max_class_socre);boxes.push_back(cv::Rect(left, top, (int)(w * ratiow), (int)(h * ratioh)));}// Perform non maximum suppression to eliminate redundant overlapping boxes with// lower confidencesstd::vector<cv::Rect> result_;std::vector<int> class_;std::vector<int> indices;cv::dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);for (size_t i = 0; i < indices.size(); ++i){int idx = indices[i];cv::Rect box = boxes[idx];result_.emplace_back(box);class_.emplace_back(classIds[idx]);this->drawPred(confidences[idx], box.x, box.y,box.x + box.width, box.y + box.height, frame, classIds[idx]);}imwrite("D:\\project_prj\\deeplearn\\yolov5\\result\\" + std::to_string(index++) + ".jpg", frame);//std::cout << "done" << std::endl;//delete pdata;return std::make_tuple(result_, class_);
}int main()
{Net_config yolo_nets = { 0.60, 0.5, 0.60, "D:\\project_prj\\run\\best_detectcircle_1.onnx" };YOLO yolo_model(yolo_nets);//string imgpath = "D:\\20230817-144309.jpg";std::string path = "C:\\datas_samll";std::vector<cv::String> result;cv::glob(path, result);for (auto x : result){std::cout << x << std::endl;cv::Mat srcimg = cv::imread(x);auto result = yolo_model.detect(srcimg);}}相关文章:

使用opencv4.7.0部署yolov5
yolov5原理和部署原理就不说了,想了解的可以看看这篇部署原理文章 #include <fstream> #include <sstream> #include <iostream> #include <opencv2/dnn.hpp> #include <opencv2/imgproc.hpp> #include <opencv2/highgui.hpp>/…...
Python - 协程基本使用详解【demo】
一. 前言 协程(Coroutine)是一种轻量级的线程,也被称为用户级线程或绿色线程。它是一种用户态的上下文切换方式,比内核态的线程切换更为轻量级,能够高效的支持大量并发操作。 2. 使用协程的好处 Python 中的协程是通…...

Android MVVM架构模式,详详详细学习
MVVM(Model-View-ViewModel) 是一种基于数据绑定的架构模式,用于设计和组织应用程序的代码结构。它将应用程序分为三个主要部分:Model(模型)、View(视图)和ViewModel(视…...
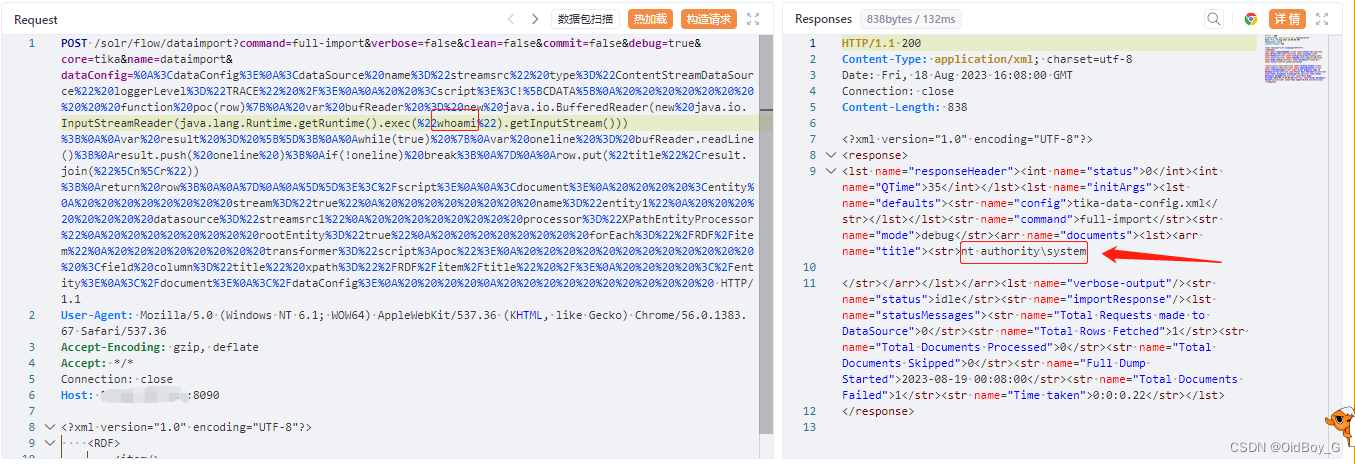
亿赛通电子文档安全管理系统 RCE漏洞复现
0x01 产品简介 亿赛通电子文档安全管理系统(简称:CDG)是一款电子文档安全加密软件,该系统利用驱动层透明加密技术,通过对电子文档的加密保护,防止内部员工泄密和外部人员非法窃取企业核心重要数据资产&…...
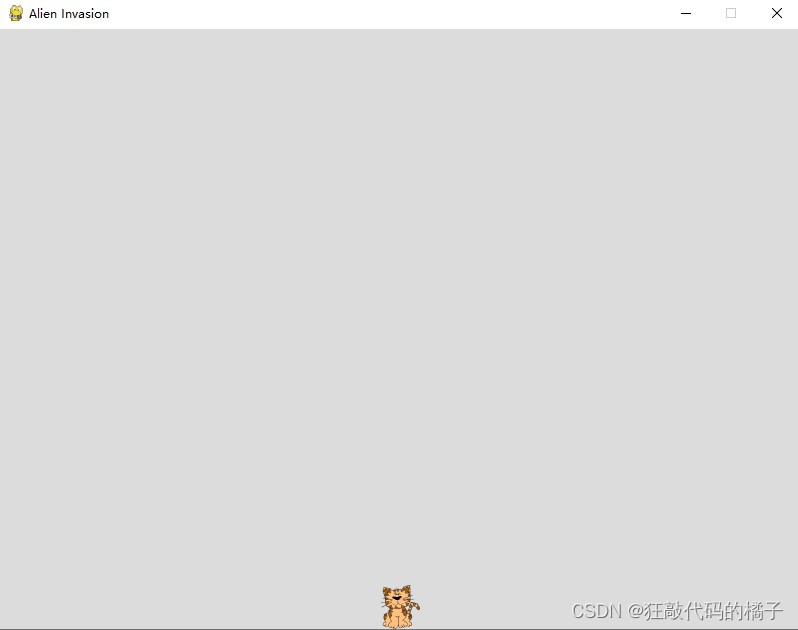
星际争霸之小霸王之小蜜蜂(三)--重构模块
目录 前言 一、为什么要重构模块 二、创建game_functions 三、创建update_screen() 四、修改alien_invasion模块 五、课后思考 总结 前言 前两天我们已经成功创建了窗口,并将小蜜蜂放在窗口的最下方中间位置,本来以为今天将学习控制小蜜蜂,结…...

JS的解析与Js2Py使用
JS的解析与Js2Py使用 JS的解析事件监听器搜索关键字请求关联JS文件 Js2PyJs2Py的简单使用安装Js2Py执行JavaScript代码调用JavaScript函数 Js2Py的应用示例创建JavaScript文件使用JavaScript JS的解析 在一个网站中,登录密码通常是会进行加密操作的,那么…...
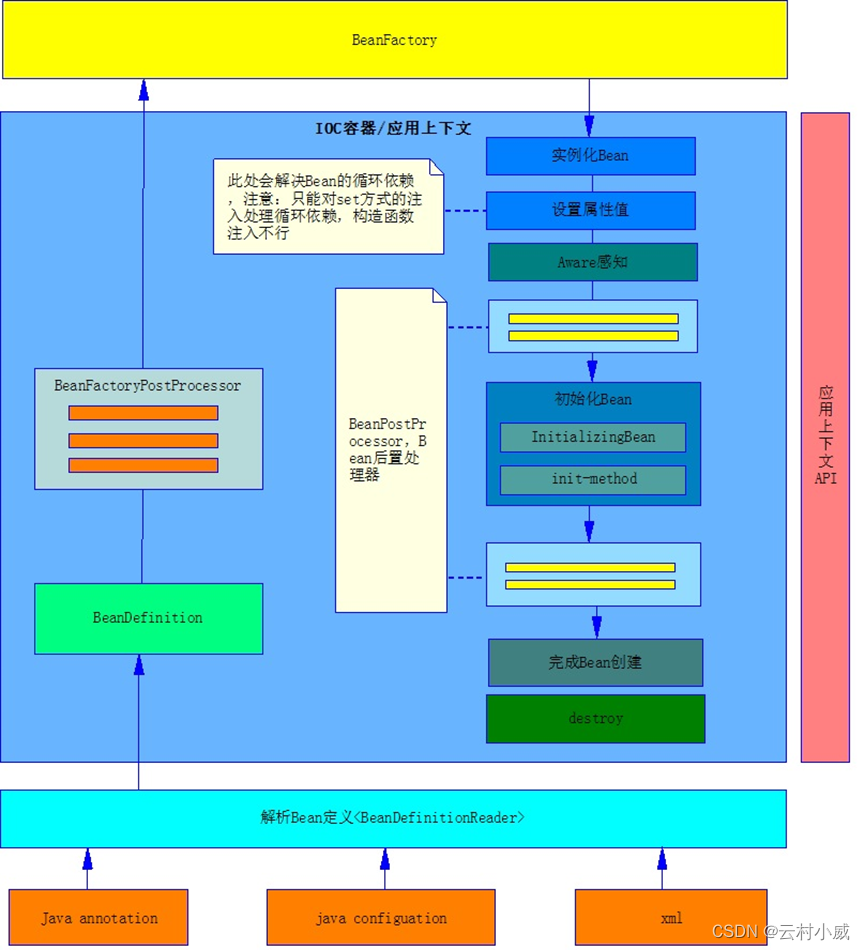
Spring Bean的生命周期总结(包含面试题)
目录 一、Bean的初始化过程 1. 加载Spring Bean 2. 解析Bean的定义 3. Bean属性定义 4. BeanFactoryPostProcessor 扩展接口 5. 实例化Bean对象 6. Aware感知 7. 初始化方法 8. 后置处理 9. destroy 销毁 二、Bean的单例与多例模式 2.1 单例模式(Sin…...
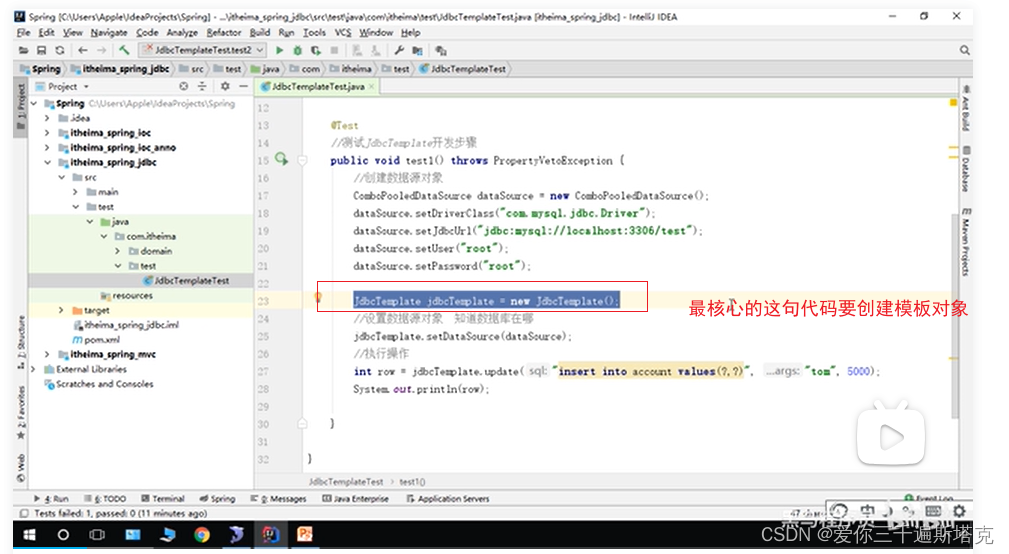
SpringjDBCTemplate_spring25
1、首先导入两个包,里面有模板 2、transtion事务 jDbc操作对象,底层默认的是事务: 3、我们java一般对实体类进行操作。 4、第一步写好坐标。 创建一个Account表 数据修改用update 数据进去了...
设计模式——桥接模式
引用 桥我们大家都熟悉,顾名思义就是用来将河的两岸联系起来的。而此处的桥是用来将两个独立的结构联系起来,而这两个被联系起来的结构可以独立的变化,所有其他的理解只要建立在这个层面上就会比较容易。 基本介绍 桥接模式(Br…...
改进YOLO系列:2.添加ShuffleAttention注意力机制
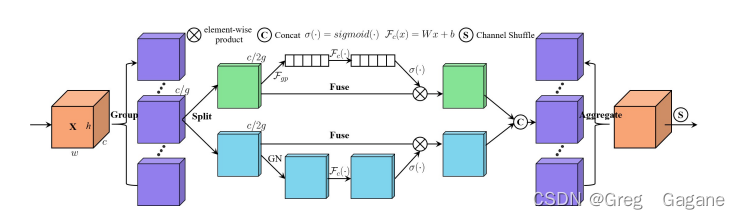
添加ShuffleAttention注意力机制 1. ShuffleAttention注意力机制论文2. ShuffleAttention注意力机制原理3. ShuffleAttention注意力机制的配置3.1common.py配置3.2yolo.py配置3.3yaml文件配置1. ShuffleAttention注意力机制论文 论文题目:SA-NET: SHUFFLE ATTENTION …...

利用Opencv实现人像迁移
前言: Hello大家好,我是Dream。 今天来学习一下如何使用Opencv实现人像迁移,欢迎大家一起参与探讨交流~ 本文目录: 一、实验要求二、实验环境三、实验原理及操作1.照片准备2.图像增强3.实现美颜功能4.背景虚化5.图像二值化处理6.人…...

Lnton羚通算法算力云平台在环境配置时 OpenCV 无法显示图像是什么原因?
问题: cv2.imshow 显示图像时报错,无法显示图像 0%| | 0/1 [00:00<…...
【JavaEE进阶】MyBatis的创建及使用
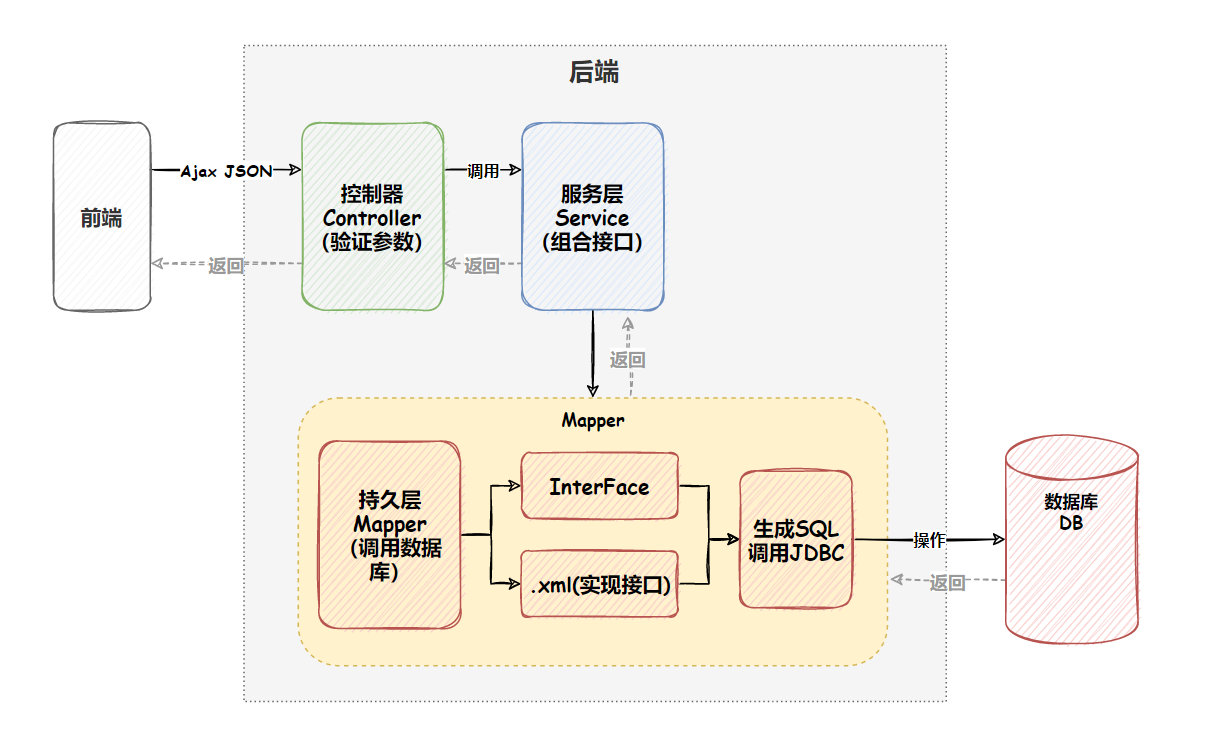
文章目录 一. MyBatis简介二. MyBatis 使用1. 数据库和数据表的创建2. 创建Mybatis项目2.1 添加MyBatis框架支持2.2 设置MyBatis配置信息 3. MyBatis开发流程4. MyBatis查询数据库测试 三. MyBatis 流程1. MyBatis 查询数据库流程2. MyBatis 框架交互流程图 一. MyBatis简介 M…...
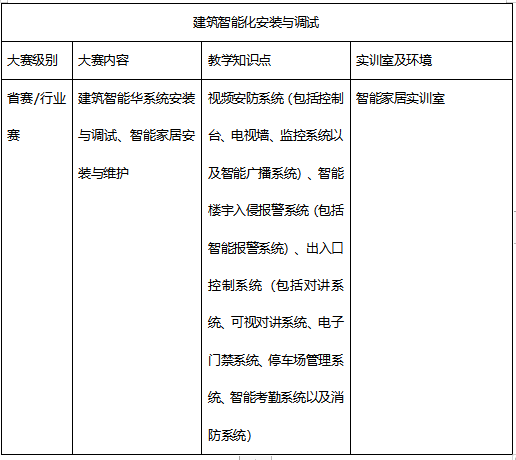
职业学院物联网实训室建设方案
一、概述 1.1专业背景 物联网(Internet of Things)被称为继计算机、互联网之后世界信息产业第三次浪潮,它并非一个全新的技术领域,而是现代信息技术发展到一定阶段后出现的一种聚合性应用与技术提升,是随着传感网、通…...
3 个 ChatGPT 插件您需要立即下载3 ChatGPT Extensions You need to Download Immediately
在16世纪,西班牙探险家皮萨罗带领约200名西班牙士兵和37匹马进入了印加帝国。尽管印加帝国的军队数量达到了数万,其中包括5,000名精锐步兵和3,000名弓箭手,他们装备有大刀、长矛和弓箭等传统武器。但皮萨罗的军队中有100名火枪手,…...
屏蔽socket 实例化时,握手阶段报错信息WebSocket connection to ‘***‘ failed
事情起因是这样的: 我们网站是需要socket链接实行实时推送服务,有恶意竞争对手通过抓包或者断网,获取到了我们的socket链接地址,那么他就可以通过java写一个脚本无限链接这个socket地址。形成dos攻击。使socket服务器资源耗尽&…...
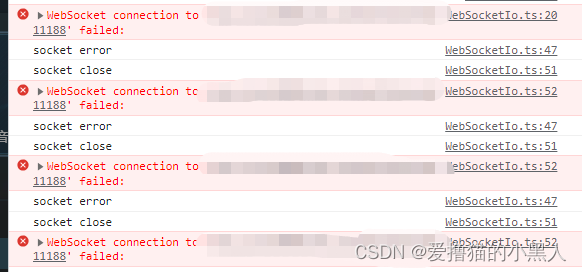
单发多框检测(SSD)【动手学深度学习】
单发多框检测模型主要由一个基础网络块和若干多尺度特征块串联而成。基本网络用于从输入图像中提取特征,可以使用深度卷积神经网络,原论文中选用了在分类层之前阶段的VGG,现在也常用ResNet替代。 我们可以设计基础网络,使它输出的高和宽较大,这样基于该特征图生成的锚框数…...
“RFID与光伏板的完美融合:探索能源科技的新时代!“
随着科技的不断发展,人类创造出了许多令人惊叹的发明。其中,RFID(Radio Frequency Identification)技术的应用在各个领域日益广泛。最近的研究表明,将RFID技术应用于光伏板领域,不仅可以提高光伏板的效率&a…...
)
算法leetcode|71. 简化路径(rust重拳出击)
文章目录 71. 简化路径:样例 1:样例 2:样例 3:样例 4:提示: 分析:题解:rust:go:c:python:java: 71. 简化路径:…...

网络技术Vlan技术STP(第一课)
一 Vlan技术的学习 对命令的增删改查 #### 1)创建vlan[SW1]vlan 2 [2-4094] 创建vlan[SW1]vlan batch 10 20 30 创建多个不连续的vlan[SW1]display vlan 查看vlan信息[SW1]vlan batch 50 to 60创建多个连续的vlan[SW1]vlan2[SW1-vlan2]description caiwu添加描述信…...

IDEA里Artifact选war还是war exploded?一个设置解决Tomcat热部署难题
IDEA中Artifact选择:war与war exploded深度解析与热部署实战 每次修改完JSP页面后都要重启Tomcat?看着进度条缓慢加载,开发效率被硬生生拖慢。这可能是大多数Java Web开发者都经历过的痛苦。问题的根源往往藏在IDEA那个不起眼的Artifact配置选…...

白起、项羽、黄巢杀降时的第三选择
白起、项羽、黄巢,他们都曾站在“杀降”这个决策悬崖上。与其说这是他们个人的暴虐,不如说他们当时都陷入了一个由战争逻辑、资源短缺和恐惧心理共同构筑的绝境。在那个系统里,他们几乎无法做出别的选择。🎲 那场被逼到墙角的困兽…...

开源贡献者如何优雅管理上游补丁:隔离、消毒与自动化工作流实践
1. 项目概述:一个开源贡献者的“清洁”工作流如果你和我一样,长期维护着一些开源项目,同时又基于这些项目进行深度定制和二次开发,那你一定遇到过这个经典难题:如何优雅地管理那些你为上游项目(即原始开源项…...

构建个人技能知识库:从Markdown管理到自动化实践
1. 项目概述:一个技能库的诞生与价值最近在整理个人知识体系时,我一直在思考一个问题:如何将那些零散的、跨领域的“技能点”系统化地管理起来,形成一个可以持续迭代、随时取用的个人工具箱?这不仅仅是写一份简历上的技…...

社区团购系统源码推荐:为什么越来越多团队开始关注 LikeShop 社区团购系统?
如果你最近在研究:社区团购系统源码社区团购平台搭建团长分销系统私域社区团购社区自提系统你会发现一个现象:越来越多人开始提到:“LikeShop社区团购系统”。尤其是在:生鲜团购社区零售社群团购县域电商社区便利店私域卖货这些场…...

终极指南:SpringAll安全框架实战——Shiro与Spring Security权限控制最佳实践
终极指南:SpringAll安全框架实战——Shiro与Spring Security权限控制最佳实践 【免费下载链接】SpringAll 循序渐进,学习Spring Boot、Spring Boot & Shiro、Spring Batch、Spring Cloud、Spring Cloud Alibaba、Spring Security & Spring Secur…...
)
告别软件模拟!用GD32F303硬件I2C驱动AT24C02 EEPROM保姆级教程(附完整代码)
从软件模拟到硬件加速:GD32F303硬件I2C驱动AT24C02全流程解析 当你在嵌入式项目中频繁操作EEPROM时,是否遇到过这样的困扰:软件模拟I2C占用大量CPU资源,时序稳定性受中断影响,传输速率始终无法突破瓶颈?这些…...

OpenFOAM实战:在interFoam中植入多孔介质源项模拟复杂固壁
1. 多孔介质模拟的工程需求与原理 在流体力学仿真中,我们经常遇到需要处理复杂几何边界的情况。传统方法是通过精细的网格划分来精确描述固体边界,但这会带来两个主要问题:一是计算成本急剧上升,二是对于动态变化的边界࿰…...

CDFControl工具详解,搞定云桌面黑屏、卡顿、随机掉线疑难故障
一 前言 在企业Citrix云桌面运维工作中,我们经常遇到一类无明确报错、间歇性复现的疑难故障。常规Windows事件查看器日志干净无报错,常规DDC控制台监控无异常,但终端用户会频繁出现登录黑屏、会话卡顿、虚拟机随机掉线、VDA注册超时等问题。 很多运维人员遇到此类问题只能…...

哔哩下载姬完全指南:从入门到精通的全能B站视频下载方案
哔哩下载姬完全指南:从入门到精通的全能B站视频下载方案 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等&…...