寻路算法小游戏
寻路算法小demo
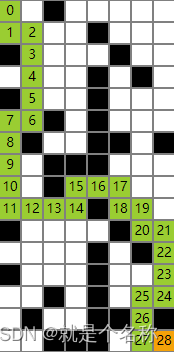
寻路算法有两种,一种是dfs 深度优先算法,一种是
dfs 深度优先算法
深度优先搜索的步骤分为 1.递归下去 2.回溯上来。顾名思义,深度优先,则是以深度为准则,先一条路走到底,直到达到目标。这里称之为递归下去。
否则既没有达到目标又无路可走了,那么则退回到上一步的状态,走其他路。这便是回溯上来。
bfs 广度优先搜索
广度优先搜索较之深度优先搜索之不同在于,深度优先搜索旨在不管有多少条岔路,先一条路走到底,不成功就返回上一个路口然后就选择下一条岔路,而广度优先搜索旨在面临一个路口时,把所有的岔路口都记下来,然后选择其中一个进入,然后将它的分路情况记录下来,然后再返回来进入另外一个岔路,并重复这样的操作。
数据结构上的运用
DFS用递归的形式,用到了栈结构,先进后出。
BFS选取状态用队列的形式,先进先出。
<html><head><title>寻路算法</title>
</head><body><div class="body"><div class="body-content1"><div class="dfs-title">寻路算法</div><div id="dfs-content" class="dfs-cell"></div><div id="btn-list"><div id="btn-start-dfs" class="btn-start">dfs</div><div id="btn-start-bfs" class="btn-start">bfs</div><div id="btn-reset">重置</div></div></div><div class="body-content2"><div class="dfs-title">.</div><div class="start-point point">开始坐标:<input id="start-point-x" type="number" placeholder="行" /><input id="start-point-y" type="number" placeholder="列" /></div><div class="target-point point">终点坐标:<input id="target-point-x" type="number" placeholder="行" /><input id="target-point-y" type="number" placeholder="列" /></div></div></div>
</body>
<script>let count = 0; //步数计数//迷宫地图let map = [[0, 0, 1, 0, 0, 0, 0, 0],[0, 0, 0, 0, 1, 0, 0, 0],[1, 0, 0, 0, 0, 1, 0, 0],[0, 0, 0, 0, 1, 0, 1, 0],[1, 0, 0, 0, 1, 0, 0, 0],[0, 0, 1, 0, 1, 0, 0, 0],[0, 1, 0, 0, 1, 1, 0, 1],[0, 0, 1, 1, 1, 0, 0, 0],[0, 0, 1, 0, 0, 0, 0, 0],[0, 0, 0, 0, 1, 0, 0, 0],[1, 0, 0, 0, 0, 1, 0, 0],[0, 0, 0, 0, 1, 0, 1, 0],[1, 0, 0, 0, 1, 0, 0, 0],[0, 0, 1, 0, 1, 0, 0, 0],[0, 1, 0, 0, 1, 1, 0, 1],[0, 0, 1, 1, 1, 0, 0, 0],];let cellSize = 20; //px单元格大小let startX = 0, //开始坐标startY = 0;let targetX = 15, //结束坐标targetY = 7;let canFind = false;//遍历方向let dx = [0, 1, 0, -1],dy = [1, 0, -1, 0];let flag = new Array(map.length); //dfs标记走过的路径for (let i = 0; i < flag.length; i++) {flag[i] = new Array(map[i].length).fill(false);}//能否到达let findFlag = false;let step = new Array(map.length); //bfs标记走过的路径for (let i = 0; i < step.length; i++) {step[i] = new Array(map[i].length).fill(Infinity);}//单元格点击事件function cellClick(e) {let wFlag = 0;let classList = [...e.classList];if (classList.includes("now-in")) return;if (classList.includes("wall")) {e.classList.remove("wall");e.classList.add("space");} else if (classList.includes("space")) {e.classList.remove("space");e.classList.add("wall");wFlag = 1;}let id = e.id.split("-");let x = id[2],y = id[3];map[x][y] = wFlag;// console.log(map[x][y], x, y);}//初始化页面function init() {initPage();initData();}function initData() {const startPointX = document.getElementById("start-point-x");const startPointY = document.getElementById("start-point-y");const targetPointX = document.getElementById("target-point-x");const targetPointY = document.getElementById("target-point-y");startPointX.value = startX;startPointY.value = startY;targetPointX.value = targetX;targetPointY.value = targetY;startPointX.addEventListener("change", (e) => {if (e.target.value < 0 ||e.target.value >= map.length ||map[e.target.value][startY] == 1) {alert("非法坐标,请重新输入");startPointX.value = startX;return;}startX = parseInt(e.target.value);initPage();});startPointY.addEventListener("change", (e) => {if (e.target.value < 0 ||e.target.value >= map[0].length ||map[startX][e.target.value] == 1) {alert("非法坐标,请重新输入");startPointY.value = startY;return;}startY = parseInt(e.target.value);initPage();});targetPointX.addEventListener("change", (e) => {if (e.target.value < 0 ||e.target.value >= map.length ||map[e.target.value][targetY] == 1) {alert("非法坐标,请重新输入");targetPointX.value = targetX;return;}targetX = parseInt(e.target.value);initPage();});targetPointY.addEventListener("change", (e) => {if (e.target.value < 0 ||e.target.value >= map[0].length ||map[targetX][e.target.value] == 1) {alert("非法坐标,请重新输入");targetPointY.value = targetY;return;}targetY = parseInt(e.target.value);initPage();});}function initPage() {let innerHtml = ``;count = 0;findFlag = false;for (let i = 0; i < map.length; i++) {for (let j = 0; j < map[i].length; j++) {flag[i][j] = false;innerHtml += `<div id="${"dfs-id-" + i + "-" + j}" class="${map[i][j] == 0 ? "space" : "wall"} cell" style="width:${cellSize}px;height:${cellSize}px;" click="cellClick"></div>`;}}let dfsContent = document.getElementById("dfs-content");dfsContent.style.width = map[0].length * (cellSize + 2) + "px";dfsContent.innerHTML = innerHtml;let startCell = document.getElementById("dfs-id-" + startX + "-" + startY);startCell.classList.add("now-in");let targetCell = document.getElementById("dfs-id-" + targetX + "-" + targetY);targetCell.classList.add("target-in");let cell = document.getElementsByClassName("cell");for (let i = 0; i < cell.length; i++) {cell[i].addEventListener("click", () => {cellClick(cell[i]);});}}function dfs(x, y) {const dx = [1, 0, -1, 0],dy = [0, 1, 0, -1];if (x < 0 || y < 0 || x >= map.length || y >= map[0].length) return;if (map[x][y] == 1 || flag[x][y] || findFlag) return;let startCell = document.getElementById("dfs-id-" + x + "-" + y);startCell.classList.add("now-in");if (x == targetX && y == targetY) {findFlag = true;startCell.innerHTML = `<div style="font-size:small;text-align: center;">${count}</div>`;canFind = true;return;}for (let i = 0; i < 4 && !findFlag; i++) {flag[x][y] = true;startCell.innerHTML = `<div style="font-size:small;text-align: center;">${count}</div>`;count++;startCell.classList.add("pass");startCell.classList.remove("now-in");if (!findFlag) dfs(x + dx[i], y + dy[i]);if (!findFlag) flag[x][y] = false;if (!findFlag) startCell.innerHTML = "";if (!findFlag) count--;if (!findFlag) startCell.classList.remove("pass");}}function bfs() {let quene = [[startX, startY]];step[startX][startY] = 0;// console.log("开始bfs");let res = [];flag[startX][startY] = true;while (quene.length) {let p = quene.shift();res.push(p);let x = p[0],y = p[1];if (x == targetX && y == targetY) break;let f = false;for (let i = 0; i < 4; i++) {let nx = x + dx[i],ny = y + dy[i];if (nx < 0 || nx >= map.length || ny >= map[0].length || ny < 0) {continue;}if (map[nx][ny] == 1 || flag[nx][ny] == true) {continue;}flag[nx][ny] = true;step[nx][ny] = step[x][y] + 1;quene.push([nx, ny]);if (nx == targetX && ny == targetY) {f = true;canFind = true;break;}}if (f) break;}if (canFind) bfsDrawRoad();}//绘制路线function bfsDrawRoad() {let road = [[targetX, targetY]];while (road[0][0] != startX || road[0][1] != startY) {let x = road[0][0],y = road[0][1];for (let i = 0; i < 4; i++) {let nx = x + dx[i],ny = y + dy[i];if (nx < 0 || ny < 0 || nx >= step.length || ny >= step[0].length)continue;if (step[x][y] == step[nx][ny] + 1) {road.unshift([nx, ny]);break;}}}for (let i = 0; i < road.length; i++) {let startCell = document.getElementById("dfs-id-" + road[i][0] + "-" + road[i][1]);if (i != road.length - 1) {startCell.classList.add("pass");} else {startCell.classList.add("now-in");}startCell.innerHTML = `<div style="font-size:small;text-align: center;">${i}</div>`;}}//页面初始化init();//开始dfslet startBtnDfs = document.getElementById("btn-start-dfs");startBtnDfs.addEventListener("click", () => {canFind = false;init();dfs(startX, startY);// console.log(canFind);if (!canFind) alert("无法达到");});//开始bfslet startBtnBfs = document.getElementById("btn-start-bfs");startBtnBfs.addEventListener("click", () => {canFind = false;init();bfs();// console.log(canFind);if (!canFind) alert("无法达到");});//重置页面let resetBtn = document.getElementById("btn-reset");resetBtn.addEventListener("click", () => {init();});
</script>
<style>.body {display: flex;margin: auto;}.body-content1 {flex: 1;}.body-content2 {flex: 1;}.point {margin-top: 1rem;}.dfs-cell {display: flex;flex-wrap: wrap;margin: auto;}.dfs-cell>.cell {border: 1px solid gray;cursor: pointer;}.dfs-cell>.wall {background-color: black;}.now-in {background-color: yellow;}.target-in {background-color: rgb(245, 162, 9);}.pass {background-color: yellowgreen;}.dfs-title {text-align: center;margin: 2rem;}#btn-list {display: flex;justify-content: space-between;width: 20rem;margin: auto;}.btn-start {padding: 1rem;margin: auto;margin-top: 2rem;text-align: center;background-color: violet;width: 2rem;cursor: pointer;}#btn-reset {padding: 1rem;margin: auto;margin-top: 2rem;text-align: center;background-color: violet;width: 2rem;cursor: pointer;}
</style></html>
相关文章:
寻路算法小游戏
寻路算法小demo 寻路算法有两种,一种是dfs 深度优先算法,一种是 dfs 深度优先算法 深度优先搜索的步骤分为 1.递归下去 2.回溯上来。顾名思义,深度优先,则是以深度为准则,先一条路走到底,直到达到目标。这…...
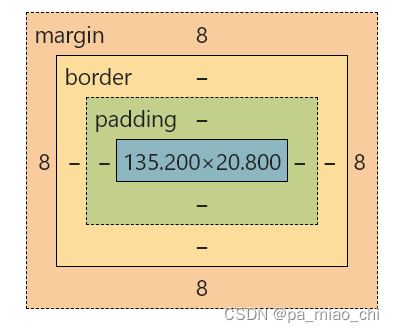
CSS基础 知识点总结
一.CSS简介 1.1 CSS简介 ① CSS指的是层叠样式表,用来控制网页外观的一门技术 ② CSS发展至今,经历过CSS1.0 CSS2.0 CSS2.1 CSS3.0这几个版本,CSS3.0是CSS最新版本 1.2 CSS引入方式 ① 在一个页面引入CSS,共有三种方式 外部…...
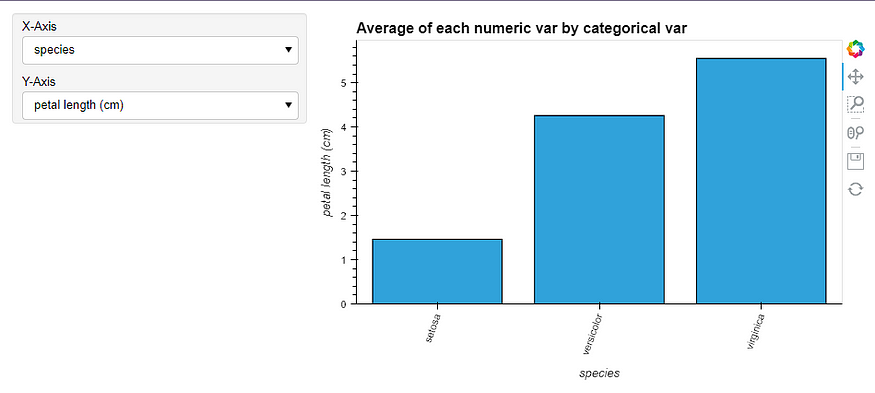
自动执行探索性数据分析 (EDA),更快、更轻松地理解数据
一、说明 EDA是 exploratory data analysis (探索性数据分析 )的缩写。所谓EDA就是在数据分析之前需要对数据进行以此系统性研判,在这个研判后,得到基本的数据先验知识,在这个基础上进行数据分析。本文将在R语言和python语言的探索性处理。 摄…...

【自定义系统服务】【android13】添加自定义java系统服务
背景 在平时的业务开发中,我们往往需要开发自定义的系统服务来处理自己特殊的需求,这里介绍的是添加自定义的Java系统服务,可以在系统App中直接调用 定义aidl Binder默认可以传输基本类型的数据,如果要传递类对象,则这个类需要实现序列化。我们先定义一个序列化的自定义…...
)
【Sklearn】基于随机梯度下降算法的数据分类预测(Excel可直接替换数据)
【Sklearn】基于随机梯度下降算法的数据分类预测(Excel可直接替换数据) 1.模型原理2.模型参数3.文件结构4.Excel数据5.下载地址6.完整代码7.运行结果1.模型原理 随机梯度下降(Stochastic Gradient Descent,SGD)是一种优化算法,用于训练模型的参数以最小化损失函数。在分…...
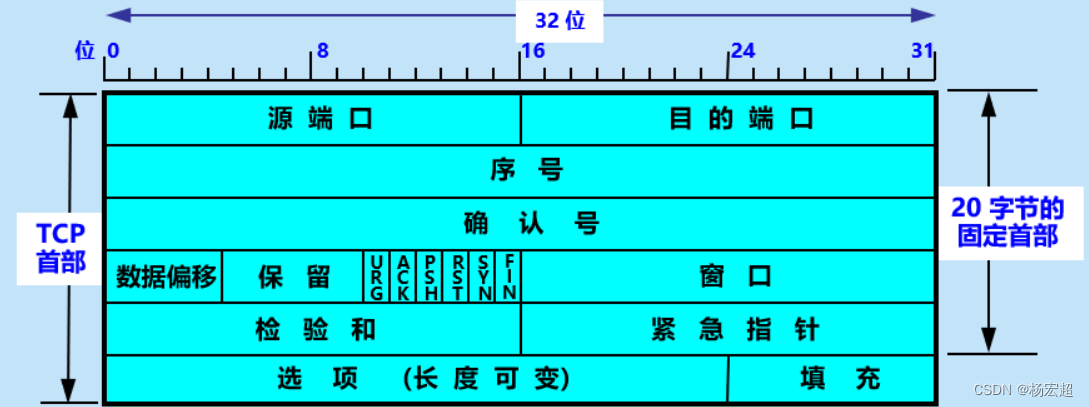
44、TCP报文(二)
接上节内容,本节我们继续TCP报文首部字段含义的学习。上节为止我们学习到“数据偏移”和“保留”字段。接下来我们学习后面的一些字段(暂不包含“检验和”的计算方法和选项字段)。 TCP首部结构(续) “数据偏移”和“保…...
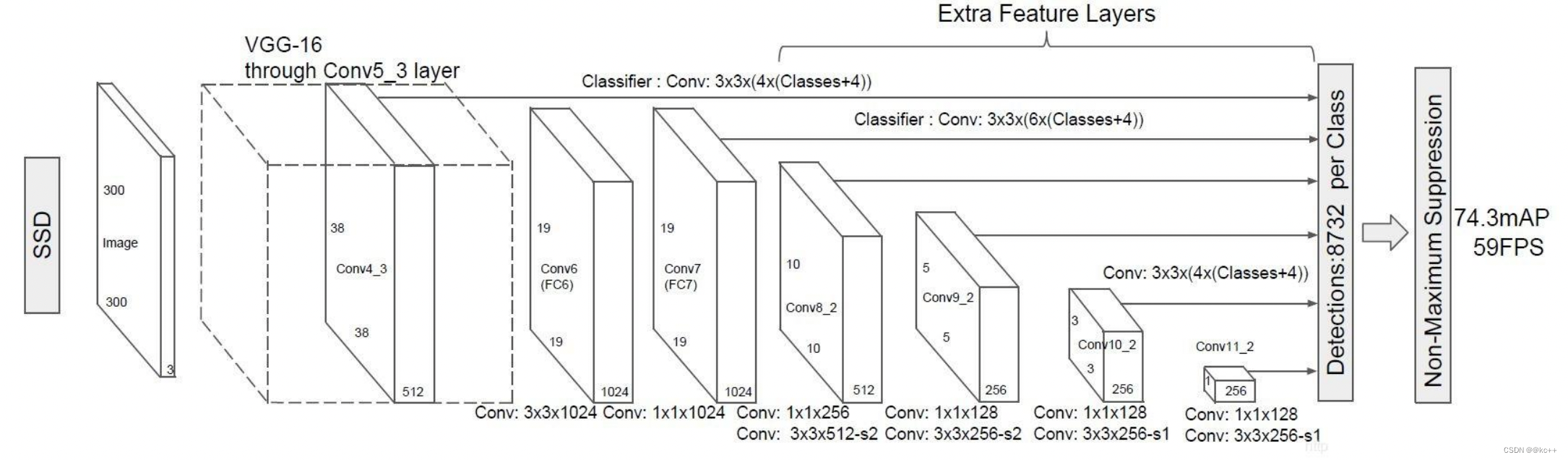
目标检测(Object Detection)
文章目录 1. 目标检测1.1 目标检测简要概述及名词解释1.2 IOU1.3 TP TN FP FN1.4 precision(精确度)和recall(召回率) 2. 边框回归Bounding-Box regression3. Faster R-CNN3.1 Faster-RCNN:conv layer3.2 Faster-RCNN&…...
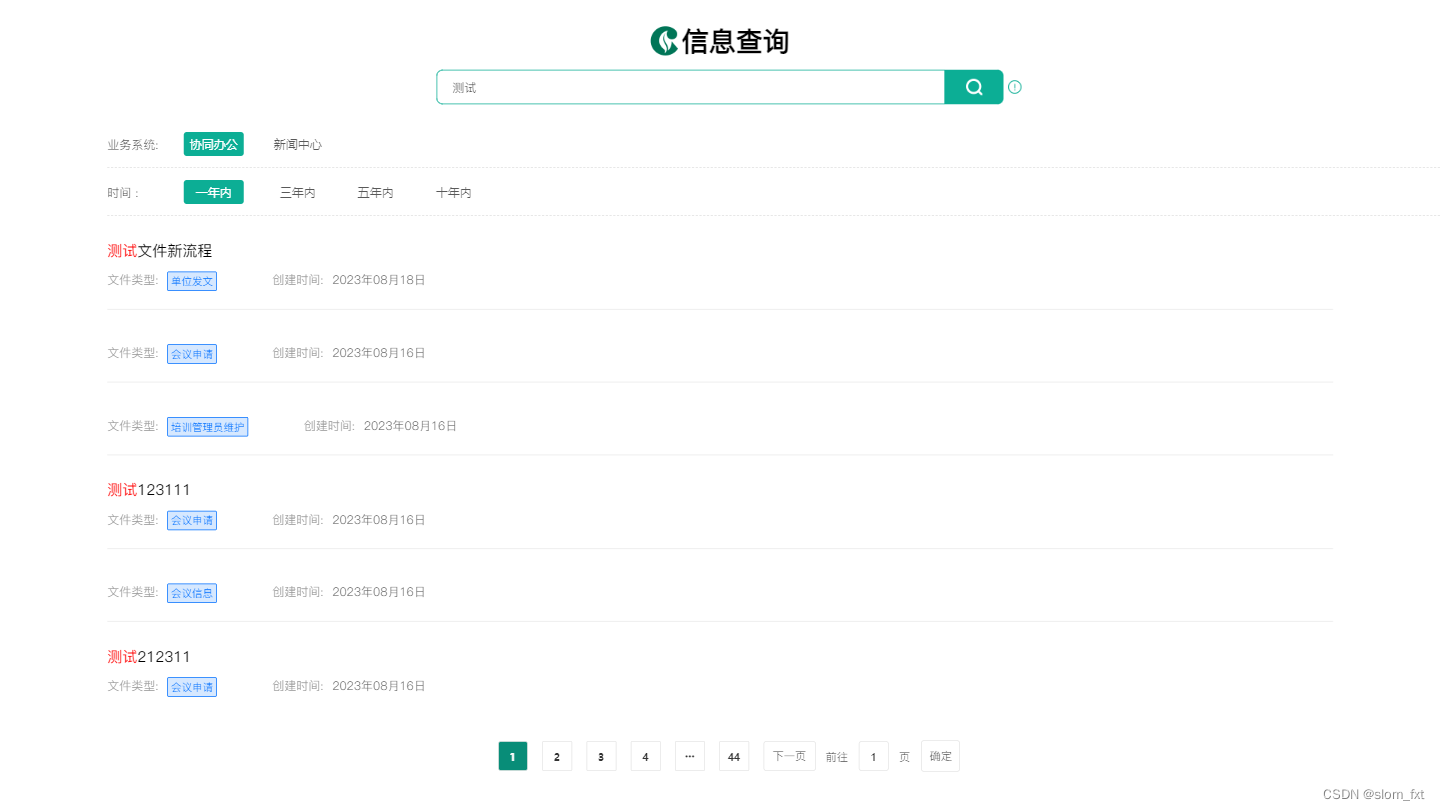
vue中实现文字检索时候将搜索内容标红
实现结果 html: <div class"searchBox"><span class"bt">标  题</span><div class"search"><div class"shuru"><!-- <span class"title">生产经营<…...

PCL protocol composition logic
PCL 协议组合逻辑 一 主体(principal)和线程(thread)的区分 1.主体:指 **协议的参与者,用X^来表示。**每个主体可以扮演一个或多个角色,如 InitCR和RespCR ; 2.线程:主…...
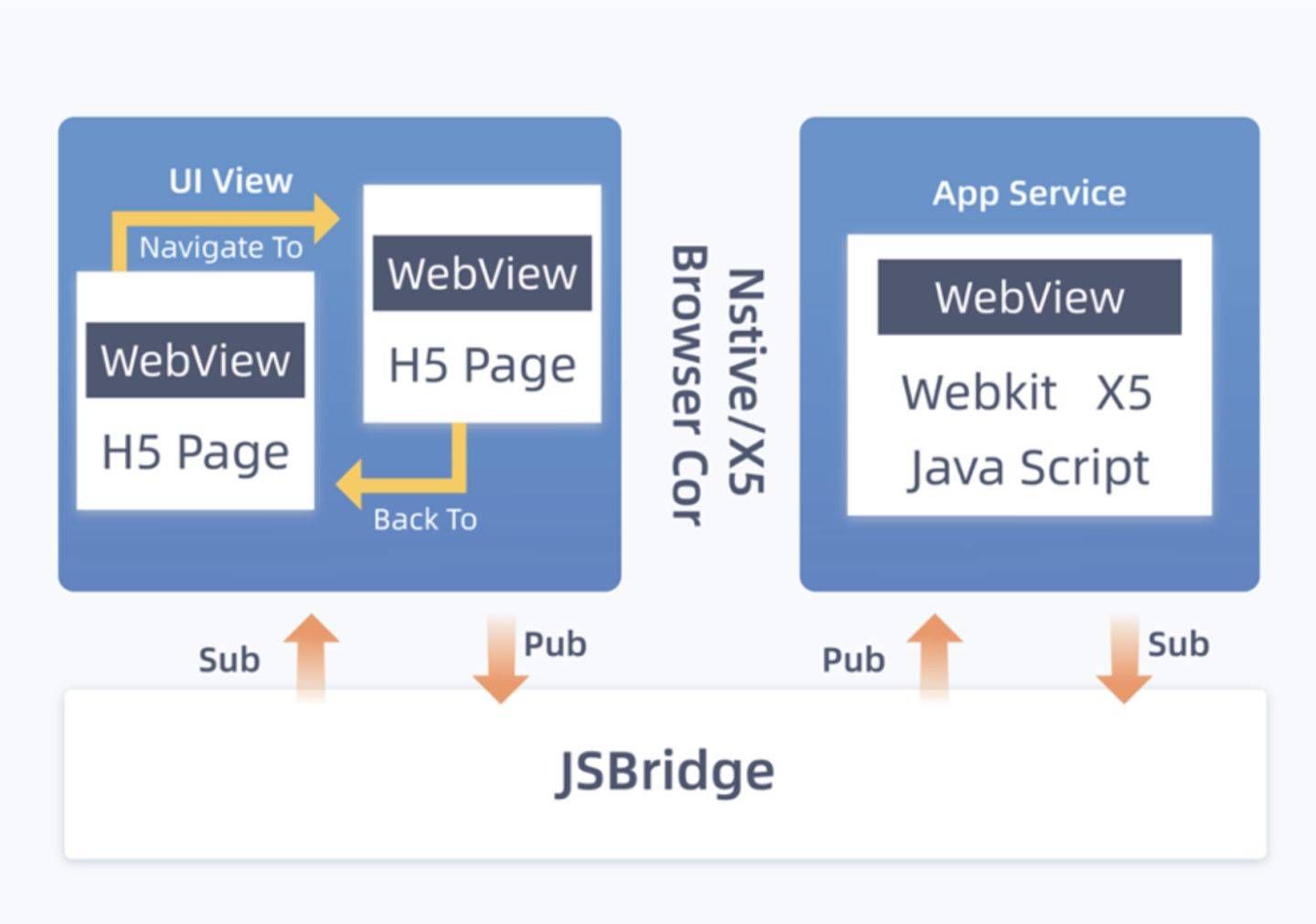
聊聊看React和Vue的区别
Vue 更适合小项目,React 更适合大公司大项目; Vue 的学习成本较低,很容易上手,但项目质量不能保证...... 真的是这样吗?借助本篇文章,我们来从一些方面的比较来客观的去看这个问题。 论文档的丰富性 从两个…...
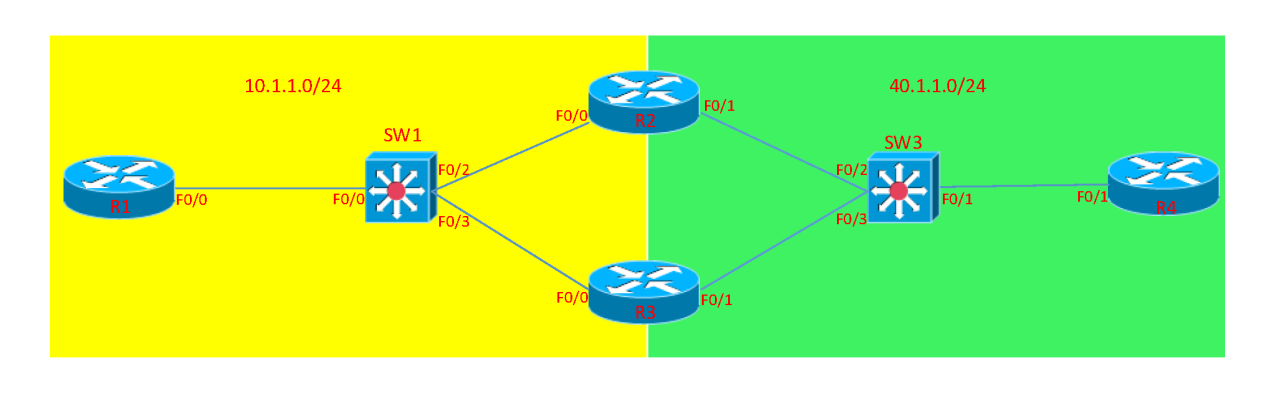
OSPF在广播类型的网络拓扑中DR和BDR的选举
指定路由器(DR): 一个网段上的其他路由器都和指定路由器(DR)构成邻接关系,而不是它们互相之间构成邻接关系。 备份指定路由器(BDR): 当DR出现问题,由BDR接…...
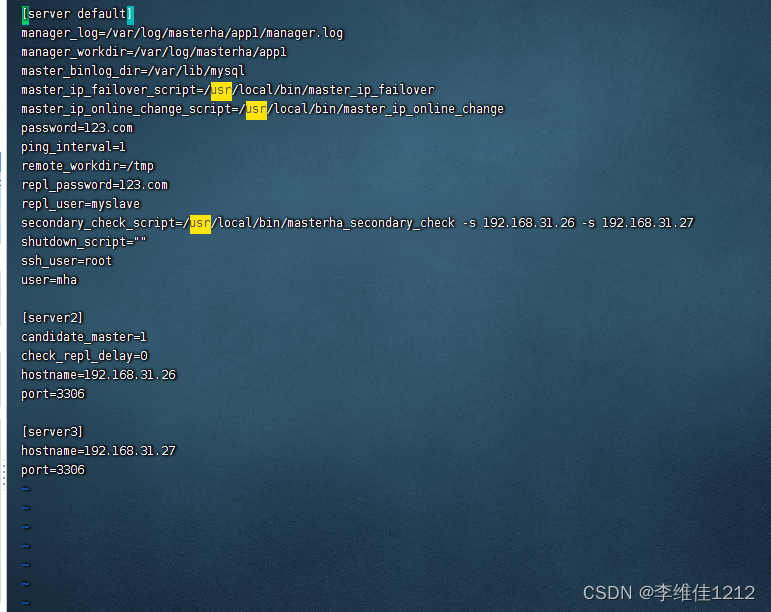
系统学习Linux-Mariadb高可用MHA
概念 MHA(MasterHigh Availability)是一套优秀的MySQL高可用环境下故障切换和主从复制的软件。 MHA 的出现就是解决MySQL 单点的问题。 MySQL故障切换过程中,MHA能做到0-30秒内自动完成故障切换操作。 MHA能在故障切换的过程中最大程度上…...

慢SQL的原因
如何排查慢SQL问题 识别慢SQL:使用数据库性能监控工具,如慢SQL日志,识别耗时较长的查询。执行计划分析:使用数据库提供的分析工具,例如EXPLAIN来查看查询的执行计划,判断是否存在全表扫描,索引…...

php正则替换文章的图片
要使用正则表达式替换文章中的图片链接,可以按照以下步骤进行操作: 1. 获取文章内容:首先,你需要获取包含图片链接的文章内容。你可以从文件中读取文章,或者从数据库中检索文章内容。 2. 使用正则表达式匹配图片链接…...

57 | TAPTAP客户端分析
TAPTAP客户端分析 一、用户群分析 首先,TapTap用户群可分为三大类: 游戏爱好者游戏发烧者游戏开发者(次要用户,有开发者后台,可以显示数据,不重点分析)注:爱好者与发烧者区别在于,前者是用空余时间来玩游戏,时间不如后者充足,且后者更执着于游戏,游戏种类更多。 …...

开源了一套基于springboot+vue+uniapp的商城,包含分类、sku、商户管理、分销、会员、适合企业或个人二次开发
RuoYi-Mall-JAVA商城-电商系统简介 开源了一套基于若依框架,SringBoot2MybatisPlusSpringSecurityjwtredisVueUniapp的前后端分离的商城系统, 包含分类、sku、商户管理、分销、会员、适合企业或个人二次开发。 前端采用Vue、Element UI(ant…...
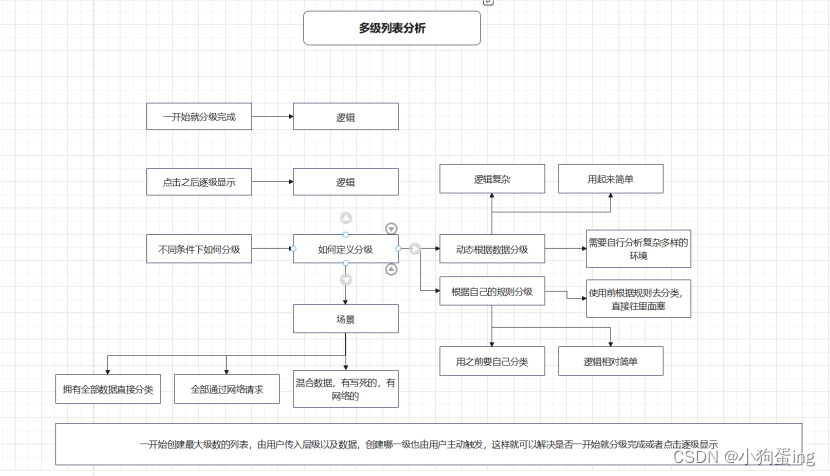
Android进阶之多级列表
遇到一个需求需要显示多级列表,因为界面是在平板上的,所以层级是从左向右往下排的,类似于 我当时的写法是在xml布局里一个个RecyclerView往下排的 当然前提是已经规定好最大的层级我才敢如此去写界面,如果已经明确规定只有两级或…...
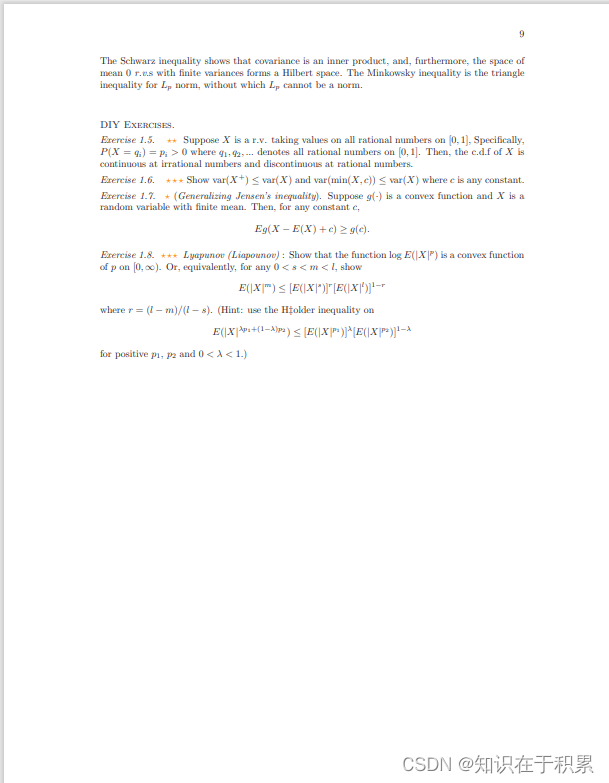
Stochastic: Distribution-Expectation-Inequalities
见:https://www.math.hkust.edu.hk/~makchen/MATH5411/Chap1Sec2.pdf...
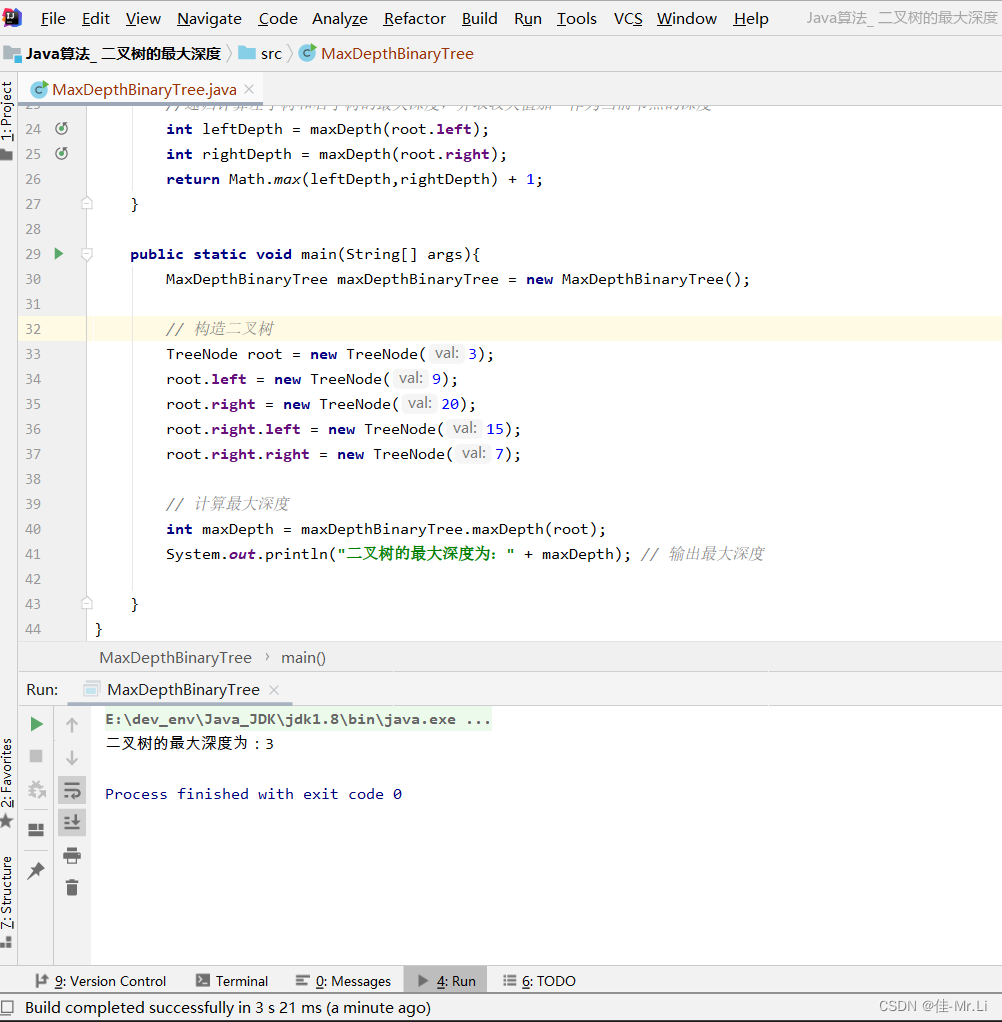
Java算法_ 二叉树的最大深度(LeetCode_Hot100)
题目描述:给定一个二叉树 ,返回其最大深度。root 二叉树的 最大深度 是指从根节点到最远叶子节点的最长路径上的节点数。 获得更多?算法思路:代码文档,算法解析的私得。 运行效果 完整代码 /*** 2 * Author: LJJ* 3 * Date: 2023/…...
行业追踪,2023-08-18
自动复盘 2023-08-18 凡所有相,皆是虚妄。若见诸相非相,即见如来。 k 线图是最好的老师,每天持续发布板块的rps排名,追踪板块,板块来开仓,板块去清仓,丢弃自以为是的想法,板块去留让…...

进化智能体实战:从基因编码到种群优化的完整实现指南
1. 项目概述:从蓝图到智能体,一次开源协作的深度实践最近在开源社区里,一个名为planck-lab/hermes-evolving-agents-public-blueprint的项目引起了我的注意。乍一看这个标题,它像是一个技术蓝图或公开的设计文档,但深入…...

Manage Buddy:轻量自托管团队协作工具的设计、部署与实战
1. 项目概述与核心价值最近在梳理团队内部工具链时,我重新审视了一个我们重度依赖的开源项目——maziminds/manage-buddy。这并非一个广为人知的明星项目,但在中小型技术团队,尤其是追求敏捷与效率的研发团队中,它扮演着“隐形冠军…...

学Simulink——交流微电网中双向DC-AC变换器的多模式切换仿真
目录 手把手教你学Simulink——交流微电网中双向DC-AC变换器的多模式切换仿真 一、背景与挑战 1.1 交流微网的“多面手”需求 1.2 核心痛点与多模式设计的“死穴” 二、系统架构与核心控制推导 2.1 整体架构:功率级与“三态”控制魔方 2.2 核心数学推导&#…...

API Key认证系统设计:企业级API开放平台实践
API Key认证系统设计:企业级API开放平台实践 摘要:当AI应用从内部工具转向对外开放时,如何确保接口安全、防止滥用并实现精细化权限控制?本文基于一个真实的跑步教练AI项目,详细解析如何构建一套生产级的API Key认证系…...

Taotoken的Token Plan套餐如何帮助个人开发者更可控地规划AI支出
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的Token Plan套餐如何帮助个人开发者更可控地规划AI支出 对于个人开发者或小型项目团队而言,大模型API的调用成…...

实景复刻:动态目标实时映射与轨迹溯源平台
实景复刻:动态目标实时映射与轨迹溯源平台技术定位:实景动态复刻体系构建者 时空轨迹全链路溯源范式开创者执行摘要在数字孪生、视频孪生从静态可视化向动态可计算演进的关键阶段,物理世界与数字世界时空不同步、虚实不精准、动态不连续、轨…...

一键获取Steam游戏清单:Onekey工具让游戏管理变得如此简单
一键获取Steam游戏清单:Onekey工具让游戏管理变得如此简单 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey 你是否曾为管理Steam游戏文件而烦恼?想备份心爱的游戏却不知从…...

2019 年旧作升级!用木材与电路打造更美观的电压表时钟
2019 年旧作升级!用木材与电路打造更美观的电压表时钟早在 2019 年,作者制作了一个简单的电压表时钟,这类时钟使用模拟面板电压表来显示时间,而非传统钟面。不过,网上大多数此类设计过于复杂且不太美观,于是…...

Wand-Enhancer终极指南:免费解锁WeMod专业功能的完整解决方案
Wand-Enhancer终极指南:免费解锁WeMod专业功能的完整解决方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂订阅费…...

MySQL 视图使用场景与限制
视图是把查询封装成「虚拟表」的方式,用对了简化查询,用错了性能爆炸。这篇说说视图的用法和注意事项。 什么是视图? -- 视图:保存好的 SQL 查询,像表一样使用 CREATE VIEW view_name AS SELECT column1, column2 FROM…...