曲面(弧面、柱面)展平(拉直)瓶子标签识别ocr
瓶子或者柱面在做字符识别的时候由于变形,识别效果是很不好的
或者是检测瓶子表面缺陷的时候效果也没有展平的好
下面介绍两个项目,关于曲面(弧面、柱面)展平(拉直)
项目一:通过识别曲面的6个点展开
 图1
图1
如 图1所示,通过A、B、C、D、E、F六个点,对柱面展成平面,对应公式可参考下图(图2)
用这个项目的前提是,需要找到这6个点,和通过机器视觉的算法或者是深度学习的算法来实现。
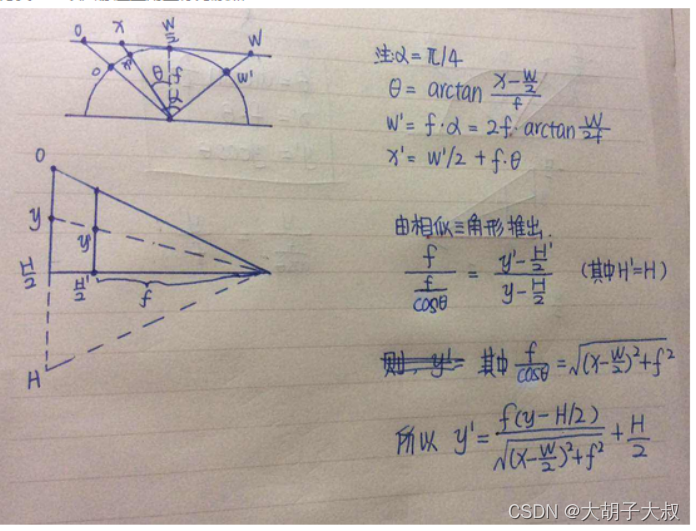
图2
1、 项目一代码
import cv2
import numpy as npBLACK_COLOR = (0, 0, 0)
WHITE_COLOR = (255, 255, 255)
YELLOW_COLOR = (0, 255, 255)
RED_COLOR = (0, 0, 255)class Line(object):def __init__(self, point1, point2):"""For line formula y(x) = k * x + b, calc k and b paramsIf the line is vertical, set "vertical" attr to True and save "x" position of the line"""self.point1 = point1self.point2 = point2self.vertical = Falseself.fixed_x = Noneself.k = Noneself.b = None# cached angle propsself.angle = Noneself.angle_cos = Noneself.angle_sin = Noneself.set_line_props(point1, point2)def is_vertical(self):return self.verticaldef set_line_props(self, point1, point2):if point2[0] - point1[0]:self.k = float(point2[1] - point1[1]) / (point2[0] - point1[0])self.b = point2[1] - self.k * point2[0]k_normal = - 1 / self.kelse:self.vertical = Trueself.fixed_x = point2[0]k_normal = 0self.angle = np.arctan(k_normal)self.angle_cos = np.cos(self.angle)self.angle_sin = np.sin(self.angle)def get_x(self, y):if self.is_vertical():return self.fixed_xelse:return int(round(float(y - self.b) / self.k))def get_y(self, x):return self.k * x + self.bclass LabelUnwrapper(object):COL_COUNT = 30ROW_COUNT = 20def __init__(self, src_image=None, pixel_points=None, percent_points=None):"""Point lists are lists of 6 points - [A, B, C, D, E, F]:param pixel_points: List[Tuple] Points, whose coordinates specified as pixels:param percent_points: List[Tuple] Points, whose coordinates specified as fraction of image width/heightIn both cases points represent figure below:| | | || B | A C| / \ | | \ / |A C | B || | | || | OR | || | | |F D F D| \ / | | \ / || E | | E || | | |So, A-B-C-D-E-F-A polygon represent raw wine label on bottle"""self.src_image = src_imageself.width = self.src_image.shape[1]self.height = src_image.shape[0]self.dst_image = Noneself.points = pixel_pointsself.percent_points = percent_pointsself.point_a = None # top leftself.point_b = None # top centerself.point_c = None # top rightself.point_d = None # bottom rightself.point_e = None # bottom centerself.point_f = None # bottom leftself.center_line = Noneself.load_points()def load_points(self):if self.points is None:points = []for point in self.percent_points:x = int(point[0] * self.width)y = int(point[1] * self.height)points.append((x, y))self.points = pointsself.points = np.array(self.points)(self.point_a, self.point_b, self.point_c,self.point_d, self.point_e, self.point_f) = self.pointscenter_top = (self.point_a + self.point_c) / 2center_bottom = (self.point_d + self.point_f) / 2self.center_line = Line(center_bottom, center_top)if not len(self.points) == 6:raise ValueError("Points should be an array of 6 elements")def unwrap(self, interpolate=False):source_map = self.calc_source_map()if interpolate:self.unwrap_label_interpolation(source_map)else:self.unwrap_label_perspective(source_map)return self.dst_imagedef calc_dest_map(self):width, height = self.get_label_size()dx = float(width) / (self.COL_COUNT - 1)dy = float(height) / (self.ROW_COUNT - 1)rows = []for row_index in range(self.ROW_COUNT):row = []for col_index in range(self.COL_COUNT):row.append([int(dx * col_index),int(dy * row_index)])rows.append(row)return np.array(rows)def unwrap_label_interpolation(self, source_map):"""Unwrap label using interpolation - more accurate method in terms of quality"""from scipy.interpolate import griddatawidth, height = self.get_label_size()dest_map = self.calc_dest_map()grid_x, grid_y = np.mgrid[0:width - 1:width * 1j, 0:height - 1:height * 1j]destination = dest_map.reshape(dest_map.size // 2, 2)source = source_map.reshape(source_map.size // 2, 2)grid_z = griddata(destination, source, (grid_x, grid_y), method='cubic')map_x = np.append([], [ar[:, 0] for ar in grid_z]).reshape(width, height)map_y = np.append([], [ar[:, 1] for ar in grid_z]).reshape(width, height)map_x_32 = map_x.astype('float32')map_y_32 = map_y.astype('float32')warped = cv2.remap(self.src_image, map_x_32, map_y_32, cv2.INTER_CUBIC)self.dst_image = cv2.transpose(warped)def unwrap_label_perspective(self, source_map):"""Unwrap label using transform, unlike unwrap_label_interpolation doesn't require scipy"""width, height = self.get_label_size()self.dst_image = np.zeros((height, width, 3), np.uint8)dx = float(width) / (self.COL_COUNT - 1)dy = float(height) / (self.ROW_COUNT - 1)dx_int = int(np.ceil(dx))dy_int = int(np.ceil(dy))for row_index in range(self.ROW_COUNT - 1):for col_index in range(self.COL_COUNT - 1):src_cell = (source_map[row_index][col_index],source_map[row_index][col_index + 1],source_map[row_index + 1][col_index],source_map[row_index + 1][col_index + 1])dst_cell = np.int32([[0, 0], [dx, 0], [0, dy], [dx, dy]])M = cv2.getPerspectiveTransform(np.float32(src_cell), np.float32(dst_cell))dst = cv2.warpPerspective(self.src_image, M, (dx_int, dy_int))x_offset = int(dx * col_index)y_offset = int(dy * row_index)self.dst_image[y_offset:y_offset + dy_int,x_offset:x_offset + dx_int] = dstdef get_roi_rect(self, points):max_x = min_x = points[0][0]max_y = min_y = points[0][1]for point in points:x, y = pointif x > max_x:max_x = xif x < min_x:min_x = xif y > max_y:max_y = yif y < min_y:min_y = yreturn np.array([[min_x, min_y],[max_x, min_y],[max_x, max_y],[min_x, max_y]])def get_roi(self, image, points):rect = self.get_roi_rect(points)return image[np.floor(rect[0][1]):np.ceil(rect[2][1]),np.floor(rect[0][0]):np.ceil(rect[1][0])]def calc_source_map(self):top_points = self.calc_ellipse_points(self.point_a, self.point_b, self.point_c,self.COL_COUNT)bottom_points = self.calc_ellipse_points(self.point_f, self.point_e, self.point_d,self.COL_COUNT)rows = []for row_index in range(self.ROW_COUNT):row = []for col_index in range(self.COL_COUNT):top_point = top_points[col_index]bottom_point = bottom_points[col_index]delta = (top_point - bottom_point) / float(self.ROW_COUNT - 1)point = top_point - delta * row_indexrow.append(point)rows.append(row)return np.array(rows)def draw_mesh(self, color=RED_COLOR, thickness=1):mesh = self.calc_source_map()for row in mesh:for x, y in row:point = (int(round(x)), int(round(y)))cv2.line(self.src_image, point, point, color=color, thickness=thickness)def draw_poly_mask(self, color=WHITE_COLOR):cv2.polylines(self.src_image, np.int32([self.points]), 1, color)def draw_mask(self, color=WHITE_COLOR, thickness=1, img=None):"""Draw mask, if image not specified - draw to source image"""if img is None:img = self.src_imagecv2.line(img, tuple(self.point_f.tolist()), tuple(self.point_a.tolist()), color, thickness)cv2.line(img, tuple(self.point_c.tolist()), tuple(self.point_d.tolist()), color, thickness)self.draw_ellipse(img, self.point_a, self.point_b, self.point_c, color, thickness)self.draw_ellipse(img, self.point_d, self.point_e, self.point_f, color, thickness)def get_label_contour(self, color=WHITE_COLOR, thickness=1):mask = np.zeros(self.src_image.shape)self.draw_mask(color, thickness, mask)return maskdef get_label_mask(self):"""Generate mask of the label, fully covering it"""mask = np.zeros(self.src_image.shape)pts = np.array([[self.point_a, self.point_c, self.point_d, self.point_f]])cv2.fillPoly(mask, pts, WHITE_COLOR)self.draw_filled_ellipse(mask, self.point_a, self.point_b, self.point_c, True)self.draw_filled_ellipse(mask, self.point_f, self.point_e, self.point_d, False)return maskdef draw_ellipse(self, img, left, top, right, color=WHITE_COLOR, thickness=1):"""Draw ellipse using opencv function"""is_arc, center_point, axis, angle = self.get_ellipse_params(left, top, right)if is_arc:start_angle, end_angle = 0, 180else:start_angle, end_angle = 180, 360cv2.ellipse(img, center_point, axis, angle, start_angle, end_angle, color, thickness)def draw_filled_ellipse(self, img, left, top, right, is_top=False):is_arc, center_point, axis, angle = self.get_ellipse_params(left, top, right)if is_arc ^ is_top:color = WHITE_COLORelse:color = BLACK_COLORcv2.ellipse(img, center_point, axis, angle, 0, 360, color=color, thickness=-1)def get_ellipse_params(self, left, top, right):center = (left + right) / 2center_point = tuple(map(lambda x: int(np.round(x)), center.tolist()))axis = (int(np.linalg.norm(left - right) / 2), int(np.linalg.norm(center - top)))x, y = left - rightangle = np.arctan(float(y) / x) * 57.296is_arc = Falseif (top - center)[1] > 0:is_arc = Truereturn is_arc, center_point, axis, angledef calc_ellipse_points(self, left, top, right, points_count):center = (left + right) / 2# get ellipse axisa = np.linalg.norm(left - right) / 2b = np.linalg.norm(center - top)# get start and end anglesif (top - center)[1] > 0:delta = np.pi / (points_count - 1)else:delta = - np.pi / (points_count - 1)cos_rot = (right - center)[0] / asin_rot = (right - center)[1] / apoints = []for i in range(points_count):phi = i * deltadx, dy = self.get_ellipse_point(a, b, phi)x = round(center[0] + dx * cos_rot - dy * sin_rot)y = round(center[1] + dx * sin_rot + dy * cos_rot)points.append([x, y])points.reverse()return np.array(points)def get_ellipse_point(self, a, b, phi):"""Get ellipse radius in polar coordinates"""return a * np.cos(phi), b * np.sin(phi)def get_label_size(self):top_left = self.point_atop_right = self.point_cbottom_right = self.point_dbottom_left = self.point_fwidth1 = np.linalg.norm(top_left - top_right)width2 = np.linalg.norm(bottom_left - bottom_right)avg_width = int((width1 + width2) * np.pi / 4)height1 = np.linalg.norm(top_left - bottom_left)height2 = np.linalg.norm(top_right - bottom_right)avg_height = int((height1 + height2) / 2)return avg_width, avg_heightif __name__ == '__main__':shape = {"tag": "label", "shape": [{"x": 0.012232142857142842, "y": 0.2219140625},{"x": 0.48655701811449864, "y": 0.14404355243445227},{"x": 0.9632539682539681, "y": 0.2171875},{"x": 0.9466567460317459, "y": 0.7276953125},{"x": 0.48447501824501454, "y": 0.7952298867391453},{"x": 0.023134920634920626, "y": 0.7258984375}]}points = []for point in shape['shape']:points.append([point['x'], point['y']])imcv = cv2.imread('image.jpg', cv2.IMREAD_UNCHANGED)unwrapper = LabelUnwrapper(src_image=imcv, percent_points=points)dst_image = unwrapper.unwrap()for point in unwrapper.points:cv2.line(unwrapper.src_image, tuple(point), tuple(point), color=YELLOW_COLOR, thickness=3)# unwrapper.draw_mesh()cv2.imwrite("image_with_mask.png", imcv)cv2.imwrite("unwrapped.jpg", dst_image)
2、原始代码github地址库:
GitHub - Nepherhotep/unwrap_labels: Algorithm to unwrap labels using edge markers
项目二:对项目一的升级版,实现深度学习曲面标签位置,并进行字符识别
1、通过训练掩膜图像,获得模型后,自动计算6个点的位置

图3 掩膜图像

图5 深度学习后找到的六个点
2、将弧映射至曲面
自己拿了矿泉水瓶做的实验

图6 网格圆柱投影
3、进行展开

图7 展开后效果图
展开前字符识别效果很不好
 图8 未展开直接识别字符
图8 未展开直接识别字符
 图9 展开后字符全部识别出来
图9 展开后字符全部识别出来
图8和图9用的百度飞桨做的字符识别,对中文识别效果很好,项目用到的pytesseract字符库识别效果非常不好,对于广告体的中文字无法识别。
展开流程图
 图10 展开流程图
图10 展开流程图
4、项目二github地址:
GitHub - AntoninLeroy/wine_label_reader_toolkit: Computer vision project to read a label on a wine bottle using tensorflow, OpenCV and Tesseract.
项目三依赖的库
Flask==2.0.2
Flask_Cors==3.0.10
imutils==0.5.4
keras==2.8.0
numpy==1.21.5
opencv_python==4.5.5.62
Pillow==9.0.1
pytesseract==0.3.8
scikit_learn==1.0.2
scipy==1.7.3
tensorflow==2.8.0
tqdm==4.62.3
特别说明:项目二用了深度学习,使用框架,依赖gpu,无gpu无法运行,没有gpu的同学可以看项目三,项目三是本人改进的版本
项目三:自己通过视觉算法或者ps生成掩膜图像放置对应的位置即可
1、项目三基础代码
import cv2
import numpy as np
from showVision import *
import json
#日期:2023年8月10日
#作者:大胡子大叔
#托管:csdn
#程序功能:通过掩膜图像和原始图像,对柱形图进行拉伸,或者说是展开,曲面展成平面图形
#之所以修改,是因为cpu电脑无法运行tensorflow和keras的库一直报错,所以直接去掉了,没有用深度学习对识别位置进行检测
#可以通过传统的二维算法将位置提取出来,然后再展开即可
#重要的算法是展开
#倾斜的图像也可以矫正
#原始图像路径
img = cv2.imread("./img/train_and_valid/X/400.png")#遮罩图像路径
mask = cv2.imread("./img/train_and_valid/Y/400.png", 0)#得到遮罩后的图像
image = cv2.bitwise_and(img, img, mask=mask)label = labelVision()
mesh,unwrapped=label.readLabels(mask, img)# 最近邻插值法缩放# 缩放到原来的四分之一
image_scale = cv2.resize(image, (0, 0), fx=0.5, fy=0.5, interpolation=cv2.INTER_NEAREST)
mesh_scale = cv2.resize(mesh, (0, 0), fx=0.5, fy=0.5, interpolation=cv2.INTER_NEAREST)
unwrapped_scale = cv2.resize(unwrapped, (0, 0), fx=0.5, fy=0.5, interpolation=cv2.INTER_NEAREST)
# 显示结果图像
#因为图片尺寸过大,需要缩放窗口,缩放窗口以后,显示窗口有时看不见,所以需要设置一下显示窗口的位置
cv2.imshow('cut', image_scale)
#设置窗口的位置
cv2.moveWindow('cut',100,100)
cv2.waitKey(0)
cv2.imshow('mesh', mesh_scale)
cv2.moveWindow('mesh',100,100)
cv2.waitKey(0)
cv2.imshow('unwrapped', unwrapped_scale)
cv2.moveWindow('unwrapped',100,100)
cv2.waitKey(0)
cv2.destroyAllWindows()2、项目三依赖的库
imutils
numpy
opencv_python如果不做字符识别可不安装下面的库
pytesseract
曲面(弧面、柱面)展平(拉直)需要自己做一个遮罩层
此代码主要是为了方便嫁接使用
自己用视觉算法识别遮罩即可进行嫁接
里面代码去掉了原始程序对gpu的依赖(即自动检测遮罩层位置,所以需要自己做遮罩层)
如果就想用深度学习识别,不想去掉的话,可以访问原始代码地址
https://github.com/AntoninLeroy/wine_label_reader_toolkit
原始代码包含自动识别、展开、字符识别整个流程
如果只想要柱面展开代码,请自行下载
本里面包含两个版本,一个版本包含字符识别,一个版本不包含字符识别
3、项目三代码下载地址
https://download.csdn.net/download/sunnyrainflower/88228306
扩展一:平面变曲面(平面向柱面投影)

图11
参考链接:柱面投影介绍与python实现(一)_zwx1995zwx的博客-CSDN博客
实现代码
from skimage.io import imread, imshow ,imsave
from skimage.transform import resize
import math
import numpy as npimg = imread('img.jpg')
img = (resize(img , [1000,800])*255).astype(np.uint8)###圆柱投影
def cylindrical_projection(img , f) :rows = img.shape[0]cols = img.shape[1]#f = cols / (2 * math.tan(np.pi / 8))blank = np.zeros_like(img)center_x = int(cols / 2)center_y = int(rows / 2)for y in range(rows):for x in range(cols):theta = math.atan((x- center_x )/ f)point_x = int(f * math.tan( (x-center_x) / f) + center_x)point_y = int( (y-center_y) / math.cos(theta) + center_y)if point_x >= cols or point_x < 0 or point_y >= rows or point_y < 0:passelse:blank[y , x, :] = img[point_y , point_x ,:]return blankwaved_img = cylindrical_projection(img,500)
imshow(waved_img)拓展二:弧面表拉直(展平)

图12
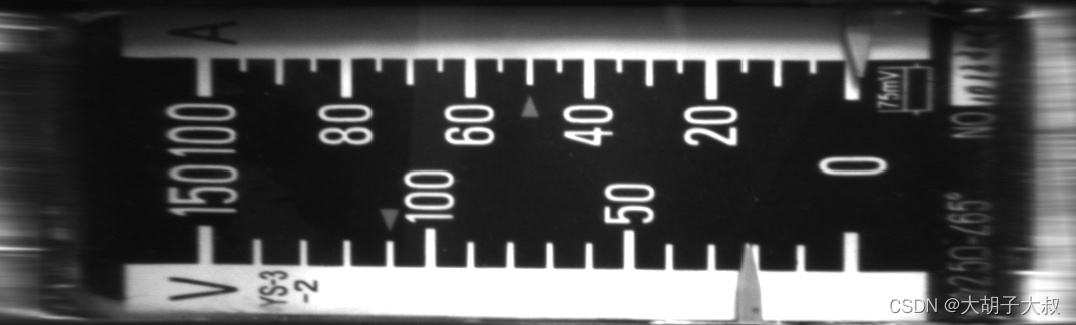 图 13
图 13
用了项目三中的代码将弧形表进行展开,发现两侧的刻度过度拉伸,直接用的话效果不是很好,还需对代码进行调整才能使用,不过为弧度表的表盘识别提供了新方向。
------------------------------------------------------------
声明 | 未经允许,禁止转载,谢谢合作!
作者 | 大胡子大叔
出品 | CSDN
-------------------------------------------------------------
相关文章:
曲面(弧面、柱面)展平(拉直)瓶子标签识别ocr
瓶子或者柱面在做字符识别的时候由于变形,识别效果是很不好的 或者是检测瓶子表面缺陷的时候效果也没有展平的好 下面介绍两个项目,关于曲面(弧面、柱面)展平(拉直) 项目一:通过识别曲面的6个点…...
知识继承概述
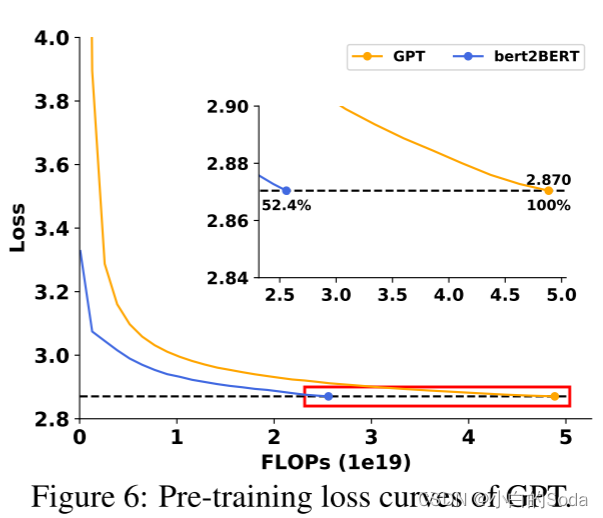
文章目录 知识继承第一章 知识继承概述1.背景介绍第一页 背景第二页 大模型训练成本示例第三页 知识继承的动机 2.知识继承的主要方法 第二章 基于知识蒸馏的知识继承预页 方法概览 1.知识蒸馏概述第一页 知识蒸馏概述第二页 知识蒸馏第三页 什么是知识第四页 知识蒸馏的核心目…...

深度剖析数据在内存中的存储
目录 一、数据类型介绍 类型的基本归类 1.整形家族 2.浮点数家族 3.构造类型 (自定义类型) 4.指针类型 5.空类型 二、整形在内存中的存储 1.原码、反码、补码 1.1原码 1.2反码 1.3补码 1.4计算规则 2 .大小端介绍 三、浮点型在内存中的存…...

【ARM Linux 系统稳定性分析入门及渐进10 -- GDB 初始化脚本介绍及使用】
文章目录 gdb 脚本介绍gdb 初始化脚本使用启动 gdb 的时候自动执行脚本gdb运行期间执行命令脚本 gdb 脚本介绍 GDB脚本是一种使用GDB命令语言编写的脚本,可以用来自动化一些常见的调试任务。这些脚本可以直接在GDB中运行,也可以通过GDB的-x参数或source…...
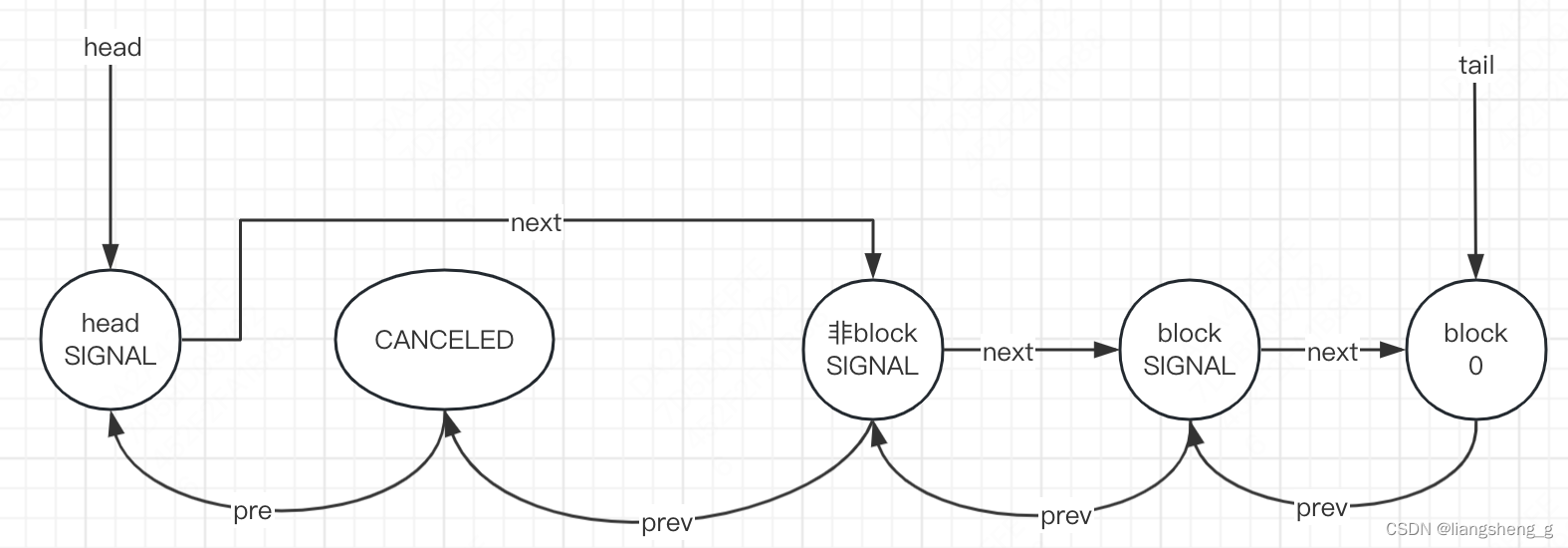
AQS源码解读
文章目录 前言一、AQS是什么?二、解读重点属性statehead、tail 同步变量竞争acquire 同步变量释放 总结 前言 AQS是AbstractQueuedSynchronizer的缩写,也是大神Doug Lea的得意之作。今天我们来进行尽量简化的分析和理解性的代码阅读。 一、AQS是什么&am…...
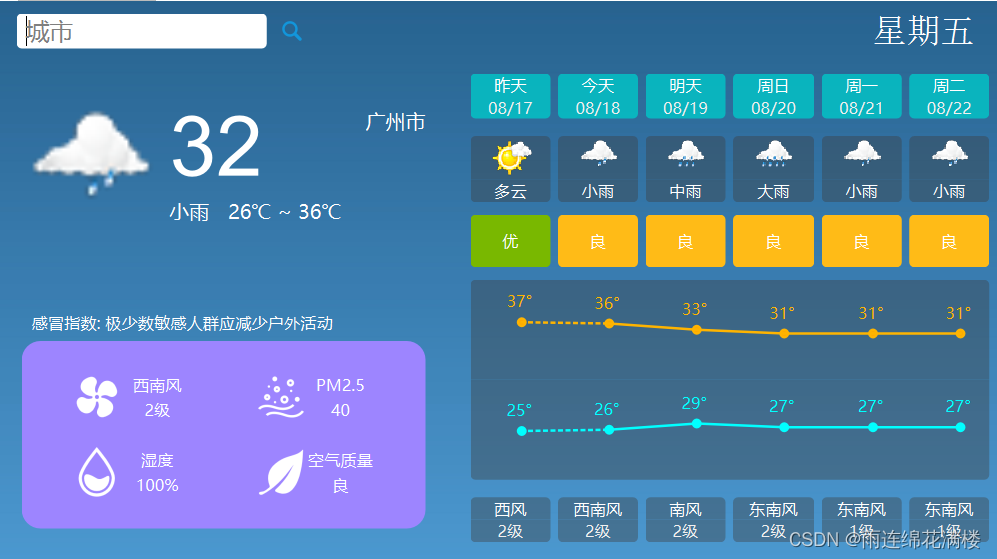
QT实现天气预报
1. MainWindow类设计的成员变量和方法 public: MainWindow(QWidget* parent nullptr); ~MainWindow(); protected: 形成文本菜单来用来右键关闭窗口 void contextMenuEvent(QContextMenuEvent* event); 鼠标被点击之后此事件被调用 void mousePressEvent(QMouseEv…...

【马蹄集】第二十三周——进位制专题
进位制专题 目录 MT2186 二进制?不同!MT2187 excel的烦恼MT2188 单条件和MT2189 三进制计算机1MT2190 三进制计算机2 MT2186 二进制?不同! 难度:黄金 时间限制:1秒 占用内存:128M 题目…...

[足式机器人]Part3 变分法Ch01-1 数学预备知识——【读书笔记】
本文仅供学习使用 本文参考: 《变分法基础-第三版》老大中 《变分学讲义》张恭庆 《Calculus of Variations of Optimal Control Theory》-变分法和最优控制论-Daneil Liberzon Ch01-1 数学基础-预备知识1 1 数学基础-预备知识1.1 泰勒公式1.1.1 一元函数的泰勒公式…...
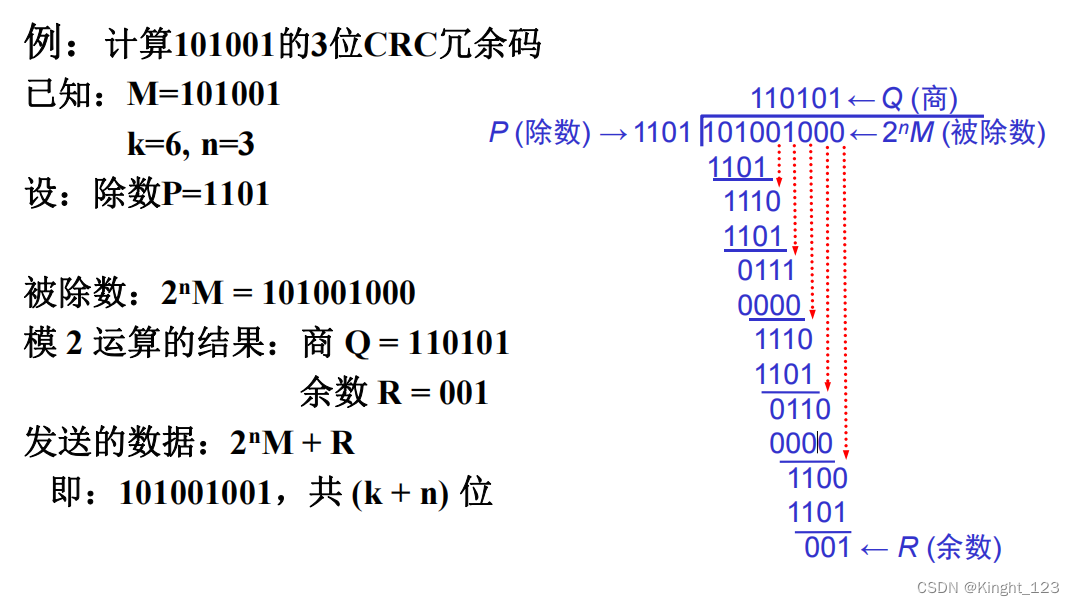
计算机网络----CRC冗余码的运算
目录 1. 冗余码的介绍及原理2. CRC检验编码的例子3. 小练习 1. 冗余码的介绍及原理 冗余码是用于在数据链路层的通信链路和传输数据过程中可能会出错的一种检错编码方法(检错码)。原理:发送发把数据划分为组,设每组K个比特&#…...
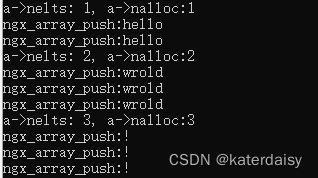
将Nginx源码数组结构(ngx_array.c)和内存池代码单独编译运行,附代码
在上面一篇的基础上把Nginx源码数组结构也摘录下来,也增加了测试代码,编译运行。 https://blog.csdn.net/katerdaisy/article/details/132358883 《将nginx内存池代码单独编译运行,了解nginx内存池工作原理,附代码》 核心代码&…...
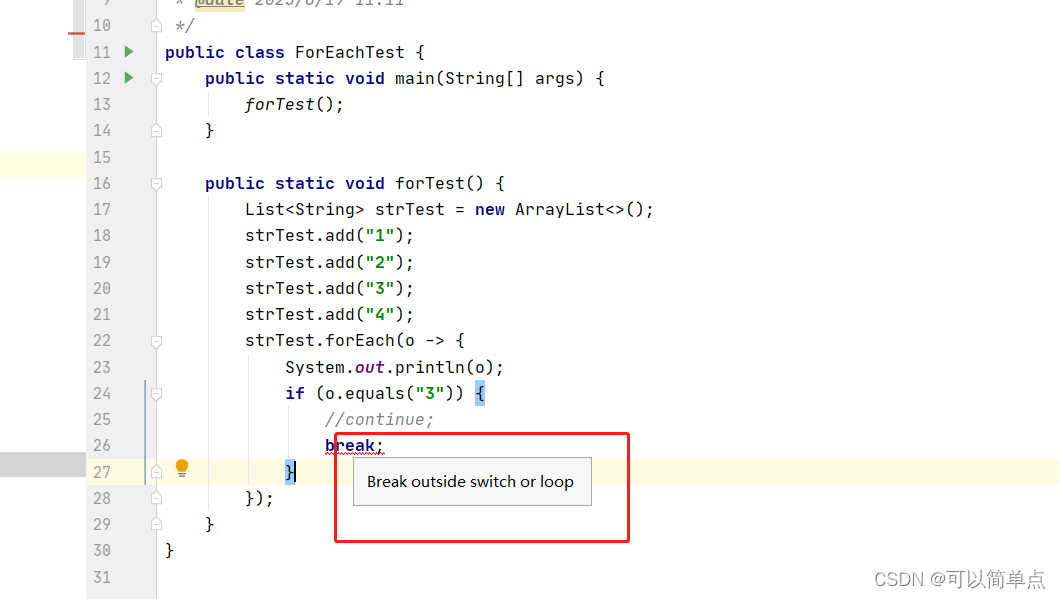
java forEach中不能使用break和continue的原因
1.首先了解break和continue的使用范围和作用 1.1使用范围 break适用范围:只能用于switch或者是循环语句中。当然可以用于增强for循环。 continue适用范围: 用于循环语句中。 1.2作用 break: 1. break用于switch语句的作用是结束一个switch语句。 2. break用于循…...

[杂项]水浒英雄谱系列电影列表
年份 片名 导演 主演 2006-01-01 母夜叉孙二娘 张建亚 周海媚 、 莫少聪 、 于承惠 [1] 2008-01-01 碧瑶霜迷案 黄祖权 陈龙 、 陈德容 、 翁家明 [7] 2008-05-09 青面兽杨志 张建亚 吕良伟 、 计春华 、 孟广美 [2] 2008-05-09 扈三娘与矮脚虎王英 张建亚 曾宝仪 、 郭德纲 、…...

6.RocketMQ之索引文件ConsumeQueue
本文着重分析为consumequeue/topic/queueId目录下的索引文件。 1.ConsumeQueueStore public class ConsumeQueueStore {protected final ConcurrentMap<String>, ConcurrentMap<Integer>, ConsumeQueueInterface>> consumeQueueTable;public boolean load(…...

【C++学习手札】一文带你认识C++虚继承
食用指南:本文在有C基础的情况下食用更佳 🍀本文前置知识:C虚函数(很重要,内部剖析) ♈️今日夜电波:僕らのつづき—柊優花 1:06 ━━━━━━️💟──────── 3:51 …...

神经网络基础-神经网络补充概念-63-残差网络
概念 残差网络(Residual Network,ResNet)是一种深度卷积神经网络结构,旨在解决深层网络训练中的梯度消失和梯度爆炸问题,以及帮助训练非常深的网络。ResNet 在2015年被提出,其核心思想是引入了"残差块…...
【从0开始学架构笔记】01 基础架构
文章目录 一、架构的定义1. 系统与子系统2. 模块与组件3. 框架与架构4. 重新定义架构 二、架构设计的目的三、复杂度来源:高性能1. 单机复杂度2. 集群复杂度2.1 任务分配2.2 任务分解(微服务) 四、复杂度来源:高可用1. 计算高可用…...
vue3+ts+vite使用el-breadcrumb实现面包屑组件,实现面包屑过渡动画
简介 使用 element-plus 的 el-breadcrumb 组件,实现根据页面路由动态生成面包屑导航,并实现面包屑导航的切换过渡动画 一、先看效果加粗样式 1.1 静态效果 1.2 动态效果 二、全量代码 <script lang"ts" setup> import { ref, watch…...
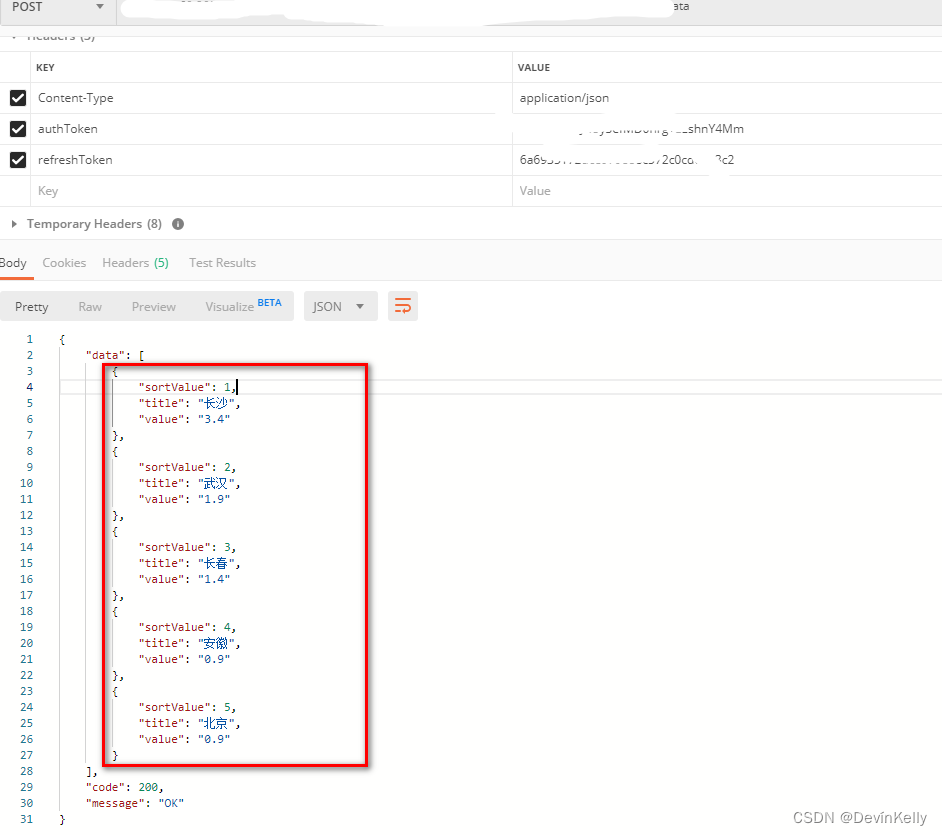
【Java 动态数据统计图】动态数据统计思路案例(动态,排序,数组)四(116)
需求::前端根据后端的返回数据:画统计图; 1.动态获取地域数据以及数据中的平均值,按照平均值降序排序; 说明: X轴是动态的,有对应区域数据则展示; X轴 区域数据降序排序…...

Chrome命令行开关
Electron 支持的命令行开关 –client-certificatepath 设置客户端的证书文件 path . –ignore-connections-limitdomains 忽略用 , 分隔的 domains 列表的连接限制. –disable-http-cache 禁止请求 HTTP 时使用磁盘缓存. –remote-debugging-portport 在指定的 端口 通…...

元宇宙赛道加速破圈 和数软件抓住“元宇宙游戏”发展新风口
当下海外游戏市场仍然具备较大的增长空间。据机构预测,至2025年全球移动游戏市场规模将达1606亿美元,对应2020-2025年复合增长率11%。与此同时,随着元宇宙概念持续升温,国内外多家互联网巨头纷纷入场。行业分析平台New…...

OAuth 2.0 and OIDC 三大安全机制对比:State vs Nonce vs PKCE
一、问题背景 OAuth 2.0 和 OpenID Connect 的授权流程依赖浏览器重定向,这天然暴露了多种攻击面: 攻击类型描述CSRF攻击者诱导用户的浏览器携带恶意授权码完成绑定Token 重放窃取的 id_token 被重复提交给客户端授权码劫持恶意应用在同一设备上拦截授…...

Python try...except ImportError 语句详解
在Python编程中,ImportError 是与模块导入相关的核心异常。优雅地处理它,是编写健壮、可维护和跨平台代码的关键。try...except ImportError 结构正是实现这一目标的标准工具。本文将为你抽丝剥茧,从基础概念到高级实践,全面解析这…...

CCPD车牌数据集预处理避坑指南:透视变换原理详解与OpenCV实战
CCPD车牌数据集预处理避坑指南:透视变换原理详解与OpenCV实战 车牌识别系统中,数据预处理的质量直接影响模型性能。CCPD作为目前最全面的中文车牌数据集,其四点标注特性为透视变换提供了基础,但也暗藏诸多陷阱。本文将手把手带您穿…...

Excel MCP Server终极指南:3步实现无界面Excel自动化处理
Excel MCP Server终极指南:3步实现无界面Excel自动化处理 【免费下载链接】excel-mcp-server A Model Context Protocol server for Excel file manipulation 项目地址: https://gitcode.com/gh_mirrors/ex/excel-mcp-server 你是否厌倦了手动操作Excel的繁琐…...

百度网盘直链解析终极指南:如何实现高速下载的完整技术方案
百度网盘直链解析终极指南:如何实现高速下载的完整技术方案 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 在云存储服务普及的今天,百度网盘作为国内用…...

Apex Legends进阶指南:结构化训练框架与技能模块化拆解
1. 项目概述:一个面向Apex Legends玩家的成长型技能库如果你是一位《Apex Legends》的玩家,并且对提升自己的游戏水平有持续的热情,那么你很可能和我一样,经历过一个漫长的摸索期。从最初落地成盒,到逐渐熟悉地图、枪械…...

PowerInfer:基于热点神经元预测的LLM高性能推理引擎部署指南
1. 项目概述:当推理速度成为AI落地的瓶颈最近在折腾本地大模型推理的朋友,估计都绕不开一个核心痛点:速度。模型效果再好,生成一句话要等上十几秒,那种“卡顿感”足以劝退绝大多数想把它集成到实际应用里的开发者。我自…...

自托管链接管理平台Linko:Go+React技术栈部署与核心功能解析
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫monsterxx03/linko。乍一看这个名字,可能有点摸不着头脑,但如果你经常需要管理一堆链接、书签,或者在做内容聚合、个人知识库,那这个工具很可能就是你一直在…...

CircuitPython硬件交互实战:引脚命名、模块管理与内存优化
1. 项目概述:CircuitPython硬件交互的基石 如果你刚开始接触CircuitPython,或者从Arduino转过来,可能会对如何控制板子上的某个引脚感到困惑。板子上明明印着“A0”、“D13”,但在代码里到底该怎么写? board.A0 和 …...

基于Electron的ChatGPT桌面客户端开发:架构、功能与进阶实践
1. 项目概述:一个开源桌面客户端的诞生与价值如果你和我一样,在日常开发、写作或者处理一些需要深度思考的任务时,经常需要和ChatGPT这样的AI助手对话,那你一定对在浏览器里反复切换标签页、刷新页面、管理冗长的对话历史感到厌烦…...