相机的位姿在地固坐标系ECEF和ENU坐标系的转换
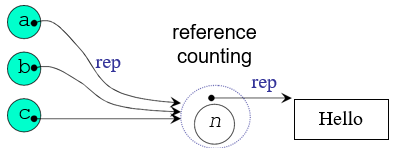
在地球科学和导航领域,通常使用地心地固坐标系(ECEF,Earth-Centered, Earth-Fixed)和东北天坐标系(ENU,East-North-Up)来描述地球上的位置和姿态。如下图所示:
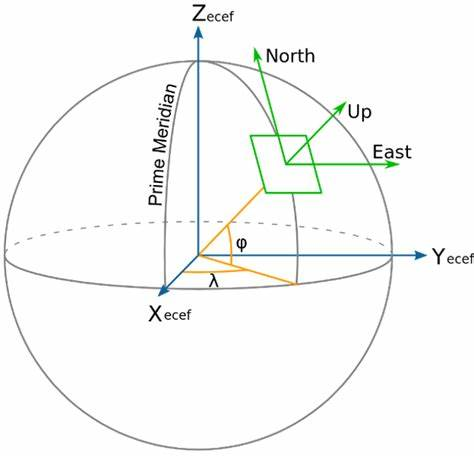
地心地固坐标ecef和东北天ENU坐标系
在倾斜摄影测量过程中,通常涉及这两个坐标系的转换,将相机的位姿互转,如果你已经有了相机在地心地固坐标系(ECEF)中的位置 Xecef_cam 和相机的姿态旋转矩阵 R,你可以通过以下步骤将它们转换到东北天坐标系(ENU):
1、计算相机位置在ENU坐标系中的坐标:
首先,将相机位置从ECEF坐标系转换为ENU坐标系。ENU坐标系是相对于参考点的局部坐标系,所以需要提供一个参考点的位置,通常使用地理坐标经纬高来表示。假设你有一个参考点的ECEF坐标为 Xecef_ref。那么,相机位置在ENU坐标系中的坐标 Xenu_cam 可以通过以下方式计算: dXecef = Xecef_cam - Xecef_ref
Xenu_cam = R_ref.T * dXecef
这里,dXecef 是相机位置相对于参考点的ECEF坐标的差值,R_ref.T 是参考点的旋转矩阵的转置,R_ref可以通过计算参考点的经纬度得到,具体形式如下
# 参考点的经纬度
lon = 114.676720
lat = 37.746420
alt = 0 # 参考点的海拔高度(单位:米)
rclat, rclng = np.radians(lat), np.radians(lon)
rot_ECEF2ENUV = np.array([[-math.sin(rclng), math.cos(rclng), 0],[-math.sin(rclat)*math.cos(rclng), -math.sin(rclat)*math.sin(rclng), math.cos(rclat)],[math.cos(rclat)*math.cos(rclng), math.cos(rclat)*math.sin(rclng), math.sin(rclat)]])2、计算相机的ENU坐标系中的姿态:
在ENU坐标系中,相机的姿态表示通常使用方向余弦矩阵(DCM,Direction Cosine Matrix)来表示。DCM可以通过以下方式计算:
DCM_enu = R * R_ref.T
这里,R_ref.T 是参考点的旋转矩阵的转置,同上。 通过这两个步骤,你就可以将相机的位置和姿态从ECEF坐标系转换到ENU坐标系中了。记得要确保使用相同的坐标单位和姿态表示方式。值得注意的是,ENU坐标系是一个局部坐标系,所以转换结果依赖于参考点的选择。
下面是一个Python代码示例
import numpy as np
import mathdef geodetic_to_ecef(lon, lat, alt):a = 6378137.0 # 地球的半长轴(赤道半径,单位:米)f = 1 / 298.257223563 # 扁率lon_rad = np.radians(lon)lat_rad = np.radians(lat)N = a / np.sqrt(1 - (f * (2 - f)) * np.sin(lat_rad)**2)x = (N + alt) * np.cos(lat_rad) * np.cos(lon_rad)y = (N + alt) * np.cos(lat_rad) * np.sin(lon_rad)z = (N * (1 - f)**2 + alt) * np.sin(lat_rad)return np.array([x, y, z])#已知的地固坐标系下的位置和姿态
ecef_x= -2108290.78524083
ecef_y= 4588675.69211609
ecef_z= 3883213.009044
#R
ecef_matrix = np.array([[-0.924619168850922, -0.37082528979597, -0.0869942356778073],[0.192895998529247, -0.258938143907446, -0.946436564900771],[0.328436487535772, -0.891874229966031, 0.310949885958594]])# 为了验证的enu坐标系下的正确位置和姿态
enu_x = -5.25326294611772
enu_y = -88.1162361244917
enu_z = 91.8780135626621
enu_matrix = np.array([[0.994999772929298, -0.0988252823926444, -0.0144573659655384],[-0.067174196729575, -0.555035783385474,-0.829109707128924],[0.0739126454971252, 0.825935132272315, -0.55889898739748]])# 参考点的经纬度
lon = 114.676720
lat = 37.746420
alt = 0 # 参考点的海拔高度(单位:米)
rclat, rclng = np.radians(lat), np.radians(lon)
#R_ref
rot_ECEF2ENUV = np.array([[-math.sin(rclng), math.cos(rclng), 0],[-math.sin(rclat)*math.cos(rclng), -math.sin(rclat)*math.sin(rclng), math.cos(rclat)],[math.cos(rclat)*math.cos(rclng), math.cos(rclat)*math.sin(rclng), math.sin(rclat)]])# 计算参考点的ECEF坐标
Xecef_ref = geodetic_to_ecef(lon, lat, alt)
print('参考点位置-地固坐标系')
print(Xecef_ref)
print('\n')# 相机位置在ECEF坐标系中
Xecef_cam = np.array([ecef_x, ecef_y, ecef_z]) # 计算相机位置在ENU坐标系中的坐标
dXecef = Xecef_cam - Xecef_ref
print('dXecef')
print(dXecef)
print('\n')#Xenu_cam = np.dot(ecef_matrix.T, dXecef)
Xenu_cam = np.dot(dXecef, rot_ECEF2ENUV.T)
print('相机在ENU坐标中的位置')
print(Xenu_cam)
print('\n')# 计算相机的ENU坐标系中的姿态
DCM_enu = np.dot(ecef_matrix, rot_ECEF2ENUV.T)
print('相机在ENU坐标中姿态')
print(DCM_enu)
print('\n')运行结果
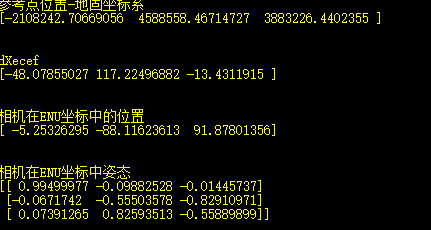
# 正确的位置和姿态
enu_x =-5.25326294611772
enu_y =-88.1162361244917
enu_z =91.8780135626621
enu_matrix = np.array([[0.994999772929298,-0.0988252823926444,-0.0144573659655384],[-0.067174196729575,-0.555035783385474,-0.829109707128924],[0.0739126454971252,0.825935132272315,-0.55889898739748]])
可以看到,转换正确
相关文章:
相机的位姿在地固坐标系ECEF和ENU坐标系的转换
在地球科学和导航领域,通常使用地心地固坐标系(ECEF,Earth-Centered, Earth-Fixed)和东北天坐标系(ENU,East-North-Up)来描述地球上的位置和姿态。如下图所示: 地心地固坐标ecef和…...

RFID技术助力汽车零配件装配产线,提升效率与准确性
随着科技的不断发展,越来越多的自动化设备被应用到汽车零配件装配产线中。其中,射频识别(Radio Frequency Identification,简称RFID)技术凭借其独特的优势,已经成为了这一领域的重要技术之一。本文将介绍RF…...

应用高分辨率 GAN 对扰动文档图像去扭曲的深度Python实践
1. 引言 随着技术的不断发展,图像处理在各种场景中的应用也变得越来越广泛。高分辨率 GAN (Generative Adversarial Network) 是近年来图像处理领域的热点技术,它能够生成极高分辨率的图像,与此同时,它也可以用于各种修复和增强任…...
)
【BASH】回顾与知识点梳理(二十六)
【BASH】回顾与知识点梳理 二十六 二十六. 二十一至二十五章知识点总结及练习26.1 总结26.2 模拟26.3 简答题 该系列目录 --> 【BASH】回顾与知识点梳理(目录) 二十六. 二十一至二十五章知识点总结及练习 26.1 总结 Linux 操作系统上面,…...

React下载文件的两种方式
React下载文件的两种方式 - 代码先锋网 不知道有用没用看着挺整齐 没试过 1、GET类型下载 download url > {const eleLink document.createElement(a);eleLink.style.display none;// eleLink.target "_blank"eleLink.href url;// eleLink.href record;d…...

python入门知识:分支结构
前言 嗨喽,大家好呀~这里是爱看美女的茜茜呐 1.内容导图 👇 👇 👇 更多精彩机密、教程,尽在下方,赶紧点击了解吧~ python资料、视频教程、代码、插件安装教程等我都准备好了,直接在文末名片自…...

DNS协议及其工作原理
DNS是域名系统(Domain Name System)的缩写,它是一种用于将域名转换为IP地址的分布式数据库系统。它是因特网的基石,能够使人们通过域名方便地访问互联网,而无需记住复杂的IP地址。 DNS的历史可以追溯到1983年…...

调用被fishhook的原函数
OC类如果通过runtime被hook了,可以通过逆序遍历方法列表的方式调用原方法。 那系统库的C函数被fish hook了该怎么办呢? 原理和OC类异曲同工,即通过系统函数dlopen()获取动态库,以动态库为参数通过系统函数dlsym()即可获取目标系统…...

java语言B/S架构云HIS医院信息系统源码【springboot】
医院云HIS全称为基于云计算的医疗卫生信息系统( Cloud- Based Healthcare Information System),是运用云计算、大数据、物联网等新兴信息技术,按照现代医疗卫生管理要求,在一定区域范围内以数字化形式提供医疗卫生行业数据收集、存储、传递、…...

go文件基本操作
一、文件读操作 文件内容如下: 水陆草木之花,可爱者甚蕃。 晋陶渊明独爱菊。自李唐来,世人甚爱牡丹。 予独爱莲之出淤泥而不染,濯清涟而不妖,中通外直,不蔓不枝,香远益清,亭亭净植…...

每日一学——应用层
以下是一份关于应用层协议的学习资料: DNS (Domain Name System):DNS是互联网上最常用的应用层协议之一,它将域名转换为对应的IP地址。你可以了解DNS的工作原理、域名解析过程和常见的DNS记录类型。 DHCP (Dynamic Host Configuration Proto…...

blender的快捷键记录
按键作用备注R旋转物体移动、旋转或缩放物体时,按下X、Y或Z键:按X、Y或Z轴方向移动、旋转或缩放S缩放物体G移动物体TAB键切换为编辑模式CTRL A弹出应用菜单物体模式旋转缩放后应用旋转与缩放,再进入编辑模式SHIFT 鼠标右键移动游标位置SHIF…...
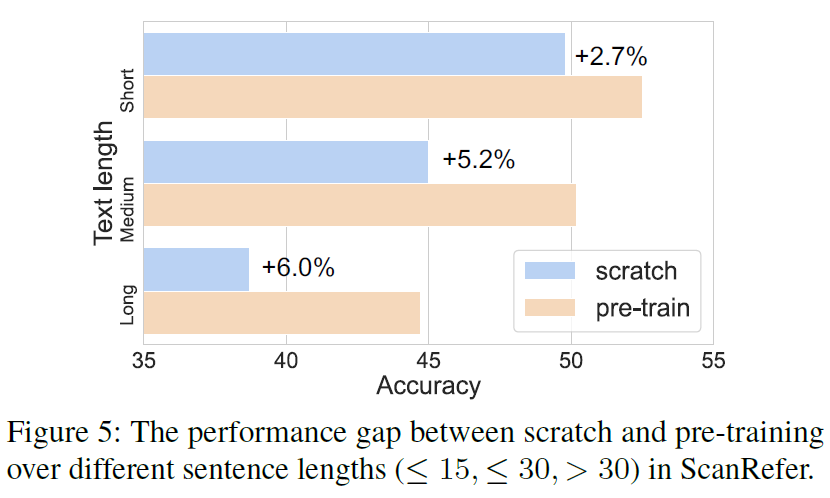
3D- vista:预训练的3D视觉和文本对齐Transformer
论文:https://arxiv.org/abs/2308.04352 代码: GitHub - 3d-vista/3D-VisTA: Official implementation of ICCV 2023 paper "3D-VisTA: Pre-trained Transformer for 3D Vision and Text Alignment" 摘要 三维视觉语言基础(3D- vl)是一个新兴领域&…...
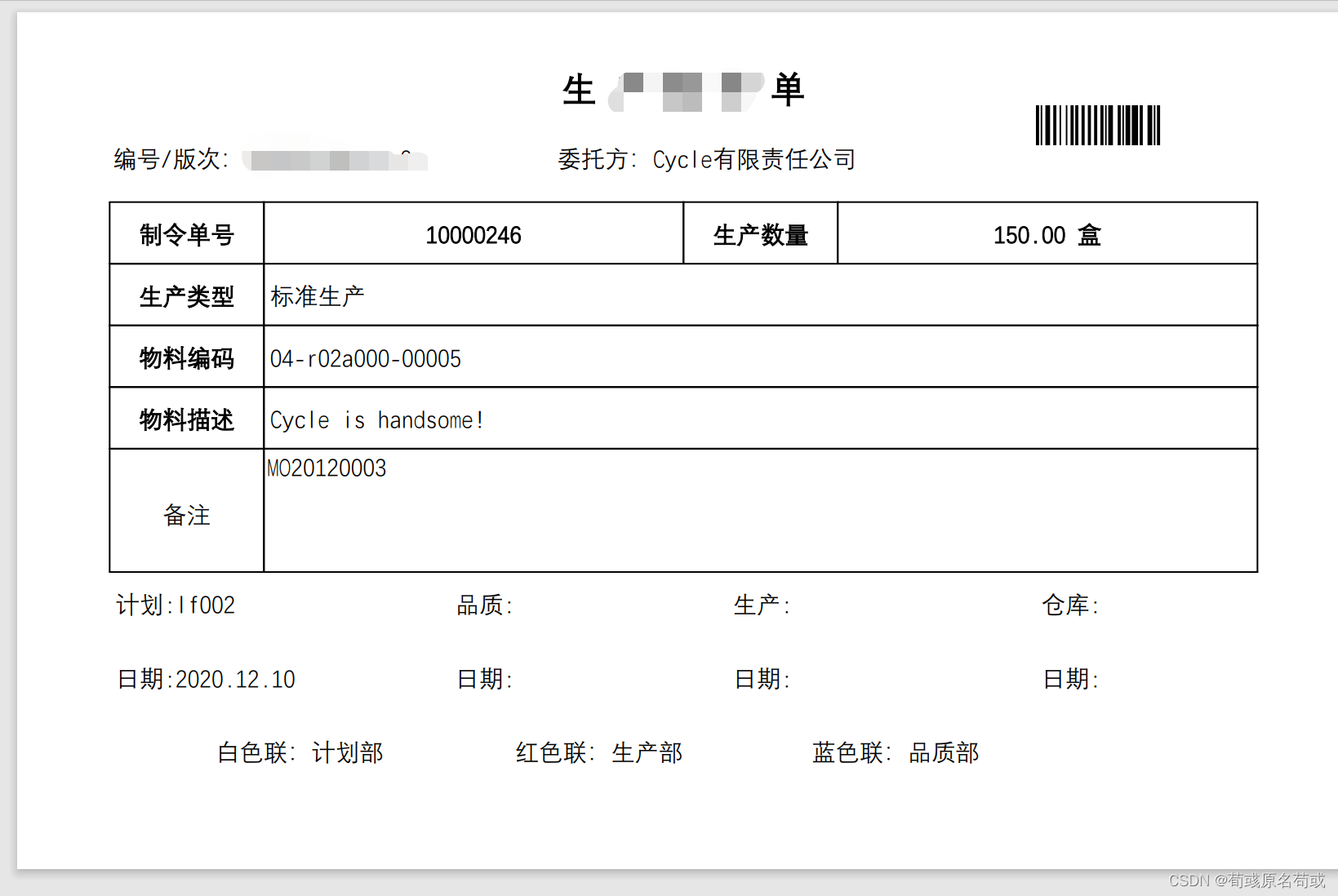
SAP ABAP 直接把内表转换成PDF格式(smartform的打印函数输出OTF格式数据)
直接上代码: REPORT zcycle055.DATA: lt_tab TYPE TABLE OF zpps001. DATA: ls_tab TYPE zpps001.ls_tab-werks 1001. ls_tab-gamng 150.00. ls_tab-gstrp 20201202. ls_tab-aufnr 000010000246. ls_tab-auart 标准生产. ls_tab-gltrp 20201205. ls_tab-matn…...
侯捷 C++ part2 兼谈对象模型笔记——7 reference、const、new/delete
7 reference、const、new/delete 7.1 reference x 是整数,占4字节;p 是指针占4字节(32位);r 代表x,那么r也是整数,占4字节 int x 0; int* p &x; // 地址和指针是互通的 int& r x;…...

C++学习笔记总结练习:primer 学习日志
文章目录 针对自己的引言学习内容c语言基础知识1.为什么要声明变量2.cout ,cin3.c 不容许一个函数定义嵌套到另一个函数的定义中。4.编译指令using5.c基本类型长度6.在定义常量时尽可能使用const 关键字而不用#define9.前缀递增符与后缀递增符的区别10.c中的cctype库11.c 中的s…...
发布一个开源的新闻api(整理后就开源)
目录 说明: 基础说明 其他说明: 通用接口: 登录: 注册: 更改密码(需要token) 更换头像(需要token) 获取用户列表(需要token): 上传文件(5000端口): 获取文件(5000端口)源码文件,db文件均不能获取: 验证token(需要token): 获取系统时间: 文件…...

3d max省时插件CG MAGIC功能中的材质参数可一键优化!
渲染的最终结果就是为了让渲染效果更加真实的体现。 对于一些操作上,可能还是费些时间,VRay可以说是在给材质做加法的路上越走越远,透明度、凹凸、反射等等参数细节越做越多。 对于材质参数调节的重要性大家都心里有数的。 VRay材质系统的每…...

什么是变量提升(hoisting)?它在JavaScript中是如何工作的?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 变量提升(Hoisting)⭐ 变量提升的示例:⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅&…...

.git内存清理方式
查看前15个大文件 git rev-list --objects --all | grep "$(git verify-pack -v .git/objects/pack/*.idx | sort -k 3 -n | tail -15 | awk {print$1})"删除文件夹(public/housimg文件夹目录) git filter-branch --tree-filter rm -rf publ…...

3步解锁鸣潮120帧:你的终极游戏体验优化指南
3步解锁鸣潮120帧:你的终极游戏体验优化指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 还在为《鸣潮》游戏中的60帧限制而烦恼吗?明明拥有强大的硬件配置,却无法充…...

DLSS Swapper终极指南:免费开源工具让游戏DLSS管理变得简单快速
DLSS Swapper终极指南:免费开源工具让游戏DLSS管理变得简单快速 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 如果你正在寻找一款能够智能管理游戏DLSS、FSR和XeSS文件的免费开源工具,那么DLS…...

AICoverGen终极指南:5分钟用AI制作专业级翻唱歌曲
AICoverGen终极指南:5分钟用AI制作专业级翻唱歌曲 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想不想让AI…...

基于MCP协议的AI Agent远程SSH安全操作实践指南
1. 项目概述与核心价值最近在折腾AI Agent的开发,发现一个挺有意思的现象:很多开发者都卡在了“如何让AI安全、可控地操作远程服务器”这一步。你可能会想到直接给AI一个SSH私钥,但这无异于把自家大门的钥匙扔给一个还在学习走路的机器人&…...

Switch便携投影底座DIY:3D打印与硬件改造实战指南
1. 项目概述:当Switch遇上投影,一场桌面上的大屏革命作为一个折腾过不少游戏机外设的玩家,我一直在想,有没有办法让Switch的“便携”属性再进化一步?官方底座接电视固然爽,但总被一根线缆束缚在客厅。直到我…...

基于Claude API构建AI代码生成工具:从API封装到工程化实践
1. 项目概述与核心价值最近在开发者社区里,一个名为ashish200729/claude-code-source-code的项目标题引起了不小的讨论。乍一看,这个标题很容易让人产生误解,以为这是某个知名AI模型的源代码被公开了。但作为一名在软件开发和开源领域摸爬滚打…...

AI Agent架构深度解析:从核心原理到工程实践
1. 项目概述:一次关于AI Agent的深度技术探险最近在GitHub上看到一个名为“tvytlx/ai-agent-deep-dive”的项目,光看标题就让人眼前一亮。这显然不是一个简单的“Hello World”式教程,而是一次对AI Agent(智能体)技术的…...

基于CircuitPython与加速度计的魔法9号球:嵌入式交互项目实践
1. 项目概述:当硬件遇上玄学,用代码打造你的专属“决策神器”在嵌入式开发的世界里,我们常常与传感器、显示屏和逻辑代码打交道,构建着一个个解决实际问题的智能设备。但谁说硬件项目就一定要严肃刻板?今天,…...

Docker容器MCP服务镜像:AI安全运维与自动化实践
1. 项目概述:一个为Docker容器提供MCP服务的镜像最近在折腾一些自动化工作流,发现很多工具都开始支持一种叫做MCP(Model Context Protocol)的协议。简单来说,MCP就像是一个标准化的“插座”,让各种AI模型&a…...

基于Arduino与加速度传感器的可穿戴智能徽章制作全解析
1. 项目概述:一个会“走路”的智能徽章几年前,当《Pokemon Go》风靡全球时,我注意到一个有趣的现象:深夜的公园里,总有一群玩家低头盯着手机屏幕,在昏暗的光线下穿梭。这固然是游戏的乐趣,但也带…...