C语言实例_解析GPS源数据
一、GPS数据格式介绍
GPS(全球定位系统)数据格式常见的是NMEA 0183格式,NMEA 0183格式是一种用于导航设备间传输数据的标准格式,定义了一套规范,使得不同厂商的设备可以通过串行通信接口(常见的是RS-232)进行数据交换。这个标准最初由美国航海电子协会(National Marine Electronics Association,简称NMEA)在1980年推出,并被广泛应用于全球的导航系统。
NMEA 0183格式的数据通常以ASCII字符流的形式传输,每条数据都以$开始,以回车符(\r)和换行符(\n)结束。数据被分为不同的消息类型,每个消息类型都有特定的字段和含义。
在导航中,最常见的NMEA 0183消息类型包括:
- GGA(Global Positioning System Fix Data):包含定位相关的信息,如纬度、经度、定位质量指示、使用卫星数量、水平定位精度因子等。
- GLL(Geographic Position – Latitude/Longitude):提供纬度、经度和时间信息。
- GSA(GNSS DOP and Active Satellites):包含定位模式、使用卫星编号和位置精度因子等信息。
- GSV(GNSS Satellites in View):提供可见卫星的信息,包括卫星编号、仰角、方位角和信噪比等。
- RMC(Recommended Minimum Specific GNSS Data):包含定位状态、纬度、经度、地面速度、地面航向等。
- VTG(Course Over Ground and Ground Speed):提供地面航向和速度信息。
- ZDA(Time and Date):包含UTC时间和日期信息。
这些消息类型涵盖了定位、导航和时间相关的数据,可以用于实时定位、航行导航以及时间同步等应用。
NMEA 0183格式的数据通常由GPS接收器、导航仪、自动驾驶系统等设备产生,并通过串口输出。其他设备可以通过读取串口数据,并按照NMEA 0183的规范解析数据。这样,不同设备之间就可以进行数据交换和共享,实现设备之间的互操作性。
随着技术的发展,新一代的GPS设备也开始采用更高级的数据格式,例如NMEA 2000。然而,由于广泛应用和兼容性的要求,NMEA 0183仍然被广泛支持,并被许多设备和导航系统所使用。

下面是支持NMEA 0183格式的GPS模块输出的定位数据:
$GNGGA,114955.000,2842.4158,N,11549.5439,E,1,05,3.8,54.8,M,0.0,M,,*4F
$GNGLL,2842.4158,N,11549.5439,E,114955.000,A,A*4D
$GPGSA,A,3,10,31,18,,,,,,,,,,5.7,3.8,4.2*37
$BDGSA,A,3,07,10,,,,,,,,,,,5.7,3.8,4.2*2A
$GPGSV,3,1,10,10,49,184,42,12,16,039,,14,54,341,,18,22,165,23*7B
$GPGSV,3,2,10,22,11,318,,25,51,055,,26,24,205,,29,13,110,*7C
$GPGSV,3,3,10,31,50,287,36,32,66,018,*7F
$BDGSV,1,1,04,03,,,07,05,,,29,07,79,246,33,10,52,232,19*62
$GNRMC,114955.000,A,2842.4158,N,11549.5439,E,0.00,44.25,061117,,,A*4D
$GNVTG,44.25,T,,M,0.00,N,0.00,K,A*14
$GNZDA,114955.000,06,11,2017,00,00*47
$GPTXT,01,01,01,ANTENNA OK*35
二、GPS字段含义
这段GPS数据是NMEA 0183格式的数据,它包含了不同类型的GPS消息,每个消息都有特定的含义和字段。
(1)$GNGGA,114955.000,2842.4158,N,11549.5439,E,1,05,3.8,54.8,M,0.0,M,*4F 这是GGA(Global Positioning System Fix Data)消息,包含了以下关键信息:
- 时间:11时49分55秒(UTC时间)
- 纬度:28度42.4158分北纬
- 经度:115度49.5439分东经
- 定位质量指示:1(表示定位有效)
- 使用卫星数量:5颗卫星
- HDOP(Horizontal Dilution of Precision)水平定位精度因子:3.8
- 海拔高度:54.8米
- 大地水准面高度:0.0米
(2)$GNGLL,2842.4158,N,11549.5439,E,114955.000,A,A*4D 这是GLL(Geographic Position – Latitude/Longitude)消息,包含了以下关键信息:
- 纬度:28度42.4158分北纬
- 经度:115度49.5439分东经
- 时间:11时49分55秒(UTC时间)
- 定位状态:A(表示定位有效)
- 导航模式指示:A(自主定位导航)
(3)$GPGSA,A,3,10,31,18,5.7,3.8,4.2*37 这是GSA(GNSS DOP and Active Satellites)消息,包含了以下关键信息:
- 定位模式:自主定位模式
- 定位类型:三维定位
- 使用卫星编号:10、31、18
- PDOP(Position Dilution of Precision)位置精度因子:5.7
- HDOP(Horizontal Dilution of Precision)水平定位精度因子:3.8
- VDOP(Vertical Dilution of Precision)垂直定位精度因子:4.2
(4)$BDGSA,A,3,07,10,5.7,3.8,4.2*2A 这是BDGSA(Beidou GNSS DOP and Active Satellites)消息,与GPGSA消息类似,但使用的是北斗导航系统的数据。
- 消息序号:这组消息是一共分为3个消息,这是第1个消息
- 可见卫星总数:10颗卫星
- 卫星编号、仰角、方位角和信噪比等信息
(5)$BDGSV,1,1,04,03,07,05,29,07,79,246,33,10,52,232,19*62 这是BDGSV(Beidou GNSS Satellites in View)消息,与GPGSV消息类似,但使用的是北斗导航系统的数据。
(6)$GNRMC,114955.000,A,2842.4158,N,11549.5439,E,0.00,44.25,061117,A*4D 这是RMC(Recommended Minimum Specific GNSS Data)消息,包含了以下关键信息:
- 时间:11时49分55秒(UTC时间)
- 定位状态:A(表示定位有效)
- 纬度:28度42.4158分北纬
- 经度:115度49.5439分东经
- 地面速度:0.00节
- 地面航向:44.25度
- 日期:06日11月17年
(7)$GNVTG,44.25,T,M,0.00,N,0.00,K,A*14 这是VTG(Course Over Ground and Ground Speed)消息,包含了以下关键信息:
- 地面航向:44.25度(真北参考)
- 地面速度:0.00节(节与海里/小时是相同的)
- 地面速度:0.00千米/小时
- 模式指示:A(自主定位导航模式)
(8)$GNZDA,114955.000,06,11,2017,00,00*47 这是ZDA(Time and Date)消息,包含了以下关键信息:
- UTC时间:11时49分55秒
- 日期:06日11月17年
- 本地时区偏移:00小时00分钟
(9)$GPTXT,01,01,01,ANTENNA OK*35 这是TXT(Text Transmission)消息,包含了以下关键信息:
- 文本内容:ANTENNA OK(表示天线状态良好)
这些消息提供了GPS设备的时间、位置、定位质量、可见卫星数量等信息。其中涉及到的字段包括时间(UTC时间)、纬度、经度、定位质量指示、使用卫星编号、定位精度因子、海拔高度、速度等。根据不同的应用需求,可以从这些数据中提取出需要的信息来进行处理和分析。
三、C语言解析数据代码
3.1 解析每个字段数据
以下是使用C语言解析NMEA 0183数据字段并将其打印到串口:
#include <stdio.h>
#include <string.h>// 函数声明
void parseNMEA(const char* sentence);
void printField(const char* field);int main() {// NMEA数据const char* data[] = {"$GNGGA,114955.000,2842.4158,N,11549.5439,E,1,05,3.8,54.8,M,0.0,M,,*4F","$GNGLL,2842.4158,N,11549.5439,E,114955.000,A,A*4D","$GPGSA,A,3,10,31,18,,,,,,,,,,5.7,3.8,4.2*37","$BDGSA,A,3,07,10,,,,,,,,,,,5.7,3.8,4.2*2A","$GPGSV,3,1,10,10,49,184,42,12,16,039,,14,54,341,,18,22,165,23*7B","$GPGSV,3,2,10,22,11,318,,25,51,055,,26,24,205,,29,13,110,*7C","$GPGSV,3,3,10,31,50,287,36,32,66,018,*7F","$BDGSV,1,1,04,03,,,07,05,,,29,07,79,246,33,10,52,232,19*62","$GNRMC,114955.000,A,2842.4158,N,11549.5439,E,0.00,44.25,061117,,,A*4D","$GNVTG,44.25,T,,M,0.00,N,0.00,K,A*14","$GNZDA,114955.000,06,11,2017,00,00*47","$GPTXT,01,01,01,ANTENNA OK*35"};int dataSize = sizeof(data) / sizeof(data[0]);// 解析并打印每个数据for (int i = 0; i < dataSize; i++) {parseNMEA(data[i]);}return 0;
}// 解析NMEA语句
void parseNMEA(const char* sentence) {const char* field;int count = 0;// 跳过$和逗号field = strchr(sentence, ',');if (field == NULL) {return;}field++;// 解析每个字段while (*field != '*') {printField(field);// 查找下一个逗号或结束符field = strchr(field, ',');if (field == NULL) {break;}field++;count++;}
}// 打印字段数据
void printField(const char* field) {char str[50];int len = 0;// 查找字段的长度while (field[len] != ',' && field[len] != '\0' && field[len] != '*') {len++;}// 复制字段数据到缓冲区strncpy(str, field, len);str[len] = '\0';// 打印字段数据到串口printf("%s\n", str);
}
3.2 解析定位数据
定义了一个名为GPSData的结构体,并将解析后的定位数据存储在该结构体的各个变量中:
#include <stdio.h>
#include <string.h>// 定义结构体
typedef struct {char time[10];char latitude[10];char longitude[11];int fixStatus;int satellites;float hdop;float altitude;
} GPSData;// 函数声明
void parseNMEA(const char* sentence, GPSData* gpsData);
void printGPSData(const GPSData* gpsData);int main() {// NMEA数据const char* data[] = {"$GNGGA,114955.000,2842.4158,N,11549.5439,E,1,05,3.8,54.8,M,0.0,M,,*4F","$GNGLL,2842.4158,N,11549.5439,E,114955.000,A,A*4D","$GPGSA,A,3,10,31,18,,,,,,,,,,5.7,3.8,4.2*37","$BDGSA,A,3,07,10,,,,,,,,,,,5.7,3.8,4.2*2A","$GPGSV,3,1,10,10,49,184,42,12,16,039,,14,54,341,,18,22,165,23*7B","$GPGSV,3,2,10,22,11,318,,25,51,055,,26,24,205,,29,13,110,*7C","$GPGSV,3,3,10,31,50,287,36,32,66,018,*7F","$BDGSV,1,1,04,03,,,07,05,,,29,07,79,246,33,10,52,232,19*62","$GNRMC,114955.000,A,2842.4158,N,11549.5439,E,0.00,44.25,061117,,,A*4D","$GNVTG,44.25,T,,M,0.00,N,0.00,K,A*14","$GNZDA,114955.000,06,11,2017,00,00*47","$GPTXT,01,01,01,ANTENNA OK*35"};int dataSize = sizeof(data) / sizeof(data[0]);// 解析并打印每个数据for (int i = 0; i < dataSize; i++) {GPSData gpsData;parseNMEA(data[i], &gpsData);printGPSData(&gpsData);}return 0;
}// 解析NMEA语句并存储到结构体中
void parseNMEA(const char* sentence, GPSData* gpsData) {const char* field;int count = 0;// 跳过$和逗号field = strchr(sentence, ',');if (field == NULL) {return;}field++;// 解析每个字段while (*field != '*') {switch (count) {case 0:strncpy(gpsData->time, field, 6);gpsData->time[6] = '\0';break;case 1:strncpy(gpsData->latitude, field, 9);gpsData->latitude[9] = '\0';break;case 2:strncpy(gpsData->longitude, field, 10);gpsData->longitude[10] = '\0';break;case 6:sscanf(field, "%d", &gpsData->fixStatus);break;case 7:sscanf(field, "%d", &gpsData->satellites);break;case 8:sscanf(field, "%f", &gpsData->hdop);break;case 9:sscanf(field, "%f", &gpsData->altitude);break;default:break;}// 查找下一个逗号或结束符field = strchr(field, ',');if (field == NULL) {break;}field++;count++;}
}// 打印GPS数据到串口
void printGPSData(const GPSData* gpsData) {printf("Time: %s\n", gpsData->time);printf("Latitude: %s\n", gpsData->latitude);printf("Longitude: %s\n", gpsData->longitude);printf("Fix Status: %d\n", gpsData->fixStatus);printf("Satellites: %d\n", gpsData->satellites);printf("HDOP: %.1f\n", gpsData->hdop);printf("Altitude: %.1f meters\n", gpsData->altitude);printf("\n");
}
这段代码会解析NMEA 0183格式的数据,并将解析的结果存储在GPSData结构体的对应变量中。使用printGPSData函数将数据打印到串口。
相关文章:
C语言实例_解析GPS源数据
一、GPS数据格式介绍 GPS(全球定位系统)数据格式常见的是NMEA 0183格式,NMEA 0183格式是一种用于导航设备间传输数据的标准格式,定义了一套规范,使得不同厂商的设备可以通过串行通信接口(常见的是RS-232&a…...
LVS+Keepalived
Keepalived概述: keepalived软件 就是通过vrrp协议实现高可用功能 vrrp通信原理: vrrp就是虚拟路由冗余协议,它的出现就是为了解决静态路由的单点故障vrrp是通过一种竞选的一种协议机制将路由交给某台vrrp路由器vrrp用ip多播的方式【多播地…...

uni-app根据经纬度逆解析详细地址
uni-app中的getLocation()方法可以获取到用户当前的地理位置(经纬度)、速度。 但是返回参数中的address在app中才会显示,小程序中不会显示,所以我们需要进行逆解析其地址,解析出它的地址信息。 1.首先要在腾讯位置服务…...
【数据结构】吃透单链表!!!(详细解析~)
目录 前言:一.顺序表的缺陷 && 介绍链表1.顺序表的缺陷2.介绍链表(1)链表的概念(2)链表的结构(3)链表的功能 二.单链表的实现1.创建节点的结构2.头文件函数的声明3.函数的实现ÿ…...
Linux 安全技术和防火墙
目录 1 安全技术 2 防火墙 2.1 防火墙的分类 2.1.1 包过滤防火墙 2.1.2 应用层防火墙 3 Linux 防火墙的基本认识 3.1 iptables & netfilter 3.2 四表五链 4 iptables 4.2 数据包的常见控制类型 4.3 实际操作 4.3.1 加新的防火墙规则 4.3.2 查看规则表 4.3.…...
Mac 开发 Tang Nano FPGA 指南(使用终端和使用 VS Code 和插件,适用所有 Gowin FPGA)
最近收到了一个 Tang nano 9K FPGA开发板,就想借此机会研究一下。 官方文档里介绍如果想使用高云的 FPGA,就需要使用 GOWIN IDE,但是需要申请 license 提交一堆资料,我是别人送的就不太方便让别人弄。加上 IDE 其实并不是很适合学…...

基于深度学习的铁路异物侵限检测算法研究_整体认知感觉欠点意思,但是有一个新的变形卷积-Octave 卷积
相比于其他的交通运输方式,铁路运输具有准时性高、连续性强、速度快、运输量大、运输成本低以及安全可靠等优点。同时由于国家高速铁路网络建设的不断推进,铁路运输逐渐成为我国客运与货运的主要运输方式。虽然铁路运输为人们出行和货物运输带来的极大的…...
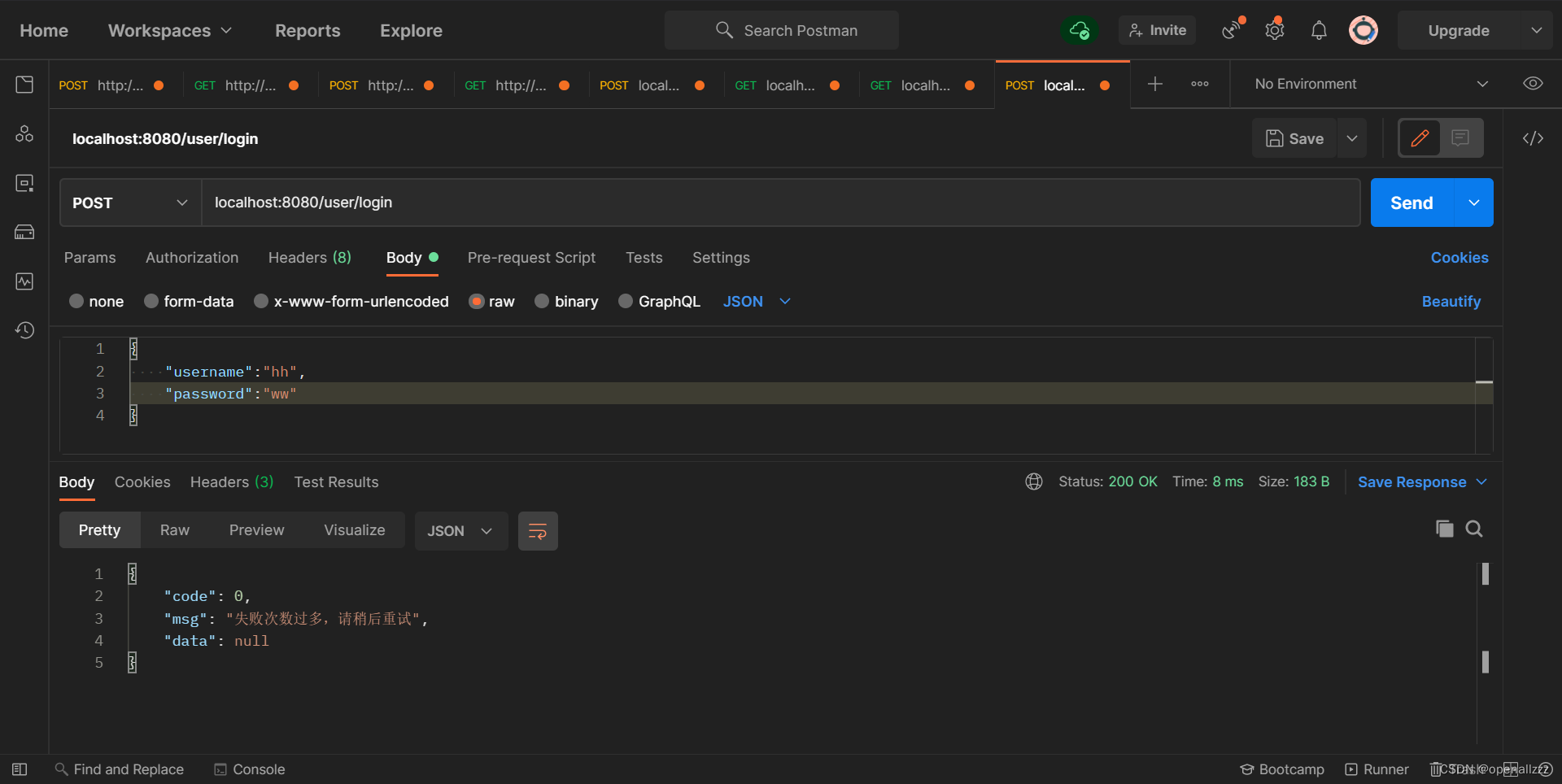
Spring项目使用Redis限制用户登录失败的次数以及暂时锁定用户登录权限
文章目录 背景环境代码实现0. 项目结构图(供参考)1. 数据库中的表(供参考)2. 依赖(pom.xml)3. 配置文件(application.yml)4. 配置文件(application-dev.yml)5…...

2023.8 - java - 变量类型
在Java语言中,所有的变量在使用前必须声明。声明变量的基本格式如下: type identifier [ value][, identifier [ value] ...] ; 格式说明: type -- 数据类型。identifier -- 是变量名,可以使用逗号 , 隔开来声明多个同类型变量…...

【Kubernetes】Kubernetes的Pod控制器
Pod控制器 一、Pod 控制器的概念1. Pod 控制器及其功用2. Pod 控制器有多种类型2.1 ReplicaSet2.2 Deployment2.3 DaemonSet2.4 StatefulSet2.5 Job2.6 Cronjob 3. Pod 与控制器之间的关系 二、Pod 控制器的使用1. Deployment2. SatefulSet2.1 为什么要有headless?2…...
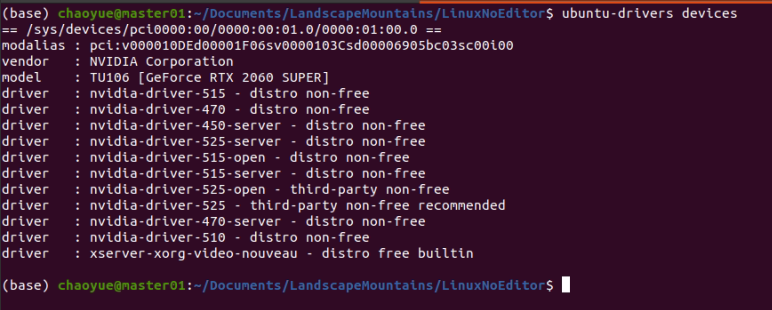
Ubuntu20.04安装Nvidia显卡驱动教程
1、禁用nouveau 1、创建文件,如果没有下载vim编辑器,将vim换成gedit即可 $ sudo vim /etc/modprobe.d/blacklist-nouveau.conf 2、在文件中插入以下内容,将nouveau加入黑名单,默认不开启 blacklist nouveau options nouveau m…...
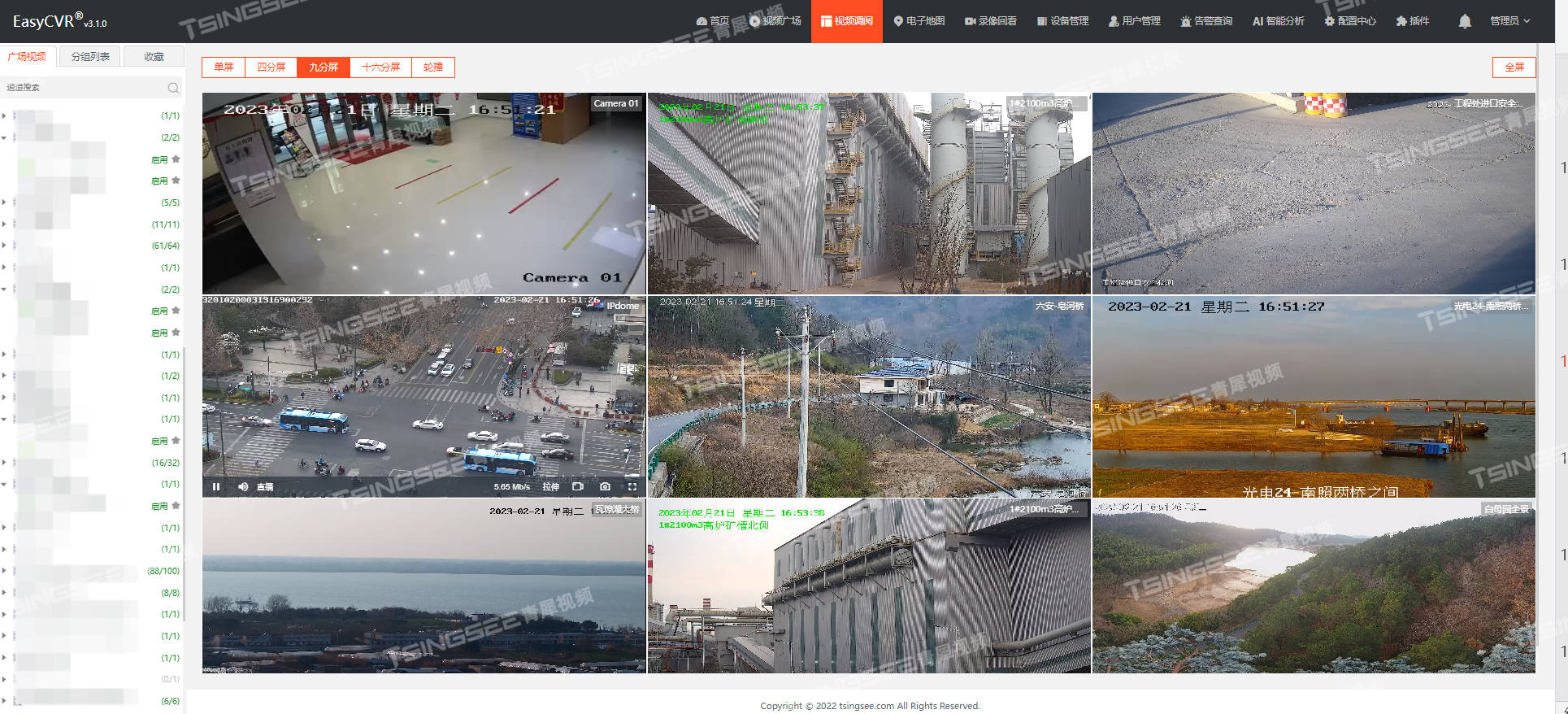
视频汇聚/视频云存储/视频监控管理平台EasyCVR添加萤石云设备详细操作来啦!
安防视频监控/视频集中存储/云存储/磁盘阵列EasyCVR平台可拓展性强、视频能力灵活、部署轻快,可支持的主流标准协议有国标GB28181、RTSP/Onvif、RTMP等,以及支持厂家私有协议与SDK接入,包括海康Ehome、海大宇等设备的SDK等。平台既具备传统安…...
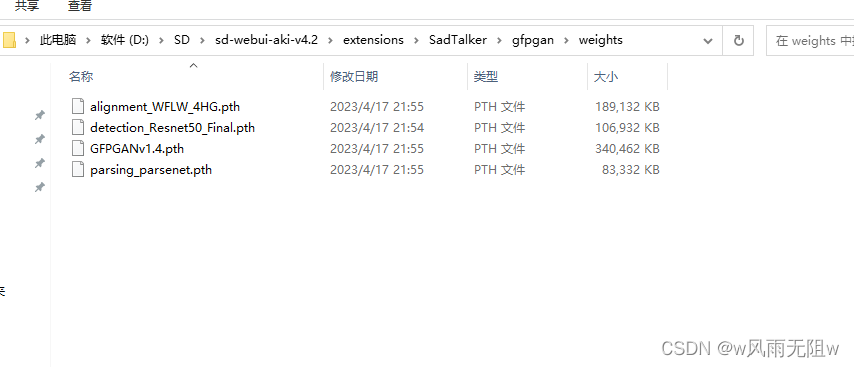
AI 绘画Stable Diffusion 研究(十二)SD数字人制作工具SadTlaker插件安装教程
免责声明: 本案例所用安装包免费提供,无任何盈利目的。 大家好,我是风雨无阻。 想必大家经常看到,无论是在产品营销还是品牌推广时,很多人经常以数字人的方式来为自己创造财富。而市面上的数字人收费都比较昂贵,少则几…...
数据结构——链表详解
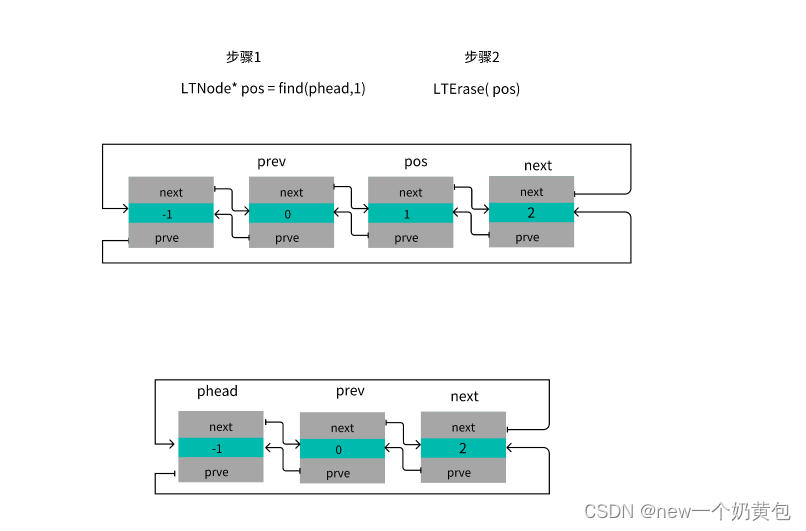
链表 文章目录 链表前言认识链表单链表结构图带头单循环链表结构图双向循环链表结构图带头双向循环链表结构图 链表特点 链表实现(带头双向循环链表实现)链表结构体(1) 新建头节点(2) 建立新节点(3)尾部插入节点(4)删除节点(5)头部插入节点(6) 头删节点(7) 寻找节点(8) pos位置…...
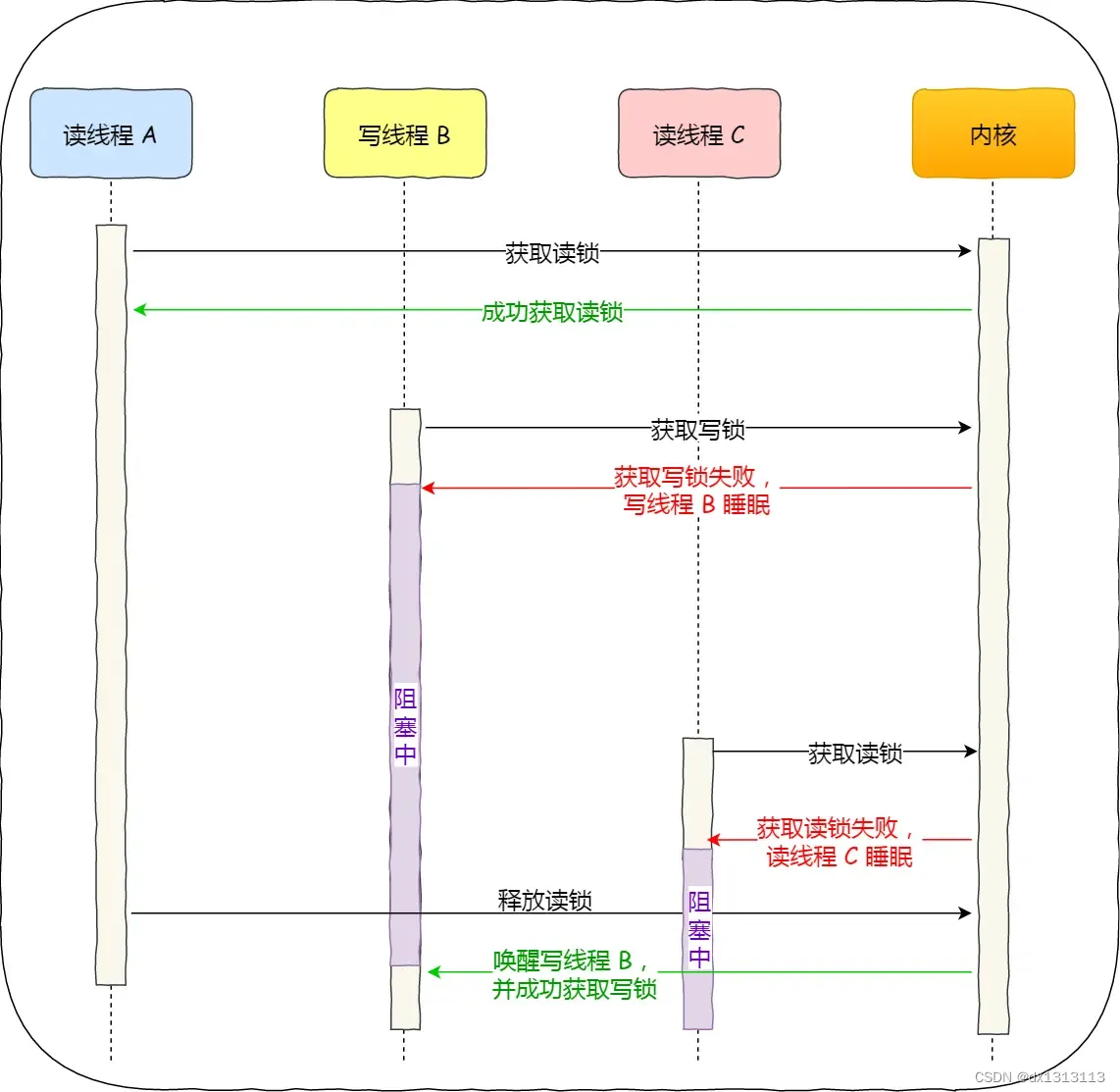
(学习笔记-进程管理)什么是悲观锁、乐观锁?
互斥锁与自旋锁 最底层的两种就是 [互斥锁和自旋锁],有很多高级的锁都是基于它们实现的。可以认为它们是各种锁的地基,所以我们必须清楚它们之间的区别和应用。 加锁的目的就是保证共享资源在任意时间内,只有一个线程访问,这样就…...
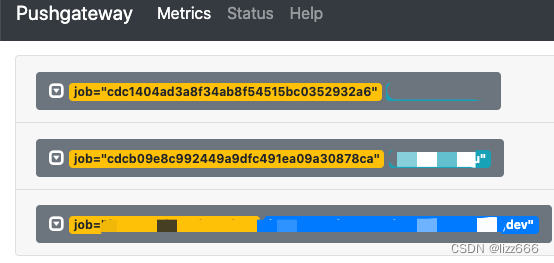
actuator/prometheus使用pushgateway上传jvm监控数据
场景 准备 prometheus已经部署pushgateway服务,访问{pushgateway.server:9091}可以看到面板 实现 基于springboot引入支持组件,版本可以 <!--监控检查--><dependency><groupId>org.springframework.boot</groupId><artifa…...
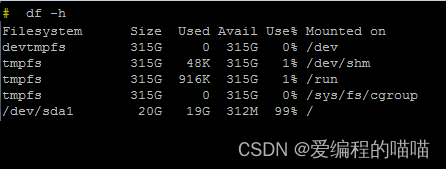
Linux设置临时目录路径的解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的…...
19-普通组件的注册使用
普通组件的注册使用-局部注册 一. 组件注册的两种方式:1.局部注册:只能在注册的组件内使用 (1) 创建 vue 文件(单文件组件) (2) 在使用的组件内导入,并注册 components:{ 组件名: 组件对象 } // 导入需要注册的组件 import 组件对象 from.vue文件路径 import HmHeader from ./…...

Java基础篇:抽象类与接口
1、抽象类和接口的定义: (1)抽象类主要用来抽取子类的通用特性,作为子类的模板,它不能被实例化,只能被用作为子类的超类。 (2)接口是抽象方法的集合,声明了一系列的方法…...

面对对象编程范式
本文是阅读《设计模式之美》的总结和心得,跳过了书中对面试和工作用处不大或不多的知识点,总结总共分为三章,分别是面对对象编程范式、设计原则和设计模式 现如今,编程范式存在三种,它们分别是面向对象编程、面向过程编…...

Vigil与其他监控工具集成:构建全方位监控体系的3种方案
Vigil与其他监控工具集成:构建全方位监控体系的3种方案 【免费下载链接】vigil 🚦 Microservices Status Page. Monitors a distributed infrastructure and sends alerts (Slack, SMS, etc.). 项目地址: https://gitcode.com/gh_mirrors/vig/vigil …...

动态路由协议与BGP路径属性:网络工程师的核心必修课
1. 从“路标”到“地图”:动态路由协议的核心价值 在网络世界里,路由器就像一个个十字路口的交通警察。如果每个路口都需要手动设置去往所有目的地的路牌,那不仅工作量巨大,一旦某条路临时施工或封闭,整个城市的交通都…...

大语言模型角色扮演技术:从原理到实践的完整指南
1. 项目概述:当大语言模型学会“扮演”角色最近在GitHub上看到一个挺有意思的项目,叫“awesome-llm-role-playing-with-persona”。光看名字,你大概能猜到它和大型语言模型以及角色扮演有关。简单来说,这个项目整理了一个资源列表…...

别再手动整理PDF了!用Zotero+坚果云打造你的免费文献同步工作流
Zotero与坚果云联动:构建无缝文献管理生态系统的终极指南 科研工作者和学生群体常面临一个普遍困境:如何在多台设备间高效同步和管理海量文献资料?传统的手动复制粘贴或依赖收费云服务不仅效率低下,还存在版本混乱的风险。本文将深…...

MVT矢量瓦片实战避坑指南:从配置到渲染的进阶解析
1. MVT矢量瓦片基础概念与核心优势 第一次接触MVT(Mapbox Vector Tile)矢量瓦片时,我和大多数开发者一样困惑:为什么不用传统的栅格瓦片?直到在某次地图项目中遇到动态样式调整需求时才恍然大悟。MVT本质上是将地理数据…...
)
别再只调API了!手把手教你用C#的PrintDocument类搞定小票打印(附完整源码)
别再只调API了!手把手教你用C#的PrintDocument类搞定小票打印(附完整源码) 在零售、餐饮等行业的软件开发中,小票打印功能几乎是标配。很多开发者习惯性地寻找第三方库或现成的报表控件,却忽略了.NET Framework中强大的…...

AI大模型产品经理零基础到进阶学习路线图,AI产品经理:不只是懂算法,更需AI思维!
AI产品经理区别于普通产品经理的地方,不止在懂得AI算法,更重要的是具有AI思维。 人工智能产品设计要以操作极度简单为标准,但是前端的简单代表后端的复杂,系统越复杂,才能越智能。 同样,人工智能的发展依赖…...

LaTeX2Word-Equation终极指南:打破数学公式编辑的次元壁
LaTeX2Word-Equation终极指南:打破数学公式编辑的次元壁 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 在学术写作和技术文档创作的…...
中南大学湘雅二医院肖煜东教授等团队:基于CT放射组学的机器学习识别肝细胞癌瘤内纤维化及其潜在血管生成)
Radiology(IF=15.2)中南大学湘雅二医院肖煜东教授等团队:基于CT放射组学的机器学习识别肝细胞癌瘤内纤维化及其潜在血管生成
01文献学习今天分享的文献是由中南大学湘雅二医院肖煜东教授等团队于2026年5月在放射学领域顶刊《Radiology》(中科院1区top,IF15.2)上发表的研究“CT Radiomics-based Machine Learning to Identify Intratumoral Fibrosis and Underlying A…...

猫抓Cat-Catch深度解析:浏览器资源嗅探的7大技术突破与实战指南
猫抓Cat-Catch深度解析:浏览器资源嗅探的7大技术突破与实战指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在当今流媒体主导的网络…...