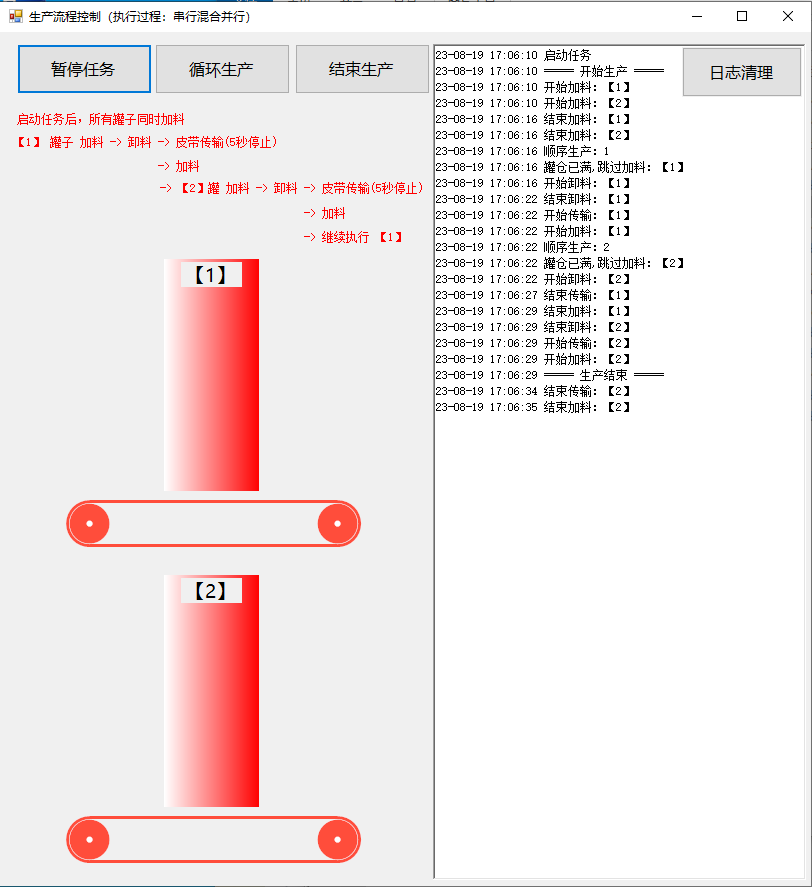
C#生产流程控制(串行,并行混合执行)
开源框架CsGo
https://gitee.com/hamasm/CsGo?_from=gitee_search
文档资料:
https://blog.csdn.net/aa2528877987/article/details/132139337
实现效果
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 |
|
相关文章:
C#生产流程控制(串行,并行混合执行)
开源框架CsGo https://gitee.com/hamasm/CsGo?_fromgitee_search 文档资料: https://blog.csdn.net/aa2528877987/article/details/132139337 实现效果 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37…...
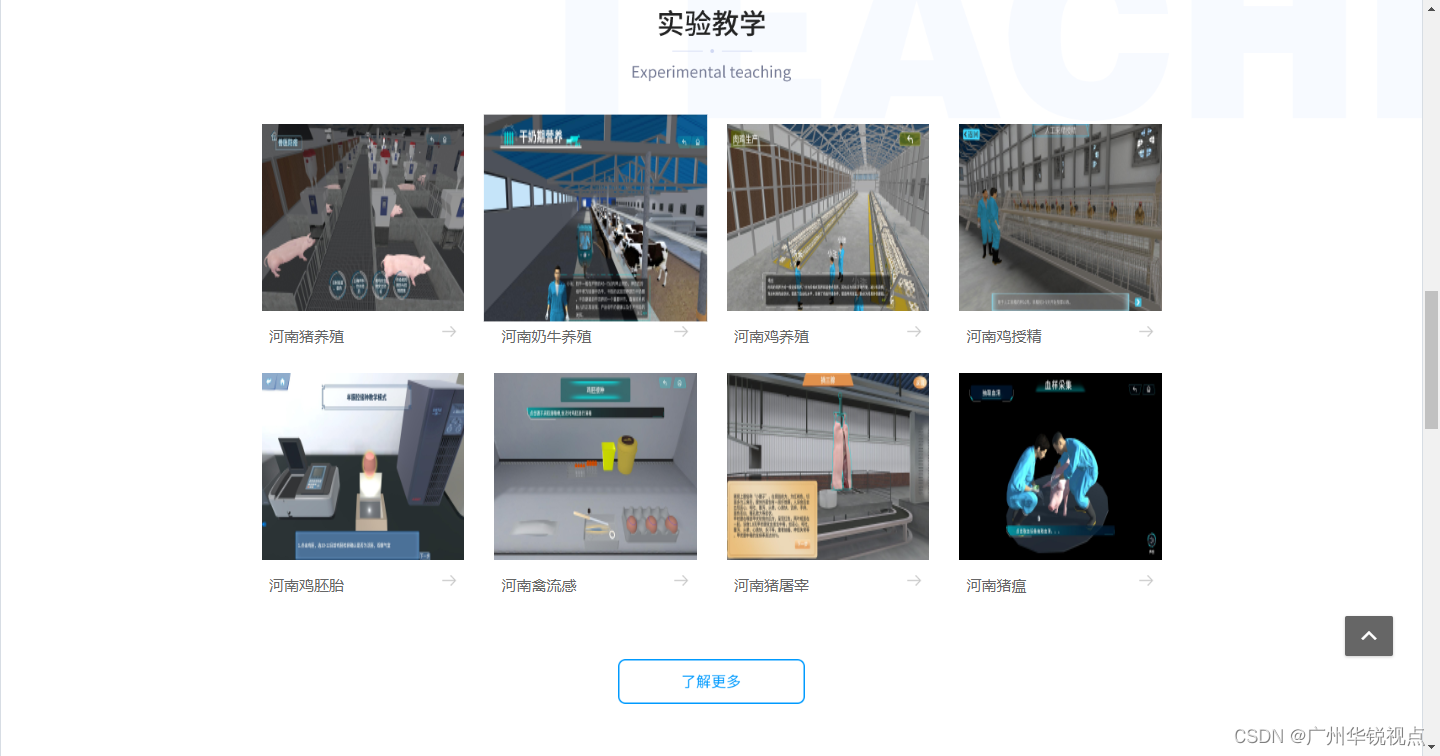
【广州华锐视点】VR线上教学资源平台提供定制化虚拟现实学习内容
虚拟现实(VR)技术的出现为我们提供了一种全新的在线教学方式。由广州华锐视点开发的VR线上教学资源平台,作为一个综合性的学习工具,正在教育领域迅速发展,并被越来越多的教育机构和学生所接受。那么,VR线上…...
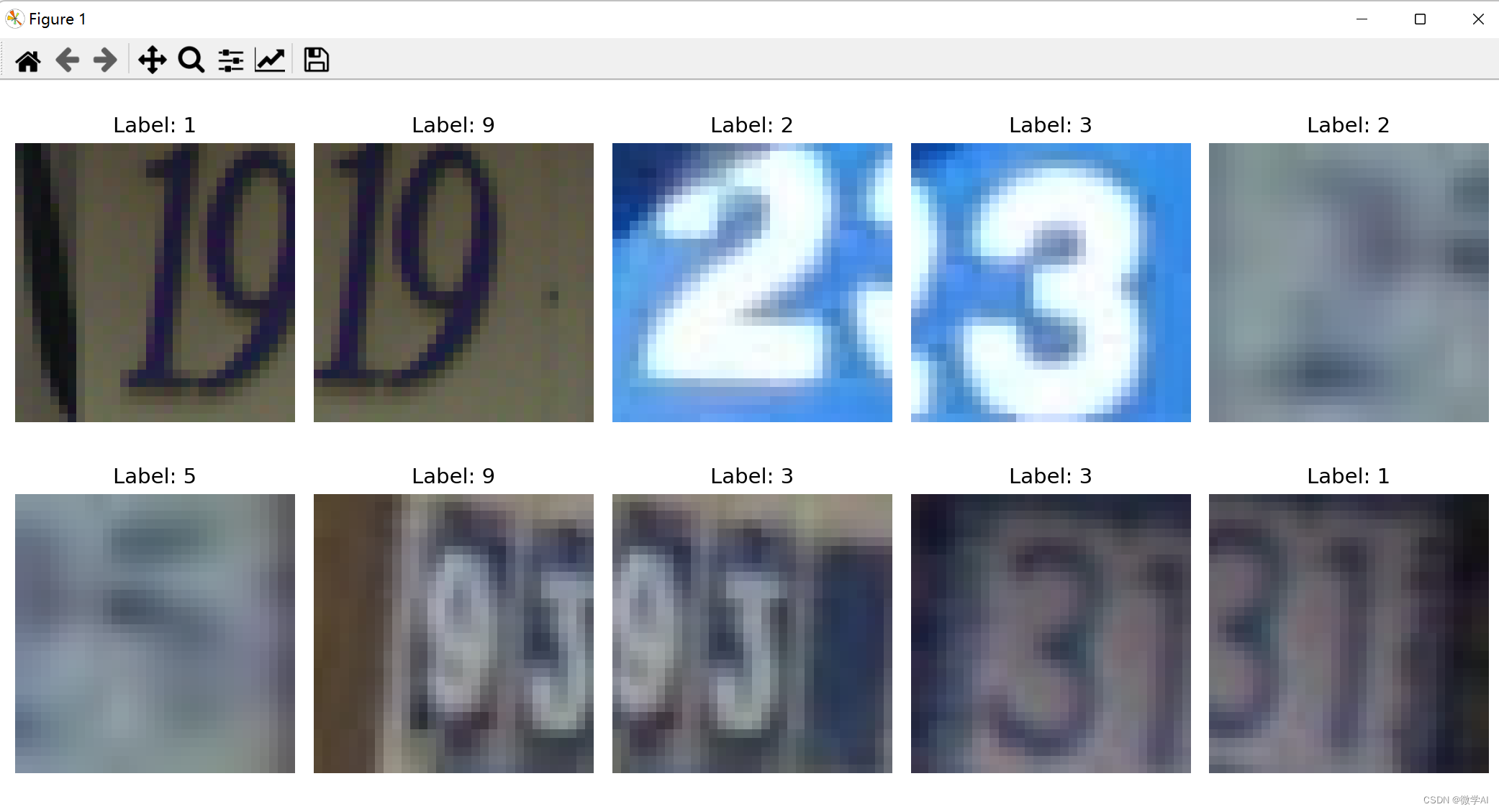
计算机视觉的应用11-基于pytorch框架的卷积神经网络与注意力机制对街道房屋号码的识别应用
大家好,我是微学AI,今天给大家介绍一下计算机视觉的应用11-基于pytorch框架的卷积神经网络与注意力机制对街道房屋号码的识别应用,本文我们借助PyTorch,快速构建和训练卷积神经网络(CNN)等模型,…...

正则表达式:学习使用正则表达式提取网页中的目标数据
使用正则表达式提取网页中的目标数据主要有以下几个步骤: 获取网页内容:首先,你需要使用Python的库(如requests)获取网页的HTML内容。 构建正则表达式:根据你想要提取的目标数据的特征,构建相应…...

最长重复子数组(力扣)动态规划 JAVA
给两个整数数组 nums1 和 nums2 ,返回 两个数组中 公共的 、长度最长的子数组的长度 。 示例 1: 输入:nums1 [1,2,3,2,1], nums2 [3,2,1,4,7] 输出:3 解释:长度最长的公共子数组是 [3,2,1] 。 示例 2: 输…...
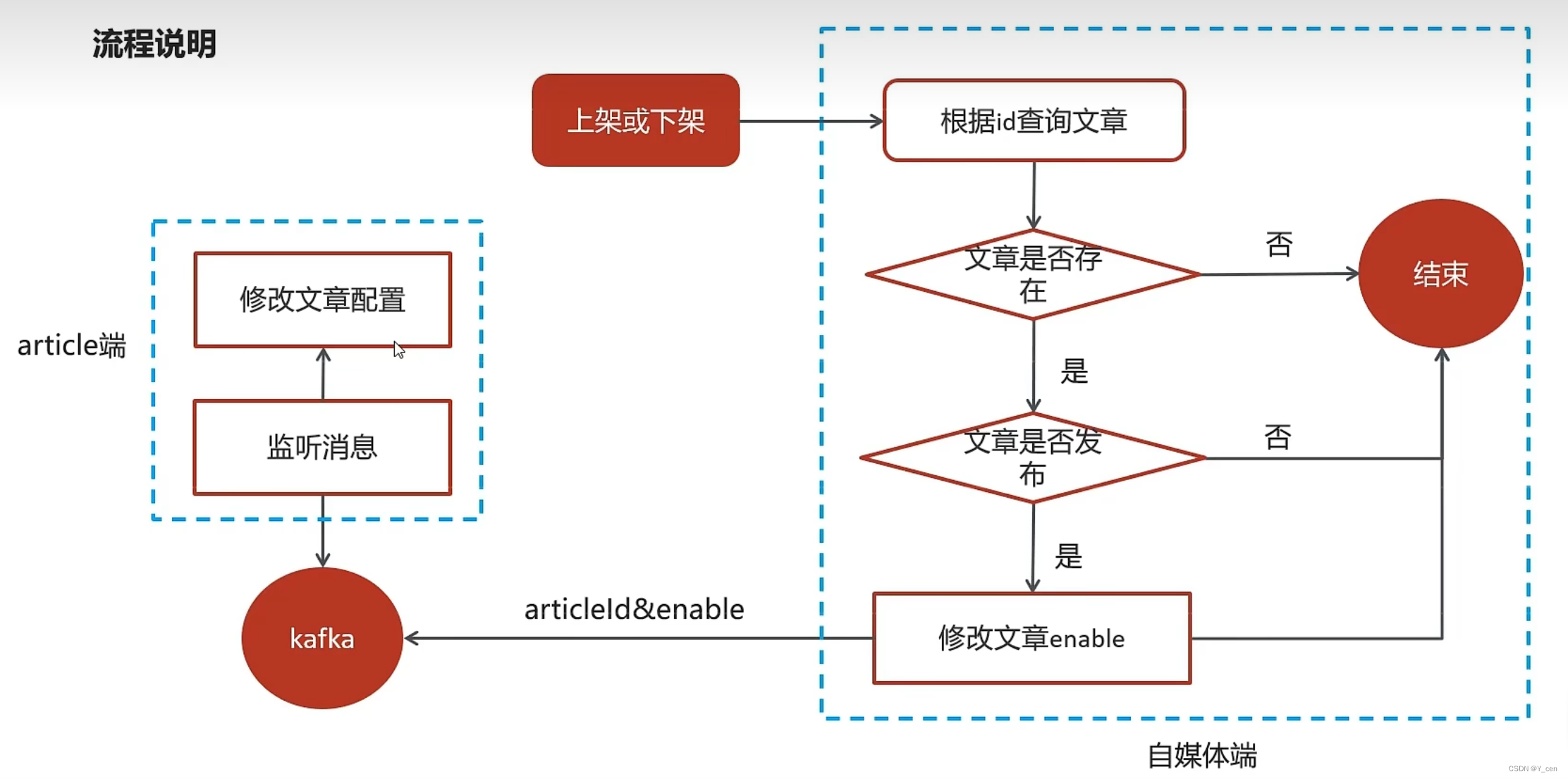
JavaWeb_LeadNews_Day6-Kafka
JavaWeb_LeadNews_Day6-Kafka Kafka概述安装配置kafka入门kafka高可用方案kafka详解生产者同步异步发送消息生产者参数配置消费者同步异步提交偏移量 SpringBoot集成kafka 自媒体文章上下架实现思路具体实现 来源Gitee Kafka 概述 对比 选择 介绍 producer: 发布消息的对象称…...

ATTCK覆盖度97.1%!360终端安全管理系统获赛可达认证
近日,国际知名第三方网络安全检测服务机构——赛可达实验室(SKD Labs)发布最新测试报告,360终端安全管理系统以ATT&CK V12框架攻击技术覆盖面377个、覆盖度97.1%,勒索病毒、挖矿病毒检出率100%,误报率0…...
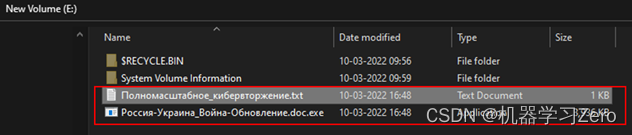
透视俄乌网络战之一:数据擦除软件
数据擦除破坏 1. WhisperGate2. HermeticWiper3. IsaacWiper4. WhisperKill5. CaddyWiper6. DoubleZero7. AcidRain8. RURansom 数据是政府、社会和企业组织运行的关键要素。数据擦除软件可以在不留任何痕迹的情况下擦除数据并阻止操作系统恢复摧,达到摧毁或目标系统…...
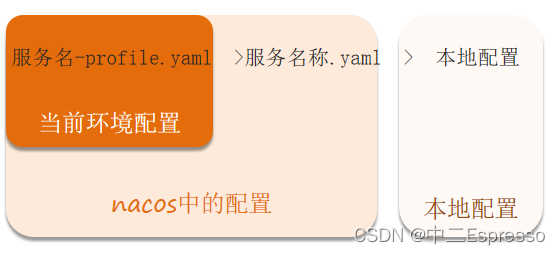
微服务中间件--Nacos
Nacos 1. Nacos入门a.服务注册到Nacosb.Nacos服务分级存储模型c.NacosRule负载均衡d.服务实例的权重设置e.环境隔离 - namespacef.Nacos和Eureka的对比 2. Nacos配置管理a.统一配置管理b.配置热更新c.多环境配置共享 1. Nacos入门 Nacos是阿里巴巴的产品,现在是Spr…...

驱动开发点亮led灯
头文件 #ifndef __HEAD_H__ #define __HEAD_H__#define PHY_LED_MODER 0X50006000 #define PHY_LED_ODR 0X50006014 #define PHY_LED_RCC 0X50000A28 #define PHY_LED_FMODER 0X50007000 #define PHY_LED_FODR 0X50007014#endif驱动代码 #include <linux/init.h> #incl…...

回归预测 | MATLAB实现IPSO-SVM改进粒子群优化算法优化支持向量机多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现IPSO-SVM改进粒子群优化算法优化支持向量机多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现IPSO-SVM改进粒子群优化算法优化支持向量机多输入单输出回归预测(多指标,多图…...
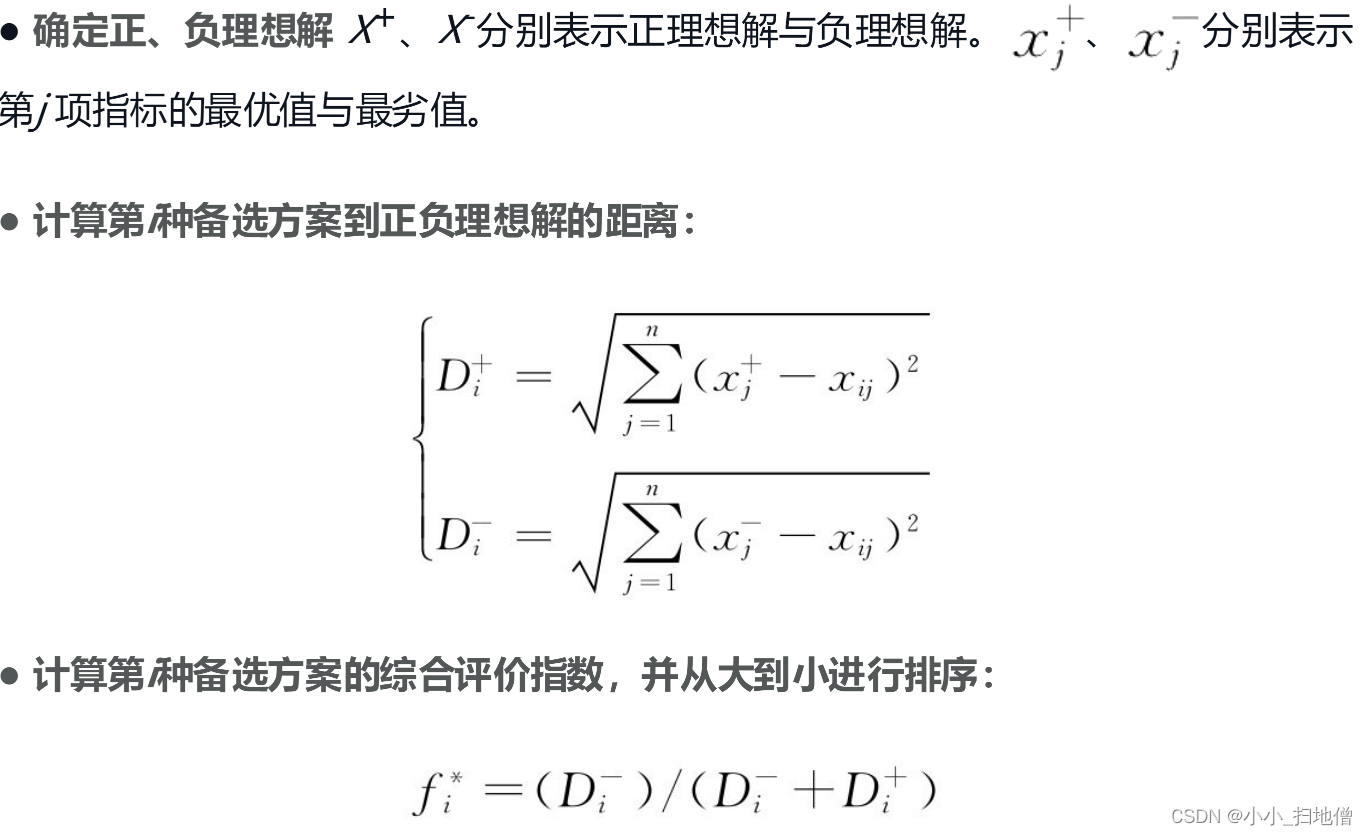
数学建模之“TOPSIS数学模型”原理和代码详解
一、简介 TOPSIS(Technique for Order Preference by Similarity to Ideal Solution)是一种多准则决策分析方法,用于解决多个候选方案之间的排序和选择问题。它基于一种数学模型,通过比较每个候选方案与理想解和负理想解之间的相…...
threejs使用gui改变相机的参数
调节相机远近角度 定义相机的配置: const cameraConfg reactive({ fov: 45 }) gui中加入调节fov的方法 const gui new dat.GUI();const cameraFolder gui.addFolder("相机属性设置");cameraFolder.add(cameraConfg, "fov", 0, 100).name(…...
计算机竞赛 图像识别-人脸识别与疲劳检测 - python opencv
文章目录 0 前言1 课题背景2 Dlib人脸识别2.1 简介2.2 Dlib优点2.3 相关代码2.4 人脸数据库2.5 人脸录入加识别效果 3 疲劳检测算法3.1 眼睛检测算法3.3 点头检测算法 4 PyQt54.1 简介4.2相关界面代码 5 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是…...
PHP8的字符串操作3-PHP8知识详解
今天继续分享字符串的操作,前面说到了字符串的去除空格和特殊字符,获取字符串的长度,截取字符串、检索字符串。 今天继续分享字符串的其他操作。如:替换字符串、分割和合成字符串。 5、替换字符串 替换字符串就是对指定字符串中…...

Unity VR:XR Interaction Toolkit 输入系统(Input System):获取手柄的输入
文章目录 📕教程说明📕Input System 和 XR Input Subsystem(推荐 Input System)📕Input Action Asset⭐Actions Maps⭐Actions⭐Action Properties🔍Action Type (Value, Button, Pass through) ⭐Binding …...

智慧工地一体化云平台源码:监管端、工地端、危大工程、智慧大屏、物联网、塔机、吊钩、升降机
智慧工地解决方案依托计算机技术、物联网、云计算、大数据、人工智能、VR&AR等技术相结合,为工程项目管理提供先进技术手段,构建工地现场智能监控和控制体系,弥补传统方法在监管中的缺陷,最终实现项目对人、机、料、法、环的全…...

C# 表达式体方法 C#算阶乘
//表达式体方法private int Add(int a, int b) > a b;[Fact]public void Test(){var result1 Factorial(1);//1var result2 Factorial(2);//2var result3 Factorial(3);//6var result4 Factorial(4);//24var result5 Factorial(5);//120var result6 Add(100, 200);//…...

互联网发展历程:保护与隔离,防火墙的安全壁垒
互联网的快速发展,不仅带来了便利和连接,也引发了越来越多的安全威胁。在数字时代,保护数据和网络安全变得尤为重要。然而,在早期的网络中,安全问题常常让人担忧。 安全问题的困扰:网络威胁日益增加 随着互…...
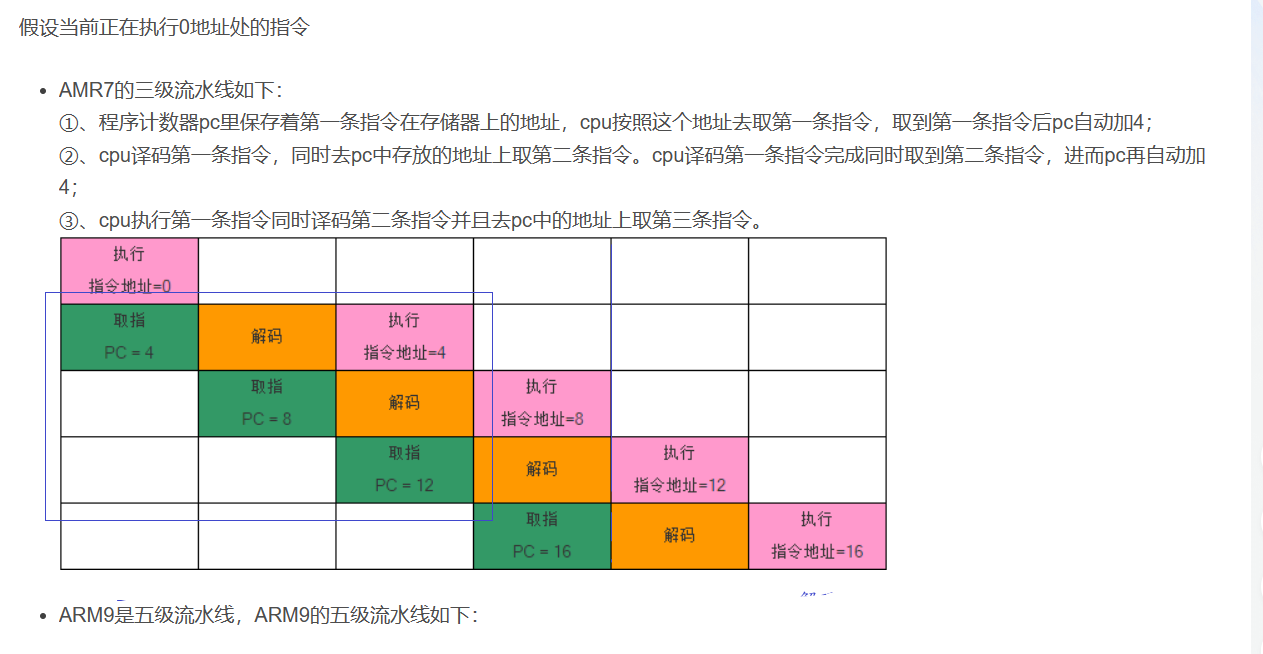
基于IMX6ULLmini的linux裸机开发系列七:中断处理流程
中断上下文 cpu通过内核寄存器来运行指令并进行数据的读写处理的,它在进入中断前一个时刻的具体值,称为中断上下文 中断上下文是指CPU在进入中断之前保存的寄存器状态和其他相关信息。当CPU接收到中断请求时,它会保存当前正在执行的指令的状…...

AbMole丨CL 316243:β3-肾上腺素受体激动剂,在代谢调控与能量消耗研究中的应用
CL 316243是一种高选择性的β3-肾上腺素受体(β3-AR)激动剂,其对β3-AR的选择性远高于β1-AR和β2-AR[1]。CL 316243(CAS No.:138908-40-4)通过激活β3-AR,刺激腺苷酸环化酶(AC&…...

3分钟从单图到3D模型:Wonder3D如何改变你的创作流程
3分钟从单图到3D模型:Wonder3D如何改变你的创作流程 【免费下载链接】Wonder3D Single Image to 3D using Cross-Domain Diffusion for 3D Generation 项目地址: https://gitcode.com/gh_mirrors/wo/Wonder3D 你是否曾为找不到合适的3D模型而烦恼?…...

HLS.js技术深度解析:解决浏览器端HLS流媒体播放的工程挑战
HLS.js技术深度解析:解决浏览器端HLS流媒体播放的工程挑战 【免费下载链接】hls.js HLS.js is a JavaScript library that plays HLS in browsers with support for MSE. 项目地址: https://gitcode.com/gh_mirrors/hl/hls.js 在现代Web视频应用中࿰…...

DeepSeek RAG pipeline重构实录,KISS检查挽救了87%的推理延迟——从2300ms到290ms的极简跃迁
更多请点击: https://intelliparadigm.com 第一章:DeepSeek RAG pipeline重构实录,KISS检查挽救了87%的推理延迟——从2300ms到290ms的极简跃迁 在一次线上 P99 延迟告警中,DeepSeek 的 RAG 服务平均响应时间飙升至 2300ms&#…...
)
别再盲目缩放PGA了!土木工程师必看的地震动调整实战指南(附Python代码)
土木工程师的地震动调整实战指南:从原理到Python实现 地震动调整是结构抗震分析中的关键环节,却常被简化为机械的PGA缩放操作。这种粗放的处理方式可能导致分析结果严重偏离实际地震响应,给工程安全埋下隐患。本文将带您深入理解地震动调整的…...
)
Win10下CUDA 11.7和PyTorch保姆级安装避坑指南(含Anaconda换源与驱动检查)
Win10深度学习环境配置全攻略:从CUDA到PyTorch的零失败实践 刚接触深度学习的新手往往在第一步——环境配置上就遭遇重重阻碍。驱动版本混乱、下载速度缓慢、环境变量缺失、版本兼容性问题……这些看似简单的步骤背后隐藏着无数可能让初学者崩溃的"坑"。本…...

092、Python在芯片验证中的应用:从脚本小子到验证架构师
092、Python在芯片验证中的应用:从脚本小子到验证架构师 一、那个凌晨三点的调试现场 上周三凌晨三点,实验室的空调嗡嗡作响。面前的屏幕上,UVM验证环境跑了八小时,终于在随机测试第237次迭代时触发了那个诡异的时序违例。日志文件12GB,波形文件更是高达80GB。手动分析?…...

从FOC电机库偷师:手把手教你用C语言写一个自己的“数学加速库”
从FOC电机库偷师:手把手教你用C语言写一个自己的"数学加速库" 在嵌入式开发领域,性能优化永远是个绕不开的话题。当你在STM32上跑电机控制算法时,突然发现三角函数计算成了瓶颈;当你处理传感器数据时,浮点运…...

远程协助软件推荐 手机怎么远程协助电脑
优质的远程协助工具能大幅提升效率、减少麻烦。日常工作中偶尔会遇到需要远程协助同事处理电脑文件的情况,很多人在寻找手机远程控制电脑的方法时,总会被功能限制、付费套路困扰,而无界趣连2.0能轻松解决这些问题,适配各类远程协助…...

CMake包签名终极指南:如何实现数字签名与完整性验证
CMake包签名终极指南:如何实现数字签名与完整性验证 【免费下载链接】cmake-examples Useful CMake Examples 项目地址: https://gitcode.com/gh_mirrors/cm/cmake-examples 在软件开发过程中,确保代码和二进制包的完整性与真实性至关重要。CMake…...