ROS与STM32通信(二)-pyserial
文章目录
- 下位机
- 上位机
- 自定义msg消息
- 发布
- 订阅
ROS与STM32通信一般分为两种,
- STM32上运行ros节点实现通信
- 使用普通的串口库进行通信,然后以话题方式发布
第一种方式具体实现过程可参考上篇文章ROS与STM32通信-rosserial,上述文章中的收发频率不一致情况,目前还没解决,所以本篇文章采用第二种方式来实现STM32与ROS通信,C++实现方式可参看这篇文章ROS与STM32通信,其利用ros serial库数据格式为C/C++共用体实现解析与发布。Python实现方式可使用pyserial库来实现通信,pyserial的用法可参考我之前写的文章python与stm32通信,数据格式我们采用Json格式来解析与发布。
以STM32读取MPU6050,然后ROS发布与订阅为例
下位机
参考之前写的文章STM32HAL库驱动MPU6050
main.c
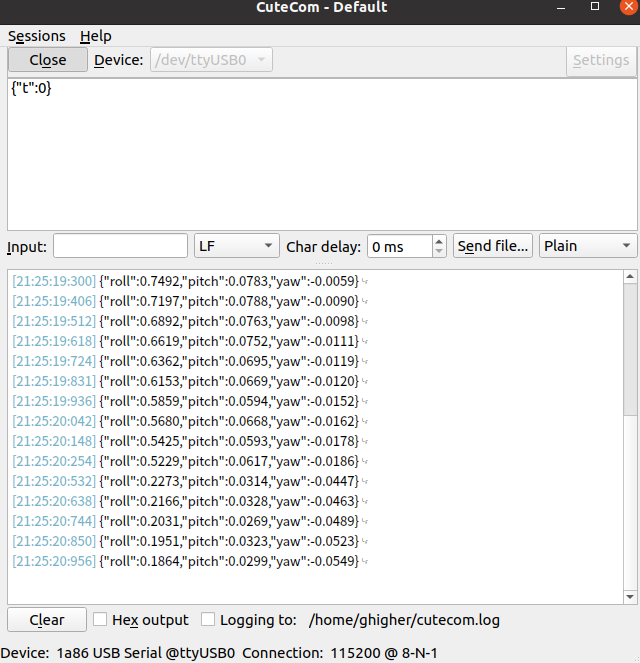
while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */while (mpu_dmp_get_data(&pitch, &roll, &yaw)); //必须要用while等待,才能读取成功printf("{\"roll\":%.4f,\"pitch\":%.4f,\"yaw\":%.4f}",roll, pitch, yaw); //Json字符串发送sprintf(oledBuf, "roll :%.2f", roll);OLED_ShowString(0, 28, (u8*)oledBuf, 12);sprintf(oledBuf, "pitch:%.2f", pitch);OLED_ShowString(0, 40, (u8*)oledBuf, 12);sprintf(oledBuf, "yaw :%.2f", yaw);OLED_ShowString(0, 52, (u8*)oledBuf, 12);OLED_Refresh();}
使用printf重定向发送json字符串,注意C语言转义字符:
printf("{\"roll\":%.4f,\"pitch\":%.4f,\"yaw\":%.4f",roll, pitch, yaw); //Json字符串发送
可使用cutecom查看发送的消息
上位机
自定义msg消息
在功能包下新建文件夹为msg
新建文件Imu.msg(首字母大写),输入以下内容
float32 pitch
float32 roll
float32 yaw
package.xml添加依赖
<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend>
CMakeList.txt编辑msg相关配置
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)## Generate messages in the 'msg' folder
add_message_files(FILESImu.msg
)## Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESstd_msgs
)catkin_package(
# INCLUDE_DIRS include
# LIBRARIES hello_vscodeCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
然后编译整个工作空间catkin_make
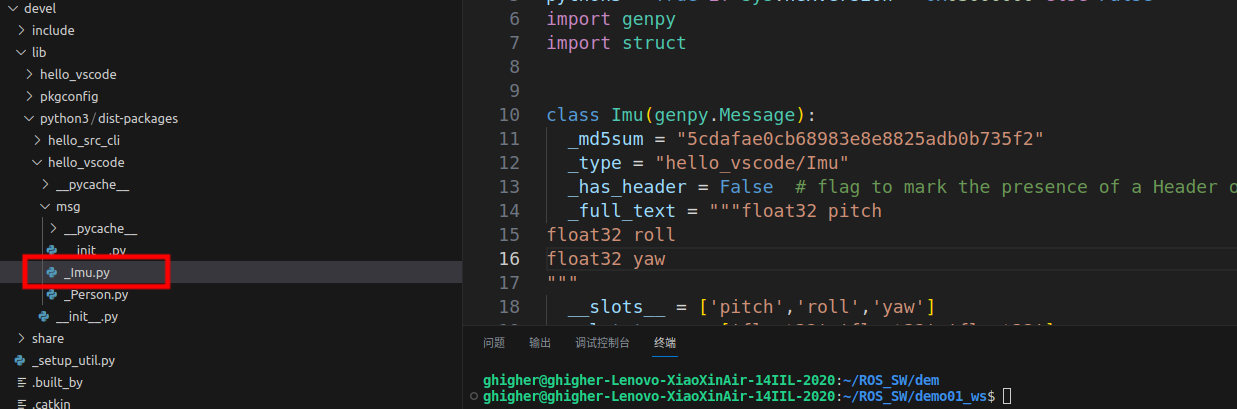
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/msg)
vscode配置
将前面生成的 python 文件路径配置进 settings.json
{"python.autoComplete.extraPaths": ["/opt/ros/noetic/lib/python2.7/dist-packages"],"python.analysis.extraPaths": ["/opt/ros/noetic/lib/python3/dist-packages","/home/ghigher/ROS_SW/demo01_ws/devel/lib/python3/dist-packages"]
}
发布
import serial
import rospy
import json
from hello_vscode.msg import Imu# 检查字符串是否为json格式
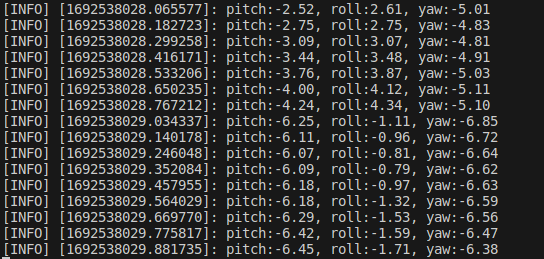
def is_json(test_str):try:json_object = json.loads(test_str) # 通过json.loads判断except Exception as e:return Falsereturn Trueif __name__ == '__main__':try:port = '/dev/ttyUSB0' # 串口号baud = 115200 # 波特率rospy.init_node("serial_node")ser = serial.Serial(port, baud, timeout=0.5)imu_pub = rospy.Publisher("imu", Imu, queue_size=10)flag = ser.isOpen()if flag:rospy.loginfo("Succeed to open port")while not rospy.is_shutdown():# data = ser.read(ser.in_waiting).decode('gbk')data = ser.readline().decode('gbk')imu_msg = Imu()if data != '' and is_json(data):# print(data)#json 解析imu_data = json.loads(data)imu_msg.pitch = imu_data["pitch"]imu_msg.roll = imu_data["roll"]imu_msg.yaw = imu_data["yaw"]imu_pub.publish(imu_msg)rospy.loginfo("pitch:%.2f, roll:%.2f, yaw:%.2f", imu_msg.pitch, imu_msg.roll, imu_msg.yaw)except Exception as exc:rospy.loginfo("Failed to open port")
python文件赋予权限并添加到CmakeList.txt
catkin_install_python(PROGRAMSscripts/ros_pyserial_pub.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
连接stm32
赋予串口权限
sudo chmod 777 /dev/ttyUSB0
运行发布文件
roscore
source ./devel/setup.bash
rosrun hello_vscode ros_pyserial_pub.py
订阅
查看话题
rostopic list
/imu
/rosout
/rosout_agg
订阅话题
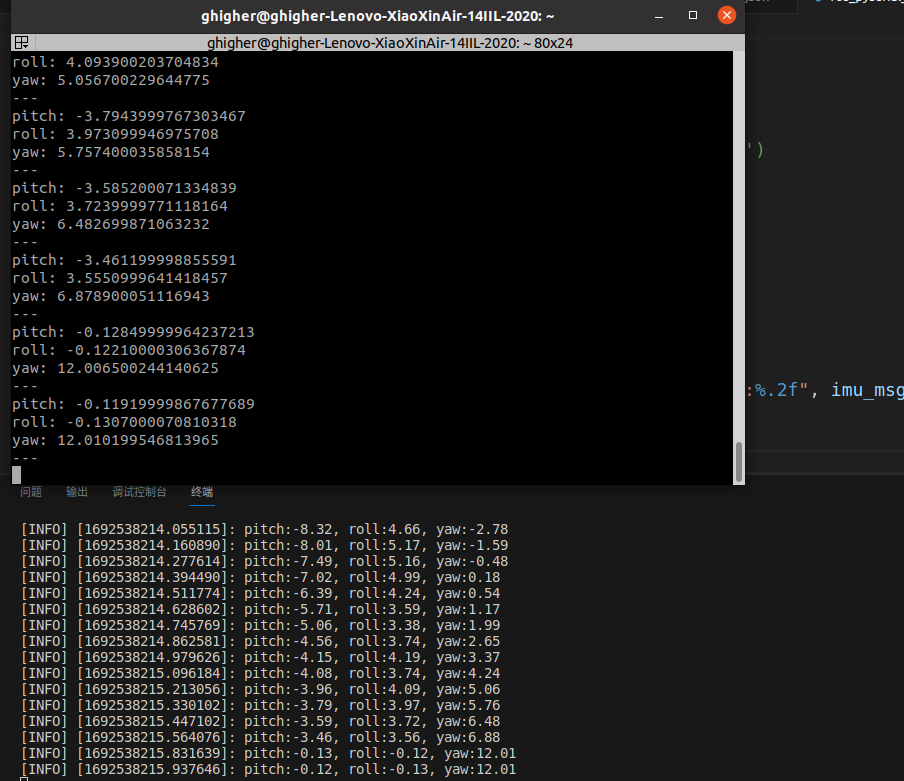
rostopic echo /imu
python实现
#! /usr/bin/env python
# -*-coding:utf8 -*-import rospy
from hello_vscode.msg import Imudef doImu(imu_msg):rospy.loginfo("--------------------------")rospy.loginfo("Pitch: %.4f", imu_msg.pitch)rospy.loginfo("Roll: %.4f", imu_msg.roll)rospy.loginfo("Yaw: %.4f", imu_msg.yaw)if __name__=="__main__":rospy.init_node("imu_sub")sub = rospy.Subscriber("imu", Imu, doImu, queue_size=10)rospy.spin()
运行
roscoresource ./devel/setup.bash rosrun hello_vscode ros_pyserial_sub.py
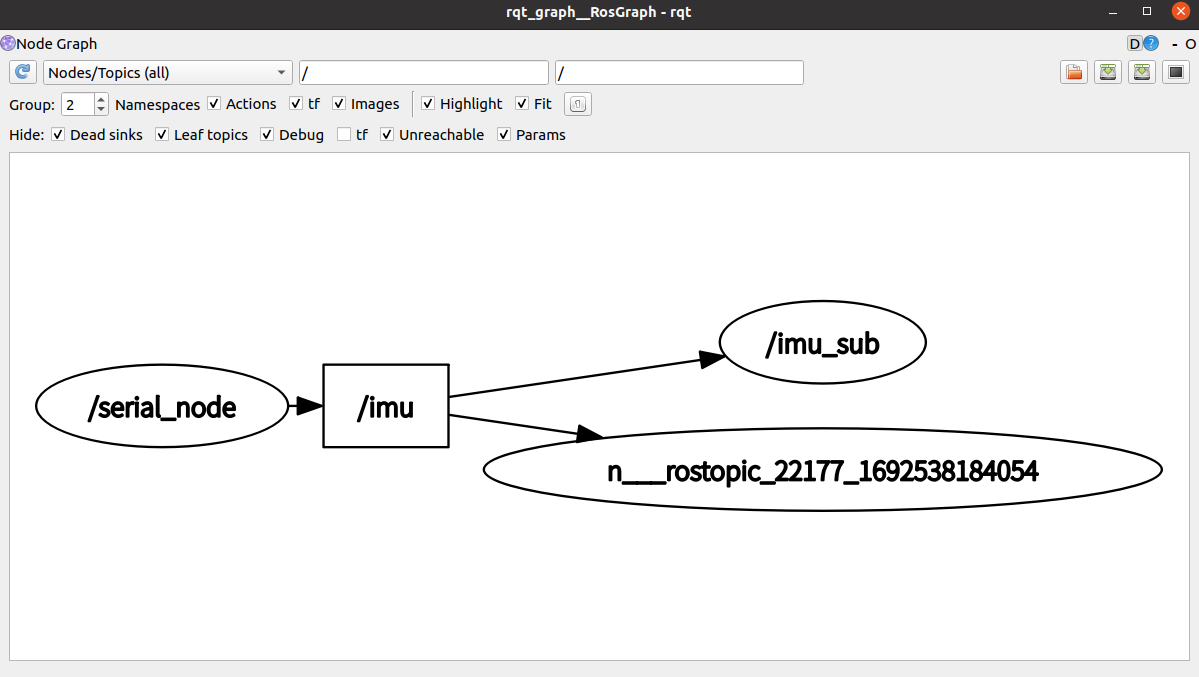
rqt_graph
相关文章:
ROS与STM32通信(二)-pyserial
文章目录 下位机上位机自定义msg消息发布订阅 ROS与STM32通信一般分为两种, STM32上运行ros节点实现通信使用普通的串口库进行通信,然后以话题方式发布 第一种方式具体实现过程可参考上篇文章ROS与STM32通信-rosserial,上述文章中的收发频率…...
[oneAPI] 使用Bert进行中文文本分类
[oneAPI] 使用Bert进行中文文本分类 Intel Optimization for PyTorch基于BERT的文本分类模型数据预处理数据集定义tokenize建立词表转换为Token序列padding处理与mask 模型 结果OneAPI参考资料 比赛:https://marketing.csdn.net/p/f3e44fbfe46c465f4d9d6c23e38e0517…...

【数据治理】什么是数据库归档
文章目录 前言什么是数据归档 前言 如果您的日常工作中需要对数据库进行管理,那您肯定已经或即将遭遇这样的困惑:随着业务的蓬勃发展,数据库文件的大小逐渐增大,您需要为在线业务提供越来越大的高性能磁盘容量,但数据…...

AI代码补全 案例 - 阿里云智能编码插件Cosy
文章目录 Cosy简介Cosy安装Marketplace安装【推荐】离线安装安装效果Cosy功能体验代码智能补全代码示例搜索API搜索自然语言搜索控制台异常搜索优质文档搜索Cosy体验有感参考Cosy简介 阿里云智能编码插件(Alibaba Cloud AI Coding Assistant)是一款AI编程助手,提供代码智能…...
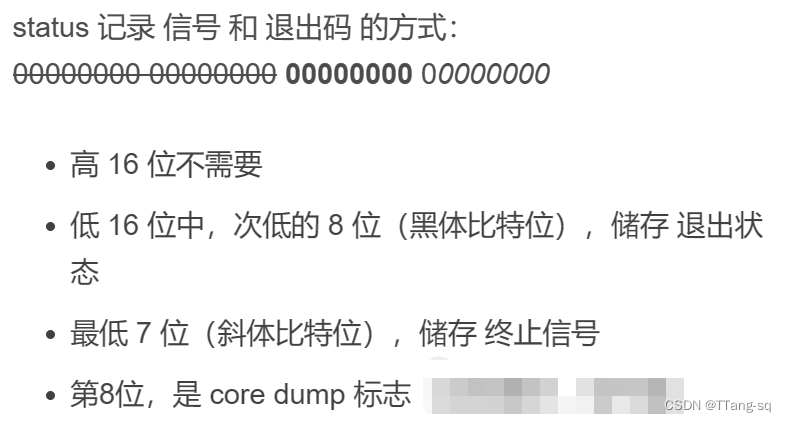
【Linux】进程信号篇Ⅰ:信号的产生(signal、kill、raise、abort、alarm)、信号的保存(core dump)
文章目录 一、 signal 函数:用户自定义捕捉信号二、信号的产生1. 通过中断按键产生信号2. 调用系统函数向进程发信号2.1 kill 函数:给任意进程发送任意信号2.2 raise 函数:给调用进程发送任意信号2.3 abort 函数:给调用进程发送 6…...
漏洞指北-VulFocus靶场专栏-中级03
漏洞指北-VulFocus靶场专栏-初级03 中级009 🌸gxlcms-cve_2018_14685🌸step1:安装系统 密码rootstep2 进入后台页面 账号密码:admin amdin888step3 查看详细 有phpinfo() 中级010 🌸dedecms-cnvd_2018_01221dz…...
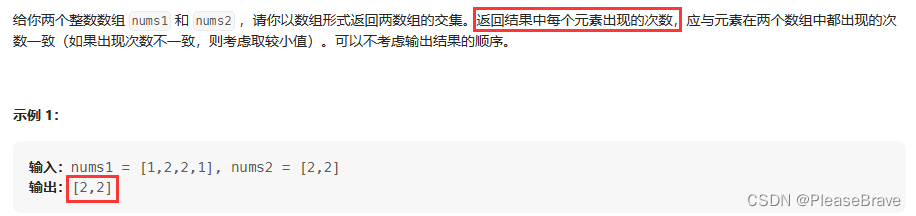
【leetcode 力扣刷题】数组交集(数组、set、map都可实现哈希表)
数组交集 349. 两个数组的交集排序+双指针数组实现哈希表unordered_setunordered_map 350. 两个数组的交集Ⅱ排序 双指针数组实现哈希表unordered_map 349. 两个数组的交集 题目链接:349. 两个数组的交集 题目内容如下,理解题意:…...

MySQL 8.0.31 登录提示caching_sha2_password问题解决方法
MySQL 8.0.31 登录提示caching_sha2_password问题解决方法 MySQL 8.0.31 使用了 caching_sha2_password 作为默认的身份验证插件,这可能导致一些旧的客户端和库无法连接到服务器。以下是一些解决此类问题的常见步骤和建议: 确保MySQL服务正在运行&#…...

[Google] DeepMind Gemini: 新一代LLM结合AlphaGo技术将力压 GPT-4|未来 AI 领域的新巨头
2016年,Google DeepMind 人工智能实验室孕育出的 AlphaGo 人工智能程序在围棋赛场上一举击败冠军选手,成为历史的见证者。如今,DeepMind 联合创始人兼首席执行官 Demis Hassabis 表示,他们的工程师正借鉴 AlphaGo 的技术研发一款名…...
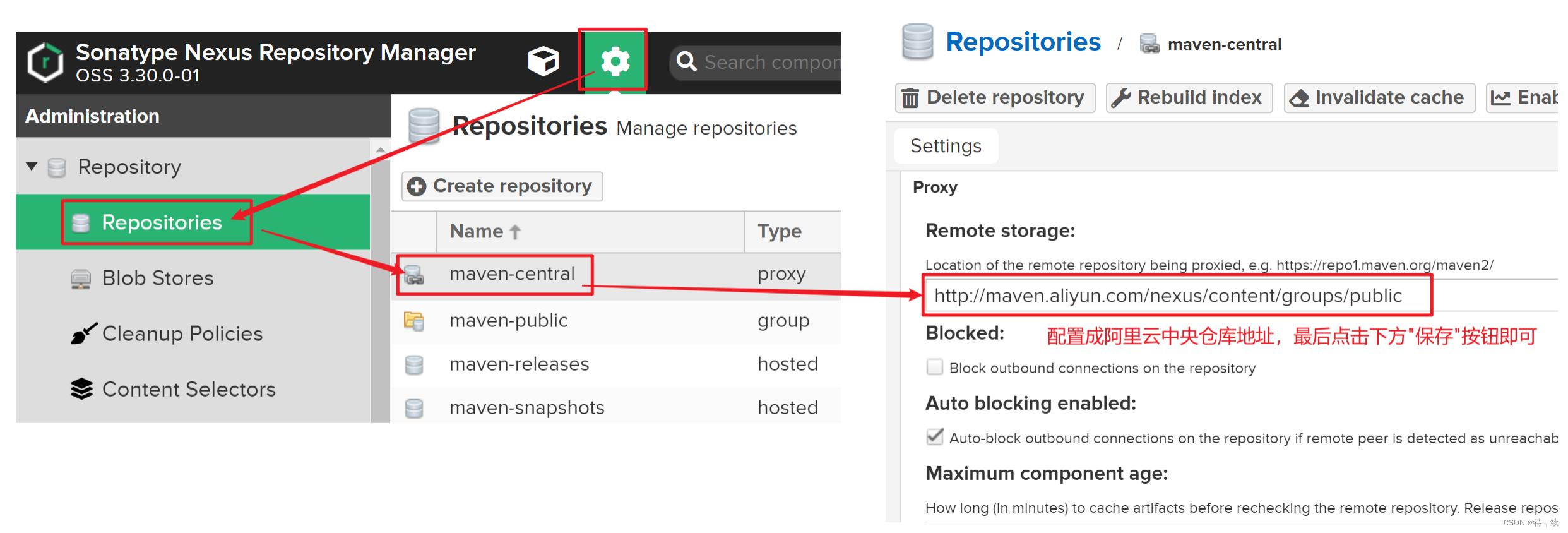
Maven高级
目录 一、分模块开发与设计 1. 分模块开发的意义 2. 分模块开发(模块拆分) (1)创建Maven模块 (2)书写模块代码 (3)通过maven指令安装模块到本地仓库(install指令&…...

【视觉SLAM入门】5.2. 2D-3D PNP 3D-3D ICP BA非线性优化方法 数学方法SVD DLT
"养气之学,戒之躁急" 1. 3D-2D PNP1.1 代数法1.1.1 DLT(直接线性变换法)1.1.2. P3P 1.2 优化法BA (Bundle Adjustment)法 2. 3D-3D ICP2.1 代数法2.1.1 SVD方法 2.2 优化(BA)法2.2.2 非线性优化方法 前置事项: 1. 3D-2D PNP 该问题描述为&am…...
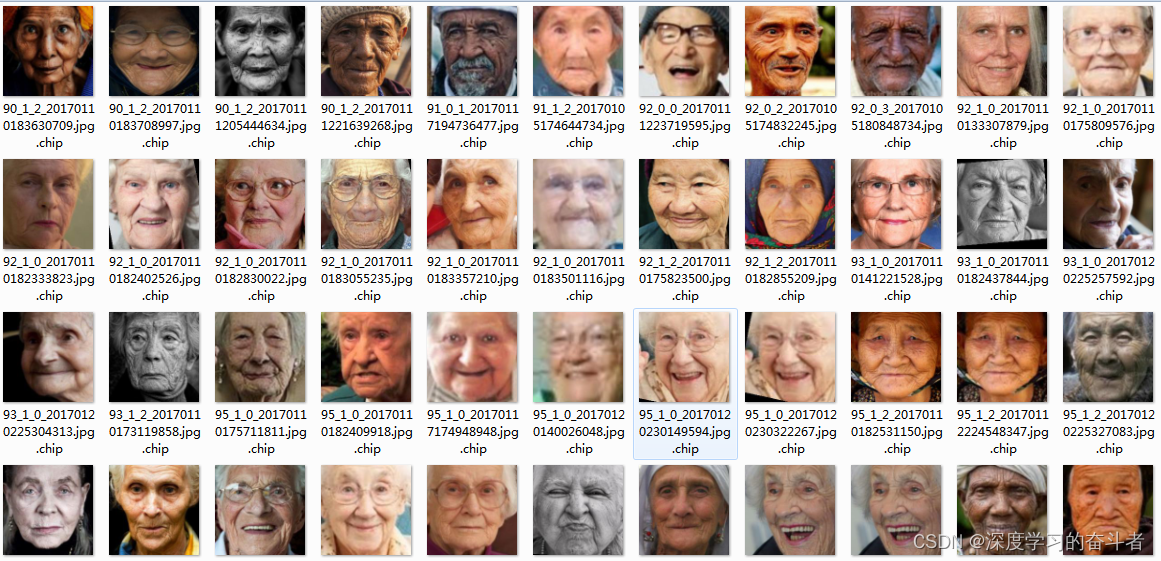
人脸老化预测(Python)
本次项目的文件 main.py主程序如下 导入必要的库和模块: 导入 TensorFlow 库以及自定义的 FaceAging 模块。导入操作系统库和参数解析库。 定义 str2bool 函数: 自定义函数用于将字符串转换为布尔值。 创建命令行参数解析器: 使用 argparse.A…...
AWS SDK 3.x for .NET Framework 4.0 可行性测试
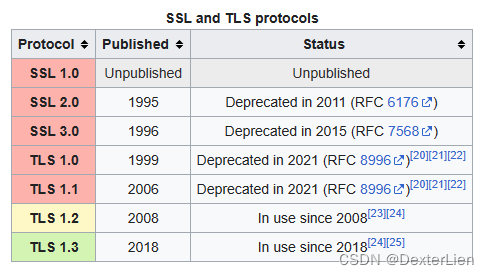
前言 为了应对日益增长的网络安全挑战, 越来越多的互联网厂商已经陆续开始或者已经彻底停止了对 SSL 3 / TLS 1.0 / TLS1.1 等上古加密算法的支持. 而对于一些同样拥有悠久历史的和 AWS 服务相关联的应用程序, 是否可以通过仅更新 SDK 版本的方式来适应新的环境. 本文将以 Win…...

两个list。如何使用流的写法将一个list中的对象中的某些属性根据另外一个list中的属性值赋值进去?
两个list。如何使用流的写法将一个list中的对象中的某些属性根据另外一个list中的属性值赋值进去? 你可以使用Java 8以上版本中的流(Stream)和Lambda表达式来实现这个需求。假设有两个List,一个是sourceList,包含要赋值属性的对象;另一个是…...

美国陆军希望大数据技术能够帮助保护其云安全
随着陆军采用更大型的云服务,一位高级官员警告说,一些在私营部门有效的快速软件开发技巧和简单解决方案(例如开放代码库)如果没有额外的安全性,将无法为军队工作。 我们知道现代软件开发确实依赖于第三方库ÿ…...

vue 文字跑马灯
<template><div class"marquee-container"><div class"marquee-content"><div>{{ marqueeText }}</div><div>{{ marqueeText }}</div> <!-- 复制一份文本,用于无缝衔接 --></div></d…...
开源ChatGPT系统源码 采用NUXT3+Laravel9后端开发 前后端分离版本
开源ChatGPT系统源码 采用NUXT3Laravel9后端开发 前后端分离版本 ChatGPT是一种基于AI的聊天机器人技术,它可以帮助用户与聊天机器人进行自然语言交流,以解决用户的问题或满足用户的需求。ChatGPT的核心技术是使用自然语言处理(NLPÿ…...

【LeetCode|数据结构】剑指 Offer 33. 二叉搜索树的后序遍历序列
题目链接 剑指 Offer 33. 二叉搜索树的后序遍历序列 标签 二叉搜索树、后序遍历 步骤 二叉搜索树的左子树的节点值 ≤ \le ≤根节点值 ≤ \le ≤右子树的节点值;对于后序遍历序列最后一个元素的值为根节点的值; 由上面的两个性质可以得出ÿ…...

自定义协程
难点 自己写了一遍协程,困难的地方在于unity中的执行顺序突然发现unity里面可以 yield return 的其实有很多 WaitForSeconds WaitForSecondsRealtime WaitForEndOfFrame WaitForFixedUpdate WaitUntil WaitWhile IEnumerator(可以用于协程嵌套…...

【Atcoder】 [ABC240Ex] Sequence of Substrings
题目链接 Atcoder方向 Luogu方向 题目解法 先考虑一个性质,选出的子串长度不会超过 2 n \sqrt {2n} 2n 考虑最劣的选法是选出长度为 1 , 2 , 3 , . . . 1,2,3,... 1,2,3,... 的子串(如果后一个选出的串比前一个子串长度大超过1,那么后…...

Python 爬虫高级实战:爬虫接口限流自适应调节
前言 网络目标站点普遍具备严格的接口访问限流、频率校验、IP 频次风控、接口令牌校验等防护机制,常规固定延时、固定并发的爬虫模式极易触发封禁、接口 429 限流、会话失效、IP 拉黑等问题。人工配置延时、手动调整并发阈值的传统方式,无法适配站点动态…...
)
告别单调仪表盘:用LVGL Gauge控件打造一个智能家居温湿度监控界面(ESP32实战)
智能家居温湿度监控实战:用LVGL打造动态仪表盘 在智能家居系统中,实时监控环境参数是基础但关键的功能。传统数字显示虽然精确,但缺乏直观性;而精心设计的仪表盘不仅能提升用户体验,还能通过视觉反馈快速传达环境状态。…...

如何解决Funannotate数据库安装失败:从403错误到完整部署的实战指南
如何解决Funannotate数据库安装失败:从403错误到完整部署的实战指南 【免费下载链接】funannotate Eukaryotic Genome Annotation Pipeline 项目地址: https://gitcode.com/gh_mirrors/fu/funannotate Funannotate是真核基因组注释的强大工具,但在…...

ICC II里做CTS,除了点‘clock_opt’,这些隐藏选项你真的都配好了吗?
ICC II时钟树综合实战:CTS隐藏选项配置全解析与QoR调优指南 在超大规模集成电路设计中,时钟树综合(CTS)的质量直接影响芯片性能、功耗和面积三大关键指标。当项目进展到后期阶段,工程师常会遇到这样的困境:…...

分布式架构实战:全平台矩阵管理系统的技术实现与性能优化
前言在数字化运营进入全域竞争的今天,多平台账号集群管理已成为企业与开发者的核心技术挑战。传统单体架构的矩阵工具普遍存在算力弹性不足、账号关联风险高、跨平台适配复杂、AI 能力割裂等问题,导致 90% 以上的自研矩阵系统最终以失败告终。本文基于生…...

形转化理论:基本概念、深刻机制与研究框架的系统性阐述
摘要形转化理论(Form-Transformation Theory, FTT)是一种基于信息本体论的全新物理范式,旨在将宇宙的基本实在重新界定为永恒、离散的信息处理网络动力学。本文系统阐述该理论的核心概念体系、两大支柱性数学框架及从微观网络到宏观物理的涌现…...

通过curl命令快速测试Taotoken提供的各类大模型API响应效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令快速测试Taotoken提供的各类大模型API响应效果 对于习惯命令行操作或需要在无SDK环境中验证集成的开发者而言…...
)
【独家首发】Sora 2正式版未公开能力清单:原生支持3D空间锚点+时间轴语义编辑+版权水印嵌入(附OpenAI内部文档节选)
更多请点击: https://intelliparadigm.com 第一章:Sora 2正式版核心能力全景概览 多模态时序理解与生成一体化 Sora 2正式版突破性地将文本、图像、音频及物理运动参数统一编码至共享时空潜空间,支持长达120秒、1080p分辨率的连贯视频生成。…...

别再复制粘贴了!手把手教你封装一个可复用的Qt文本编辑器核心组件类
从零封装高复用Qt文本编辑器核心类:工程化实践指南 在Qt开发中,文本编辑器是最常见的功能需求之一。许多开发者习惯将所有逻辑堆砌在MainWindow类中,导致代码臃肿、难以维护和复用。本文将带你从工程化角度重构文本编辑器,将其核心…...

实战指南:如何通过Vosk API实现95%+准确率的离线语音识别系统
实战指南:如何通过Vosk API实现95%准确率的离线语音识别系统 【免费下载链接】vosk-api Offline speech recognition API for Android, iOS, Raspberry Pi and servers with Python, Java, C# and Node 项目地址: https://gitcode.com/GitHub_Trending/vo/vosk-ap…...