嵌入式:ARM Day6
作业:完成cortex-A7核UART总线实验
目的:1.输入'a',显示'b',将输入的字符的ASCII码下一位字符输出
2.原样输出输入的字符串
源码:
uart4.h
#ifndef __UART4_H__
#define __UART4_H__#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_uart.h"//RCC/GPIO/UART4章节初始化
void hal_uart4_init();//发送一个字符函数
void hal_put_char(const char str);//发送一个字符串函数
void hal_put_string(const char* string);//接收一个字符函数
char hal_get_char();//接收一个字符串函数
char *hal_get_string();#endif
uart4.c
#include "uart4.h"//RCC/GPIO/UART4章节初始化
void hal_uart4_init(){//RCC章节初始化//1.使能GPIOB组控制器RCC->MP_AHB4ENSETR |= (0X1 << 1);//2.使能GPIOG组控制器RCC->MP_AHB4ENSETR |= (0x1 << 6);//3.使能UART4组控制器RCC->MP_APB1ENSETR |= (0x1 << 16);//GPIO章节初始化//1.设置PB2引脚为复用功能GPIOB->MODER &= (~(0X3 << 4));GPIOB->MODER |= (0x1 << 5);//2.设置PB2引脚复用功能为UART4_RX AFRL[11:8] = 1000GPIOB->AFRL &= (~(0xf << 8));GPIOB->AFRL |= (0x1 << 11);//1.设置PG11引脚为复用功能 MODER[23:22] = 10GPIOG->MODER &= (~(0X3 << 22));GPIOG->MODER |= (0x1 << 23);//2.设置PG11引脚复用功能为UART4_TX AFRH[15:12] = 0110GPIOG->AFRH &= (~(0xf <<12));GPIOG->AFRH |= (0X3 << 13);//UART4章节初始化//8N1 115200 使能//0.设置UE=0USART4->CR1 &= (~0X1);//1.设置UART4串口1位起始位,8位数据位 CR1[28][12] = 00USART4->CR1 &= (~(0X1 << 12));USART4->CR1 &= (~(0X1 << 28));//2.设置UART4串口没有校验位 CR1[10] = 0USART4->CR1 &= (~(0X1 << 10));//3.设置UART4串口1位停止位 CR2[13:12] = 00USART4->CR2 &= (~(0X3 << 12));//4.设置UART4串口16倍采样率 CR1[15] = 0USART4->CR1 &= (~(0x1 << 15));//5.设置UART4串口不分频 PRESC[3:0] = 0000USART4->PRESC &= (~0xf);//6.设置UART4串口波特率为 115200 BRR = 0x22B//BRR = 64000000 / 115200USART4->BRR = 0x22B;//7.设置UART4串口发送器使能 CR1[3] = 1USART4->CR1 |= (0x1 << 3);//8.设置UART4串口接收器使能 CR1[2] = 1USART4->CR1 |= (0X1 << 2);//9.设置UART4串口使能 CR1[0] = 1 UE=1USART4->CR1 |= 0X1;
}//接收一个字符函数
char hal_get_char(){//判断接收数据寄存器中,是否接收到数据while(!(USART4->ISR & (0X1 << 5)));//将接收数据寄存器中的内容读出来char ch = USART4->RDR;return ch;
}char buf[128] = "";
//接收一个字符串函数
char *hal_get_string(){//循环//enter = 'r'int i = 0;for(i = 0; i < 128; i++){buf[i] = hal_get_char();hal_put_char(buf[i]);if(buf[i] == '\r'){break;}}buf[i] = '\0';hal_put_char('\n');return buf;
}//发送一个字符函数
void hal_put_char(const char str){//1.判断发送数据寄存器是否为空 ISR[7]//读0:发送数据寄存器满,需要等待//读1:发送数据寄存器为空,可以发送数据while(!(USART4->ISR & (0x1 << 7)));//2.将要发送的数据,赋值给发送数据寄存器中USART4->TDR = str;//判断一帧数据是否发送完成while(!(USART4->ISR & (0x1 << 6)));
}//发送一个字符串函数
void hal_put_string(const char *string){//判断是否为'\0'//一个一个字符进行发送就可以while(*string){hal_put_char(*string++);}
}
main.c
#include "uart4.h"extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{int i,j;for(i = 0; i < ms;i++)for (j = 0; j < 1800; j++);
}int main()
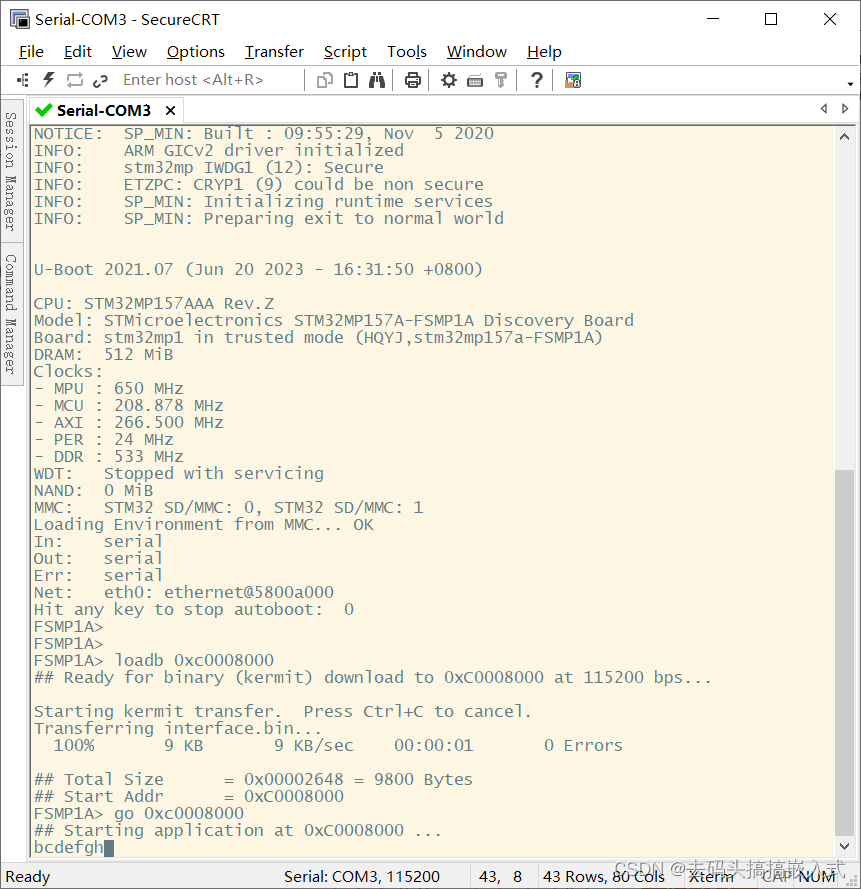
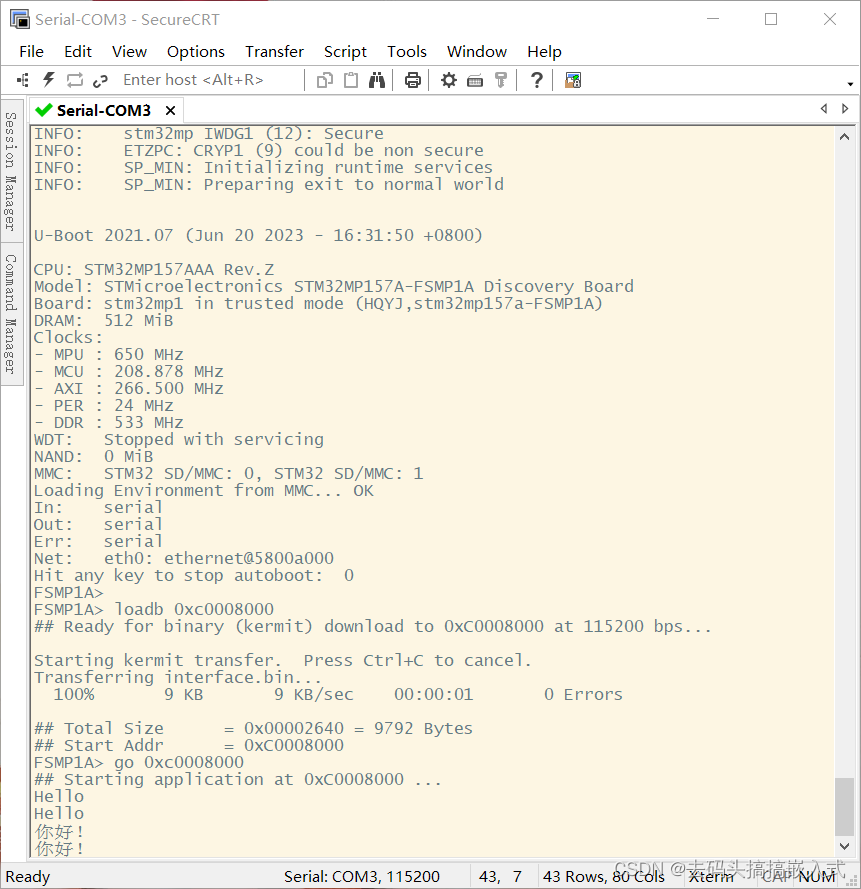
{while(1){//hal_put_char(hal_get_char() + 1); //输出字符的ASCII码后一个字符hal_put_string(hal_get_string()); //输出原样字符串}return 0;
}
结果1:
结果2:
相关文章:
嵌入式:ARM Day6
作业:完成cortex-A7核UART总线实验 目的:1.输入a,显示b,将输入的字符的ASCII码下一位字符输出 2.原样输出输入的字符串 源码: uart4.h #ifndef __UART4_H__ #define __UART4_H__#include "stm32mp1xx_rcc.h" #incl…...

ClickHouse安装步骤
文章目录 ClickHouse安装步骤背景安装启动用户相关修改密码登录验证新增用户config配置文件 基本操作服务管理 ClickHouse安装步骤 背景 经过研究ClickHouse是列式数据库,下面是在Centos7.9版本单机版的安装的演示 安装 首先安装yum-utils工具包 sudo yum inst…...
 CCodec Native服务实现分析)
Android CCodec (二十) CCodec Native服务实现分析
1、C2解码服务registerAsService注册流程 google实现CCodec的vendor默认解码服务代码路径是在frameworks/av/media/codec2/hidl/services/vendor.cpp中,而其注册的是HIDL服务,本文就对HIDL服务注册做简要分析。首先看下vendor.cpp中的代码注册流程。 int main(int /* argc *…...

Shell编程学习之while循环语句和for循环语句的应用
Shell编程中的while循环:可以类比C语言中的while循环进行学习,详见本人原创博客链接: https://blog.csdn.net/qq_41878292/article/details/132081302?spm1001.2014.3001.5502伪代码表示: while 表达式 do循环体 done用法类比S…...
【校招VIP】CSS校招考点之选择器优先级
考点介绍: 选择器是CSS的基础,也是校招中的高频考点,特别是复合选择器的执行优先级,同时也是实战中样式不生效的跟踪依据。 因为选择器的种类较多,很难直接记忆,可以考虑选择一个相对值,比如id类…...
Netty+springboot开发即时通讯系统笔记(四)终
实时性 1.线程池多线程,把消息同步给其他端和对方用户,其中数据持久化往往是最浪费时间的操作,可以使用mq异步存储,因为其他业务不需要拿着整条数据,只需要这条数据的id进行操作。 2。消息校验前置,放在t…...

java -jar 启动服务后,关闭命令窗口后服务停止
java -jar 启动服务后,关闭命令窗口后服务停止 问题:当我们用java -jar命令启动服务后,只有一直保持Xshell的窗口开启且正常连接服务器时才能访问服务,当关闭命令窗口时,服务会停止运行 解决:使用nohup命…...

Android PowerManager的使用
唤醒锁定 如果需要使 CPU 保持运行状态,以便在设备进入休眠模式之前完成某项工作,可以使用“唤醒锁定” 。 添加权限 <uses-permission android:name"android.permission.WAKE_LOCK" />设置唤醒锁定 PowerManager powerManager (Po…...
安防监控/视频集中存储/云存储平台EasyCVR v3.3增加首页告警类型
安防监控/视频集中存储/云存储EasyCVR视频汇聚平台,可支持海量视频的轻量化接入与汇聚管理。平台能提供视频存储磁盘阵列、视频监控直播、视频轮播、视频录像、云存储、回放与检索、智能告警、服务器集群、语音对讲、云台控制、电子地图、平台级联、H.265自动转码等…...
7-6 统计字符出现次数
分数 20 全屏浏览题目 切换布局 作者 C课程组 单位 浙江大学 本题要求编写程序,统计并输出某给定字符在给定字符串中出现的次数。 输入格式: 输入第一行给出一个以回车结束的字符串(少于80个字符);第二行输入一个…...

美国大模型风向速报(一)为何重视提示工程?LangChain+向量数据库+开源大模型真香...
多家,且独家来自美国的信源同时向“亲爱的数据”表示, 提示工程(Prompt Engineering)在美国大模型领域备受重视。 读者都要聊, 那就干活。 (一)开源真香 现阶段,AI开源极客大展身手&…...
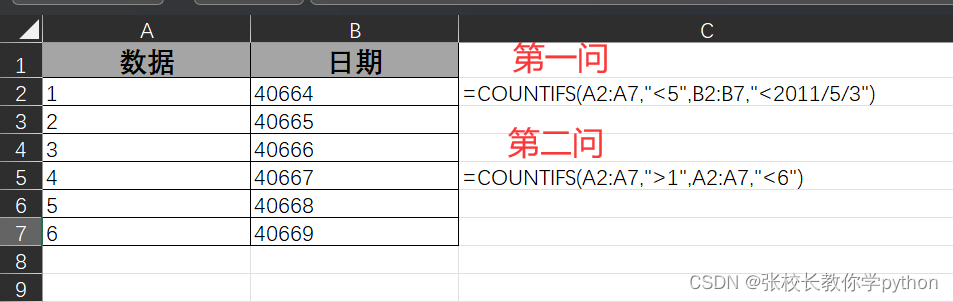
excel统计函数篇2之count系列
1、COUNT(value1,[value2],…):计算参数列表中数字的个数 2、COUNTA(value1,[value2],…):计算参数列表中值的个数 联想在excel之数学函数、excel中的通配符一文中提到求和函数: SUMIF(range,ceriteria,[sum_range]):对范围内符合指定条件的…...
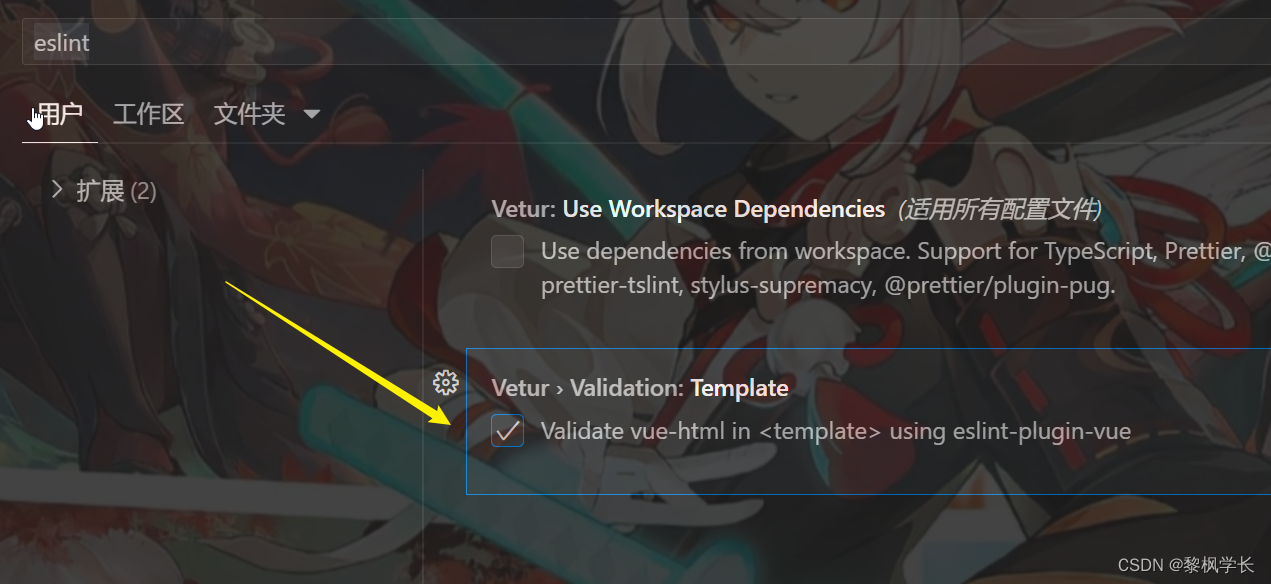
vue3组件多个根节点报错
打开扩展商店搜索下载 vetur 打开设置命令面板 搜索eslint 将下面的勾选取消...

基于Rust的QuickLZ压缩算法的详细实现与分析
1. 引言 QuickLZ是一种被广泛应用的高效压缩算法。在许多应用中,快速的数据压缩和解压缩是非常关键的,特别是在网络传输和存储空间有限的场景中。为了满足现代软件开发的需求,我们将使用Rust语言来实现这一算法。Rust是一种专为系统级编程而…...
next.js 创建 react ant design ts 项目
环境说明:next.js 官方文档要求node版本在16.8以上。笔者使用的 node版本是16.20.1,不要使用16.13.0,笔者在使用 node16.13.0环境时创建的 react 项目点击事件无效 next.js官网截图 next.js 官网:https://nextjs.org/ react 官网…...

无涯教程-Perl - use函数
描述 此函数将MODULE导出的所有功能(或仅LIST引用的功能)导入当前包的名称空间。有效等效于- BEGIN { require "Module.pm"; Module->import(); }也用于在当前脚本上强加编译器指令(编译指示),尽管从本质上讲它们只是模块。 请注意,use语句在编译时进行判断。在…...
(7)(7.6) 恢复任务回放
文章目录 前言 7.6.1 配置 7.6.2 工作原理 7.6.3 局限性 前言 本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。 !Note 从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突&…...

spark yarn 开启动态资源分配
概念 不需要指定并发,只需要指定内存, 程序在运行后会动态调节并发数量,我们只需要设置一个上线即可 在spark 配置文件设置: spark.dynamicAllocation.enabled true spark.shuffle.service.enabled true 准备shuffer jar 将spar…...
Android学习之路(8) Activity
本节引言: 本节开始讲解Android的四大组件之一的Activity(活动),先来看下官方对于Activity的介绍: 移动应用体验与桌面体验的不同之处在于,用户与应用的互动并不总是在同一位置开始,而是经常以不确定的方式开始。例如&…...
Linux的热拔插UDEV机制
文章目录 UDEV简介守护进程基本特点 守护进程和后台进程的区别开发守护进程结束 UDEV简介 udev是一个设备管理工具,udev以守护进程的形式运行,通过侦听内核发出来的uevent来管理/dev目录下的设备文件。 udev在用户空间运行,而不在内核空间 …...

AI 写论文哪个软件最好?2026 毕业论文实测:真文献 + 真图表 + 全流程,虎贲等考 AI 稳占首选
📌 配图 1:首图海报 ——AI 写论文哪个最好|虎贲等考 AI|毕业论文神器|真实文献 实证图表 每年毕业季,所有人都在问:AI 写论文哪个软件最好?市面上工具看似很多,可一用…...

GroundTruth-MCP:为AI生成代码构建实时事实核查防火墙
1. 项目概述:当AI助手自信地写出过时代码时你的AI助手刚刚又“自信满满”地给你生成了一堆过时的代码。它告诉你React 19里forwardRef用得没问题,Next.js 15的cookies()还是同步函数,或者用字符串模板拼接SQL查询“既简洁又高效”。更糟的是&…...

加州DMV十年自动驾驶报告深度解析:从测试数据看行业格局与技术演进
1. 项目概述:一份数据,十年自动驾驶风云如果你关注自动驾驶,那你一定听说过加州车管局(DMV)的年度测试报告。这玩意儿,可以说是全球自动驾驶行业的“晴雨表”和“成绩单”。从2015年开始,加州就…...

第六篇:《JMeter逻辑控制器:循环、条件和交替执行》
在实际业务测试中,并非只是简单的顺序执行。有时需要重复执行某些操作(循环),有时需要根据条件决定执行哪个分支(条件),有时需要模拟多个用户的交替行为(交替)。JMeter 提…...

PyInstaller打包的EXE程序修改与反编译
PyInstaller打包的EXE程序修改与反编译完全指南 前言 在实际工作中,我们经常会遇到需要修改已打包的Python EXE程序的情况——可能是界面文字需要调整,也可能是功能需要微调。本文将系统介绍如何对PyInstaller打包的EXE程序进行反编译、修改和重新打包&a…...

NVIDIA aicr:AI容器运行时核心原理与生产部署指南
1. 项目概述:当AI遇见容器运行时如果你在AI开发或者高性能计算领域摸爬滚打过一段时间,大概率会遇到一个让人头疼的问题:如何高效、稳定地管理那些“胃口”巨大、依赖复杂的AI工作负载?从训练一个大型语言模型到运行一个实时的计算…...

ai圈重大新闻xAI 被解散、并入 SpaceX 并改为 SpaceXAI 深度解读
xAI 被解散、并入 SpaceX 并改为 SpaceXAI,本质是:技术路线失败+团队彻底崩塌+巨额亏损难持续+商业变现无力+资本与IPO压力+马斯克战略转向,六重因素叠加下的“止损式重组”…...

怪物猎人世界终极叠加层工具:HunterPie 5分钟快速上手指南
怪物猎人世界终极叠加层工具:HunterPie 5分钟快速上手指南 【免费下载链接】HunterPie-legacy A complete, modern and clean overlay with Discord Rich Presence integration for Monster Hunter: World. 项目地址: https://gitcode.com/gh_mirrors/hu/HunterPi…...

告别理论!在Spartan-6上玩转DDR3:从MIG IP核配置到UCF约束文件修改的完整避坑指南
Spartan-6 FPGA DDR3实战:从MIG配置到硬件调试的全链路解析 当你在ISE中点击"Generate"按钮完成MIG IP核配置时,真正的挑战才刚刚开始。这份指南将带你穿越从IP核生成到稳定运行的完整链路,特别聚焦那些官方文档语焉不详、网络教程…...

量子计算误差缓解技术解析与应用实践
1. 量子计算误差缓解技术概述 量子计算中的误差主要来源于量子比特与环境相互作用导致的退相干、量子门操作的不完美性以及测量误差。这些误差会随着量子电路深度的增加而累积,严重影响计算结果的可靠性。误差缓解技术旨在通过硬件和软件层面的方法,在不…...