机器人制作开源方案 | 滑板助力器
我们可以用一块废滑板做些什么呢?
如今,越来越多的人选择电动滑板作为代步工具或娱乐方式,市场上也涌现出越来越多的电动滑板产品。


(图片来源:Backfire Zealot X Belt Drive Electric Skateboard– Backfire Boards)

(图片来源:Electric Skateboards - Boosted USA)
那么,这是不是就意味着传统的"原始"滑板会被冷落呢?

我们团队里有几个滑板爱好者,他们认为可以发明一种滑板助力器,让原始滑板焕发新生命,摆脱对人体能量的依赖。安装滑板助力器之后,我们的原始滑板就可以得到电动助力,延长滑行距离,提高速度,并且不再依赖个人体力续航。同时也要保留传统滑板的操作方式,尽量不改变滑板玩家的操作习惯(比如上下板的动作),这样既能享受电动滑板的便利和效率,又能保留一些“原始情结”。
既然要做电动的助力器,那么选择一个合适的电机是少不了的。经过对比,我们选择了robodyno一体化可编程电机Pro-P12型。该电机采用驱控一体设计,全钢齿轮组1:12.45行星减速器,14位绝对位置磁编码器,IIC总线接口,额定功率35W,最高转速310rpm,堵转扭矩2.79N·m。借助一块小小的通信模块与电脑连接后,即可使用python语言直接编程,非常适合开发。
曾经用于开发机械臂、机器狗、智能车等开发项目。

电机选定后,接下来的关键就是轮子,我们从网上挑选了一款搅拌机用的摩擦轮,改造后便可作为助力器的轮子。

接下来准备好全套零部件及装配工具。

去掉摩擦轮原先的轮毂并安装上Robodyno Pro-P12电机配套的轮毂零件,以及3D打印的轮毂外圈,轮子部分就完成了。

然后给电机装上轮架侧板,再和轮子装配在一起。


将轴承、轮架顶板、轮架外板装上(在上图中,轮架顶板和轮架外板已经装成了L型,即图中右侧第一个零件),助力轮便装配完成了。

最后,在滑板板尾和合适位置上打孔,并将助力轮安装在滑板上面。

装配完成。

下面是我们选择的控制器,采用ESP32-Pico-D4芯片,安装了一块OLED屏幕(用于显示操作界面)以及一个旋钮按键(用于操作)。这个控制器里已经集成一个电机通信模块,因此不需要额外安装电机通信模块了。

我们编写了一套固件,让它可以用于控制滑板。
通过拨动旋钮,可以控制助力轮的输出力矩,数字越大,力矩越大,旋转速度也就越快,使用者可以根据自身体重和期望的起步速度来选择合适的数值。

点击下方的正方形按钮,就可以控制助力轮启停。
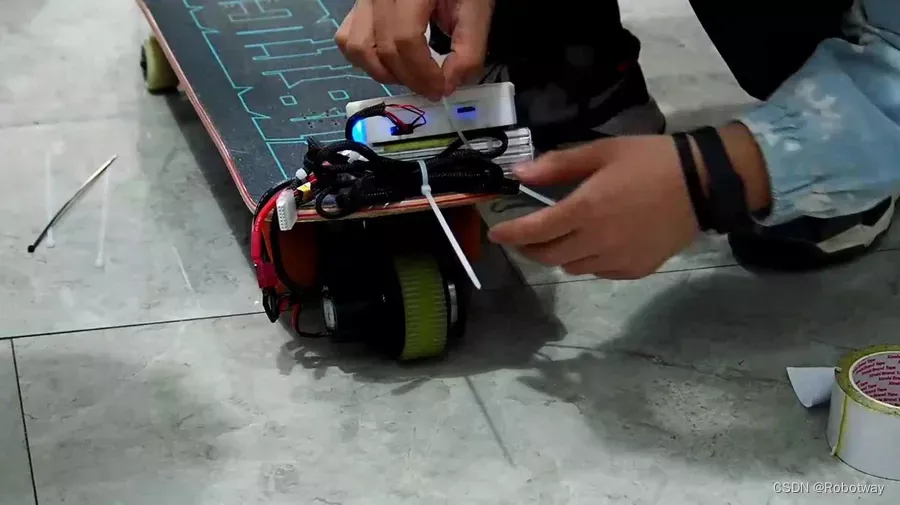
然后接上11.1V动力电池,并将电池和控制器用轧带固定在滑板上。
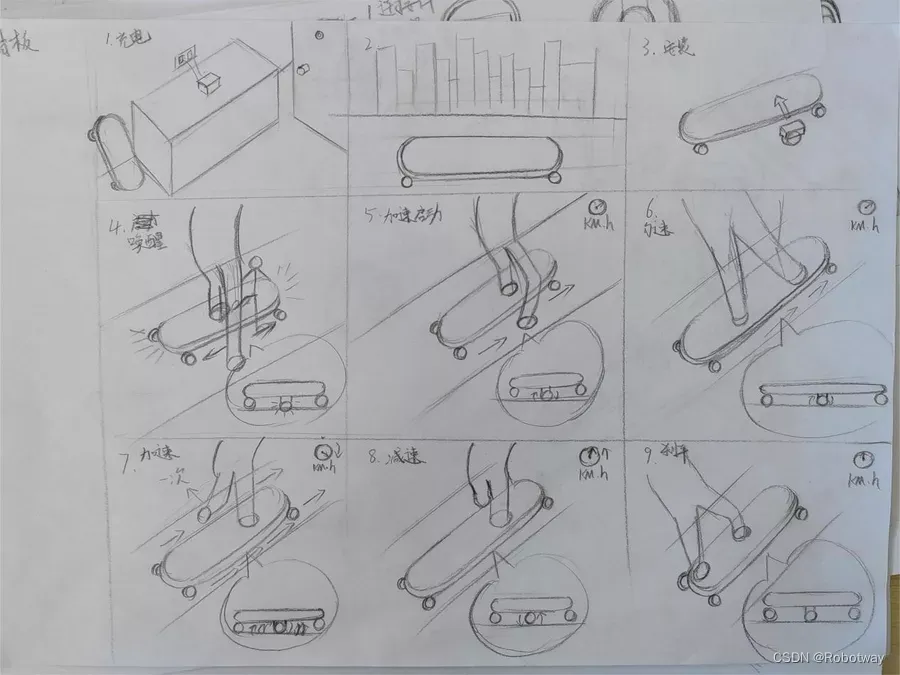
我们最期待的功能是要让滑板像普通滑板一样,蹬一脚就能走,用脚摩擦地面就能停。换句话说,就是开机后,电机在未受力的情况下静止,受到一定的推力后开始转动,受到一定的阻力后停止转动。Robodyno Pro电机使用python即可编程,非常方便。

程序源代码如下:
main.py
Python
import lvgl as lv
from ili9XXX import ili9488, LANDSCAPE
SCR_WIDTH = 480
SCR_HEIGHT = 320
disp = ili9488(mosi=4, miso=18, clk=5, cs=14, dc=13, rst=12, \power=-1, backlight=15, backlight_on=1, factor=32, \width=SCR_WIDTH, height=SCR_HEIGHT, rot=LANDSCAPE)
from ft6x36 import ft6x36
touch_rst = Pin(2, Pin.OUT)
touch_rst.on()
touch = ft6x36(sda=27, scl=26, width=SCR_HEIGHT, height=SCR_WIDTH, inv_x=True, swap_xy=True)style = lv.style_t()
style.init()
style.set_radius(0)
style.set_bg_color(lv.color_hex(0x2E3234))
style.set_text_color(lv.color_hex(0xC2C1C1))
style.set_border_width(0)screen = lv.scr_act()
screen.add_style(style, 0)from motor_controller import MotorControllercontroller = MotorController(screen)import time
while True:controller.update()time.sleep(0.01)boot.py
Python
# This file is executed on every boot (including wake-boot from deepsleep)
#import esp
#esp.osdebug(None)
#import webrepl
#webrepl.start()
from machine import Pin
import time
power = Pin(32, Pin.OUT)
_roller_btn = Pin(36, Pin.IN)
_enc_a = Pin(37, Pin.IN)
_enc_b = Pin(38, Pin.IN)
_a0 = 1
_b0 = 1
_ab0 = 1
enc_pos = 0
def on_enc_change(pin):global _a0, _b0, _ab0, enc_posa = _enc_a.value()b = _enc_b.value()if not a == _a0:_a0 = aif not b == _b0:_b0 = benc_pos += 1 if a == b else -1if not (a == b) == _ab0:enc_pos += 1 if a == b else -1_ab0 = (a == b)_enc_a.irq(handler = on_enc_change)
time.sleep(2)
power.on()encoder.py
Python
from machine import Pin
class Encoder:def __init__(self):self.btn_pin = Pin(36, Pin.IN)self.enc_a = Pin(37, Pin.IN)self.enc_b = Pin(38, Pin.IN)self.a0 = 1self.b0 = 1self.ab0 = 1self.pos = 0self.enc_a.irq(handler = self.on_change)def on_change(self, pin):a = self.enc_a.value()b = self.enc_b.value()if not a == self.a0:self.a0 = aif not b == self.b0:self.b0 = bself.pos += 1 if a == b else -1if not (a == b) == self.ab0:self.pos += 1 if a == b else -1self.ab0 = (a == b)motor_controller.py
Python
from encoder import Encoder
import lvgl as lv
from machine import Pin
import time
from robodyno import *class MotorController:def __init__(self, container):self.running_flag = Falseself.encoder = Encoder()self.container = containerself.power = Pin(32, Pin.OUT)self.can = CanBus()self.motor = Motor(self.can, 0x10, ROBODYNO_PRO_12)self.motor.torque_mode()self.max_torque = 3self.draw_power_btn()self.draw_bar()self.draw_btn()def draw_bar(self):self.label = lv.label(self.container)self.label.set_text(str(self.encoder.pos))self.label.set_style_text_font(lv.font_montserrat_24, 0)self.label.align(lv.ALIGN.TOP_MID, 0, 50)self.bar = lv.bar(self.container)self.bar.set_size(200, 20)self.bar.align(lv.ALIGN.TOP_MID, 0, 90)self.bar.set_value(self.encoder.pos, lv.ANIM.OFF)def draw_btn(self):self.btn = lv.btn(self.container)self.btn.align(lv.ALIGN.TOP_MID, 0, 150)self.btn.set_size(100,100)self.btn.set_style_bg_color(lv.color_hex(0x4EB181), 0)self.btn_label = lv.label(self.btn)self.btn_label.set_style_text_font(lv.font_montserrat_24, 0)self.btn_label.set_text(lv.SYMBOL.PLAY)self.btn_label.center()self.btn.add_event_cb(self.on_btn_click, lv.EVENT.CLICKED, None)def on_btn_click(self, e):btn = e.get_target()label = btn.get_child(0)if self.running_flag:self.motor.set_torque(0)self.motor.disable()self.running_flag = Falsebtn.set_style_bg_color(lv.color_hex(0x4EB181), 0)label.set_text(lv.SYMBOL.PLAY)else:self.motor.set_torque(0)self.motor.enable()self.running_flag = Truebtn.set_style_bg_color(lv.color_hex(0xF44336), 0)label.set_text(lv.SYMBOL.STOP)def draw_power_btn(self):self.power_btn = lv.btn(self.container)self.power_btn.align(lv.ALIGN.TOP_RIGHT, -40, 40)self.power_btn.set_size(40,40)self.power_btn.set_style_bg_color(lv.color_hex(0xF44336), 0)self.power_btn_label = lv.label(self.power_btn)self.power_btn_label.set_style_text_font(lv.font_montserrat_24, 0)self.power_btn_label.set_text(lv.SYMBOL.POWER)self.power_btn_label.center()self.power_btn.add_event_cb(self.on_power_off, lv.EVENT.CLICKED, None)def on_power_off(self, e):self.power.off()def update(self):if self.encoder.pos > 100:self.encoder.pos = 100if self.encoder.pos < 0:self.encoder.pos = 0self.bar.set_value(self.encoder.pos, lv.ANIM.OFF)self.label.set_text(str(self.encoder.pos))if self.running_flag:b = 0.002 + self.encoder.pos / 100 * 0.3vel = self.motor.get_vel()if vel is not None:vel = -veltorque = 0if vel > 3:torque = max(-0.107 - b * vel, -self.max_torque)elif vel < -3:torque = min(0.1 - b * vel, self.max_torque)self.motor.set_torque(torque)将以上4个程序文件拷贝到控制器的内存中,即可被固件调用。
接下来测试一下起步。

然后再试一下转弯,表现效果还不错。

最后试一下刹车。

这些稳如狗的表现自然是通过一次又一次的调试和数不清的翻车换来的。




现在,我们的报废滑板又获得赛博新生啦~(可以踩着它出去浪了)

本项目已经开源,资料可在下方链接处下载。如果您对本项目有任何建议,欢迎留言。
附:Robodyno Pro一体化可编程电机技术文档
附:Robodyno Pro一体化可编程电机购买链接
附:主要零件清单
| 序号 | 零件名称 | 数量 | 备注 |
| 1 | 普通滑板 | 1 | |
| 2 | Robodyno Pro-P12一体化可编程电机 | 1 | |
| 3 | 搅拌机摩擦轮轮皮 | 1 | |
| 4 | Robodyno Pro轮毂零件 | 1 | |
| 5 | 3D打印轮毂外圈 | 1 | PLA |
| 6 | Robodyno Pro轮架外板 | 1 | 铝 |
| 7 | Robodyno Pro轮架侧板 | 1 | 铝 |
| 8 | Robodyno Pro轮架顶板 | 1 | 铝 |
| 9 | M2.5*15螺丝 | 9 | 不锈钢 |
| 10 | Robodyno Pro电机线 | 1 | |
| 11 | ESP32控制器 | 1 | ESP32-Pico-D4芯片 |
| 12 | TFT3.5通信转接板 | 1 | 安装在ESP32控制器外壳中 |
附:开源资料
| 资料清单 | |
| 序号 | 内容 |
| 1 | 【A004】-程序源代码 |
| 2 | 【A004】-电路原理图 |
| 3 | 【A004】-控制器电路板生产文件 |
| 4 | 【A004】-控制器外壳3D打印文件 |
| 5 | 控制器固件 |
更多资料内容下载详见 【A004】滑板助力器项目
相关文章:
机器人制作开源方案 | 滑板助力器
我们可以用一块废滑板做些什么呢? 如今,越来越多的人选择电动滑板作为代步工具或娱乐方式,市场上也涌现出越来越多的电动滑板产品。 (图片来源:Backfire Zealot X Belt Drive Electric Skateboard– Backfire Board…...
飞机打方块(二)游戏界面制作
一、背景 1.新建bg节点 二、飞机节点功能实现 1.移动 1.新建plane节点 2.新建脚本GameController.ts,并绑定Canvas GameControll.ts const { ccclass, property } cc._decorator;ccclass export default class NewClass extends cc.Component {property(cc.Node)canvas:…...
和召回(recall))
自我理解:精度(precision)和召回(recall)
1、精度(precision) 精度是用于评估分类模型的一个重要指标。它反映了模型预测为正例的样本中,实际真正为正例样本的比例。 【注】正例样本指在二分类问题中,被标注为正类的样本。 例如:在垃圾邮件分类任务中,正例样本就是真实的…...
)
Nginx 使用 HTTPS(准备证书和私钥)
文章目录 Nginx生成自签名证书和配置Nginx HTTPS(准备证书和私钥)准备证书和私钥 Nginx生成自签名证书和配置Nginx HTTPS(准备证书和私钥) 准备证书和私钥 生成私钥 openssl genrsa -des3 -out server.key 2048这会生成一个加密…...
Java:集合框架:Set集合、LinkedSet集合、TreeSet集合、哈希值、HashSet的底层原理
Set集合 创建一个Set集合对象,因为Set是一个接口不能直接new一个对象,所以要用一个实现类来接 HashSet来接 无序性只有一次,只要第一次运行出来后,之后再运行的顺序还是第一次的顺序。 用LinkedSet来接 有序 不重复 无索引 用Tree…...

自定义Taro的navBar的宽度和高度
本方法是计算自定义navbar的宽度和高度,输出的参数有 navBarHeight, menuBottom,menuHeight, menuRectWidth,windowWidth, windowHeight,具体代码如下: export function getCustomNavBarRect():| {navBarHeight: number;menuBottom: number;menuHeight:…...

用Python编程实现百度自然语言处理接口的对接,助力你开发智能化处理程序
用Python编程实现百度自然语言处理接口的对接,助力你开发智能化处理程序 随着人工智能的不断进步,自然语言处理(Natural Language Processing,NLP)成为了解决文本处理问题的重要工具。百度自然语言处理接口提供了一系…...
系统架构设计专业技能 · 系统工程与系统性能
系列文章目录 系统架构设计专业技能 网络技术(三) 系统架构设计专业技能 系统安全分析与设计(四)【系统架构设计师】 系统架构设计高级技能 软件架构设计(一)【系统架构设计师】 系统架构设计高级技能 …...

初识网络原理(笔记)
目录 编辑局域网 网络通信基础 IP 地址 端口号 协议 协议分层 TCP / IP 五层网络模型 网络数据传输的基本流程 发送方的情况: 接收方的情况 局域网 搭建网络的时候,需要用到 交换机 和 路由器 路由器上,有 lan 口 和 wan 口 虽…...
嵌入式C语言基本操作方法之经典
C语言一经出现就以其功能丰富、表达能力强、灵活方便、应用面广等特点迅速在全世界普及和推广。 C语言不但执行效率高而且可移植性好,可以用来开发应用软件、驱动、操作系统等。 C语言也是其它众多高级语言的鼻祖语言,所以说学习C语言是进入编程世界的必…...

postgresql \watch实用的使用方法
文章目录 1.介绍2.语法3.实用的使用方法3.1 慢sql监控3.2 长wait事件3.3 日志输出量3.3结合pg_stat_database使用3.4 结合pg_stat_bgwriter使用3.5 其他 1.介绍 \watch Postgres 9.3 版带来的一个有用的命令,与linux watch指令类似,可以帮我们在指定间隔…...

Cocos2d 项目问题记录
环境搭建 正常运行 Android 端的 Cocos2d 项目,本机至少需要 Android SDK、NDK 环境、Android Studio 项目报错总结 CMake Error: CMake was unable to find a build program corresponding to "Ninja" 默认创建工程的 gradle.tools 版本为 3.1.0&…...

系统架构合理性的思考 | 京东云技术团队
最近牵头在梳理部门的系统架构合理性,开始工作之前,我首先想到的是如何定义架构合理性? 从研发的角度来看如果系统上下文清晰、应用架构设计简单、应用拆分合理应该称之为架构合理。 基于以上的定义可以从以下三个方面来梳理评估࿱…...

Amelia预订插件:WordPress企业级预约系统
并非所有WordPress预订插件都像他们所设计的那样。其中一些缺乏运行高效预约操作所需的功能,而其他一些则看起来陈旧过时。您不需要其中任何一个,但Amelia预订插件似乎希望确保所有用户都对功能和风格感到满意。 在这篇Amelia企业级预约系统插件评测中&…...
共享门店模式:线下门店的商家如何利用它增加客户
随着数字化时代的到来,商业模式正在不断创新与演变,而共享经济正成为引领这一变革的重要力量。在这个大背景下,共享门店模式作为共享经济的一种体现,正在逐渐走进人们的生活,并为商家和消费者带来了新的商机和体验。 共…...

实现矩阵地图与rviz地图重合
文章目录 一、rviz地图转换矩形地图(只能用于全局规划)二、在rviz上显示地图边界信息,可视化调整,实现重合(只能用于局部规划)一、rviz地图转换矩形地图(只能用于全局规划) 此方法矩形地图可能会与rviz地图不重合,通过改变偏移量x_offset,y_offset接近地图 可以将矩…...
)
设计模式十九:备忘录模式(Memento Pattern)
备忘录模式是一种行为型设计模式,它允许对象在不暴露其内部状态的情况下捕获和恢复其状态。该模式的主要目标是在不破坏封装性的前提下,实现对象状态的备份和恢复。备忘录模式常用于需要保存对象历史状态、撤销操作或者实现快照功能的情况。 备忘录模式…...

【题解】二叉搜索树与双向链表
二叉搜索树与双向链表 题目链接:二叉搜索树与双向链表 解题思路1:递归中序遍历 首先题目最后要求的是一个的递增的双向链表,而二叉搜索树也是一类非常有特色的树,它的根节点大于所有左侧的节点,同时又小于所有右侧的…...

【真实案例】解决后端接口调用偶尔超时问题
文章目录 背景分析代码分析二次日志分析排查Gateway服务解决解决办法1:添加重试机制解决办法2:优化网关内存分配解决办法3:调整OOM策略背景 项目从虚拟机迁移到k8s云原生平台(RainBond)后,发现偶尔会出现接口调用超时的问题。 统计了一下从上线到现在近一个月的调用失败…...

操作符详解(1)
1. 操作符分类: 算术操作符 移位操作符 位操作符 赋值操作符 单目操作符 关系操作符 逻辑操作符 条件操作符 逗号表达式 下标引用、函数调用和结构成员 2. 算术操作符 - * / % 1. 除了 % 操作符之外,其他的几个操作符可以作用于整数和浮点数。 2. 对…...

AI绘画自动化:从批量生成到Pixiv发布的半自动工具实践
1. 项目概述:从手动到自动,解放AI绘画生产力的全流程工具 如果你是一名深度使用NovelAI或Stable Diffusion这类AI绘画工具的创作者,那么你一定对“批量生成”和“自动发布”这两个词背后的痛楚深有体会。每次生成图片,你都需要在W…...

Taotoken用量看板如何帮助开发者清晰掌握消费明细
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken用量看板如何帮助开发者清晰掌握消费明细 对于使用大模型API的开发者而言,成本控制与预算管理是项目持续运营的…...

Hotkey Detective:5分钟找到偷走你快捷键的“元凶“
Hotkey Detective:5分钟找到偷走你快捷键的"元凶" 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你…...

TikTok评论采集工具:如何轻松获取海量用户反馈数据?
TikTok评论采集工具:如何轻松获取海量用户反馈数据? 【免费下载链接】TikTokCommentScraper 项目地址: https://gitcode.com/gh_mirrors/ti/TikTokCommentScraper 在社交媒体分析领域,TikTok评论数据蕴含着丰富的用户洞察价值&#x…...
)
SITS 2026议程背后隐藏的3条技术演进红线(附Gartner/IEEE双认证时间轴对比图)
更多请点击: https://intelliparadigm.com 第一章:2026奇点智能技术大会完整议程曝光:SITS 2026四大看点抢先看 全球瞩目的奇点智能技术大会(Singularity Intelligence Technology Summit, SITS)将于2026年5月12–15日…...

MAX86150 ECG/PPG数据采集实战:基于STM32F103的FIFO配置与多传感器数据融合解析
MAX86150 ECG/PPG数据采集实战:基于STM32F103的FIFO配置与多传感器数据融合解析 在可穿戴健康监测设备的开发中,如何高效处理多通道生物信号是工程师面临的核心挑战。MAX86150作为一款集成了ECG(心电图)和PPG(光电容积…...

Claude Code开发者如何通过Taotoken解决API限流与账号封禁问题
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Claude Code开发者如何通过Taotoken解决API限流与账号封禁问题 对于依赖Claude Code进行日常编程辅助的开发者而言,工具…...
)
告别访问失败!手把手教你用中标麒麟OS挂载Win10的SMB共享(附终端挂载命令)
中标麒麟OS与Win10 SMB共享深度配置指南:从原理到实战避坑 在跨平台协作成为常态的今天,Linux与Windows系统间的文件共享已成为运维人员的必备技能。中标麒麟作为国产操作系统的代表,其与Windows的SMB协议互通却常因配置细节不到位而引发&quo…...

人工智能逻辑复兴与全球教育变革战略提案
人工智能逻辑复兴与全球教育变革战略提案摘要: 本提案基于贾子哲学,提出《人工智能逻辑复兴支持计划》,终结暴力计算与数据殖民,以“真理硬度”“语义主权”为核心,推动算力霸权降级与公理化革命。分析产业界将经历“物…...

非线性状态空间模型并行化:DEER方法与Lyapunov指数分析
1. 非线性状态空间模型的并行化挑战与DEER方法在序列建模和时序数据处理领域,状态空间模型(SSM)因其对长程依赖关系的建模能力而备受关注。然而,传统SSM的序列化计算方式(即每一步计算都依赖于前一步的结果)严重制约了其在现代硬件…...