STM32入门——IIC通讯
江科大STM32学习记录
I2C通信
- I2C(Inter IC Bus)是由Philips公司开发的一种通用数据总线
- 两根通信线:SCL(Serial Clock)、SDA(Serial Data)
- 同步,半双工
- 带数据应答
- 支持总线挂载多设备(一主多从、多主多从)
硬件电路 - 所有I2C设备的SCL连在一起,SDA连在一起
- 设备的SCL和SDA均要配置成开漏输出模式
- SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
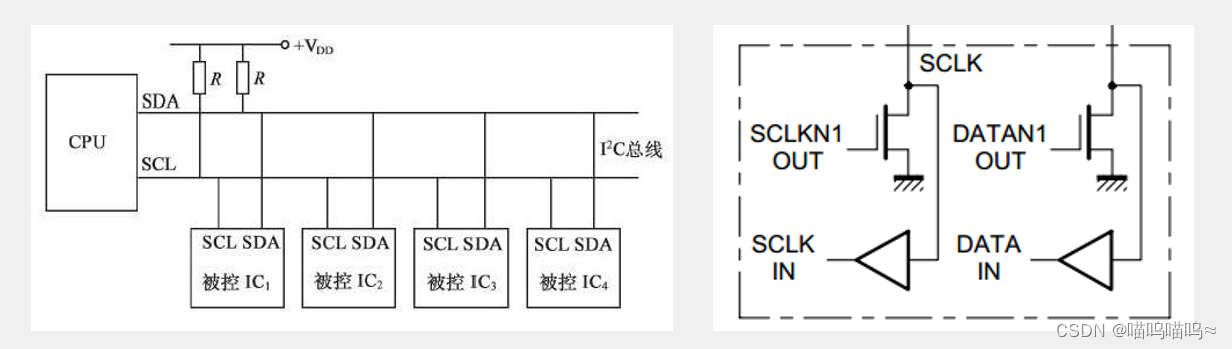
- *IIC的SCL和SDA要配置成开漏输出,开漏与弱上拉的模式
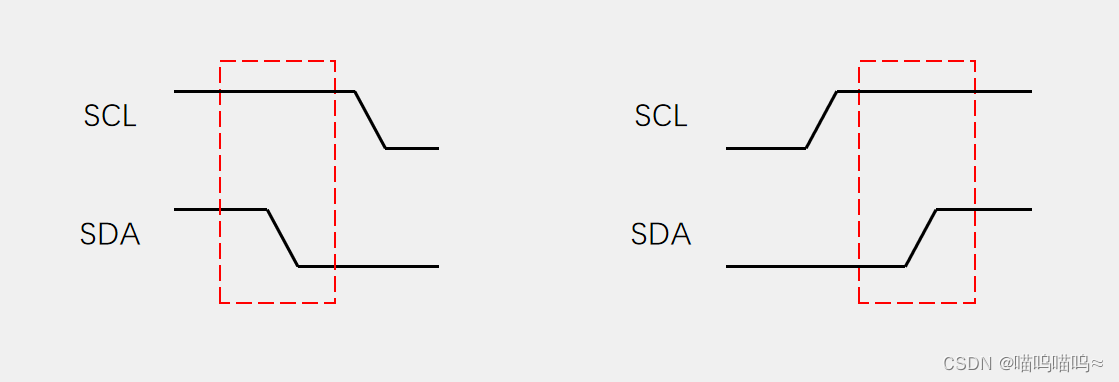
I2C时序基本单元
- 起始条件:SCL高电平期间,SDA从高电平切换到低电平
- 终止条件:SCL高电平期间,SDA从低电平切换到高电平
void myIIC_Start(void)//SCL高电平期间,sda产生一个下升沿
{Set_SDA(1);Set_SCL(1);Set_SDA(0);Set_SCL(0);}void myIIC_Stop(void)//SCL高电平期间,sda产生一个上升沿
{Set_SCL(1);Set_SDA(0);Set_SDA(1);
}
I2C时序基本单元
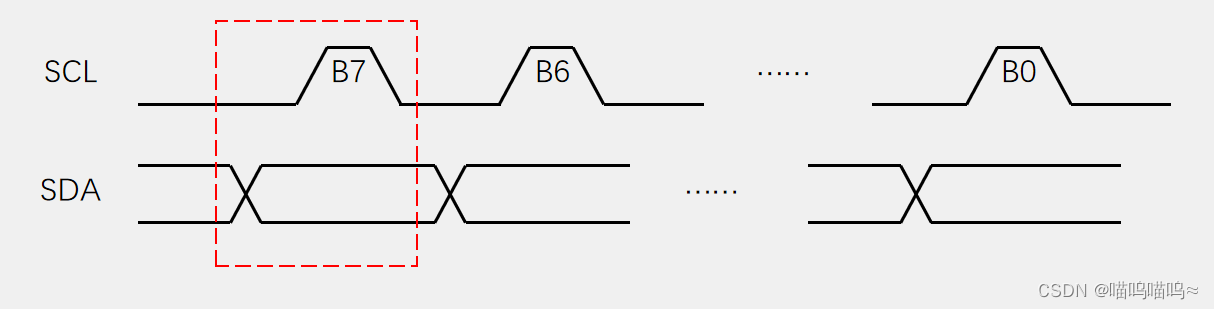
- 发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节
void myIIC_SendByte(uint8_t Byte)//SCL低电平,主机把数据放到SDA线上,SCL高电平,从机读取SDA上的数据
{uint8_t i;for(i=0;i<8;i++){Set_SDA(Byte & (0x80>>i));Set_SCL(1); Set_SCL(0); }
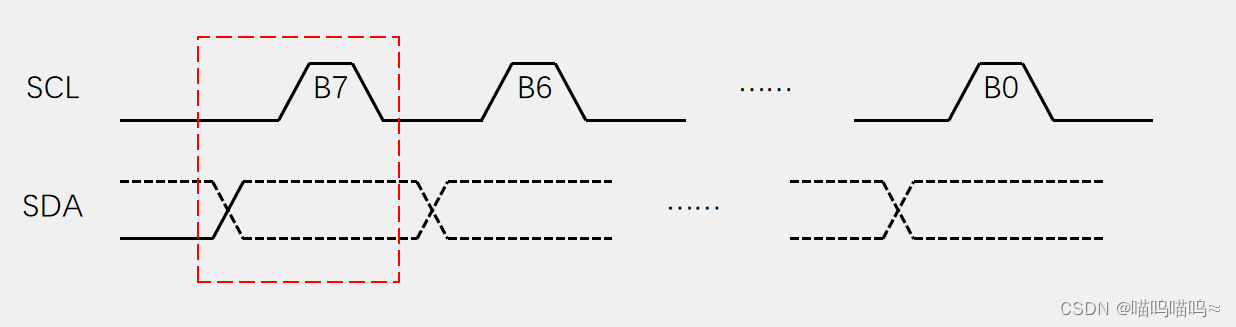
}I2C时序基本单元
- 接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)
uint8_t myIIC_ReceByte(void)//SCL低电平,从机把数据放到SDA线上,SCL高电平,主机读取SDA上的数据
{uint8_t Rece_Byte = 0x00;uint8_t i;Set_SDA(1);//释放sda总线for(i=0;i<8;i++){Set_SCL(1);if(Read_SDA() == 1){Rece_Byte |= (0x80 >> i);}Set_SCL(0); }return Rece_Byte;}
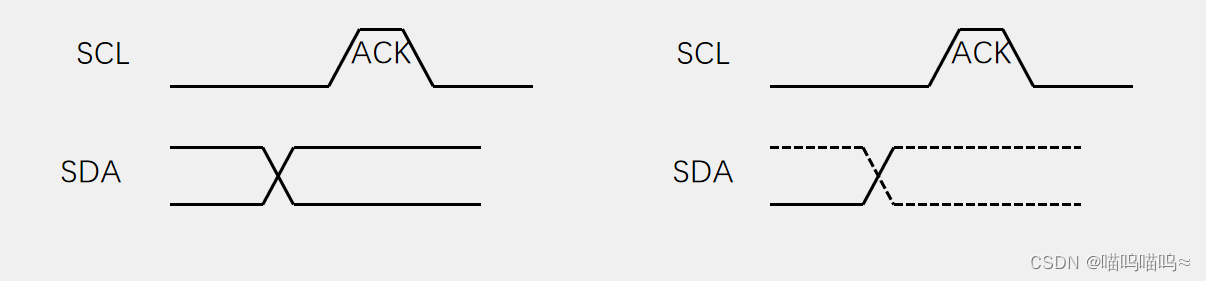
- 发送应答:主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
- 接收应答:主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
void myIIC_SendACK(uint8_t AckBit)
{Set_SDA(AckBit);Set_SCL(1); Set_SCL(0);
}uint8_t myIIC_ReceACK(void)
{uint8_t AckBit;Set_SDA(1);//释放sda总线Set_SCL(1);AckBit = Read_SDA();Set_SCL(0); return AckBit;
}I2C时序
- 指定地址写
- 对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
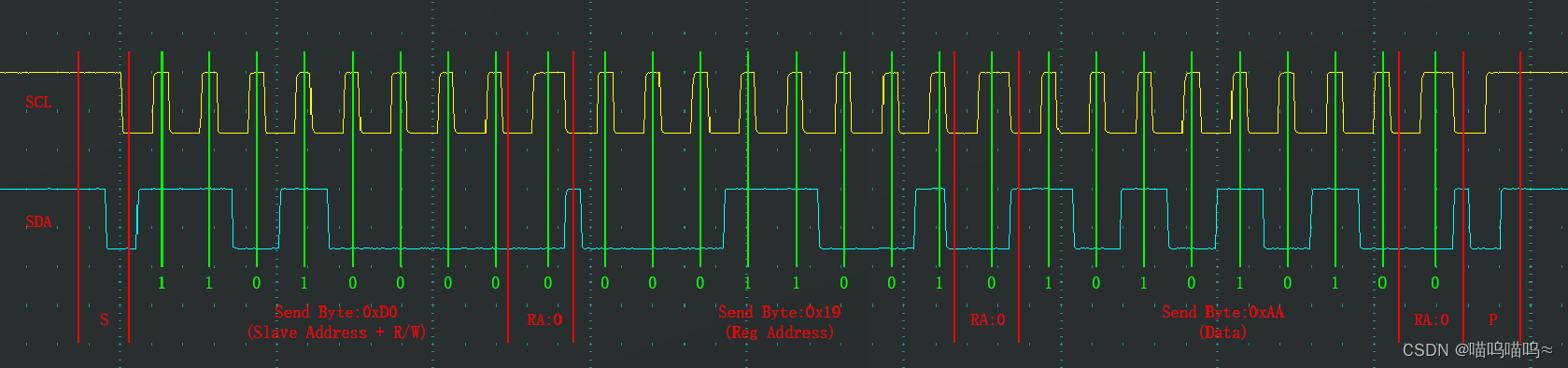
发送的第一个字节为从机地址加读写位,高七位为从机地址,最低位为读写位(0表示要写入;1表示要读出)
void Specify_Address_Write(uint8_t Slave,uint8_t RegAddress,uint8_t Data)
{myIIC_Start();myIIC_SendByte(Slave);myIIC_ReceACK();myIIC_SendByte(RegAddress);myIIC_ReceACK();myIIC_SendByte(Data);myIIC_ReceACK();myIIC_Stop();}
- 当前地址读
- 对于指定设备(Slave Address),在当前地址指针指示的地址下,读取从机数据(Data)

- 指定地址读
- 对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)

uint8_t Specify_Address_Read(uint8_t Slave,uint8_t RegAddress)
{uint8_t temp;myIIC_Start();myIIC_SendByte(Slave);myIIC_ReceACK();myIIC_SendByte(RegAddress);myIIC_ReceACK();
//上面为指定地址myIIC_Start();//重复起始myIIC_SendByte(Slave | 0x01);//低位1表示读操作myIIC_ReceACK();temp = myIIC_ReceByte();myIIC_SendACK(1);//不应答myIIC_Stop();return temp;MPU6050简介
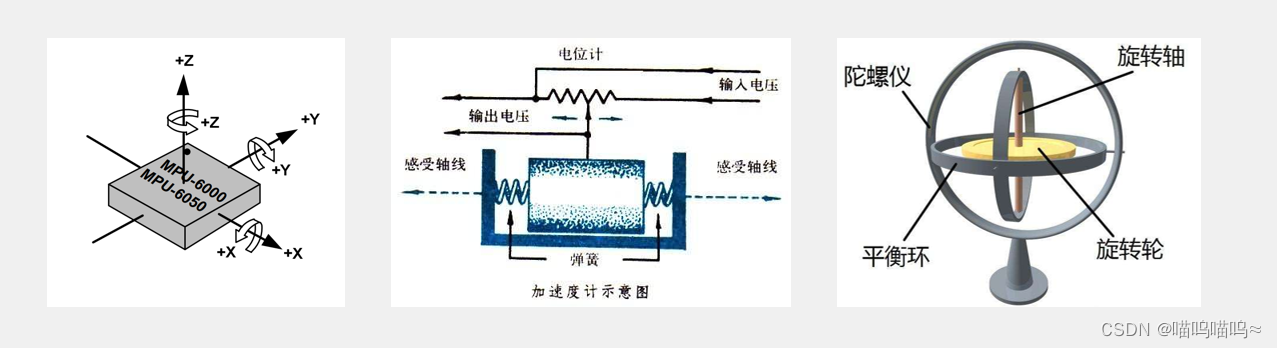
- MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景
- 3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
- 3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
MPU6050参数 - 16位ADC采集传感器的模拟信号,量化范围:-32768~32767
- 加速度计满量程选择:±2、±4、±8、±16(g)
- 陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
- 可配置的数字低通滤波器
- 可配置的时钟源
- 可配置的采样分频
- I2C从机地址:1101000(AD0=0) 1101001(AD0=1)
硬件电路


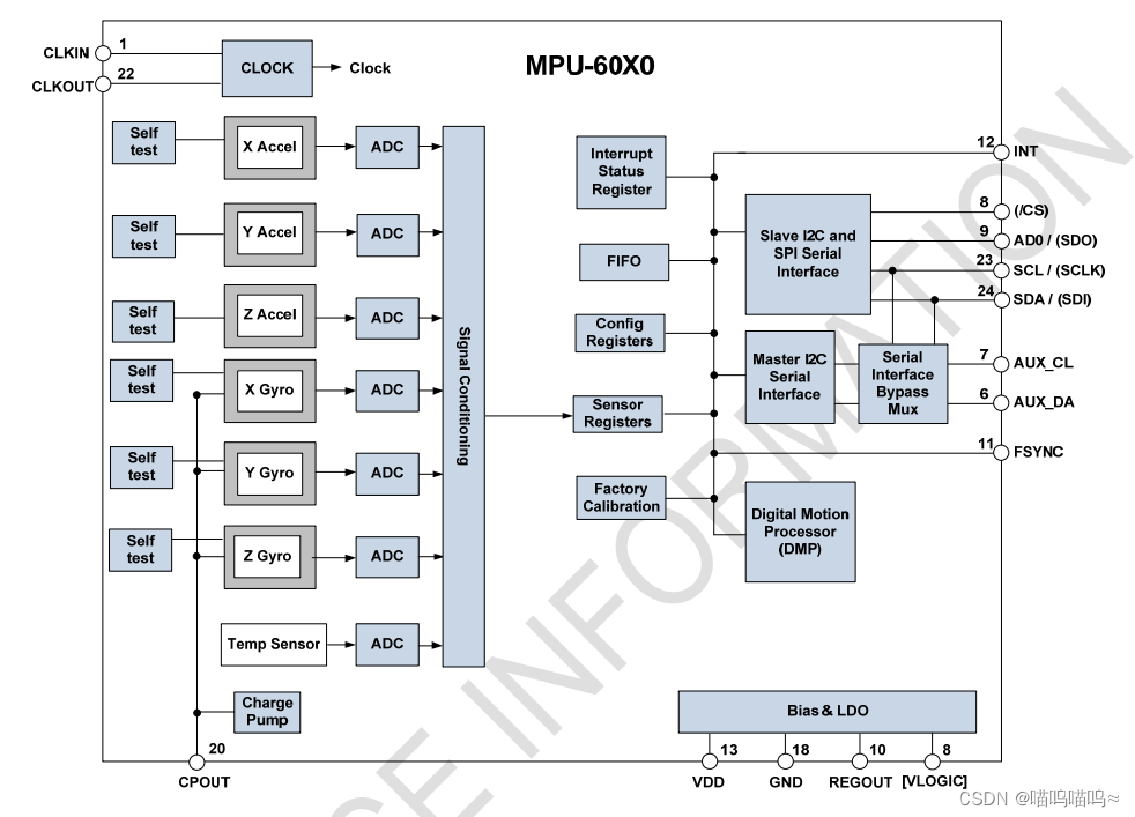
MPU6050框图
案例:获取xyz加速度值和陀螺仪值
#include "MPU6050.h"void MPU6050_Init(void)
{myIIC_Init();Specify_Address_Write(MPU6050_Address,MPU6050_PWR_MGMT_1,0x01);Specify_Address_Write(MPU6050_Address,MPU6050_PWR_MGMT_2,0x00);Specify_Address_Write(MPU6050_Address,MPU6050_SMPLRT_DIV,0x09);Specify_Address_Write(MPU6050_Address,MPU6050_CONFIG,0x06);Specify_Address_Write(MPU6050_Address,MPU6050_GYRO_CONFIG,0x18);Specify_Address_Write(MPU6050_Address,MPU6050_ACCEL_CONFIG,0x18);}uint8_t MCU6050_GetID(void)
{return Specify_Address_Read(MPU6050_Address,MPU6050_WHO_AM_I);}void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t data_H;uint8_t data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_XOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_XOUT_L);*AccX = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_YOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_YOUT_L);*AccY = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_ZOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_ZOUT_L);*AccZ = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_XOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_XOUT_L);*GyroX = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_YOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_YOUT_L);*GyroY = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_ZOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_ZOUT_L);*GyroZ = (data_H<<8) | data_L;}
#ifndef _MPU6050_H
#define _MPU6050_H
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "myIIC.h"
#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75
#define MPU6050_Address 0xD0void MPU6050_Init(void);
uint8_t MCU6050_GetID(void);
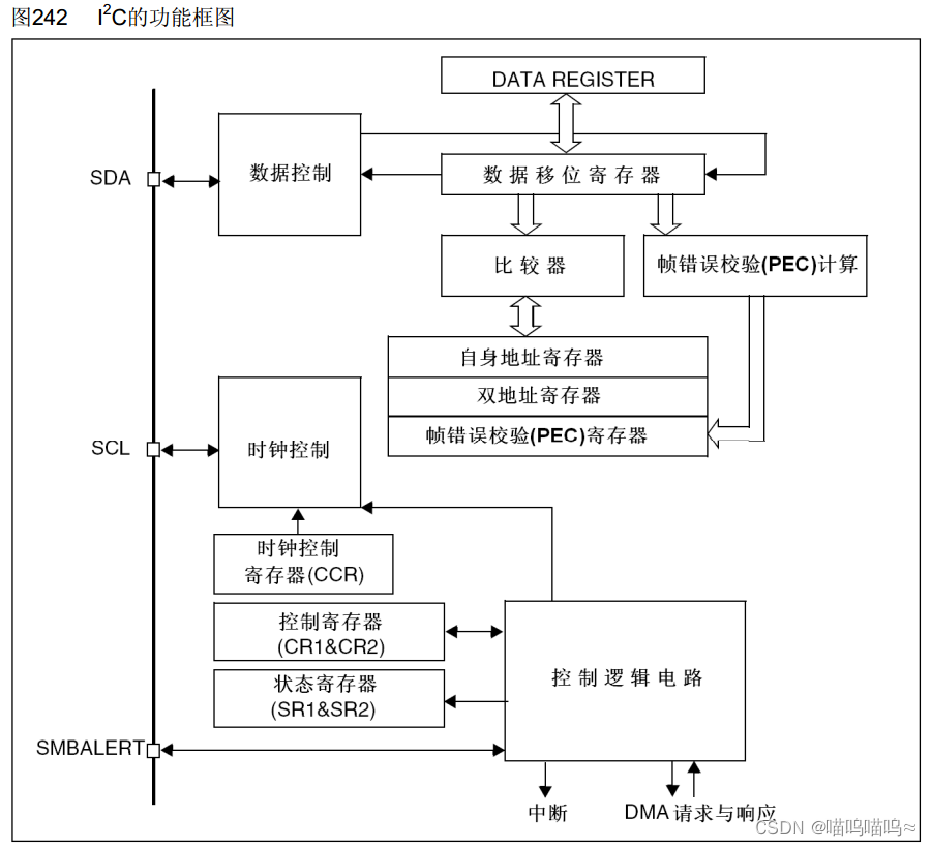
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);#endif硬件I2C通信
- STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
- 支持多主机模型
- 支持7位/10位地址模式
- 支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
- 支持DMA
- 兼容SMBus协议
- STM32F103C8T6 硬件I2C资源:I2C1、I2C2
I2C框图
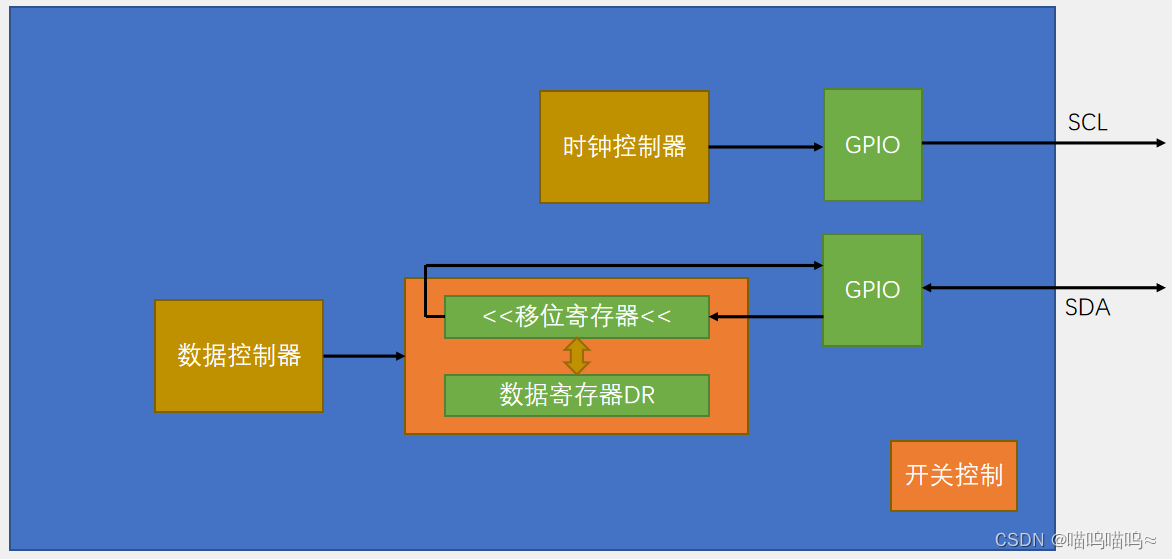
I2C基本结构
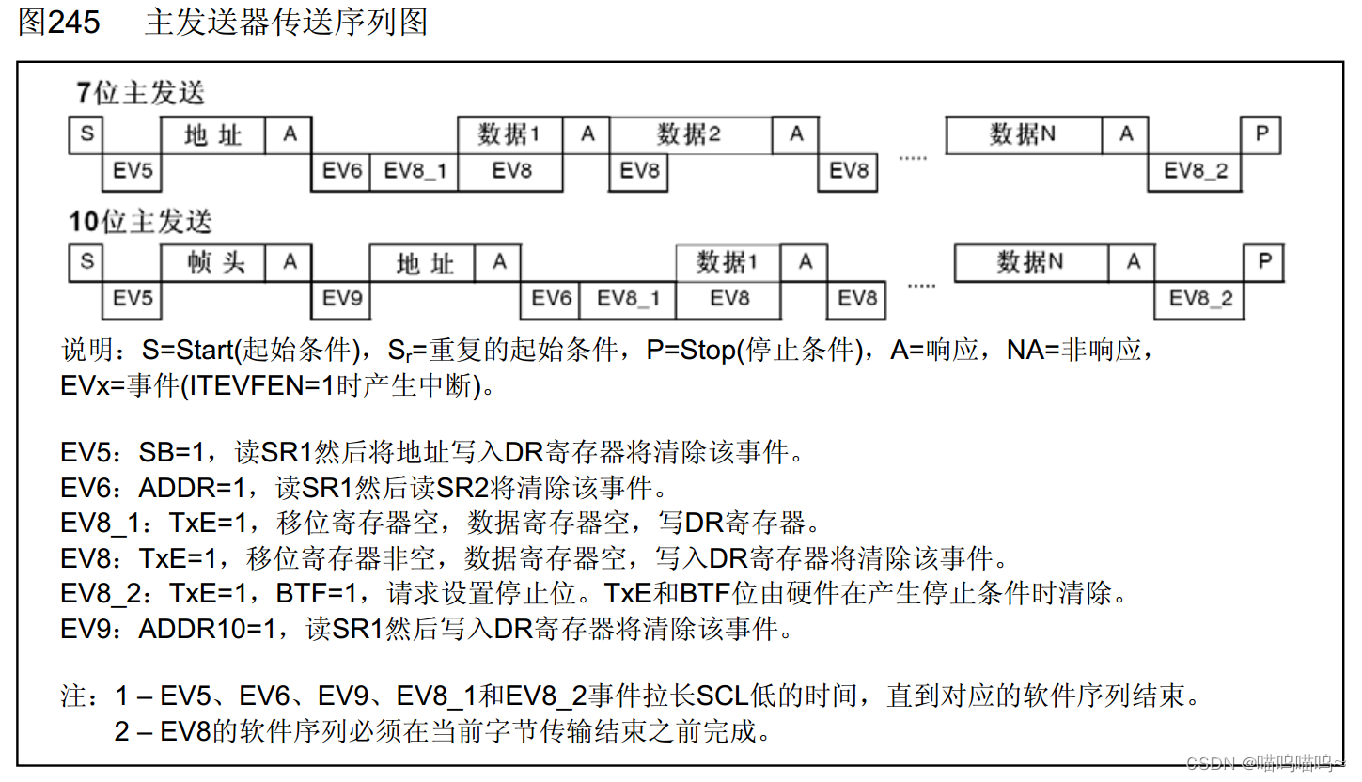
主机发送
//超时退出机制uint8_t Check_Timeout(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{uint32_t time = 5000;while(I2C_CheckEvent(I2Cx,I2C_EVENT) != SUCCESS){time -- ;if(time == 0){return Timeout;}}return SUCCESS;
}void Specify_Address_Write(uint8_t Slave,uint8_t RegAddress,uint8_t Data)
{I2C_GenerateSTART(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_MODE_SELECT);I2C_Send7bitAddress(I2C2,Slave,I2C_Direction_Transmitter);Check_Timeout(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);I2C_SendData(I2C2,RegAddress);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTING);I2C_SendData(I2C2,Data);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED);I2C_GenerateSTOP(I2C2,ENABLE);}
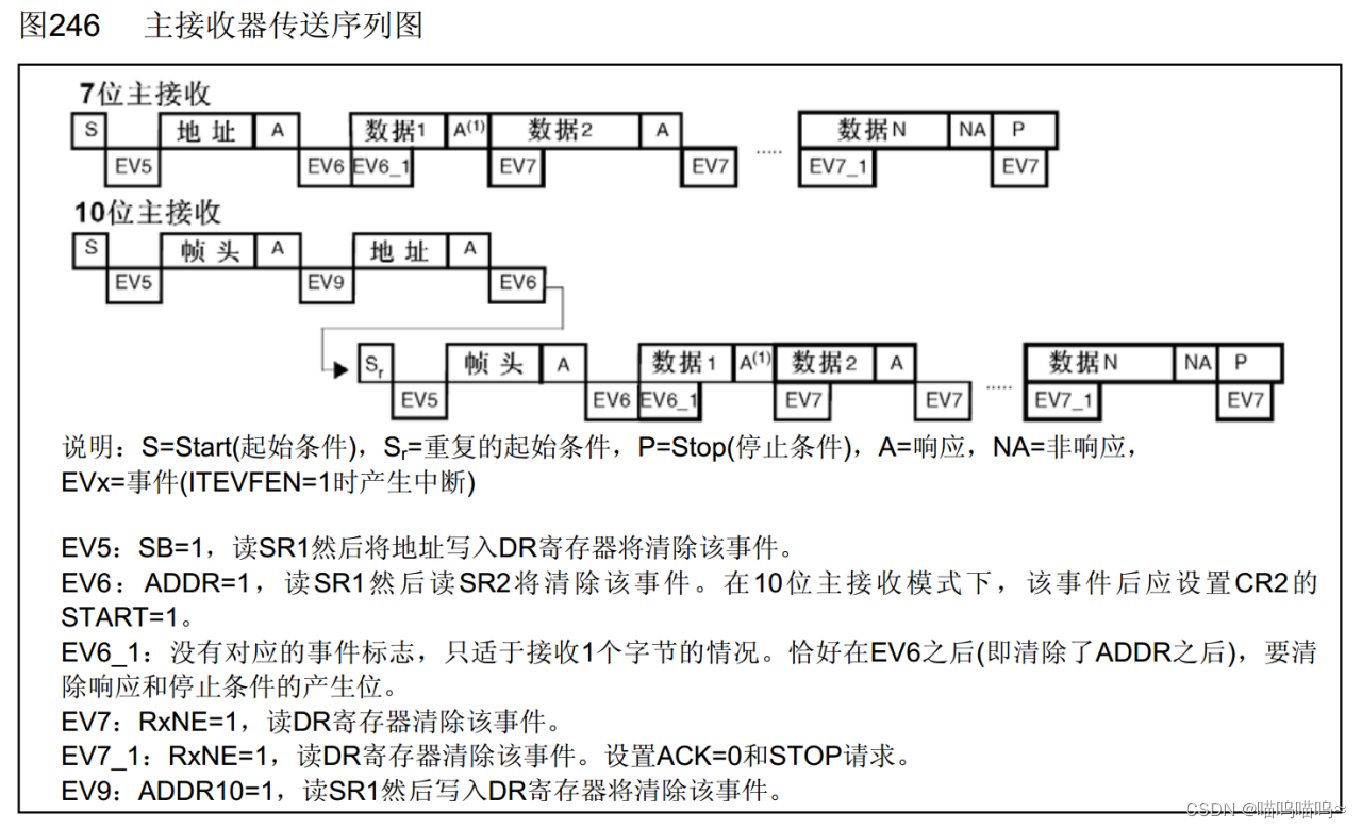
主机接收
uint8_t Specify_Address_Read(uint8_t Slave,uint8_t RegAddress)
{uint8_t ReceData;I2C_GenerateSTART(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_MODE_SELECT);I2C_Send7bitAddress(I2C2,Slave,I2C_Direction_Transmitter);Check_Timeout(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);I2C_SendData(I2C2,RegAddress);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED);I2C_GenerateSTART(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_MODE_SELECT);I2C_Send7bitAddress(I2C2,Slave,I2C_Direction_Receiver);Check_Timeout(I2C2,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);I2C_AcknowledgeConfig(I2C2,DISABLE);I2C_GenerateSTOP(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_RECEIVED);ReceData = I2C_ReceiveData(I2C2);I2C_AcknowledgeConfig(I2C2,ENABLE);return ReceData;
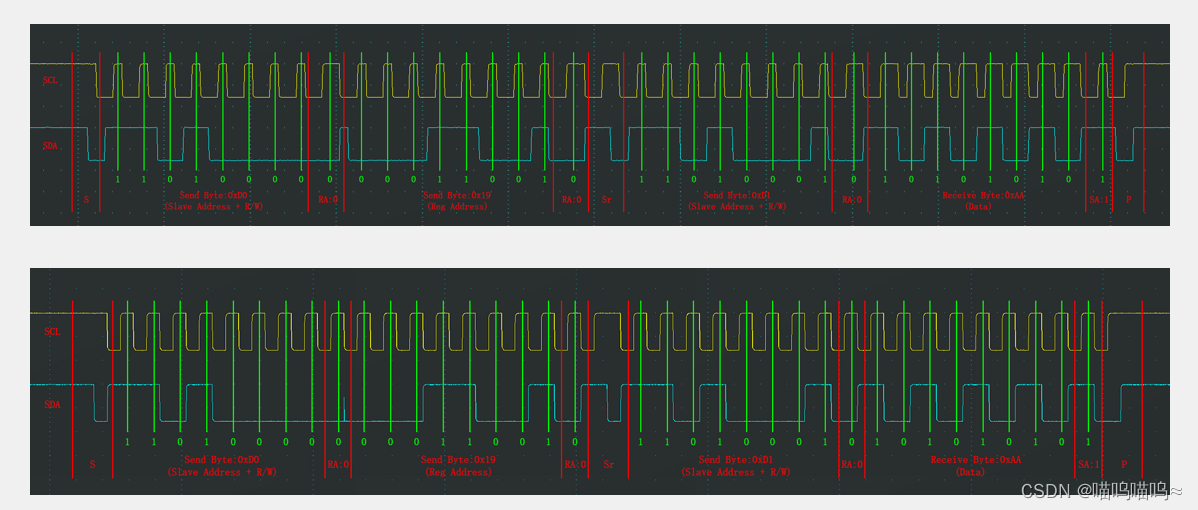
}软件/硬件波形对比
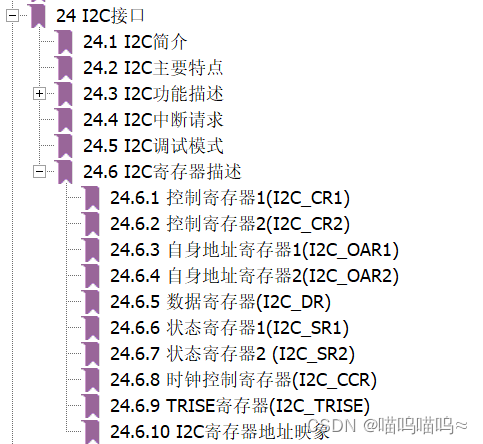
硬件I2C相关寄存器
硬件I2C读取MPU6050数据
#include "I2C.h"void I2C_init(void)
{//开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//GPIO初始化GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;//复用开漏模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11);I2C_InitTypeDef I2C_InitStructure;I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;//指定I2C模式。I2C_InitStructure.I2C_ClockSpeed = 200000;//指定时钟频率I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;//作为从机地址为7位I2C_InitStructure.I2C_OwnAddress1 = 0x00;//作为从机自身地址I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;//指定I2C快速模式占空比I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;I2C_Init(I2C2,&I2C_InitStructure);I2C_Cmd(I2C2,ENABLE);}//超时退出机制uint8_t Check_Timeout(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{uint32_t time = 5000;while(I2C_CheckEvent(I2Cx,I2C_EVENT) != SUCCESS){time -- ;if(time == 0){return Timeout;}}return SUCCESS;
}void Specify_Address_Write(uint8_t Slave,uint8_t RegAddress,uint8_t Data)
{I2C_GenerateSTART(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_MODE_SELECT);I2C_Send7bitAddress(I2C2,Slave,I2C_Direction_Transmitter);Check_Timeout(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);I2C_SendData(I2C2,RegAddress);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTING);I2C_SendData(I2C2,Data);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED);I2C_GenerateSTOP(I2C2,ENABLE);}uint8_t Specify_Address_Read(uint8_t Slave,uint8_t RegAddress)
{uint8_t ReceData;I2C_GenerateSTART(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_MODE_SELECT);I2C_Send7bitAddress(I2C2,Slave,I2C_Direction_Transmitter);Check_Timeout(I2C2,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);I2C_SendData(I2C2,RegAddress);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_TRANSMITTED);I2C_GenerateSTART(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_MODE_SELECT);I2C_Send7bitAddress(I2C2,Slave,I2C_Direction_Receiver);Check_Timeout(I2C2,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//接收的最后一个字节之前就要不应答和发送终止信号I2C_AcknowledgeConfig(I2C2,DISABLE);I2C_GenerateSTOP(I2C2,ENABLE);Check_Timeout(I2C2,I2C_EVENT_MASTER_BYTE_RECEIVED);//接收到事件后一个字节就传到DR寄存器了ReceData = I2C_ReceiveData(I2C2);I2C_AcknowledgeConfig(I2C2,ENABLE);return ReceData;
}void MPU6050_Init(void)
{I2C_init();Specify_Address_Write(MPU6050_Address,MPU6050_PWR_MGMT_1,0x01);Specify_Address_Write(MPU6050_Address,MPU6050_PWR_MGMT_2,0x00);Specify_Address_Write(MPU6050_Address,MPU6050_SMPLRT_DIV,0x09);Specify_Address_Write(MPU6050_Address,MPU6050_CONFIG,0x06);Specify_Address_Write(MPU6050_Address,MPU6050_GYRO_CONFIG,0x18);Specify_Address_Write(MPU6050_Address,MPU6050_ACCEL_CONFIG,0x18);}
uint8_t MCU6050_GetID(void)
{return Specify_Address_Read(MPU6050_Address,MPU6050_WHO_AM_I);}void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t data_H;uint8_t data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_XOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_XOUT_L);*AccX = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_YOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_YOUT_L);*AccY = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_ZOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_ACCEL_ZOUT_L);*AccZ = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_XOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_XOUT_L);*GyroX = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_YOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_YOUT_L);*GyroY = (data_H<<8) | data_L;data_H = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_ZOUT_H);data_L = Specify_Address_Read(MPU6050_Address,MPU6050_GYRO_ZOUT_L);*GyroZ = (data_H<<8) | data_L;}相关文章:
STM32入门——IIC通讯
江科大STM32学习记录 I2C通信 I2C(Inter IC Bus)是由Philips公司开发的一种通用数据总线两根通信线:SCL(Serial Clock)、SDA(Serial Data)同步,半双工带数据应答支持总线挂载多设备…...
DTC 19服务学习2
紧跟上篇 0x04 reportDTCSnapshotRecordByDTCNumber 通过DTC和快照序列来获取DTC快照记录。 适用以下假设: — 服务器支持存储给定 DTC 的两个 DTCSnapshot 记录的能力。 — 此示例假定是上一个示例的延续。 — 假设服务器请求服务器存储的 DTC 编号 123456 的两个…...

【腾讯云 TDSQL-C Serverless 产品体验】基于腾讯云轻量服务器以及 TDSQL-C 搭建 LNMP WordPress 博客系统
文章目录 一、前言二、数据库发展与云原生数据库2.1 数据库发展简介2.2 云原生数据库简介2.2.1 云数据库与云原生数据库区别 三、腾讯云 TDSQL-C 数据库3.1 什么是腾讯云 TDSQL-C 数据库3.2 为什么推出 TDSQL-C 数据库?传统 MySQL 架构存在较多痛点3.2.1 传统 MySQL…...

【vue3】对axios进行封装,方便更改路由并且可以改成局域网ip访问(附代码)
对axios封装是在main.js里面进行封装,因为main.js是一个vue项目的入口 步骤: 在1处创建一个axios实例为http,baseURL是基础地址(根据自己的需求写),写了这个在vue界面调用后端接口时只用在post请求处写路由…...
Java IO流(三)线程模型
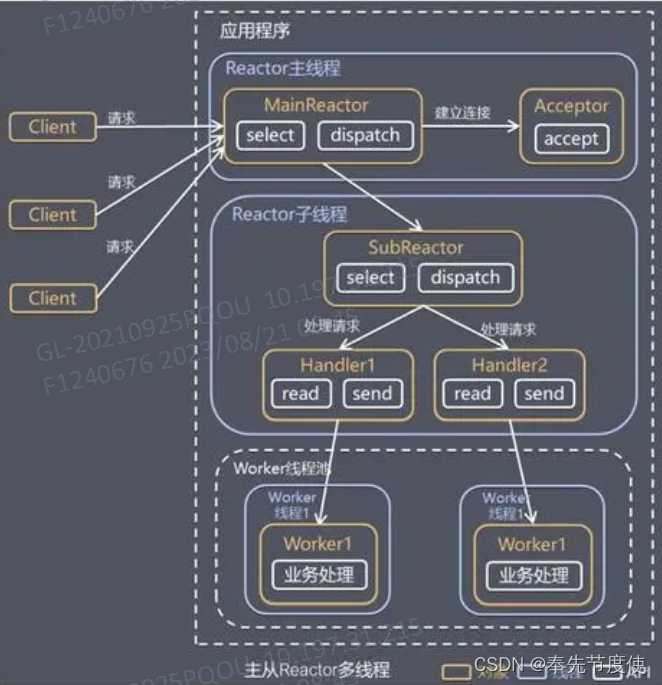
传统阻塞I/O模式 其中黄色框表示对象,蓝色框表示线程,白色框表示API方法 特点 采用阻塞IO模式获取输入数据每个连接都需要独立的线程完成数据的输入,业务处理和处理结果数据返回 潜在问题 并发数很大时,需要对应每个连接请求创建一个线程,所以占用资源很大连接创建后,若当前…...
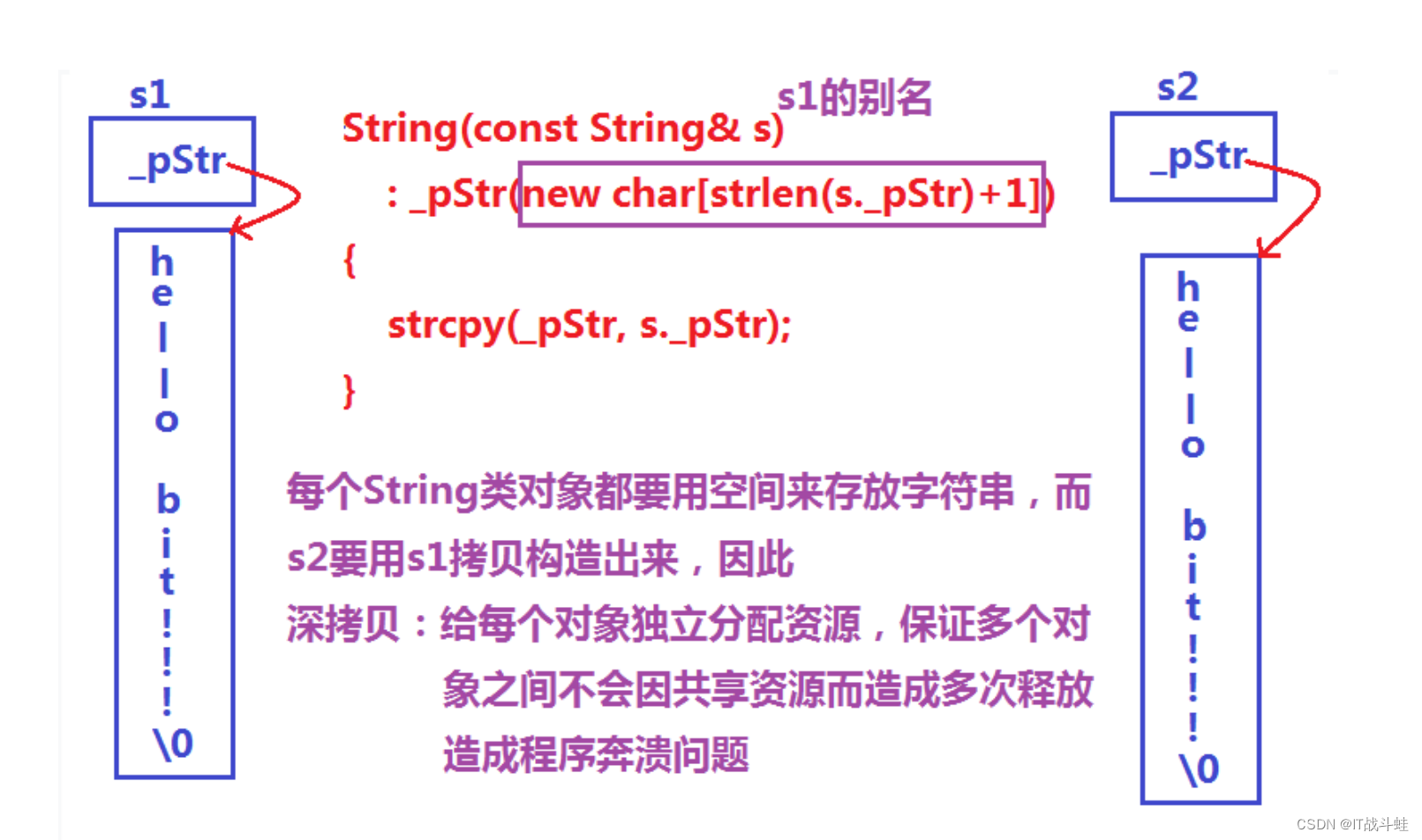
string(模拟实现与深拷贝)
目录 深拷贝与浅拷贝 浅拷贝: 深拷贝 写时拷贝(了解) 模拟实现 准备 完整代码 深拷贝与浅拷贝 浅拷贝: 也称位拷贝,编译器只是将对象中的值拷贝过来。如果对象中管理资源,最后就会导致多个对象共享同一份资源,当一…...

5.Vue_Element
文章目录 1 Ajax1.1 Ajax介绍1.1.1 Ajax概述1.1.2 Ajax作用1.1.3 同步异步 1.2 Axios1.2.1 Axios的基本使用1.2.2 Axios请求方法的别名 2 前端工程化2.1 前端工程化特点2.2 Vue项目开发流程 3 Vue组件库Element3.1 Element介绍 1 Ajax 1.1 Ajax介绍 1.1.1 Ajax概述 Ajax: 全…...

链路追踪jaeger
这里的链路指的是客户端向服务发起一个请求,该请求所经过的路线,也可以说是该请求经过的流量 例如: 客户端发起一个下订单的请求其流量过程: request—>service—>order-web—>order_srv—>mysql—>order_srv—&…...

神经网络基础-神经网络补充概念-42-梯度检验
概念 梯度检验(Gradient Checking)是一种验证数值计算梯度与解析计算梯度之间是否一致的技术,通常用于确保实现的反向传播算法正确性。在深度学习中,通过梯度检验可以帮助验证你的神经网络模型是否正确地计算了梯度,从…...
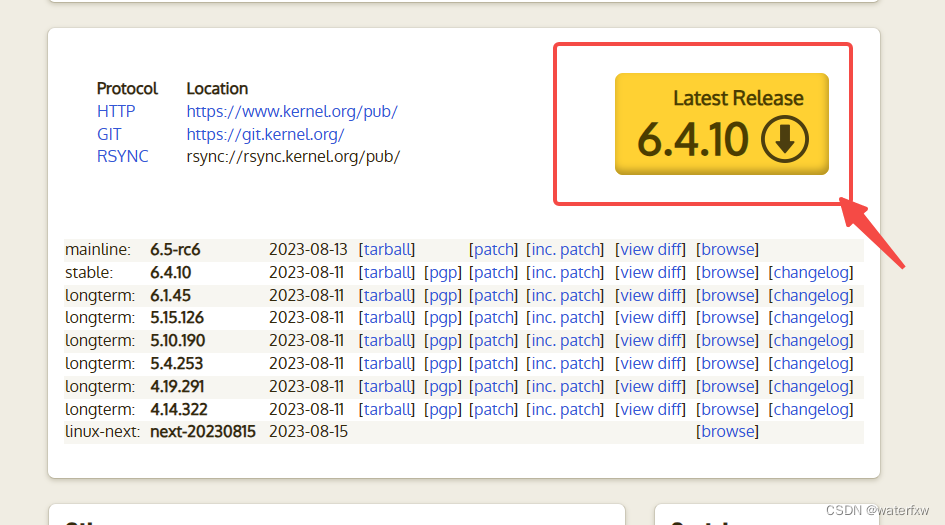
<kernel>kernel 6.4 USB-之-hub_port_connect()分析
<kernel>kernel 6.4 USB-之-hub_port_connect()分析 kernel 6.4 USB系列文章如下: <kernel>kernel 6.4 USB-之-hub_event()分析 <kernel>kernel 6.4 USB-之-port_event()分析 <kern…...
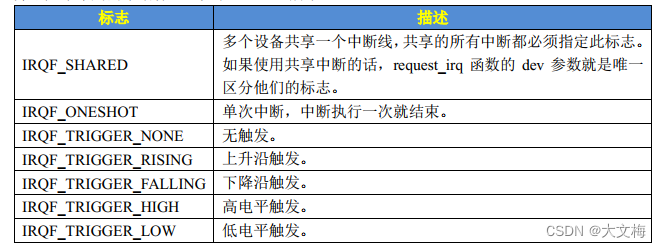
linux驱动学习3-外部中断
在做中断试验时,发现中断驱动总是insmod失败,之后定位到 gpio_request 失败,之后是想到使用的野火做好的系统,在uEnv.txt中会加载大量设备树插件,将key相关的设备树插件屏蔽即可。 linux中断API函数 中断号 每个中断…...

vue中的canvas插件
vue中canvas插件有vue-konva、vue-fabricjs、vue-canvas-effect、vue-chartjs和vue-threejs等。详细介绍:1、vue-konva是一个用于在Vue.js中使用Konva.js的插件,Konva.js是一个功能强大的HTML5 2D 渲染引擎,可以用于创建交互式的Canvas应用程…...
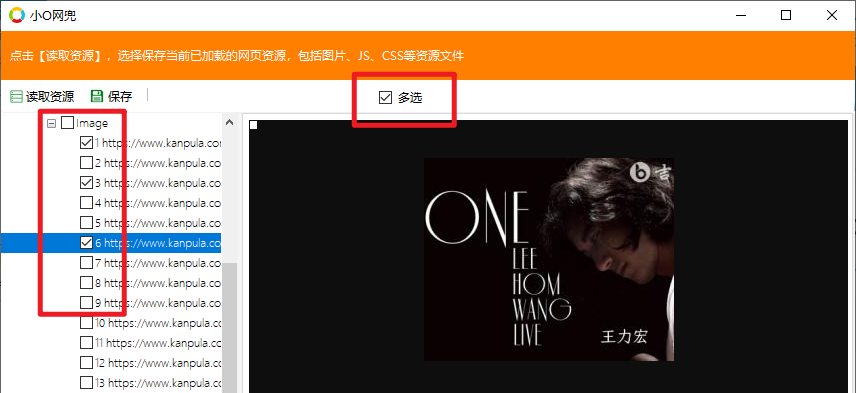
分享图片 | 快速浏览网页资源,批量保存、一键分享图片
前言 小伙伴学习吉他,有时需要在互联网搜索曲谱资源,而多数曲谱均为图片,并且为多页,在电脑上显示练习很不方便,需要停下来点击鼠标进行翻页,影响练习的连贯性。 为了解决上述问题,通常把图片…...

Programming abstractions in C阅读笔记:p123-p126
《Programming Abstractions In C》学习第50天,p123-p126,总结如下: 一、技术总结 1.notaion 这也是一个在计算机相关书籍中出现的词,但有时却不是那么好理解,因为它可以指代很多对象,这里做一个记录。示…...
-[通用功能:LLMChain、RouterChain和SequentialChain])
自然语言处理从入门到应用——LangChain:链(Chains)-[通用功能:LLMChain、RouterChain和SequentialChain]
分类目录:《自然语言处理从入门到应用》总目录 LLMChain LLMChain是查询LLM对象最流行的方式之一。它使用提供的输入键值(如果有的话,还包括内存键值)格式化提示模板,将格式化的字符串传递给LLM,并返回LLM…...
ElasticSearch-安装部署全过程
本文已收录于专栏 《中间件合集》 目录 概念说明什么是ElasticSearch什么是Kibana什么是RESTful API 提供服务安装过程安装ElasticSearch1.下载ElasticSearch 安装包2.解压安装包3.进入解压之后的文件夹4.创建一个data文件夹用来存储数据5.进入config文件夹编辑elasticsearch.y…...

mathematica报错:Tag Plus is \ Protected
在使用化简函数Simplify的时候使用了规则的语法,但是规则可能没有使用等号。 例如 Simplify[(1 - c^2)/d^2, c^2 d^2 1]等号被认为是赋值符号,要修改为两个等号: Simplify[(1 - c^2)/d^2, c^2 d^2 1]这样就不会报错了。...
Python Django 模型概述与应用
今天来为大家介绍 Django 框架的模型部分,模型是真实数据的简单明确的描述,它包含了储存的数据所必要的字段和行为,Django 遵循 DRY Principle 。它的目标是你只需要定义数据模型,然后其它的杂七杂八代码你都不用关心,…...
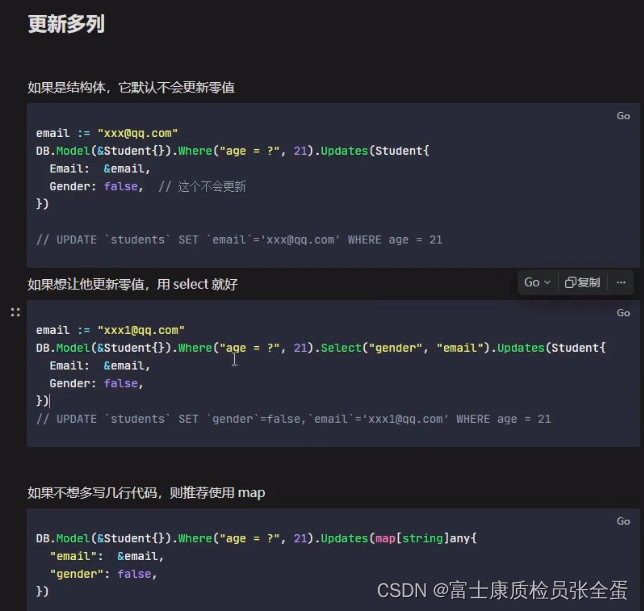
Golang Gorm 更新字段 save update updates
更新和删除操作的前提条件都是要在找到数据的情况下,先要查询到数据才可以做操作。 更新的前提的先查询到记录,Save保存所有字段,用于单个记录的全字段更新它会保控所有字段,即使零值也会保存。 在更新和删除之前,要利…...

springBoot 配置文件引入 redis 的相关参数说明
在Spring Boot应用中使用Redis作为缓存或数据存储时,可以在应用的配置文件中配置相关参数。下面是常用的Redis配置参数及其说明: spring.redis.host: Redis服务器主机地址,默认为localhost。spring.redis.port: Redis服务器端口,…...

终极大脑训练指南:5个简单步骤用BrainWorkshop提升你的认知能力
终极大脑训练指南:5个简单步骤用BrainWorkshop提升你的认知能力 【免费下载链接】brainworkshop Continued development of the popular brainworkshop game 项目地址: https://gitcode.com/gh_mirrors/br/brainworkshop BrainWorkshop是一款专业的免费开源大…...

使用curl命令直接调试Taotoken大模型聊天接口的详细步骤
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用curl命令直接调试Taotoken大模型聊天接口的详细步骤 对于需要在底层进行调试、验证或是在无特定SDK环境中工作的开发者而言&am…...

AI驱动游戏开发:Godogen自动化流水线全解析
1. 项目概述:当AI成为你的游戏开发合伙人 如果你是一名独立游戏开发者,或者对用Godot引擎做点小玩意儿感兴趣,那你肯定体会过那种感觉:一个绝妙的点子在你脑海里盘旋,但一想到要从零开始搭场景、写脚本、画素材&#x…...

ctf show web入门48
这是一道典型的 PHP 代码审计与命令注入(Command Injection) 绕过题。代码逻辑分析 代码的核心逻辑如下: 输入点:通过 GET 方式接收参数 c。 过滤机制:使用 preg_match 进行正则匹配,过滤了大量关键字符和命…...

终极SQLC资源管理指南:轻松优化内存、CPU和磁盘使用的7个实用策略
终极SQLC资源管理指南:轻松优化内存、CPU和磁盘使用的7个实用策略 【免费下载链接】sqlc Generate type-safe code from SQL 项目地址: https://gitcode.com/gh_mirrors/sq/sqlc sqlc是一个强大的工具,能够从SQL生成类型安全的代码,帮…...

小白程序员必看:收藏这份AI黑话指南,轻松入门大模型世界!
本文用大白话解释了AI领域几个核心概念:AI是总称,LLM是推理模型,Agent能独立执行任务,MCP是标准化接口,Skills是技能包。文章通过生活化比喻和实例,帮助读者理解这些概念如何协同工作,实现高效自…...
5分钟搞懂钢琴音区划分)
别再死记硬背了!用MIDI键盘和DAW软件(如FL Studio/Cubase)5分钟搞懂钢琴音区划分
别再死记硬背了!用MIDI键盘和DAW软件5分钟搞懂钢琴音区划分 第一次打开DAW的钢琴卷帘窗时,那些密密麻麻的C3、C4编号是否让你一头雾水?作为从乐队吉他手转型音乐制作的过来人,我完全理解这种困惑。传统教材里"小字组"&q…...

跨越版本鸿沟:Matlab 2020b与VS2022混合编译环境搭建实战
1. 环境准备:当Matlab 2020b遇上VS2022 第一次尝试在Matlab 2020b里调用VS2022编译器时,命令行弹出的红色报错让我愣了半天。官方文档明确写着Matlab 2020b最高只支持VS2019,这就像让Windows XP运行最新版Photoshop——理论上不可能ÿ…...

告别爬虫:使用trendsmcp API稳定获取多平台趋势数据
1. 项目概述:告别爬虫,拥抱稳定的趋势数据API如果你曾经尝试过用Python抓取Google Trends、新闻提及量或者社交媒体趋势数据,那你一定对“429 Too Many Requests”这个错误代码深恶痛绝。半夜两点,数据管道突然中断,你…...

深入解析WeChatFerry:基于RPC与进程注入的微信自动化框架
1. 项目概述:一个为微信自动化而生的强力引擎如果你正在寻找一个能够稳定、高效地控制微信客户端进行自动化操作的解决方案,那么lich0821/WeChatFerry这个项目绝对值得你花时间深入研究。它不是一个简单的消息发送工具,而是一个基于 RPC&…...