【3D激光SLAM】LOAM源代码解析--transformMaintenance.cpp
系列文章目录
·【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp
·【3D激光SLAM】LOAM源代码解析–laserOdometry.cpp
·【3D激光SLAM】LOAM源代码解析–laserMapping.cpp
·【3D激光SLAM】LOAM源代码解析–transformMaintenance.cpp
写在前面
本系列文章将对LOAM源代码进行讲解,在讲解过程中,涉及到论文中提到的部分,会结合论文以及我自己的理解进行解读,尤其是对于其中坐标变换的部分,将会进行详细的讲解。
本来是懒得写的,一个是怕自己以后忘了,另外是我在学习过程中,其实没有感觉哪一个博主能讲解的通篇都能让我很明白,特别是坐标变换部分的代码,所以想着自己学完之后,按照自己的理解,也写一个LOAM解读,希望能对后续学习LOAM的同学们有所帮助。
之后也打算录一个LOAM讲解的视频,大家可以关注一下。
文章目录
- 系列文章目录
- 写在前面
- 整体框架
- 一、变量含义
- 二、main()函数
- 三、接收laserMapping的转换信息
- 四、接收laserOdometry的信息
- 五、位姿融合
- 总结
整体框架
LOAM多牛逼就不用多说了,直接开始
先贴一下我详细注释的LOAM代码,在这个版本的代码上加入了我自己的理解。
我觉得最重要也是最恶心的一部分是其中的坐标变换,在代码里面真的看着头大,所以先明确一下坐标系(都是右手坐标系):
- IMU(IMU坐标系imu):x轴向前,y轴向左,z轴向上
- LIDAR(激光雷达坐标系l):x轴向前,y轴向左,z轴向上
- CAMERA(相机坐标系,也可以理解为里程计坐标系c):z轴向前,x轴向左,y轴向上
- WORLD(世界坐标系w,也叫全局坐标系,与里程计第一帧init重合):z轴向前,x轴向左,y轴向上
- MAP(地图坐标系map,一定程度上可以理解为里程计第一帧init):z轴向前,x轴向左,y轴向上
坐标变换约定: 为了清晰,变换矩阵的形式与《SLAM十四讲中一样》,即: R A _ B R_{A\_B} RA_B表示B坐标系相对于A坐标系的变换,B中一个向量通过 R A _ B R_{A\_B} RA_B可以变换到A中的向量。
首先对照ros的节点图和论文中提到的算法框架来看一下:


可以看到节点图和论文中的框架是一一对应的,这几个模块的功能如下:
- scanRegistration:对原始点云进行预处理,计算曲率,提取特征点
- laserOdometry:对当前sweep与上一次sweep进行特征匹配,计算一个快速(10Hz)但粗略的位姿估计
- laserMapping:对当前sweep与一个局部子图进行特征匹配,计算一个慢速(1Hz)比较精确的位姿估计
- transformMaintenance:对两个模块计算出的位姿进行融合,得到最终的精确地位姿估计
本文介绍transformMaintenance模块,它就是将laserOdometry和laserMapping两个模块优化得到的当前帧相对于初始帧的坐标变换进行融合,从而得到最终的最优的坐标变换结果。
一、变量含义
首先,介绍一下本程序用到变量的含义,与laserMapping一致:
- transformBefMapped[6]:从laserMapping模块接收到的,优化前的当前帧相对于初始时刻的位姿变换 T i n i t _ e n d T_{init\_end} Tinit_end
- transformSum[6]:从laserOdometry模块接收到的,当前帧相对于初始时刻的变换 T i n i t _ s t a r t T_{init\_start} Tinit_start
- transformAftMapped[6]:经过laserMapping模块优化后的,当前帧相对于初始时刻的位姿变换 T m a p _ e n d T_{map\_end} Tmap_end
- transformMapped[6]:融合后的当前帧相对于初始帧的坐标变换
一些理解:虽然transformAftMapped[6]我上面写的是 T m a p _ e n d T_{map\_end} Tmap_end,看起来好像是把坐标系换成了map坐标系,但是我觉得这里有两种理解都可以:
- AftMapped可以理解为经过laserMapping模块优化后的里程计坐标系下的当前帧end相对于初始帧的坐标变换
- 也可以理解为经过laserMapping模块优化,变到了map坐标系
二、main()函数
main函数依然很简单,就是定义了一些订阅者和发布者,接收/laser_odom_to_init和/aft_mapped_to_init两个坐标变换话题,然后进入相应的回调函数进行融合;然后发布融合后的当前帧相当于初始帧的坐标变换,以及坐标变换。
int main(int argc, char** argv)
{ros::init(argc, argv, "transformMaintenance");ros::NodeHandle nh;ros::Subscriber subLaserOdometry = nh.subscribe<nav_msgs::Odometry> ("/laser_odom_to_init", 5, laserOdometryHandler);ros::Subscriber subOdomAftMapped = nh.subscribe<nav_msgs::Odometry> ("/aft_mapped_to_init", 5, odomAftMappedHandler);ros::Publisher pubLaserOdometry2 = nh.advertise<nav_msgs::Odometry> ("/integrated_to_init", 5);pubLaserOdometry2Pointer = &pubLaserOdometry2;laserOdometry2.header.frame_id = "/camera_init";laserOdometry2.child_frame_id = "/camera";tf::TransformBroadcaster tfBroadcaster2;tfBroadcaster2Pointer = &tfBroadcaster2;laserOdometryTrans2.frame_id_ = "/camera_init";laserOdometryTrans2.child_frame_id_ = "/camera";ros::spin();return 0;
}
三、接收laserMapping的转换信息
接收/aft_mapped_to_init话题的回调函数很简单,就是将接收到的数据,赋值给transformAftMapped[6]和transformBefMapped[6]变量,这两个变量的含义与laserMapping中一致,就不过多解释了。
//接收laserMapping的转换信息
void odomAftMappedHandler(const nav_msgs::Odometry::ConstPtr& odomAftMapped)
{double roll, pitch, yaw;geometry_msgs::Quaternion geoQuat = odomAftMapped->pose.pose.orientation;tf::Matrix3x3(tf::Quaternion(geoQuat.z, -geoQuat.x, -geoQuat.y, geoQuat.w)).getRPY(roll, pitch, yaw);transformAftMapped[0] = -pitch;transformAftMapped[1] = -yaw;transformAftMapped[2] = roll;transformAftMapped[3] = odomAftMapped->pose.pose.position.x;transformAftMapped[4] = odomAftMapped->pose.pose.position.y;transformAftMapped[5] = odomAftMapped->pose.pose.position.z;transformBefMapped[0] = odomAftMapped->twist.twist.angular.x;transformBefMapped[1] = odomAftMapped->twist.twist.angular.y;transformBefMapped[2] = odomAftMapped->twist.twist.angular.z;transformBefMapped[3] = odomAftMapped->twist.twist.linear.x;transformBefMapped[4] = odomAftMapped->twist.twist.linear.y;transformBefMapped[5] = odomAftMapped->twist.twist.linear.z;
}
四、接收laserOdometry的信息
这个回调函数主要是接收到/laser_odom_to_init话题后进行,先根据接收到的数据对相关变量进行赋值操作,然后进入到transformAssociateToMap()函数进行位姿变换融合,最后将融合后的位姿变换发布出去,发布的话题为:
- /integrated_to_init:融合后的当前帧相对于初始帧(世界坐标系)的位姿变换
另外,广播了/camera相对于/camera_init的坐标变换
//接收laserOdometry的信息
void laserOdometryHandler(const nav_msgs::Odometry::ConstPtr& laserOdometry)
{double roll, pitch, yaw;geometry_msgs::Quaternion geoQuat = laserOdometry->pose.pose.orientation;tf::Matrix3x3(tf::Quaternion(geoQuat.z, -geoQuat.x, -geoQuat.y, geoQuat.w)).getRPY(roll, pitch, yaw);//得到旋转平移矩阵transformSum[0] = -pitch;transformSum[1] = -yaw;transformSum[2] = roll;transformSum[3] = laserOdometry->pose.pose.position.x;transformSum[4] = laserOdometry->pose.pose.position.y;transformSum[5] = laserOdometry->pose.pose.position.z;transformAssociateToMap();geoQuat = tf::createQuaternionMsgFromRollPitchYaw(transformMapped[2], -transformMapped[0], -transformMapped[1]);laserOdometry2.header.stamp = laserOdometry->header.stamp;laserOdometry2.pose.pose.orientation.x = -geoQuat.y;laserOdometry2.pose.pose.orientation.y = -geoQuat.z;laserOdometry2.pose.pose.orientation.z = geoQuat.x;laserOdometry2.pose.pose.orientation.w = geoQuat.w;laserOdometry2.pose.pose.position.x = transformMapped[3];laserOdometry2.pose.pose.position.y = transformMapped[4];laserOdometry2.pose.pose.position.z = transformMapped[5];pubLaserOdometry2Pointer->publish(laserOdometry2);//发送旋转平移量laserOdometryTrans2.stamp_ = laserOdometry->header.stamp;laserOdometryTrans2.setRotation(tf::Quaternion(-geoQuat.y, -geoQuat.z, geoQuat.x, geoQuat.w));laserOdometryTrans2.setOrigin(tf::Vector3(transformMapped[3], transformMapped[4], transformMapped[5]));tfBroadcaster2Pointer->sendTransform(laserOdometryTrans2);
}
五、位姿融合
这里的位姿融合部分与laserMapping中的求解地图坐标系中end时刻到初始时刻的初始猜测–transformAssociateToMap()函数完全一致。
1.求解位移增量
"transformBefMapped - transformSum"的含义是上一帧相对于初始帧的位移量 与 当前帧相对于初始帧的位移量 的差值,得到的结果是初始帧init坐标系下的位移增量 t i n i t s t a r t − e n d t_{init}^{start-end} tinitstart−end。
然后将其变换到end时刻:
t i n i t s t a r t − e n d = R e n d _ i n i t ∗ t i n i t s t a r t − e n d = R i n i t _ e n d − 1 ∗ t i n i t s t a r t − e n d R i n i t _ e n d − 1 = R Z X Y − 1 = R − r z R − r x R − r y t_{init}^{start-end} = R_{end\_init} * t_{init}^{start-end} = R_{init\_end}^{-1} * t_{init}^{start-end} \\ R_{init\_end}^{-1} = R_{ZXY}^{-1} = R_{-rz} R_{-rx} R_{-ry} tinitstart−end=Rend_init∗tinitstart−end=Rinit_end−1∗tinitstart−endRinit_end−1=RZXY−1=R−rzR−rxR−ry
对应于下面代码中所示的变换。
2.求解旋转部分的融合
现在这里的变量含义分别表示为:
- transformSum:laserOdometry模块的当前帧相对于初始帧的变换 R i n i t _ e n d L R_{init\_end}^L Rinit_endL
- transformBefMapped:laserMapping模块的当前帧相对于初始帧的变换 R i n i t _ e n d M R_{init\_end}^M Rinit_endM
- transformAftMapped:laserMapping模块的优化后的当前帧相对于初始帧的变换,也可以理解为当前帧相对于地图坐标系的变换 R m a p _ s t a r t M R_{map\_start}^M Rmap_startM
- transformMapped:融合后的当前帧相对于初始帧的坐标变换 R m a p _ e n d F R_{map\_end}^F Rmap_endF
那么有如下坐标变换关系:
R m a p _ e n d F = R m a p _ e n d M ∗ R i n i t _ e n d M − 1 ∗ R i n i t _ e n d L = R Z X Y ∗ R Z X Y − 1 ∗ R Z X Y R_{map\_end}^F = R_{map\_end}^M * R_{init\_end}^{M -1} * R_{init\_end}^L = R_{ZXY} * R_{ZXY}^{-1} * R_{ZXY} Rmap_endF=Rmap_endM∗Rinit_endM−1∗Rinit_endL=RZXY∗RZXY−1∗RZXY
这里的计算公式与laserOdometry模块中的IMU修正部分完全一样:
R m a p _ e n d F = [ c a c y c a c z + s a c x s a c y s a c z c a c y s a c z + s a c x s a c y c a c z c a c x s a c y c a c x s a c z c a c x c a c z − s a c x − s a c y c a c z + s a c x c a c y s a c z s a c y s a c z + s a c x c a c y c a c z c a c x c a c y ] R_{map\_end}^F=\left[ \begin{matrix} cacycacz+sacxsacysacz& cacysacz+sacxsacycacz& cacxsacy\\ cacxsacz& cacxcacz& -sacx\\ -sacycacz+sacxcacysacz& sacysacz+sacxcacycacz& cacxcacy\\ \end{matrix} \right] Rmap_endF= cacycacz+sacxsacysaczcacxsacz−sacycacz+sacxcacysaczcacysacz+sacxsacycaczcacxcaczsacysacz+sacxcacycaczcacxsacy−sacxcacxcacy
R m a p _ e n d M = [ c b c y c b c z + s b c x s b c y s b c z c b c y s b c z + s b c x s b c y c b c z c b c x s b c y c b c x s b c z c b c x c b c z − s b c x − s b c y c b c z + s b c x c b c y s b c z s b c y s b c z + s b c x c b c y c b c z c b c x c b c y ] R_{map\_end}^M=\left[ \begin{matrix} cbcycbcz+sbcxsbcysbcz& cbcysbcz+sbcxsbcycbcz& cbcxsbcy\\ cbcxsbcz& cbcxcbcz& -sbcx\\ -sbcycbcz+sbcxcbcysbcz& sbcysbcz+sbcxcbcycbcz& cbcxcbcy\\ \end{matrix} \right] Rmap_endM= cbcycbcz+sbcxsbcysbczcbcxsbcz−sbcycbcz+sbcxcbcysbczcbcysbcz+sbcxsbcycbczcbcxcbczsbcysbcz+sbcxcbcycbczcbcxsbcy−sbcxcbcxcbcy
R i n i t _ e n d M − 1 = [ c b l y c b l z − s b l x s b l y s b l z − c b l x s b l z s b l y c b l z + s b l x c b l y s b l z − c b l y s b l z + s b l x s b l y c b l z c b l x c b l z s b l y s b l z − s b l x c b l y c b l z − c b l x s b l y s b l x c b l x c b l y ] R_{init\_end}^{M -1}=\left[ \begin{matrix} cblycblz-sblxsblysblz& -cblxsblz& sblycblz+sblxcblysblz\\ -cblysblz+sblxsblycblz& cblxcblz& sblysblz-sblxcblycblz\\ -cblxsbly& sblx& cblxcbly\\ \end{matrix} \right] Rinit_endM−1= cblycblz−sblxsblysblz−cblysblz+sblxsblycblz−cblxsbly−cblxsblzcblxcblzsblxsblycblz+sblxcblysblzsblysblz−sblxcblycblzcblxcbly
R i n i t _ e n d L = [ c a l y c a l z + s a l x s a l y s a l z c a l y s a l z + s a l x s a l y c a l z c a l x s a l y c a l x s a l z c a l x c a l z − s a l x − s a l y c a l z + s a l x c a l y s a l z s a l y s a l z + s a l x c a l y c a l z c a l x c a l y ] R_{init\_end}^L=\left[ \begin{matrix} calycalz+salxsalysalz& calysalz+salxsalycalz& calxsaly\\ calxsalz& calxcalz& -salx\\ -salycalz+salxcalysalz& salysalz+salxcalycalz& calxcaly\\ \end{matrix} \right] Rinit_endL= calycalz+salxsalysalzcalxsalz−salycalz+salxcalysalzcalysalz+salxsalycalzcalxcalzsalysalz+salxcalycalzcalxsaly−salxcalxcaly
然后使用对应位置的值相等,就得到了修正后的累计变换acx、acy、acz,计算如下:
a c x = − a r c s i n ( R 2 , 3 ) = − a r c s i n ( − s b c x ∗ ( s a l x ∗ s b l x + c a l x ∗ c a l y ∗ c b l x ∗ c b l y + c a l x ∗ c b l x ∗ s a l y ∗ s b l y ) − c b c x ∗ c b c z ∗ ( c a l x ∗ s a l y ∗ ( c b l y ∗ s b l z − c b l z ∗ s b l x ∗ s b l y ) − c a l x ∗ c a l y ∗ ( s b l y ∗ s b l z + c b l y ∗ c b l z ∗ s b l x ) + c b l x ∗ c b l z ∗ s a l x ) − c b c x ∗ s b c z ∗ ( c a l x ∗ c a l y ∗ ( c b l z ∗ s b l y − c b l y ∗ s b l x ∗ s b l z ) − c a l x ∗ s a l y ∗ ( c b l y ∗ c b l z + s b l x ∗ s b l y ∗ s b l z ) + c b l x ∗ s a l x ∗ s b l z ) ) a c y = a r c t a n ( R 1 , 3 / R 3 , 3 ) a c z = a r c t a n ( R 2 , 1 / R 2 , 2 ) acx = -arcsin(R_{2,3}) = -arcsin(-sbcx*(salx*sblx + calx*caly*cblx*cbly + calx*cblx*saly*sbly) - cbcx*cbcz*(calx*saly*(cbly*sblz - cblz*sblx*sbly) - calx*caly*(sbly*sblz + cbly*cblz*sblx) + cblx*cblz*salx) - cbcx*sbcz*(calx*caly*(cblz*sbly - cbly*sblx*sblz) - calx*saly*(cbly*cblz + sblx*sbly*sblz) + cblx*salx*sblz) ) \\ acy = arctan(R_{1,3}/R_{3,3}) \\ acz = arctan(R_{2,1}/R_{2,2}) acx=−arcsin(R2,3)=−arcsin(−sbcx∗(salx∗sblx+calx∗caly∗cblx∗cbly+calx∗cblx∗saly∗sbly)−cbcx∗cbcz∗(calx∗saly∗(cbly∗sblz−cblz∗sblx∗sbly)−calx∗caly∗(sbly∗sblz+cbly∗cblz∗sblx)+cblx∗cblz∗salx)−cbcx∗sbcz∗(calx∗caly∗(cblz∗sbly−cbly∗sblx∗sblz)−calx∗saly∗(cbly∗cblz+sblx∗sbly∗sblz)+cblx∗salx∗sblz))acy=arctan(R1,3/R3,3)acz=arctan(R2,1/R2,2)
3.将位移增量转换到map坐标系
t m a p i n c r e m e n t = R m a p _ e n d F ∗ t e n d i n c r e m e n t R m a p _ e n d F = R Z X Y = R y R x R z t_{map}^{increment} = R_{map\_end}^F * t_{end}^{increment} \\ R_{map\_end}^F = R_{ZXY} = R_y R_x R_z tmapincrement=Rmap_endF∗tendincrementRmap_endF=RZXY=RyRxRz
4.求解平移部分的初始猜测
这里注意一点:上面求出来的增量使用的事start时刻的累积位移减去end时刻的累计位移,所以这里在求解时也是减号,如下:
t m a p _ e n d F = t m a p _ e n d M + t m a p e n d − s t a r t = t m a p _ s t a r t M − t m a p s t a r t − e n d t_{map\_end}^F = t_{map\_end}^M + t_{map}^{end-start} = t_{map\_start}^M - t_{map}^{start-end} tmap_endF=tmap_endM+tmapend−start=tmap_startM−tmapstart−end
我在上面声明变量时提到了:地图坐标系map,一定程度上可以理解为里程计第一帧init,这个意思就是可以理解为map坐标系和初始时刻坐标系init以及世界坐标系w是重合的,而laserMapping中虽然写的是变换到了map坐标系,也可以理解为仍然是当前帧end相对于初始帧init的坐标变换,只是经过了laserMapping模块优化,所以这里的 t m a p _ e n d F t_{map\_end}^F tmap_endF也可以写成 t i n i t _ e n d F t_{init\_end}^F tinit_endF,这个解释只是为了符合作者代码中坐标变换时发布的是/camera_init到/camera的变换,所以这里写 t m a p _ e n d F t_{map\_end}^F tmap_endF也没问题。
//odometry的运动估计和mapping矫正量融合之后得到的最终的位姿transformMapped
void transformAssociateToMap()
{//平移后绕y轴旋转(-transformSum[1])float x1 = cos(transformSum[1]) * (transformBefMapped[3] - transformSum[3]) - sin(transformSum[1]) * (transformBefMapped[5] - transformSum[5]);float y1 = transformBefMapped[4] - transformSum[4];float z1 = sin(transformSum[1]) * (transformBefMapped[3] - transformSum[3]) + cos(transformSum[1]) * (transformBefMapped[5] - transformSum[5]);//绕x轴旋转(-transformSum[0])float x2 = x1;float y2 = cos(transformSum[0]) * y1 + sin(transformSum[0]) * z1;float z2 = -sin(transformSum[0]) * y1 + cos(transformSum[0]) * z1;//绕z轴旋转(-transformSum[2])transformIncre[3] = cos(transformSum[2]) * x2 + sin(transformSum[2]) * y2;transformIncre[4] = -sin(transformSum[2]) * x2 + cos(transformSum[2]) * y2;transformIncre[5] = z2;float sbcx = sin(transformSum[0]);float cbcx = cos(transformSum[0]);float sbcy = sin(transformSum[1]);float cbcy = cos(transformSum[1]);float sbcz = sin(transformSum[2]);float cbcz = cos(transformSum[2]);float sblx = sin(transformBefMapped[0]);float cblx = cos(transformBefMapped[0]);float sbly = sin(transformBefMapped[1]);float cbly = cos(transformBefMapped[1]);float sblz = sin(transformBefMapped[2]);float cblz = cos(transformBefMapped[2]);float salx = sin(transformAftMapped[0]);float calx = cos(transformAftMapped[0]);float saly = sin(transformAftMapped[1]);float caly = cos(transformAftMapped[1]);float salz = sin(transformAftMapped[2]);float calz = cos(transformAftMapped[2]);float srx = -sbcx*(salx*sblx + calx*cblx*salz*sblz + calx*calz*cblx*cblz)- cbcx*sbcy*(calx*calz*(cbly*sblz - cblz*sblx*sbly)- calx*salz*(cbly*cblz + sblx*sbly*sblz) + cblx*salx*sbly)- cbcx*cbcy*(calx*salz*(cblz*sbly - cbly*sblx*sblz) - calx*calz*(sbly*sblz + cbly*cblz*sblx) + cblx*cbly*salx);transformMapped[0] = -asin(srx);float srycrx = sbcx*(cblx*cblz*(caly*salz - calz*salx*saly)- cblx*sblz*(caly*calz + salx*saly*salz) + calx*saly*sblx)- cbcx*cbcy*((caly*calz + salx*saly*salz)*(cblz*sbly - cbly*sblx*sblz)+ (caly*salz - calz*salx*saly)*(sbly*sblz + cbly*cblz*sblx) - calx*cblx*cbly*saly)+ cbcx*sbcy*((caly*calz + salx*saly*salz)*(cbly*cblz + sblx*sbly*sblz)+ (caly*salz - calz*salx*saly)*(cbly*sblz - cblz*sblx*sbly) + calx*cblx*saly*sbly);float crycrx = sbcx*(cblx*sblz*(calz*saly - caly*salx*salz)- cblx*cblz*(saly*salz + caly*calz*salx) + calx*caly*sblx)+ cbcx*cbcy*((saly*salz + caly*calz*salx)*(sbly*sblz + cbly*cblz*sblx)+ (calz*saly - caly*salx*salz)*(cblz*sbly - cbly*sblx*sblz) + calx*caly*cblx*cbly)- cbcx*sbcy*((saly*salz + caly*calz*salx)*(cbly*sblz - cblz*sblx*sbly)+ (calz*saly - caly*salx*salz)*(cbly*cblz + sblx*sbly*sblz) - calx*caly*cblx*sbly);transformMapped[1] = atan2(srycrx / cos(transformMapped[0]), crycrx / cos(transformMapped[0]));float srzcrx = (cbcz*sbcy - cbcy*sbcx*sbcz)*(calx*salz*(cblz*sbly - cbly*sblx*sblz)- calx*calz*(sbly*sblz + cbly*cblz*sblx) + cblx*cbly*salx)- (cbcy*cbcz + sbcx*sbcy*sbcz)*(calx*calz*(cbly*sblz - cblz*sblx*sbly)- calx*salz*(cbly*cblz + sblx*sbly*sblz) + cblx*salx*sbly)+ cbcx*sbcz*(salx*sblx + calx*cblx*salz*sblz + calx*calz*cblx*cblz);float crzcrx = (cbcy*sbcz - cbcz*sbcx*sbcy)*(calx*calz*(cbly*sblz - cblz*sblx*sbly)- calx*salz*(cbly*cblz + sblx*sbly*sblz) + cblx*salx*sbly)- (sbcy*sbcz + cbcy*cbcz*sbcx)*(calx*salz*(cblz*sbly - cbly*sblx*sblz)- calx*calz*(sbly*sblz + cbly*cblz*sblx) + cblx*cbly*salx)+ cbcx*cbcz*(salx*sblx + calx*cblx*salz*sblz + calx*calz*cblx*cblz);transformMapped[2] = atan2(srzcrx / cos(transformMapped[0]), crzcrx / cos(transformMapped[0]));x1 = cos(transformMapped[2]) * transformIncre[3] - sin(transformMapped[2]) * transformIncre[4];y1 = sin(transformMapped[2]) * transformIncre[3] + cos(transformMapped[2]) * transformIncre[4];z1 = transformIncre[5];x2 = x1;y2 = cos(transformMapped[0]) * y1 - sin(transformMapped[0]) * z1;z2 = sin(transformMapped[0]) * y1 + cos(transformMapped[0]) * z1;transformMapped[3] = transformAftMapped[3] - (cos(transformMapped[1]) * x2 + sin(transformMapped[1]) * z2);transformMapped[4] = transformAftMapped[4] - y2;transformMapped[5] = transformAftMapped[5] - (-sin(transformMapped[1]) * x2 + cos(transformMapped[1]) * z2);
}总结
到此为止,整个LOAM的讲解就结束了!!
我的感觉就是看LOAM的论文,有一种“作者说的好有道理,确实就是这样啊”的感觉,但是如果要是让自己想,就想不出来这么牛逼的算法,它的代码也写的比较漂亮。
代码的运行就不单独开一篇文章写了,只要装好了依赖,编译很顺畅,也没报什么错,我找了一个数据集测试了一下,也没问题,测试的数据里放在了文章开头提到的我的github仓库的bag文件夹中,运行结果点云图放在了pcl文件夹中,放一张结果截图。

相关文章:
【3D激光SLAM】LOAM源代码解析--transformMaintenance.cpp
系列文章目录 【3D激光SLAM】LOAM源代码解析–scanRegistration.cpp 【3D激光SLAM】LOAM源代码解析–laserOdometry.cpp 【3D激光SLAM】LOAM源代码解析–laserMapping.cpp 【3D激光SLAM】LOAM源代码解析–transformMaintenance.cpp 写在前面 本系列文章将对LOAM源代码进行讲解…...

DiscuzQ 二开教程(7)——二次开发版本部署文档
DiscuzQ 二开教程(7)——二次开发版本部署文档 源码:Discuz-Q-V3: 本仓库为Discuz-Q V3.0.211111 版本的二次开发版本,是将DiscuzQ官方仓库进行合并代码(All in One)整理后的仓库,使用更方便。…...
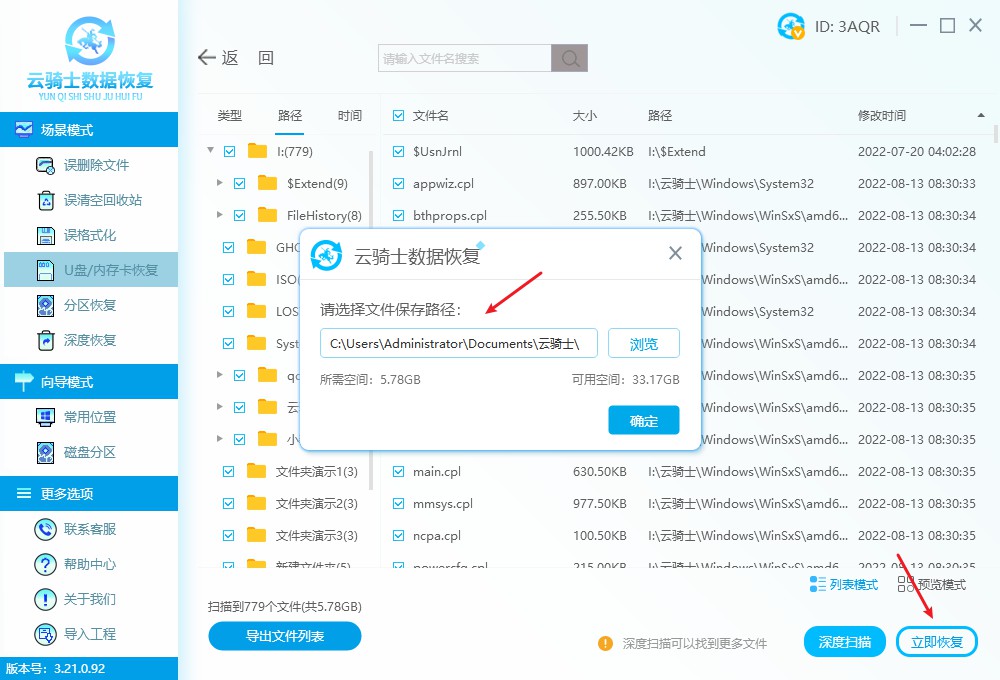
u盘数据丢失但占内存如何恢复?不要着急,这里有拯救方案
U盘数据丢失但占内存如何恢复?数据丢失是一种让人非常头疼的问题,尤其是当我们的U盘数据丢失了,但内存仍然被占用时,更令人困惑和焦虑。然而,不要慌张!在本文中,将为大家介绍一些有效的方法来恢…...

springboot日志文件名称为什么叫logback-spring.xml
如题,为什么springboot日志配置文件叫logback-spring.xml? 在整个项目中搜索 logback-spring.xml 并没有搜索到。 先看一下 org.springframework.boot.context.logging.LoggingApplicationListener#initialize protected void initialize(ConfigurableEn…...
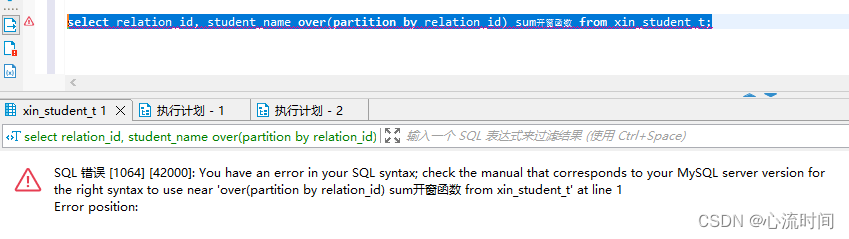
Mysql 开窗函数(窗口函数)
文章目录 全部数据示例1(说明)开窗函数可以比groupby多查出条件列外的字段,开窗函数主要是为了跟聚合函数一起使用,达到分组统计效果,并且开窗函数的结果集基本都是跟总行数一样示例2示例3示例4错误示例1错误示例2错误…...

计算机视觉之图像特征提取
图像特征提取是计算机视觉中的重要任务,它有助于识别、分类、检测和跟踪对象。以下是一些常用的图像特征提取算法及其简介: 颜色直方图(Color Histogram): 简介:颜色直方图表示图像中各种颜色的分布情况。通…...

【面试经典150题】移除元素·JavaScript版
题目来源 大致思路:遍历数组,如果遇到值为val的元素,使用数组最后一个元素替换它。详细过程: /*** param {number[]} nums* param {number} val* return {number}*/ var removeElement function(nums, val) {let i0,nnums.leng…...

Cesium 相机的三种放置方式
文章目录 Cesium 相机的三种放置方式第一种:setView 计算视角1. Cartesian3 方式2. Rectangle 方式 第二种:flyTo第三种:lookAt Cesium 相机的三种放置方式 Cesium 提供了三种方式对相机的位置进行摆放 第一种:setView 计算视角 …...

看了我这篇帖子,你还会觉得制作电子杂志很难吗?
如果你也像我一样笨手笨脚的不会设计排版制作杂志也没关系,用FLBOOK就能在线制作电子杂志,效果极好! 工具:FLBOOK 步骤如下: 1.打开FLBOOK在线制作电子杂志平台 2.点击开始创作,有四个创建作品的方式&…...
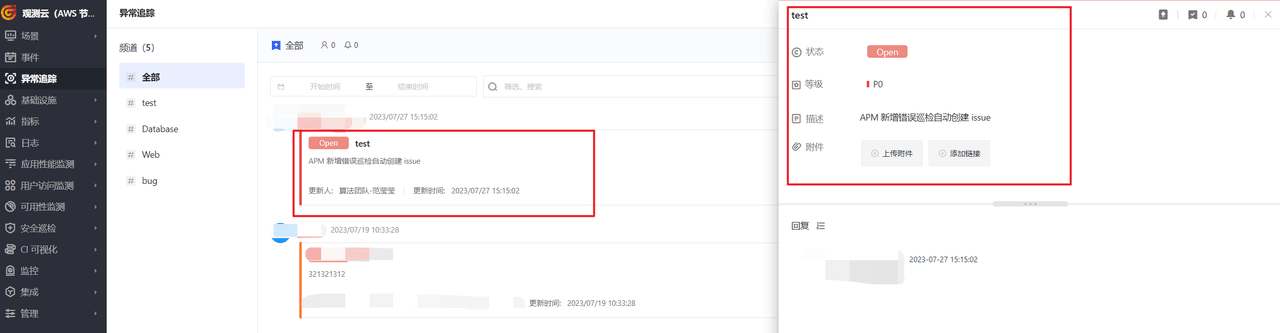
SRE 与开发的自动化协同 -- 生产环境出现 bug 自动生成异常追踪
简介 生产环境 bug 的定义:RUM 应用和 APM 应用的 error_stack 信息被捕捉后成为 bug。 以 APM 新增错误巡检为例,当出现新错误时,在观测云控制台的「事件」模块下生成新的事件报告,捕捉为 bug。同时利用 Dataflux Func 创建异常…...

【简单认识Docker基本管理】
文章目录 一、Docker概述1、定义2.容器化流行的原因3.Docker和虚拟机的区别4.Docker核心概念 二、安装docker三、镜像管理1.搜索镜像2.下载(拉取)镜像3.查看已下载镜像4.查看镜像详细信息5.修改镜像标签6.删除镜像7.导出镜像文件和拉取本地镜像文件8.上传…...
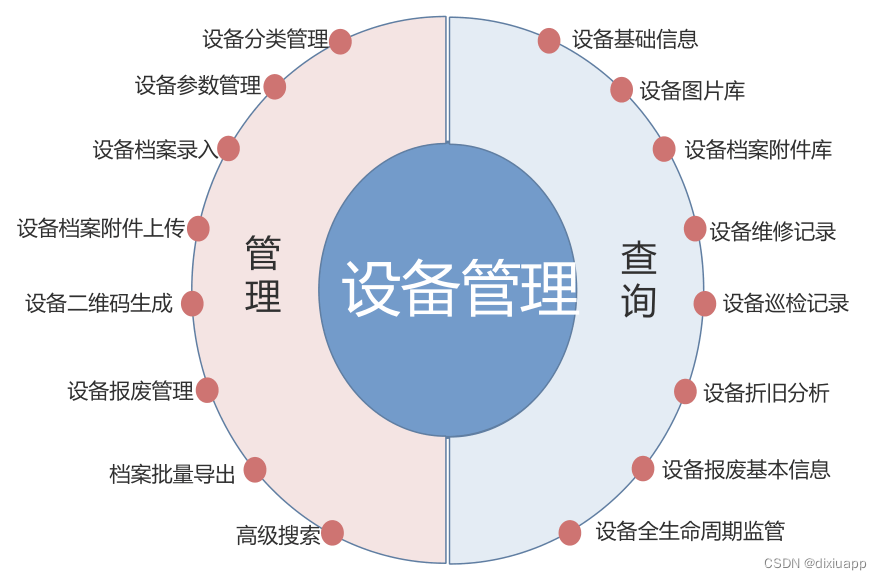
设备管理系统是什么?的修设备管理系统有什么功能?
随着计算机技术的迅速发展和移动互联网的商业化和社会化应用,设备的种类和数量急剧增加。如何利用先进的网络技术和快速更新的计算机设备来有效地收集和处理设备信息,建立以信息化为核心的管理体系,减轻管理和业务人员的数据处理负担…...
Docker安装并配置Pushgateway
Linux下安装Docker请参考:Linux安装Docker 简介 Pushgateway是Prometheus的一个组件,prometheus server默认是通过Exporter主动获取数据(默认采取pull拉取数据),Pushgateway则是通过exporter主动方式推送数据到Pushg…...
汽车OTA活动高质量发展的“常”与“新”
伴随着车主的频繁崔更,车企除了卷硬件、拼价格,逐渐将精力转移到汽车全生命周期的常用常新。时至下半年,车企OTA圈愈发热闹,以新势力、新实力为代表新一代车企,OTA运营活动逐渐进入高质量发展期。 所谓高质量…...
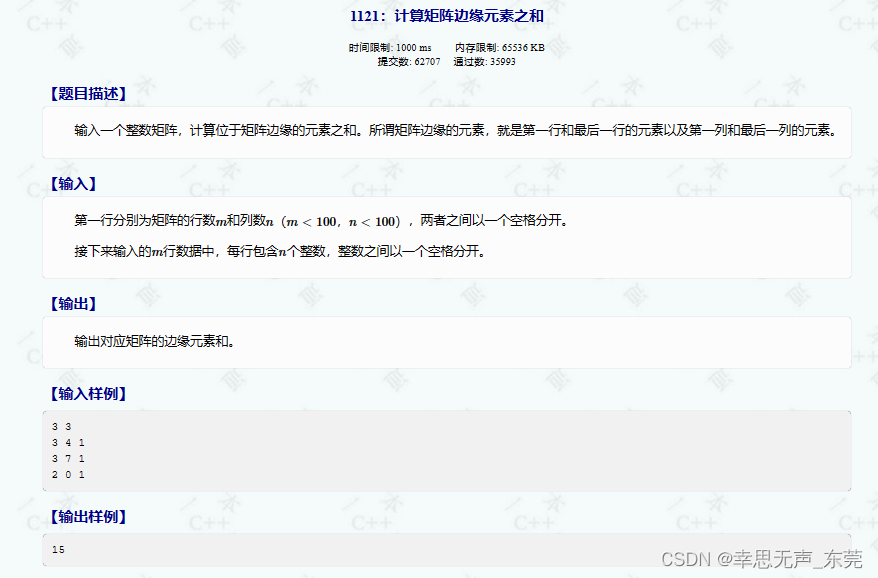
C++信息学奥赛1121:计算矩阵边缘元素之和
题解:i0 or j0 or in-1 or jm-1 or in-1 or jm-1 代码: #include<iostream> // 包含输入输出流库 #include<cmath> // 包含数学函数库 using namespace std; // 使用标准命名空间int main() {int n,m;cin>>n>>m; // 输入…...
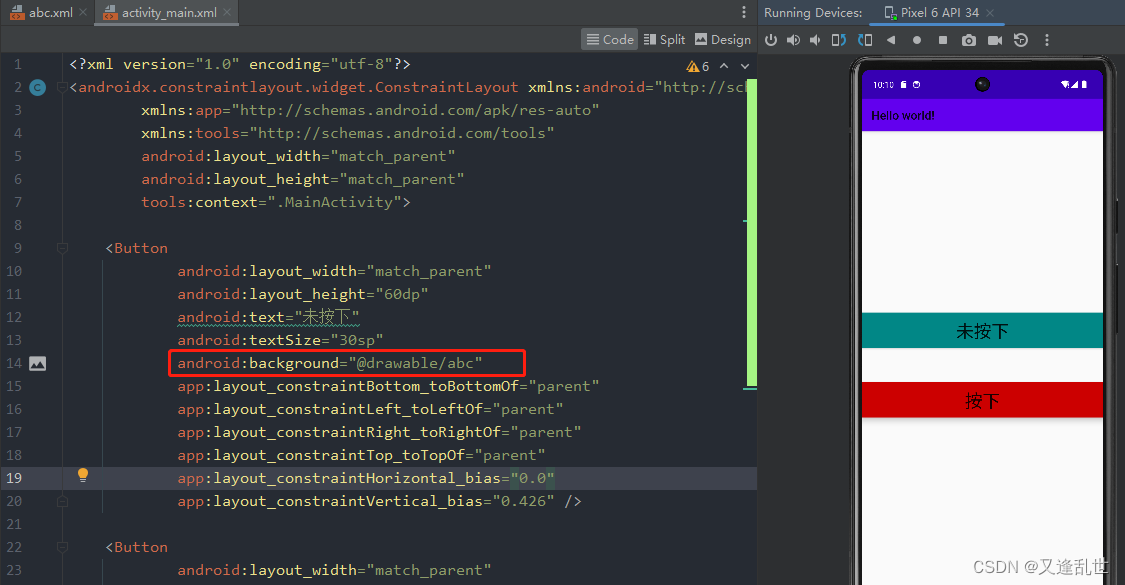
Android Selector 的使用
什么是 Selector? Selector 和 Shape 相似,是Drawable资源的一种,可以根据不同的状态,设置不同的图片效果,关键节点 < selector > ,例如:我们只需要将Button的 background 属性设置为该dr…...

k8s集群中service的域名解析、pod的域名解析
前言 在k8s集群中,service和pod都可以通过域名的形式进行相互通信,换句话说,在k8s集群内,通过service和pod的域名,可以直接访问内部应用,不必在通过service ip地址进行通信,一般的,…...

Shell 编程快速入门 之 数学计算和函数基础
目录 1. 求两数之和 整数之和 浮点数之和 2. 计算1-100的和 for...in C风格for循环 while...do until...do while和until的区别 关系运算符 break与continue的区别 3. shell函数基础知识 函数定义 函数名 函数体 参数 返回值 return返回值的含义 return与…...

学习php中如何获取pdf文件中的文本内容
学习php中如何获取pdf文件中的文本内容 要使用PHP获取PDF文件中的文本内容,可以使用PDF解析库。以下是一些流行的PDF解析库: pdftotext:它是一个命令行工具,可以将PDF文件转换为文本文件。可以使用PHP exec()函数运行该工具。 FP…...
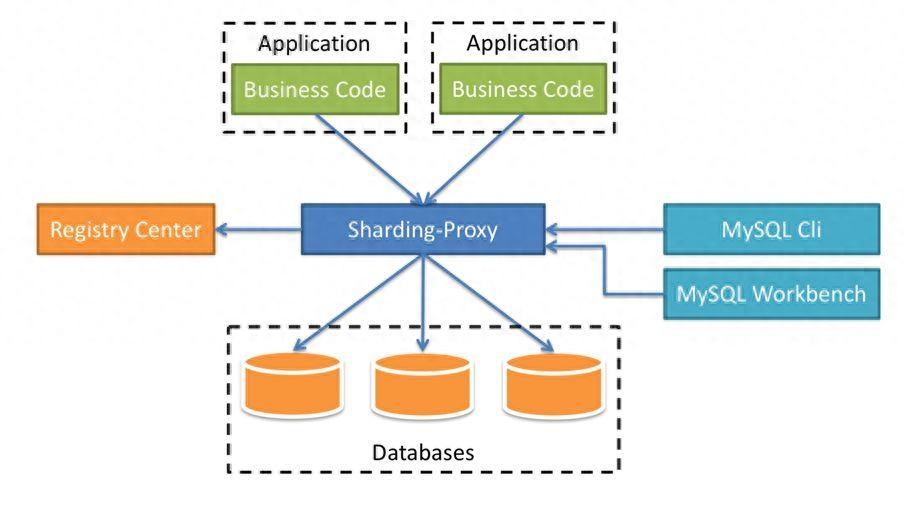
分布式数据库架构:高可用、高性能的数据存储
在现代信息时代,数据是企业发展的核心。为了支持海量数据的存储、高并发访问以及保证数据的可靠性,分布式数据库架构应运而生。分布式数据库架构是一种将数据存储在多个物理节点上,并通过一系列复杂的协调和管理机制来提供高可用性和高性能的…...

告别手动配网!用IEEE 1905.1协议实现Wi-Fi AP自动配置的保姆级流程拆解
告别手动配网!用IEEE 1905.1协议实现Wi-Fi AP自动配置的保姆级流程拆解 想象一下,当你需要为三层别墅部署全屋Wi-Fi覆盖,或是为小型办公室搭建多AP无线网络时,传统方式需要逐个登录每个AP的后台,重复输入SSID、密码、…...

某恶意软件样本逆向分析报告
1.概述样本来源:微步在线恶意软件名称:刘文博-关于北京体彩中心的问题反馈.exesha256:c28d23d8658abc1f5683c6b50239d5593eb7a274a3abec56124d7fb43fec1b642.行为分析该程序图标设为word文档图标,实际为exe文件,诱骗受…...

CANdela Studio配置避坑指南:从10服务到Data Type,这些细节别踩雷
CANdela Studio配置避坑指南:从10服务到Data Type,这些细节别踩雷 在汽车电子诊断功能开发中,CANdela Studio作为诊断数据库(CDD)的核心编辑工具,其配置精度直接影响着诊断协议栈的生成质量。许多工程师能够完成基础配置ÿ…...
)
R语言实战:用DescTools、ggiraphExtra、factoextra等包搞定多变量数据可视化(附完整代码)
R语言实战:多变量数据可视化的高效工具箱指南 在数据分析的日常工作中,我们常常需要处理包含数十甚至上百个变量的复杂数据集。传统的单变量或双变量可视化方法在这种场景下显得力不从心,而R语言生态系统中丰富的可视化包为我们提供了强大的工…...

2026年全国优质化妆培训机构深度盘点
颜值经济持续升温背景下,2026年化妆行业迎来规范化、专业化发展新阶段,涵盖影视、时尚、婚庆等多个领域,市场对专业化妆人才的需求持续攀升。据相关行业数据显示,2026年美业职业培训市场预计保持11%以上增速,美业门店专…...

Windows驱动存储管理终极指南:DriverStore Explorer技术深度解析
Windows驱动存储管理终极指南:DriverStore Explorer技术深度解析 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer DriverStore Explorer(简称RAPR)是一…...

自动化测试系统开关架构与继电器选型指南
1. 自动化测试系统中的开关架构选择在自动化测试系统中,开关架构的选择直接影响着测试效率、信号完整性和系统成本。根据测试需求和被测设备(DUT)特性,我们可以将开关架构分为四种基本类型。1.1 无开关架构无开关架构是最直接的连接方式,每个…...

社区团购系统源码推荐:为什么越来越多团队开始关注 LikeShop 社区团购系统?
如果你最近在研究:社区团购系统源码社区团购平台搭建团长分销系统私域社区团购社区自提系统你会发现一个现象:越来越多人开始提到:“LikeShop社区团购系统”。尤其是在:生鲜团购社区零售社群团购县域电商社区便利店私域卖货这些场…...

PHPStudy本地开发,用上Redis 5的Stream和HyperLogLog到底有多香?
PHPStudy本地开发中Redis 5的Stream与HyperLogLog实战指南 Redis作为高性能的内存数据库,在PHP开发中扮演着重要角色。当我们在本地开发环境使用PHPStudy时,默认安装的Redis 3.0.504版本功能有限,无法体验Redis 5引入的强大新特性。本文将深…...

如何通过 Pretty TypeScript Errors 提升开发效率:下载量激增背后的成功秘诀 [特殊字符]
如何通过 Pretty TypeScript Errors 提升开发效率:下载量激增背后的成功秘诀 🔥 【免费下载链接】pretty-ts-errors 🔵 Make TypeScript errors prettier and human-readable in VSCode 🎀 项目地址: https://gitcode.com/gh_mi…...