Layer Normalization(层规范化)
详细内容在这篇论文:Layer Normalization
训练深度神经网络需要大量的计算,减少计算时间的一个有效方法是规范化神经元的活动,例如批量规范化BN(batch normalization)技术,然而,批量规范化对小批量大小(batch size)敏感并且无法直接应用到RNN中(recurrent neural networks),为了解决上述问题,层规范化LN(Layer Normalization)被提出,不仅能直接应用到RNN,还能显著减少训练时间。与批量归一化不同,层规范化直接根据隐藏层内神经元的总输入估计归一化统计数据,因此不会在训练案例之间引入任何新的依赖关系。
背景
A feed-forward neural network is a non-linear mapping from a input pattern x \mathbf{x} x to an output vector y y y. Consider the l th l^{\text {th }} lth hidden layer in a deep feed-forward, neural network, and let a l a^l al be the vector representation of the summed inputs to the neurons in that layer. a i l a_i^l ail是第 l l l层第 i i i个神经元的线性加权输出。 The summed inputs are computed through a linear projection with the weight matrix W l W^l Wl and the bottom-up inputs h l h^l hl given as follows:
a i l = w i l ⊤ h l h i l + 1 = f ( a i l + b i l ) a_i^l=w_i^{l^{\top}} h^l \quad h_i^{l+1}=f\left(a_i^l+b_i^l\right) ail=wil⊤hlhil+1=f(ail+bil)
where f ( ⋅ ) f(\cdot) f(⋅) is an element-wise non-linear function(激活函数) and w i l w_i^l wil is the incoming weights to the i t h i^{t h} ith hidden units and b i l b_i^l bil is the scalar bias parameter. The parameters in the neural network are learnt using gradient-based optimization algorithms with the gradients being computed by back-propagation.
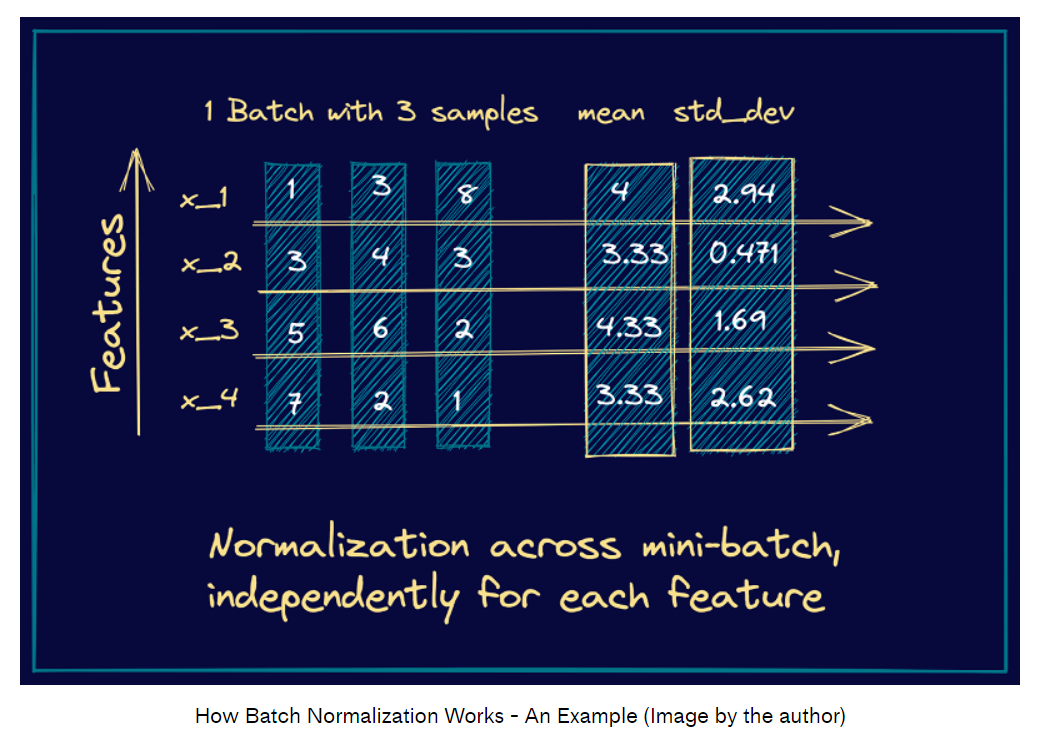
Batch Normalization
BN是为了减少协变量偏移提出的,它在训练阶段对隐神经元加权输出进行规范化,例如,对于 l t h l^{th} lth层的 i t h i^{th} ith个加权输出 a i l a_i^l ail,BN根据输入数据的分布进行了缩放
a ˉ i l = g i l σ i l ( a i l − μ i l ) μ i l = E x ∼ P ( x ) [ a i l ] σ i l = E x ∼ P ( x ) [ ( a i l − μ i l ) 2 ] \bar{a}_i^l=\frac{g_i^l}{\sigma_i^l}\left(a_i^l-\mu_i^l\right) \quad \mu_i^l=\underset{\mathbf{x} \sim P(\mathbf{x})}{\mathbb{E}}\left[a_i^l\right] \quad \sigma_i^l=\sqrt{\underset{\mathbf{x} \sim P(\mathbf{x})}{\mathbb{E}}\left[\left(a_i^l-\mu_i^l\right)^2\right]} aˉil=σilgil(ail−μil)μil=x∼P(x)E[ail]σil=x∼P(x)E[(ail−μil)2]
where a ˉ i l \bar{a}_i^l aˉil is normalized summed inputs to the i t h i^{t h} ith hidden unit in the l t h l^{t h} lth layer and g i g_i gi is a gain parameter scaling the normalized activation before the non-linear activation function.
实际中不会计算真正的 μ \mu μ和 σ \sigma σ,转而去估计一个batch里的 μ \mu μ和 σ \sigma σ,所以BN要求这个batchsize不能太小。然而,在一些在线学习任务以及超大分布模型中往往需要很小的batchsize。
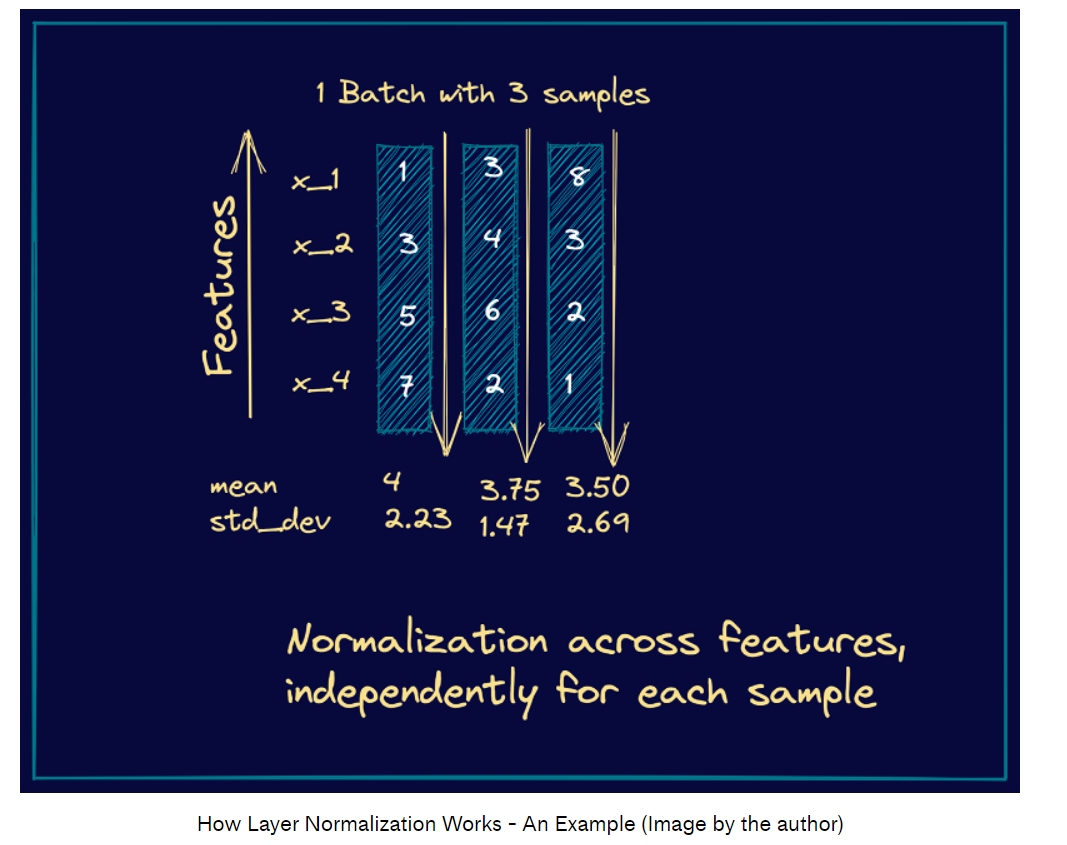
Layer Normalization
μ l = 1 H ∑ i = 1 H a i l σ l = 1 H ∑ i = 1 H ( a i l − μ l ) 2 \mu^l=\frac{1}{H} \sum_{i=1}^H a_i^l \quad \sigma^l=\sqrt{\frac{1}{H} \sum_{i=1}^H\left(a_i^l-\mu^l\right)^2} μl=H1i=1∑Hailσl=H1i=1∑H(ail−μl)2
H H H是一个隐藏层中的隐藏单元数量。在LN中,同一个层共享 μ \mu μ和 σ \sigma σ, but different training cases have different normalization terms. Unlike batch normalization, layer normalization does not impose any constraint on the size of a mini-batch and it can be used in the pure online regime with batch size 1.
In a standard RNN, the summed inputs in the recurrent layer are computed from the current input x t \mathbf{x}^t xt and previous vector of hidden states h t − 1 \mathbf{h}^{t-1} ht−1 which are computed as a t = W h h h t − 1 + W x h x t \mathbf{a}^t=W_{h h} h^{t-1}+W_{x h} \mathbf{x}^t at=Whhht−1+Wxhxt. The layer normalized recurrent layer re-centers and re-scales its activations using the extra normalization terms :
h t = f [ g σ t ⊙ ( a t − μ t ) + b ] μ t = 1 H ∑ i = 1 H a i t σ t = 1 H ∑ i = 1 H ( a i t − μ t ) 2 \mathbf{h}^t=f\left[\frac{\mathbf{g}}{\sigma^t} \odot\left(\mathbf{a}^t-\mu^t\right)+\mathbf{b}\right] \quad \mu^t=\frac{1}{H} \sum_{i=1}^H a_i^t \quad \sigma^t=\sqrt{\frac{1}{H} \sum_{i=1}^H\left(a_i^t-\mu^t\right)^2} ht=f[σtg⊙(at−μt)+b]μt=H1i=1∑Haitσt=H1i=1∑H(ait−μt)2
where W h h W_{h h} Whh is the recurrent hidden to hidden weights and W x h W_{x h} Wxh are the bottom up input to hidden weights. ⊙ \odot ⊙ is the element-wise multiplication between two vectors. b \mathbf{b} b and g \mathbf{g} g are defined as the bias and gain parameters of the same dimension as h t \mathbf{h}^t ht.
在标准RNN中存在梯度爆炸和消失问题,用了LN之后会更加稳定。
贴两个图便于理解:
视频讲解可以参考:What is Layer Normalization? | Deep Learning Fundamentals
代码实现
这边贴一个Restormer中的LN层的实现
首先定义两个函数用于reshape。4d到3d不需要参数,因为只需要把已有的两个维度合并;3d到4d需要参数,因为需要把一个维度分成两个维度
def to_3d(x):return rearrange(x, 'b c h w -> b (h w) c')def to_4d(x,h,w):return rearrange(x, 'b (h w) c -> b c h w',h=h,w=w)
定义一个没有bias的LN层,weight是可学习的参数,所以用 n n . P a r a m e t e r nn.Parameter nn.Parameter包装
# 没有bias的LayerNorm层
class BiasFree_LayerNorm(nn.Module):def __init__(self, normalized_shape):super(BiasFree_LayerNorm, self).__init__()if isinstance(normalized_shape, numbers.Integral):normalized_shape = (normalized_shape,)normalized_shape = torch.Size(normalized_shape)assert len(normalized_shape) == 1self.weight = nn.Parameter(torch.ones(normalized_shape))self.normalized_shape = normalized_shapedef forward(self, x):#x的维度(batch_size, height x width, channels)#sigma的维度(batch_size, height x width, 1)sigma = x.var(-1, keepdim=True, unbiased=False)return x / torch.sqrt(sigma+1e-5) * self.weight
定义一个有bias的LN层,同样的,weight和bias都是可学习的参数
class WithBias_LayerNorm(nn.Module):def __init__(self, normalized_shape):super(WithBias_LayerNorm, self).__init__()#如果输入的normalized_shape是个整数,则化为元组if isinstance(normalized_shape, numbers.Integral):normalized_shape = (normalized_shape,)normalized_shape = torch.Size(normalized_shape)assert len(normalized_shape) == 1self.weight = nn.Parameter(torch.ones(normalized_shape))#比上面多定义一个biasself.bias = nn.Parameter(torch.zeros(normalized_shape))self.normalized_shape = normalized_shapedef forward(self, x):mu = x.mean(-1, keepdim=True)sigma = x.var(-1, keepdim=True, unbiased=False)return (x - mu) / torch.sqrt(sigma+1e-5) * self.weight + self.bias#这边加了bias把上面的函数包装起来,定义一个统一的层规范化函数
class LayerNorm(nn.Module):def __init__(self, dim, LayerNorm_type):super(LayerNorm, self).__init__()if LayerNorm_type =='BiasFree':self.body = BiasFree_LayerNorm(dim)else:self.body = WithBias_LayerNorm(dim)def forward(self, x):h, w = x.shape[-2:]return to_4d(self.body(to_3d(x)), h, w)
相关文章:
Layer Normalization(层规范化)
详细内容在这篇论文:Layer Normalization 训练深度神经网络需要大量的计算,减少计算时间的一个有效方法是规范化神经元的活动,例如批量规范化BN(batch normalization)技术,然而,批量规范化对小批…...

redisson参数配置
文章目录 pom配置链接配置建议 pom <!-- 引入spring-data-redis组件 --> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-redis</artifactId><exclusions><!-- 因springboot2.x…...

【基于Arduino的仿生蚂蚁机器人】
【基于Arduino的仿生蚂蚁机器人】 1. 概述2. Arduino六足位移台–蚂蚁机器人3D模型3. 3D 打印零件4. 组装Arduino六足位移台5. Arduino蚂蚁机器人电路图6. 为Arduino Hexapod设计PCB7. 组装电路板8. 系统代码9. Arduino蚂蚁机器人安卓应用程序在本教程中,我将向您展示如何构建…...

angular12里面FormGroup做多个项目的相关check
FromFroup在鼠标失去焦点时做相关check,可以在group方法第二个参数的位置加一个对象参数 { validator: this.checkPasswords } 在Angular 12中,可以使用formGroup来进行两个密码是否一致的检查。以下是一个示例: 首先,在组件的…...

TypeScript 的发展与基本语法
目录 一、为什么什么是TypeScript? 1、发展历史 2、typescript与javascript 3、静态类型的好处 二、基础语法 1、基础数据类型 2、补充类型 3、泛型 4、泛型的高级语法 5、类型别名&类型断言 6、字符串/数字 字面量 三、高级类型 1、联合/交叉类型…...
)
macOS - 上编译运行 risc-v (spike)
文章目录 一、说明二、安装步骤三、测试 一、说明 本文根据以下文章改编: RISC-V 环境配置 https://decaf-lang.github.io/minidecaf-tutorial/docs/step0/riscv_env.html 相关链接: riscv-gnu-toolchain GNU toolchain for RISC-V, including GCC ht…...
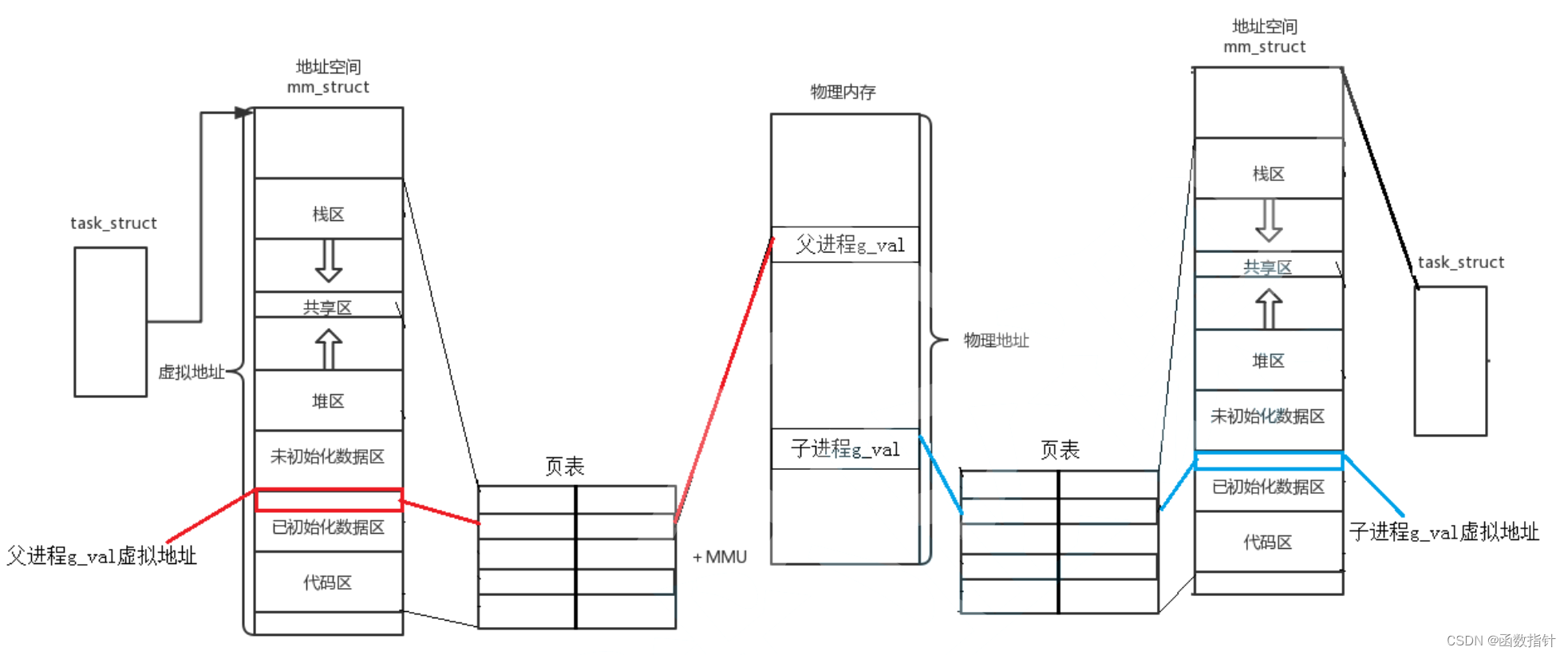
Linux--线程地址空间
1.程序地址空间 先来就看这张图 这是一张程序地址分布的图,通过一段代码来证明地址空间的分布情况 编译结果: 可以看出的是,父子进程中对于同一个变量打印的地址是一样的,这是因为子进程以父进程为模板,因为都没有对数…...

华为OD机试 - 最佳植树距离 - 二分查找(Java 2023 B卷 100分)
目录 一、题目描述二、输入描述三、输出描述四、备注说明五、二分查找六、解题思路七、Java算法源码八、效果展示1、输入2、输出3、说明 一、题目描述 按照环保公司要求,小明需要在沙化严重的地区进行植树防沙工作,初步目标是种植一条直线的树带。 由于…...
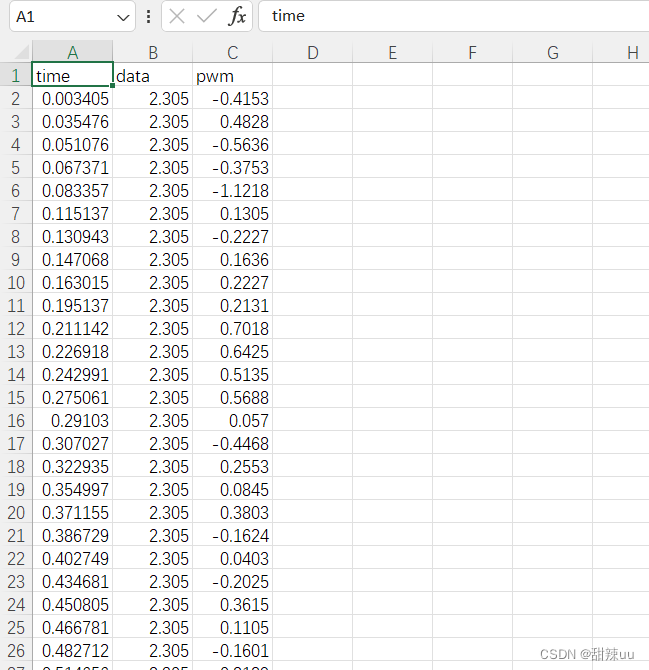
RNN+LSTM正弦sin信号预测 完整代码数据视频教程
视频讲解:RNN+LSTM正弦sin信号预测_哔哩哔哩_bilibili 效果演示: 数据展示: 完整代码: import torch import torch.nn as nn import torch.optim as optim import numpy as np import matplotlib.pyplot as plt import pandas as pd from sklearn.preprocessing import…...
bpmn-js开启只读状态)
如何自己实现一个丝滑的流程图绘制工具(四)bpmn-js开启只读状态
背景 流程图需要支持只读状态和编辑状态 翻看官方案例源码,扒拉到了禁用的js代码 DisableModeling.js const TOGGLE_MODE_EVENT toggleMode const HIGH_PRIORITY 10001export default function DisableModeling(eventBus,contextPad,dragging,directEditing,e…...

字节跳动 Git 的正确使用姿势与最佳实践
版本控制Git 黑马&尚硅谷 Git的前世今生 方向介绍 为什么要学习Git 1.0 Git是什么 1.1 版本控制 1.1.1 本地版本控制 1.1.2 集中版本控制 1.1.3 分布式版本控制 我们已经把三个不同的版本控制系统介绍完了,Git 作为分布式版本控制工具, 虽然目前来讲…...
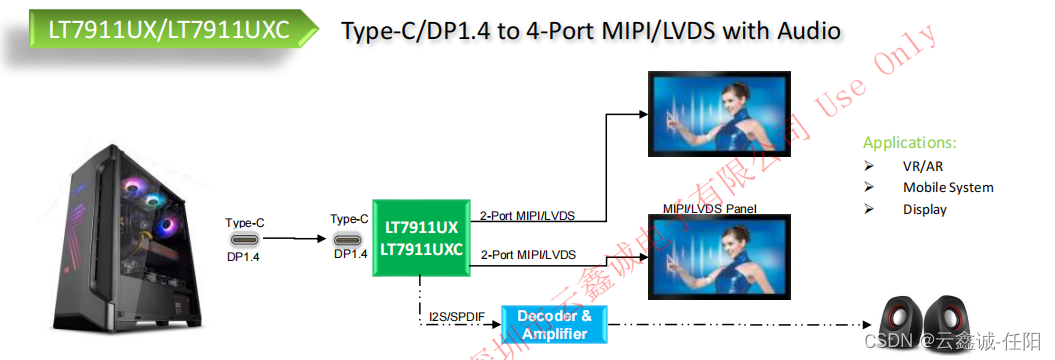
龙迅LT7911UX TYPE-C/DP转MIPI/LVDS,内有HDCP
1. 描述 LT7911UX是一种高性能的Type-C/DP1.4a到MIPI或LVDS芯片。HDCP RX作为HDCP中继器的上游端,可以与其他芯片的HDCP TX协同工作,实现中继器的功能。 对于DP1.4a输入,LT7911UX可以配置为1/2/4车道。自适应均衡使其适用于长电缆应用&#…...

Spearman Footrule距离
Spearman Footrule距离是一种用于衡量两个排列之间差异的指标。它衡量了将一个排列变换为另一个排列所需的操作步骤,其中每个操作步骤都是交换相邻元素。具体而言,Spearman Footrule距离是每个元素在两个排列中的排名差的绝对值之和。 这个指标的名字中…...
docker 安装 Wordpress 用lnmp搭建出现的故障
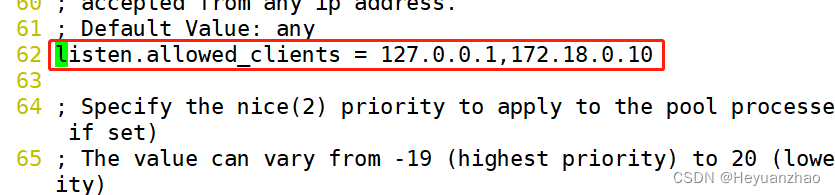
第一个故障就是mysql出现的故障了 你起mysql镜像是这么起的导致pid号用不了 docker run --namemysql -d --privileged --device-write-bps /dev/sda:10M -v /usr/local/mysql --net mynetwork --ip 172.20.0.20 mysql:lnmp 解决方法 docker run --namemysql -d --privilege…...

【C++入门到精通】C++入门 —— 继承(基类、派生类和多态性)
阅读导航 前言一、继承的概念及定义1. 继承的概念2.继承的定义⭕定义格式⭕继承关系和访问限定符⭕继承基类成员访问方式的变化 二、基类和派生类对象赋值转换三、继承中的作用域四、派生类的默认成员函数五、继承与友元六、继承与静态成员七、复杂的菱形继承及菱形虚拟继承⭕单…...
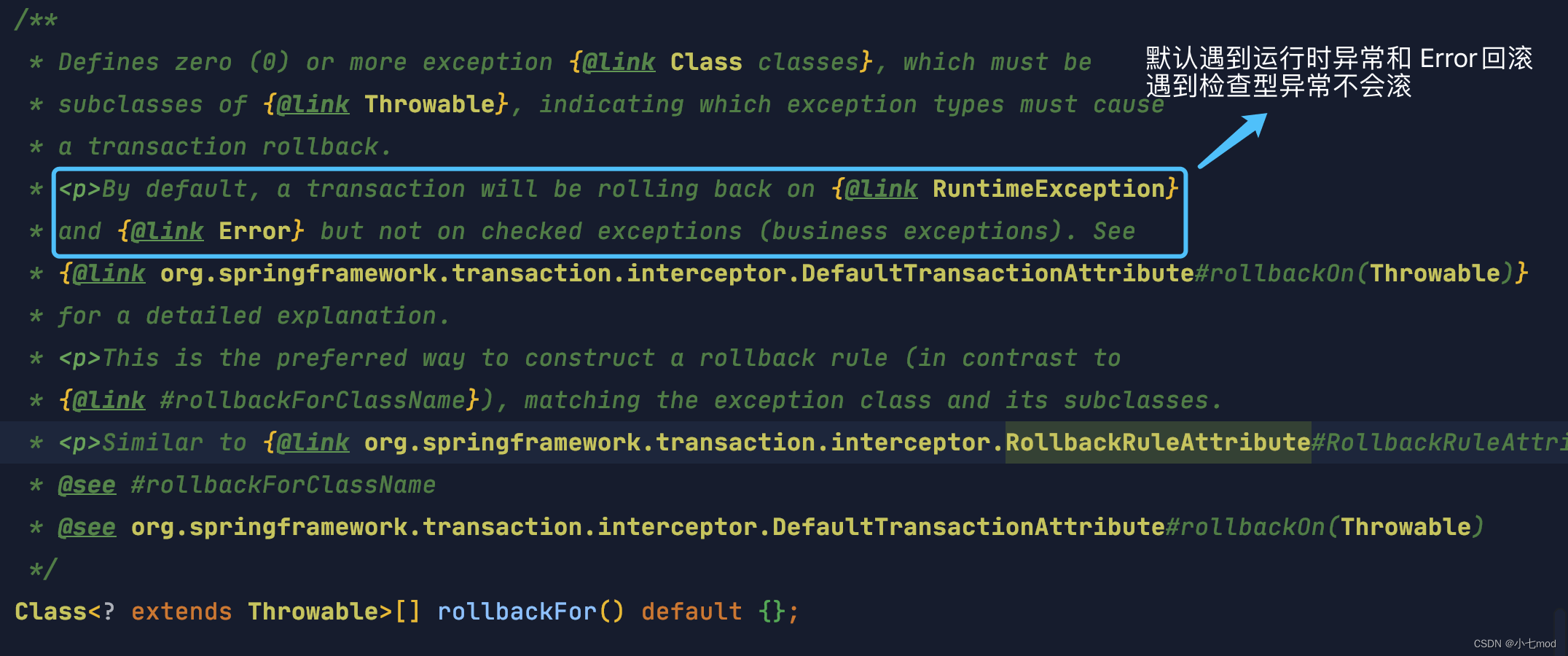
【Spring框架】Spring事务的介绍与使用方法
⚠️ 再提醒一次:Spring 本身并不实现事务,Spring事务 的本质还是底层数据库对事务的支持。你的程序是否支持事务首先取决于数据库 ,比如使用 MySQL 的话,如果你选择的是 innodb 引擎,那么恭喜你,是可以支持…...

七夕特别篇 | 浪漫的Bug
文章目录 前言一、迷失的爱情漩涡(多线程中的错误同步)1.1 Bug 背景1.2 Bug 分析1.3 Bug 解决 二、心形积分之恋(心形面积计算中的数值积分误差)1.1 Bug 背景1.1.1 背景1.1.2 数学模型 1.2 Bug 分析1.2.1 初始代码1.2.2 代码工作流…...
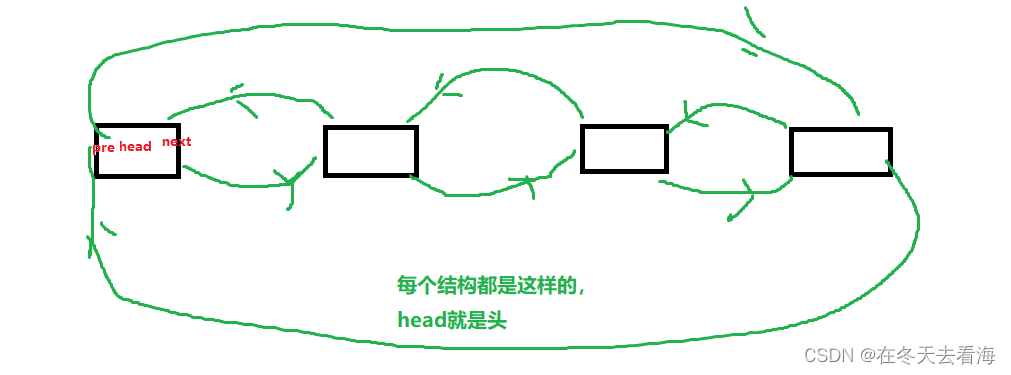
数据结构双向链表
Hello,好久不见,今天我们讲链表的双向链表,这是一个很厉害的链表,带头双向且循环,学了这个链表,你会发现顺序表的头插头删不再是一个麻烦问题,单链表的尾插尾删也变得简单起来了,那废…...
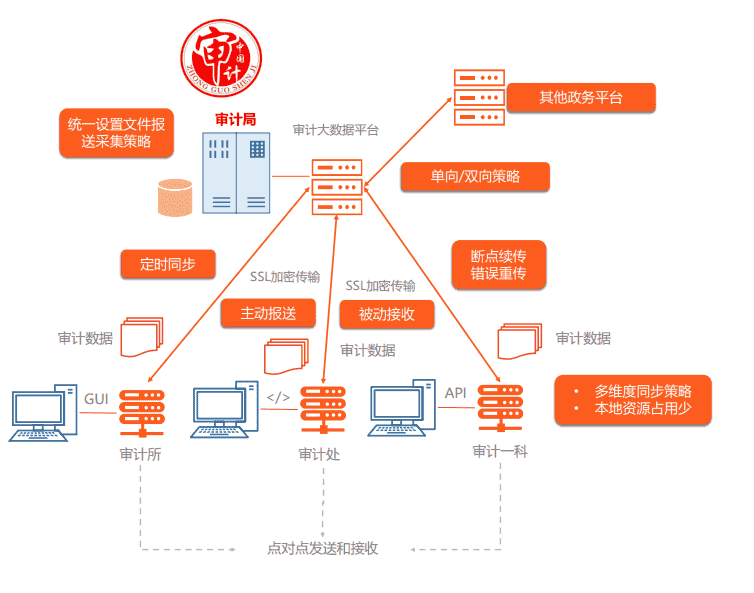
解决政务审计大数据传输难题!镭速传输为政务行业提供解决方案
政务行业是国家治理的重要组成部分,涉及到国家安全、社会稳定、民生福祉等方面。随着信息技术的快速发展和革新,政务信息化也迎来了新一轮的升级浪潮。国家相继出台了《国家信息化发展战略纲要》《“十三五”国家信息化规划》《“十四五”推进国家政务信…...
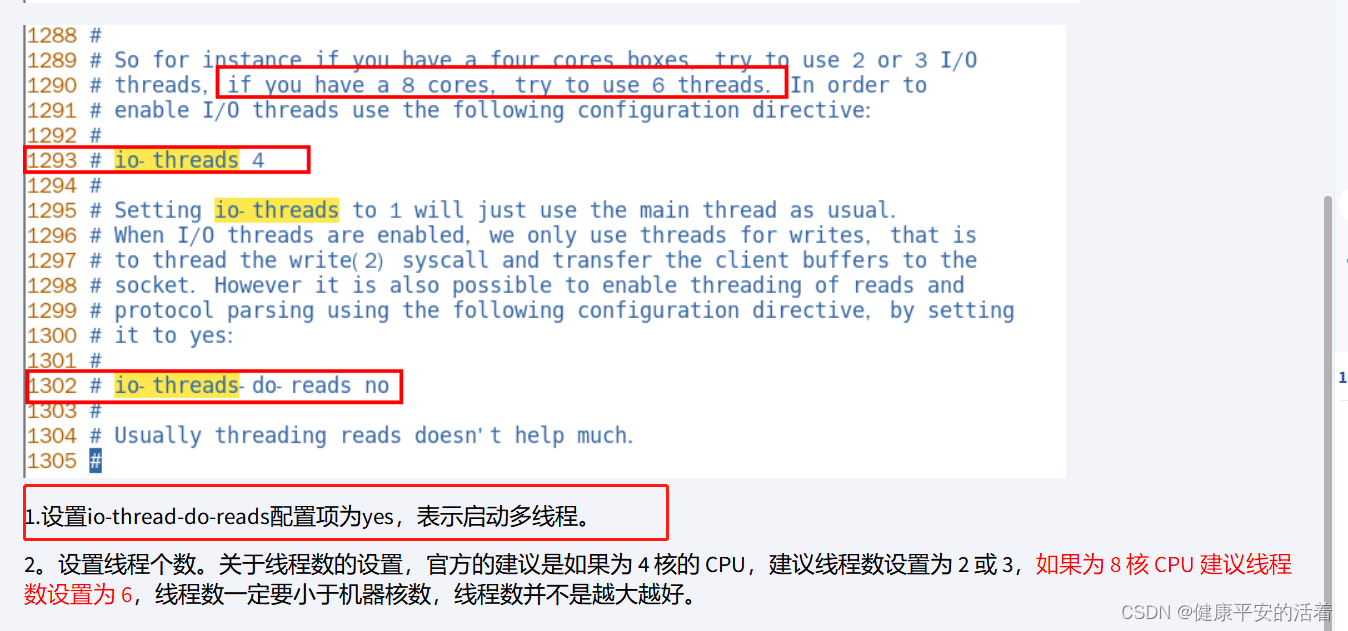
redis 7高级篇1 redis的单线程与多线程
一 redis单线程与多线程 1.1 redis单线程&多线程 1.redis的单线程 redis单线程主要是指Redis的网络IO和键值对读写是由一个线程来完成的,Redis在处理客户端的请求时包括获取 (socket 读)、解析、执行、内容返回 (socket 写) 等都由一个顺序串行的主线程处理…...

为什么你的Perplexity症状查询总返回模糊答案?——解析LLM医学知识蒸馏偏差、实体链接断层与实时性衰减问题
更多请点击: https://kaifayun.com 第一章:Perplexity症状查询功能的临床价值与典型失效场景 Perplexity症状查询功能在临床决策支持系统中承担着语义级症状归一化与鉴别诊断初筛的关键角色。它通过将患者自然语言描述(如“饭后右上腹闷胀、…...

企业Agent落地:从0到1搭建员工Agent体系
一、项目背景 某中型企业在数字化转型过程中遇到以下痛点: 合同审批流程平均耗时3天,效率低下员工每天约30%的时间花在重复操作上流程规则散落在员工经验中,难以标准化缺乏统一的操作审计和权限管理 二、落地路径 阶段一:验证…...

非规则区域上空间分数阶偏微分方程的有限元方法【附仿真】
✨ 长期致力于空间分数阶导数、高维问题、有限元方法、非规则区域、非结构化网格、非光滑解研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)二维非规则…...

Vibe Coding 工具选型决策树:5 类项目场景对应 7 种组合配置方案
1. 项目概述:为什么“选对组合”比“选对单个工具”更重要 大多数人第一次听说 vibe coding,是在看到某位工程师用 Cursor 写完一个 Vue3 表单组件只花了 90 秒,或者用 Claude Code 在 VS Code 里补全了整套 Express 路由逻辑后脱口而出的那句“这哪是写代码,这是调 API”…...

SWAT建模效率翻倍:利用ArcGIS模型构建器自动化处理HWSD土壤数据全流程
SWAT建模效率革命:ArcGIS模型构建器全自动处理HWSD土壤数据实战指南 当你在凌晨三点盯着屏幕上第七次重复运行的"Extract by Mask"工具,看着进度条缓慢爬升时,是否想过这些机械化的操作本可以一键完成?本文将为中高级SW…...

你的微信聊天记录,真的安全吗?揭秘永久保存数字记忆的开源方案
你的微信聊天记录,真的安全吗?揭秘永久保存数字记忆的开源方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHu…...

ARM ETM10硬件追踪系统设计与信号完整性优化
1. ARM ETM10硬件追踪系统设计精要在嵌入式系统开发领域,ARM ETM10(Embedded Trace Macrocell)作为一款高性能硬件追踪模块,为开发者提供了处理器指令和数据流的实时可视性。不同于软件调试工具,ETM10通过在芯片内部直…...

causal-learn实战指南:从算法选择到因果图解读
1. 为什么你需要causal-learn? 第一次接触因果发现这个概念时,我正被一个电商用户行为分析项目搞得焦头烂额。传统机器学习模型能准确预测用户是否会购买商品,但产品经理总追着我问:"到底哪些因素真正导致了购买行为…...

运算放大器:从虚短虚断到负反馈,掌握模拟电路核心设计
1. 从“石头”与“水库”到“运算放大器”:一个电子世界的演化故事如果你拆开过任何一台现代电子设备,从手机到汽车,从血糖仪到工业机器人,你大概率会找到一个或多个不起眼的八脚或十四脚黑色小方块——运算放大器。它不像CPU那样…...

HPM6750 BGA196封装XPI0 CA端口缺失的CB端口启动解决方案
1. 项目概述与核心挑战最近在做一个对PCB尺寸有严格限制的嵌入式项目,主控芯片选用了先楫半导体的高性能MCU HPM6750。为了压缩板子面积,我放弃了引脚更丰富的BGA289封装(HPM6750IVM2),转而选择了更紧凑的BGA196封装&a…...