机器学习笔记之优化算法(十九)牛顿法与正则化
机器学习笔记之优化算法——再回首:牛顿法与正则化
- 引言
- 回顾:经典牛顿法及其弊端
- 牛顿法:算法步骤
- 迭代过程中可能出现的问题
- 正则化 Hessian Matrix \text{Hessian Matrix} Hessian Matrix与相应问题
引言
本节我们介绍经典牛顿法在训练神经网络过程中的迭代步骤,并介绍正则化在牛顿法中的使用逻辑。
回顾:经典牛顿法及其弊端
经典牛顿法自身是一个典型的线搜索方法 ( Line-Search Method ) (\text{Line-Search Method}) (Line-Search Method)。它的迭代过程使用数学符号表示如下:
x k + 1 = x k + α k ⋅ P k x_{k+1} = x_k + \alpha_k \cdot \mathcal P_k xk+1=xk+αk⋅Pk
其中标量 α k \alpha_k αk表示当前第 k k k次迭代情况下的更新步长;向量 P k \mathcal P_k Pk表示当前迭代步骤的更新方向。与梯度下降法区分的是,在经典牛顿法中:
- 步长并不是我们关注的信息,我们通常设置 α k = 1 ( k = 1 , 2 , 3 , ⋯ ) \alpha_k = 1(k=1,2,3,\cdots) αk=1(k=1,2,3,⋯),从而迭代结果 x k + 1 x_{k+1} xk+1可看作是关于方向变量 P \mathcal P P的函数:
而P k \mathcal P_k Pk则表示当前迭代步骤的最优更新方向。
{ x k + 1 = x k + P P k = arg min P f ( x k + 1 ) = arg min P f ( x k + P ) \begin{cases} \begin{aligned} x_{k+1} & = x_k + \mathcal P \\ \mathcal P_k & = \mathop{\arg\min}\limits_{\mathcal P} f(x_{k+1}) \\ & = \mathop{\arg\min}\limits_{\mathcal P} f(x_k + \mathcal P) \end{aligned} \end{cases} ⎩ ⎨ ⎧xk+1Pk=xk+P=Pargminf(xk+1)=Pargminf(xk+P) - 关于目标函数 f ( ⋅ ) f(\cdot) f(⋅),我们对其要求是: f ( ⋅ ) f(\cdot) f(⋅)至少二阶可微。这意味着 Hessian Matrix ⇒ ∇ 2 f ( ⋅ ) \text{Hessian Matrix} \Rightarrow \nabla^2 f(\cdot) Hessian Matrix⇒∇2f(⋅)存在。因此对目标函数 f ( x k + P ) f(x_k + \mathcal P) f(xk+P)进行二阶泰勒展开:
f ( x k + P ) = ϕ ( P ) = f ( x k ) + 1 1 ! [ ∇ f ( x k ) ] T P + 1 2 ! P T [ ∇ 2 f ( x k ) ] ⋅ P + O ( ∥ P ∥ 2 ) f(x_k + \mathcal P) = \phi(\mathcal P) = f(x_k) + \frac{1}{1!} [\nabla f(x_k)]^T \mathcal P + \frac{1}{2!} \mathcal P^T [\nabla^2 f(x_k)] \cdot \mathcal P + \mathcal O(\|\mathcal P\|^2) f(xk+P)=ϕ(P)=f(xk)+1!1[∇f(xk)]TP+2!1PT[∇2f(xk)]⋅P+O(∥P∥2)
忽略掉高阶无穷小 O ( ∥ P ∥ 2 ) \mathcal O(\|\mathcal P\|^2) O(∥P∥2),通过令 ∇ ϕ ( P ) ≜ 0 \nabla \phi(\mathcal P) \triangleq 0 ∇ϕ(P)≜0来求解 P k \mathcal P_k Pk,使 ϕ ( P k ) \phi(\mathcal P_k) ϕ(Pk)取得最小值:
∇ ϕ ( P ) ≜ 0 ⇒ ∇ 2 f ( x k ) ⋅ P = − ∇ f ( x k ) \nabla \phi(\mathcal P) \triangleq 0 \Rightarrow \nabla^2 f(x_k) \cdot \mathcal P = -\nabla f(x_k) ∇ϕ(P)≜0⇒∇2f(xk)⋅P=−∇f(xk)
我们称该方程组为牛顿方程:- 如果 ∇ 2 f ( ⋅ ) \nabla^2 f(\cdot) ∇2f(⋅)在 x k x_k xk出的 Hessian Matrix ⇒ ∇ 2 f ( x k ) \text{Hessian Matrix} \Rightarrow \nabla^2 f(x_k) Hessian Matrix⇒∇2f(xk)是正定矩阵,那么:本次迭代步骤存在合适的 P k \mathcal P_k Pk,使 ϕ ( P k ) \phi(\mathcal P_k) ϕ(Pk)达到最小值:
需要注意的是,这仅仅是当前迭代步骤的最小值,而不是全局最小值。
P k = − [ ∇ 2 f ( x k ) ] − 1 ∇ f ( x k ) \mathcal P_k = - [\nabla^2 f(x_k)]^{-1} \nabla f(x_k) Pk=−[∇2f(xk)]−1∇f(xk)
并且解 P k \mathcal P_k Pk描述的方向一定是下降方向。 - 相反,如果 ∇ 2 f ( x k ) \nabla^2 f(x_k) ∇2f(xk)不是正定矩阵,那么至少说:无法直接求解,方程组 ∇ 2 f ( x k ) ⋅ P = − ∇ f ( x k ) \nabla^2 f(x_k) \cdot \mathcal P = -\nabla f(x_k) ∇2f(xk)⋅P=−∇f(xk)的解是 P k \mathcal P_k Pk的解。
- 如果 ∇ 2 f ( ⋅ ) \nabla^2 f(\cdot) ∇2f(⋅)在 x k x_k xk出的 Hessian Matrix ⇒ ∇ 2 f ( x k ) \text{Hessian Matrix} \Rightarrow \nabla^2 f(x_k) Hessian Matrix⇒∇2f(xk)是正定矩阵,那么:本次迭代步骤存在合适的 P k \mathcal P_k Pk,使 ϕ ( P k ) \phi(\mathcal P_k) ϕ(Pk)达到最小值:
牛顿法:算法步骤
在训练神经网络的方法中,牛顿法是二阶近似方法的代表。这里为了简单表述,将上面提到的目标函数 f ( ⋅ ) f(\cdot) f(⋅)具象化为经验风险 ( Empirical Risk ) (\text{Empirical Risk}) (Empirical Risk):
J ( θ ) = E P d a t a { L [ G ( x ( i ) ; θ ) , y ( i ) ] } = 1 N ∑ i = 1 N L [ G ( x ( i ) ; θ ) , y ( i ) ] P d a t a = { ( x ( i ) , y ( i ) ) } i = 1 N \begin{aligned} \mathcal J(\theta) & = \mathbb E_{\mathcal P_{data}} \left\{\mathcal L[\mathcal G(x^{(i)};\theta),y^{(i)}]\right\} \\ & = \frac{1}{N} \sum_{i=1}^N \mathcal L [\mathcal G(x^{(i)};\theta),y^{(i)}] \end{aligned}\quad P_{data} = \{(x^{(i)},y^{(i)})\}_{i=1}^N J(θ)=EPdata{L[G(x(i);θ),y(i)]}=N1i=1∑NL[G(x(i);θ),y(i)]Pdata={(x(i),y(i))}i=1N
其中 θ \theta θ可看作是需要学习的模型参数; G ( ⋅ ) \mathcal G(\cdot) G(⋅)可看作是模型关于 x x x的预测函数; L ( ⋅ ) \mathcal L(\cdot) L(⋅)可看作是损失函数,描述预测结果与真实标签的差异性信息。
假设 θ 0 \theta_0 θ0表示当前迭代过程的起始位置,是已知项;而 θ \theta θ是一个变量,描述当前迭代过程结束后的参数位置。这里直接使用: θ − θ 0 \theta -\theta_0 θ−θ0表示当前迭代步骤的更新方向,对 J ( θ ) \mathcal J(\theta) J(θ)进行二阶泰勒展开:
实际上,书中θ − θ 0 \theta - \theta_0 θ−θ0本身就将步长 α = 1 \alpha = 1 α=1包含在内。这里关于J ( θ ) \mathcal J(\theta) J(θ)高于二阶的高阶无穷小直接省略掉了~关于Hessian Matrix ⇒ ∇ 2 J ( θ 0 ) \text{Hessian Matrix} \Rightarrow \nabla^2 \mathcal J(\theta_0) Hessian Matrix⇒∇2J(θ0)直接使用H \mathcal H H进行表示。
J ( θ ) ≈ J ( θ 0 ) + 1 1 ! ( θ − θ 0 ) T ∇ θ J ( θ 0 ) + 1 2 ! ( θ − θ 0 ) T H ( θ − θ 0 ) \mathcal J(\theta) \approx \mathcal J(\theta_0) + \frac{1}{1!}(\theta - \theta_0)^T \nabla_{\theta} \mathcal J(\theta_0) + \frac{1}{2!}(\theta - \theta_0)^T \mathcal H (\theta - \theta_0) J(θ)≈J(θ0)+1!1(θ−θ0)T∇θJ(θ0)+2!1(θ−θ0)TH(θ−θ0)
依然令 ∇ J ( θ ) ≜ 0 \nabla \mathcal J(\theta) \triangleq 0 ∇J(θ)≜0,有:
∇ J ( θ ) = ( 1 − 0 ) ⋅ ∇ J θ ( θ 0 ) + 1 2 ⋅ 2 ( θ − θ 0 ) ⋅ H ≜ 0 ⇒ H ( θ − θ 0 ) = − ∇ J θ ( θ 0 ) \begin{aligned} \nabla\mathcal J(\theta) & = (1 - 0) \cdot \nabla \mathcal J_{\theta}(\theta_0) + \frac{1}{2} \cdot 2 (\theta - \theta_0)\cdot \mathcal H \triangleq 0\\ & \Rightarrow \mathcal H(\theta - \theta_0) = -\nabla \mathcal J_{\theta}(\theta_0) \end{aligned} ∇J(θ)=(1−0)⋅∇Jθ(θ0)+21⋅2(θ−θ0)⋅H≜0⇒H(θ−θ0)=−∇Jθ(θ0)
假设 H \mathcal H H是正定的条件下,关于 θ \theta θ与 θ 0 \theta_0 θ0的递推关系表示如下:
θ = θ 0 − H − 1 ∇ θ J ( θ 0 ) \theta = \theta_0 - \mathcal H^{-1} \nabla_{\theta} \mathcal J(\theta_0) θ=θ0−H−1∇θJ(θ0)
基于递推关系,对应的算法步骤表示如下:
-
初始化:初始参数 θ s t a r t \theta_{start} θstart以及包含 N N N个样本的训练数据集;
-
While \text{While} While:
- 计算 ∇ θ J ( θ 0 ) \nabla_{\theta} \mathcal J(\theta_0) ∇θJ(θ0):
牛顿-莱布尼兹公式~,这是书上的表达。详细位置见末尾~
∇ θ J ( θ 0 ) = ∇ θ { 1 N ∑ i = 1 N L [ G ( x ( i ) ; θ 0 ) , y ( i ) ] } = 1 N ∇ θ ∑ i = 1 N L [ G ( x ( i ) ; θ 0 ) , y ( i ) ] \begin{aligned} \nabla_{\theta} \mathcal J(\theta_0) & = \nabla_{\theta} \left\{\frac{1}{N} \sum_{i=1}^N \mathcal L[\mathcal G(x^{(i)};\theta_0),y^{(i)}]\right\} \\ & = \frac{1}{N} \nabla_{\theta} \sum_{i=1}^N \mathcal L[\mathcal G(x^{(i)};\theta_0),y^{(i)}] \end{aligned} ∇θJ(θ0)=∇θ{N1i=1∑NL[G(x(i);θ0),y(i)]}=N1∇θi=1∑NL[G(x(i);θ0),y(i)] - 计算 θ 0 \theta_0 θ0位置的 Hessian Matrix ⇒ H \text{Hessian Matrix} \Rightarrow \mathcal H Hessian Matrix⇒H:
该公式同样也是书上描述。
H = ∇ θ 2 J ( θ 0 ) = ∇ θ 2 { 1 N ∑ i = 1 N L [ G ( x ( i ) ; θ 0 ) , y ( i ) ] } = 1 N ∇ θ 2 ∑ i = 1 N L [ G ( x ( i ) ; θ 0 ) , y ( i ) ] \begin{aligned} \mathcal H & = \nabla_{\theta}^2 \mathcal J(\theta_0) \\ & = \nabla_{\theta}^2 \left\{\frac{1}{N} \sum_{i=1}^N \mathcal L[\mathcal G(x^{(i)};\theta_0),y^{(i)}]\right\} \\ & = \frac{1}{N} \nabla_{\theta}^2 \sum_{i=1}^N \mathcal L[\mathcal G(x^{(i)};\theta_0),y^{(i)}] \end{aligned} H=∇θ2J(θ0)=∇θ2{N1i=1∑NL[G(x(i);θ0),y(i)]}=N1∇θ2i=1∑NL[G(x(i);θ0),y(i)] - 计算 Hessian Matrix \text{Hessian Matrix} Hessian Matrix的逆: H − 1 \mathcal H^{-1} H−1;
- 计算变量 θ \theta θ的变化量 Δ θ \Delta \theta Δθ:
Δ θ = − H − 1 ∇ θ J ( θ 0 ) \Delta \theta = -\mathcal H^{-1} \nabla_{\theta} \mathcal J(\theta_0) Δθ=−H−1∇θJ(θ0) - 对变量 θ \theta θ进行更新:
θ = θ 0 + Δ θ \theta = \theta_0 + \Delta \theta θ=θ0+Δθ
- 计算 ∇ θ J ( θ 0 ) \nabla_{\theta} \mathcal J(\theta_0) ∇θJ(θ0):
-
End While \text{End While} End While
迭代过程中可能出现的问题
观察上述迭代步骤,一个核心问题是:该算法必须建立在迭代过程中,各步骤的 θ \theta θ对应的 Hessian Matrix \text{Hessian Matrix} Hessian Matrix必须均是正定的,否则 H − 1 \mathcal H^{-1} H−1无法求解。在凸函数 VS \text{VS} VS强凸函数中介绍过关于强凸函数的二阶条件:如果函数 f ( ⋅ ) f(\cdot) f(⋅)二阶可微,有:
其中 I \mathcal I I表示单位矩阵。
f ( ⋅ ) is m-Strong Convex ⇔ ∇ 2 f ( x ) ≽ m ⋅ I f(\cdot) \text{is m-Strong Convex} \Leftrightarrow \nabla^2 f(x) \succcurlyeq m \cdot \mathcal I f(⋅)is m-Strong Convex⇔∇2f(x)≽m⋅I
也就是说:要想 H = ∇ θ 2 J ( θ 0 ) \mathcal H = \nabla_{\theta}^2 \mathcal J(\theta_0) H=∇θ2J(θ0)正定,必然需要目标函数 J ( θ ) \mathcal J(\theta) J(θ)在 θ = θ 0 \theta= \theta_0 θ=θ0处不仅是凸的,甚至是强凸的。
但在深度学习中,目标函数的表面由于特征较多,从而在局部呈现非凸的情况。例如鞍点,二阶梯度函数 ∇ θ 2 J ( θ ) \nabla_{\theta}^2 \mathcal J(\theta) ∇θ2J(θ)在该处的特征值并不都是正的,也就是说:鞍点处的 Hessian Matrix \text{Hessian Matrix} Hessian Matrix可能不是正定的,从而可能导致在该点出迭代过程中选择的 θ \theta θ,使得更新方向 θ − θ 0 \theta - \theta_0 θ−θ0是个错误的方向。
正则化 Hessian Matrix \text{Hessian Matrix} Hessian Matrix与相应问题
上述情况可以使用正则化 Hessian Matrix \text{Hessian Matrix} Hessian Matrix来避免。一种常用的正则化策略是 Hessian Matrix \text{Hessian Matrix} Hessian Matrix加上一个对角线元素均为 α \alpha α的对角阵:
θ = θ 0 − [ ∇ θ 2 J ( θ 0 ) ⏟ H + α ⋅ I ] − 1 ∇ θ J ( θ 0 ) \theta = \theta_0 - \left[\underbrace{\nabla_{\theta}^2 \mathcal J(\theta_0)}_{\mathcal H} + \alpha \cdot \mathcal I\right]^{-1} \nabla_{\theta} \mathcal J(\theta_0) θ=θ0− H ∇θ2J(θ0)+α⋅I −1∇θJ(θ0)
这种操作我们早在正则化与岭回归中就已介绍过。由于 Hessian Matrix ⇒ H \text{Hessian Matrix} \Rightarrow \mathcal H Hessian Matrix⇒H至少是实对称矩阵,那么必然有:
H = Q Λ Q T Q Q T = Q T Q = I \mathcal H = \mathcal Q\Lambda \mathcal Q^T \quad \mathcal Q\mathcal Q^T = \mathcal Q^T\mathcal Q = \mathcal I H=QΛQTQQT=QTQ=I
并且 λ I = Q ( λ I ) Q T \lambda \mathcal I = \mathcal Q(\lambda \mathcal I) \mathcal Q^T λI=Q(λI)QT,从而 H + λ ⋅ I \mathcal H + \lambda \cdot \mathcal I H+λ⋅I可表示为:
H + λ ⋅ I = Q Λ Q T + Q ( λ I ) Q T = Q ( Λ + λ I ) Q T \begin{aligned} \mathcal H + \lambda \cdot \mathcal I & = \mathcal Q \Lambda\mathcal Q^T + \mathcal Q(\lambda \mathcal I) \mathcal Q^T \\ & = \mathcal Q(\Lambda + \lambda \mathcal I) \mathcal Q^T \end{aligned} H+λ⋅I=QΛQT+Q(λI)QT=Q(Λ+λI)QT
这相当于:给 H \mathcal H H的所有特征值加上一个正值 α \alpha α。
相比于最小二乘法模型参数 W \mathcal W W的矩阵形式表达: W = ( X T X ) − 1 X T Y \mathcal W = (\mathcal X^T \mathcal X)^{-1} \mathcal X^T \mathcal Y W=(XTX)−1XTY, H \mathcal H H可能更不稳定。因为 X T X \mathcal X^T\mathcal X XTX必然是半正定的,但 H \mathcal H H中的特征值有可能是负的。
由于 H \mathcal H H中的特征值有可能是负的,甚至是负定矩阵。如果 H \mathcal H H中存在特征值负的很厉害的情况下(存在很强的负曲率),我们需要增大 α \alpha α结果来抵消负特征值。如果 α \alpha α持续增大,对应特征值可能会被 α \alpha α主导。从而导致迭代步骤选择的方向收敛到 1 α × \begin{aligned}\frac{1}{\alpha} \times\end{aligned} α1×普通梯度。
使用牛顿法训练大型的神经网络,更多还受限于计算负担。由于 H ∈ R p × p \mathcal H \in \mathbb R^{p \times p} H∈Rp×p,其中 p p p表示样本特征维度,求解 H − 1 \mathcal H^{-1} H−1的时间复杂度是 O ( k 3 ) \mathcal O(k^3) O(k3)。并且由于迭代过程中随着 θ \theta θ的变化,因而需要每次迭代过程都要计算对应 H − 1 \mathcal H^{-1} H−1。因而,最终结果是:只有少量参数的神经网络,才能在实际中使用牛顿法进行训练。
相关参考:
《深度学习》(花书)P190 - 8.6 二阶近似方法
相关文章:
牛顿法与正则化)
机器学习笔记之优化算法(十九)牛顿法与正则化
机器学习笔记之优化算法——再回首:牛顿法与正则化 引言回顾:经典牛顿法及其弊端牛顿法:算法步骤迭代过程中可能出现的问题正则化 Hessian Matrix \text{Hessian Matrix} Hessian Matrix与相应问题 引言 本节我们介绍经典牛顿法在训练神经网络过程中的迭…...

Java面试之单例模式的六种实现方式
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、为什么要用单例模式二、单例模式的六种实现2.1 饿汉式2.1.1 饿汉式代码实现2.1.2 饿汉式代码实现要点解析2.1.3 饿汉式代码实现优点2.1.4 饿汉式代码实现缺…...

re正则入门
🌸re正则入门 正则表达式 (Regular Expression) 又称 RegEx, 是用来匹配字符的一种工具. 在一大串字符中寻找你需要的内容. 它常被用在很多方面, 比如网页爬虫, 文稿整理, 数据筛选等等 简单的匹配 正则表达式无非就是在做这么一回事. 在文字中找到特定的内容, 比如…...

C++ Day5
目录 一、静态成员 1.1 概念 1.2 格式 1.3 银行账户实例 二、类的继承 2.1 目的 2.2 概念 2.3 格式 2.4 继承方式 2.5 继承中的特殊成员函数 2.5.1 构造函数 2.5.2析构函数 2.5.3 拷贝构造函数 2.5.4拷贝赋值函数 总结: 三、多继承 3.1 概念 3.2 格…...

el-element:自定义参数
希望在下拉框、输入框、多选框中添加自定义参数,这在项目中是非常常见的 1、 Select选择器中remote-method方法带自定义参数 :remote-method"(query)>{remoteMethod(query,自定义参数)}" remoteMethod(query, pid){ } 2、 el多选框方法追加参数&…...

“分布式”与“集群”初学者的技术总结
一、“分布式”与“集群”的解释: 分布式:把一个囊肿的系统分成无数个单独可运行的功能模块 集群: 把相同的项目复制进行多次部署(可以是一台服务器多次部署,例如使用8080部署一个,8081部署一个,…...
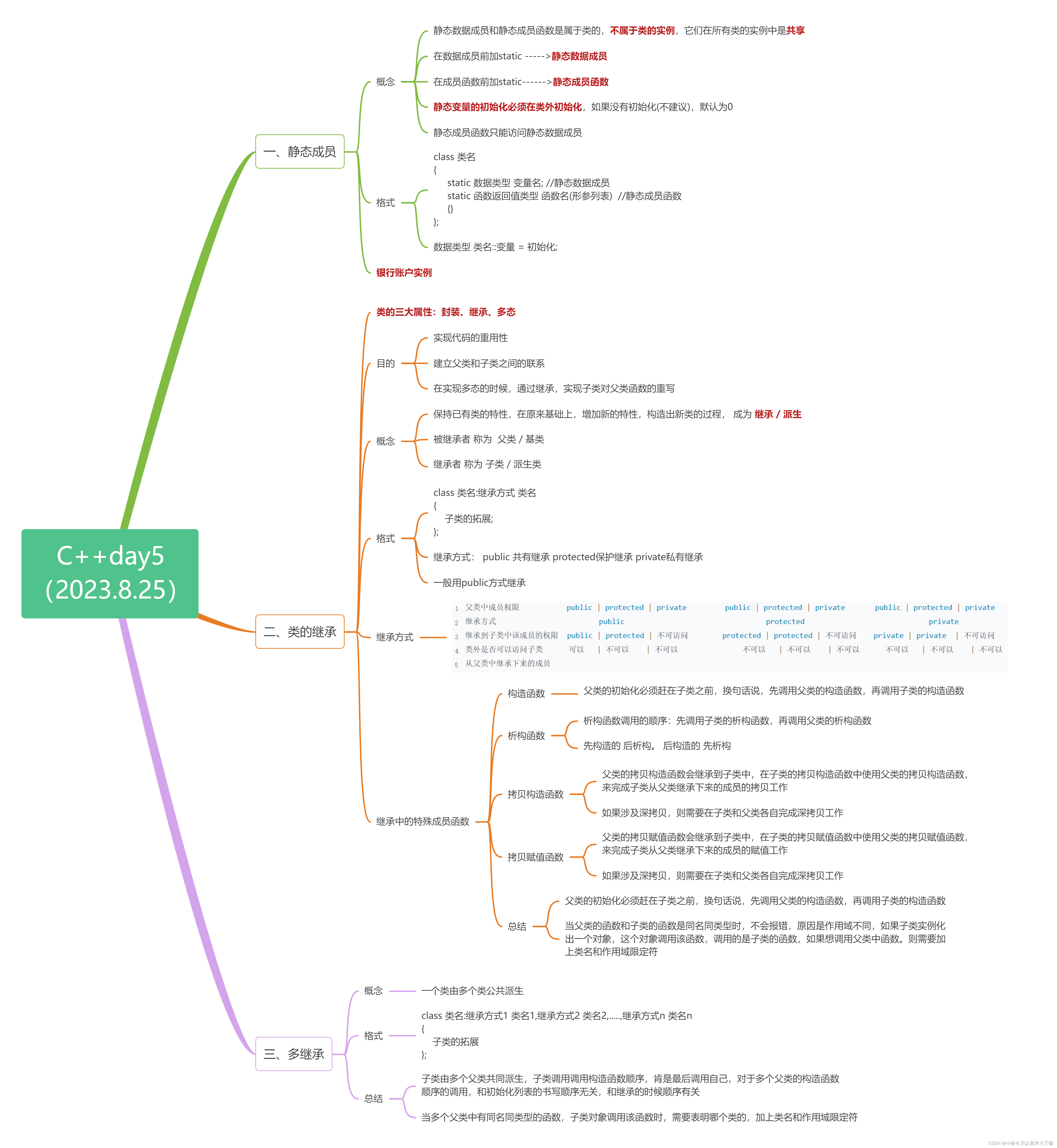
C++day5(静态成员、类的继承、多继承)
一、Xmind整理: 二、上课笔记整理: 1.静态数据成员静态成员函数(银行账户实例) #include <iostream>using namespace std;class BankAccount { private:double balance; //余额static double interest_rate; //利率 p…...
2023MySQL+MyBatis知识点整理
文章目录 主键 外键 的区别?什么是范式?什么是反范式?什么是事务?MySQL事务隔离级别?MySQL事务默认提交模式?MySQL中int(1)和int(10)的区别MySQL 浮点数会丢失精度吗?MySQL支持哪几种时间类型&a…...
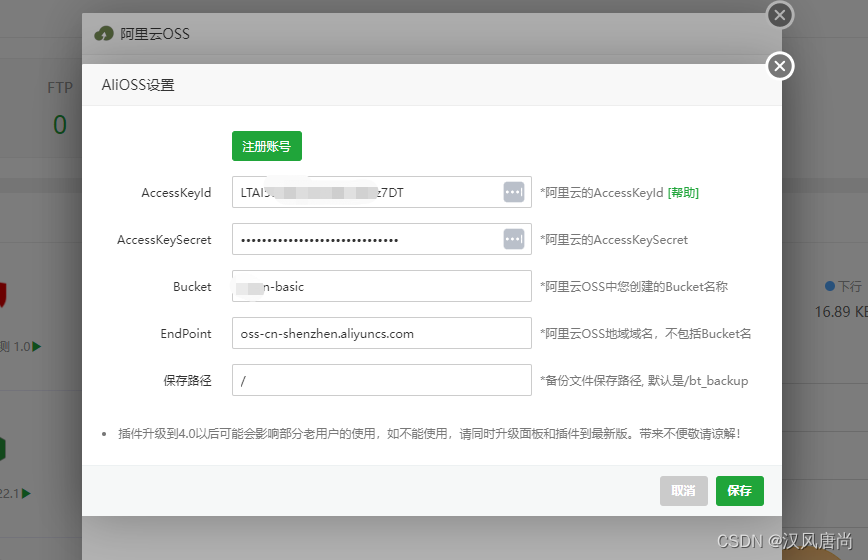
【随笔】如何使用阿里云的OSS保存基础的服务器环境
使用阿里云OSS创建一个存储仓库:bucket 在Linux上下载并安装阿里云的ossutil工具 // 命令行,是linux环境 3. 安装ossutil。sudo -v ; curl https://gosspublic.alicdn.com/ossutil/install.sh | sudo bash 说明:安装过程中,需要使用解压工具…...
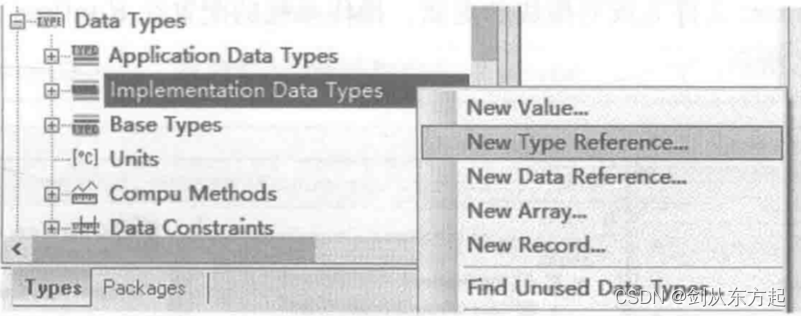
汽车电子笔记之:AUTOSA架构下的多核OS操作系统
目录 1、AUTOSAR多核操作系统 1.1、OS Application 1.2、多核OS的软件分区 1.3、任务调度 1.4、核间任务同步 1.5、计数器、报警器、调度表 1.6、自旋锁与共享资源 1.7、核间通信IOC 1.8、OS Object中元素交互 1.9、多核OS的启动与关闭 2、多核OS注意事项 2.1、最小…...
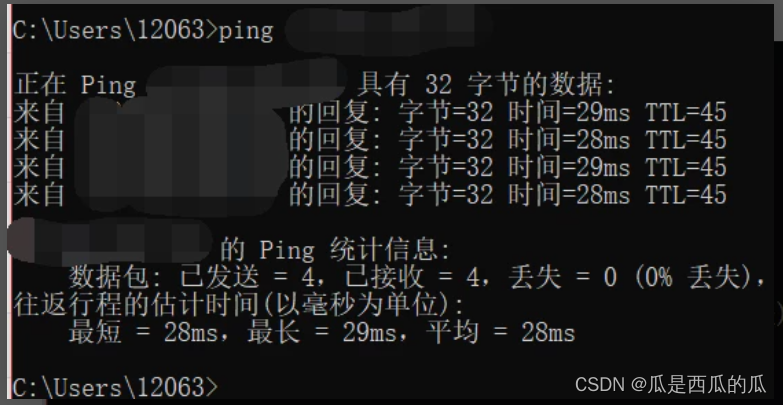
解决华为云ping不通的问题
进入华为云控制台。依次选择:云服务器->点击服务器id->安全组->更改安全组->添加入方向规则,添加一个安全组规则(ICMP),详见下图 再次ping公网ip就可以ping通了 产生这一问题的原因是ping的协议基于ICMP协…...
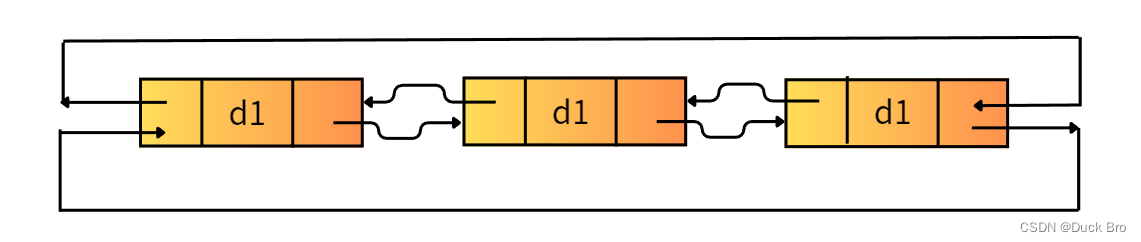
数据结构入门 — 链表详解_双向链表
前言 数据结构入门 — 双向链表详解* 博客主页链接:https://blog.csdn.net/m0_74014525 关注博主,后期持续更新系列文章 文章末尾有源码 *****感谢观看,希望对你有所帮助***** 系列文章 第一篇:数据结构入门 — 链表详解_单链表…...

时序预测 | MATLAB实现PSO-KELM粒子群算法优化核极限学习机时间序列预测(含KELM、ELM等对比)
时序预测 | MATLAB实现PSO-KELM粒子群算法优化核极限学习机时间序列预测(含KELM、ELM等对比) 目录 时序预测 | MATLAB实现PSO-KELM粒子群算法优化核极限学习机时间序列预测(含KELM、ELM等对比)预测效果基本介绍模型介绍程序设计参…...
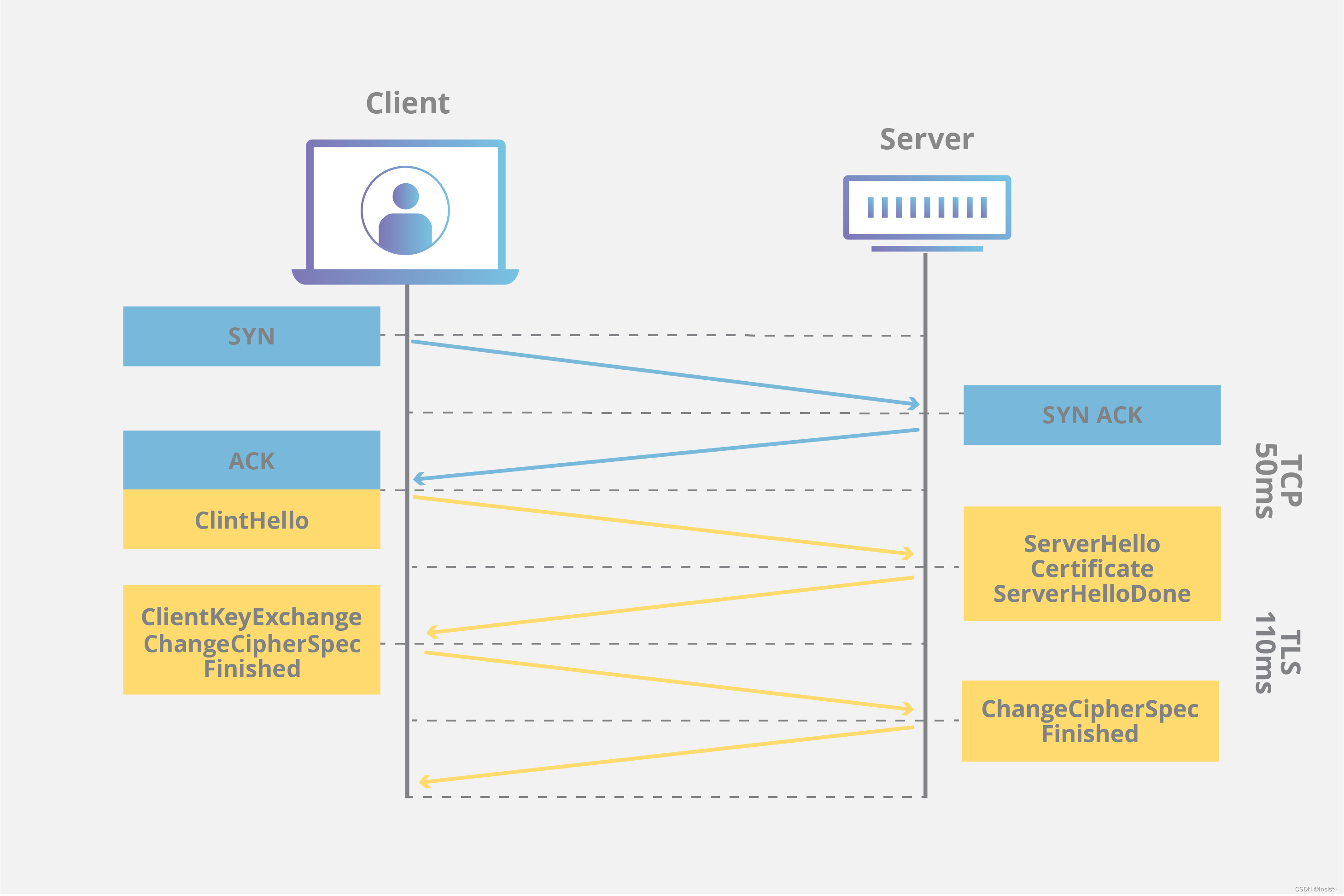
SSL/TLS协议的概念、工作原理、作用以及注意事项
个人主页:insist--个人主页 本文专栏:网络基础——带你走进网络世界 本专栏会持续更新网络基础知识,希望大家多多支持,让我们一起探索这个神奇而广阔的网络世界。 目录 一、SSL/TLS协议的基本概念 二、SSL/TLS的工作…...
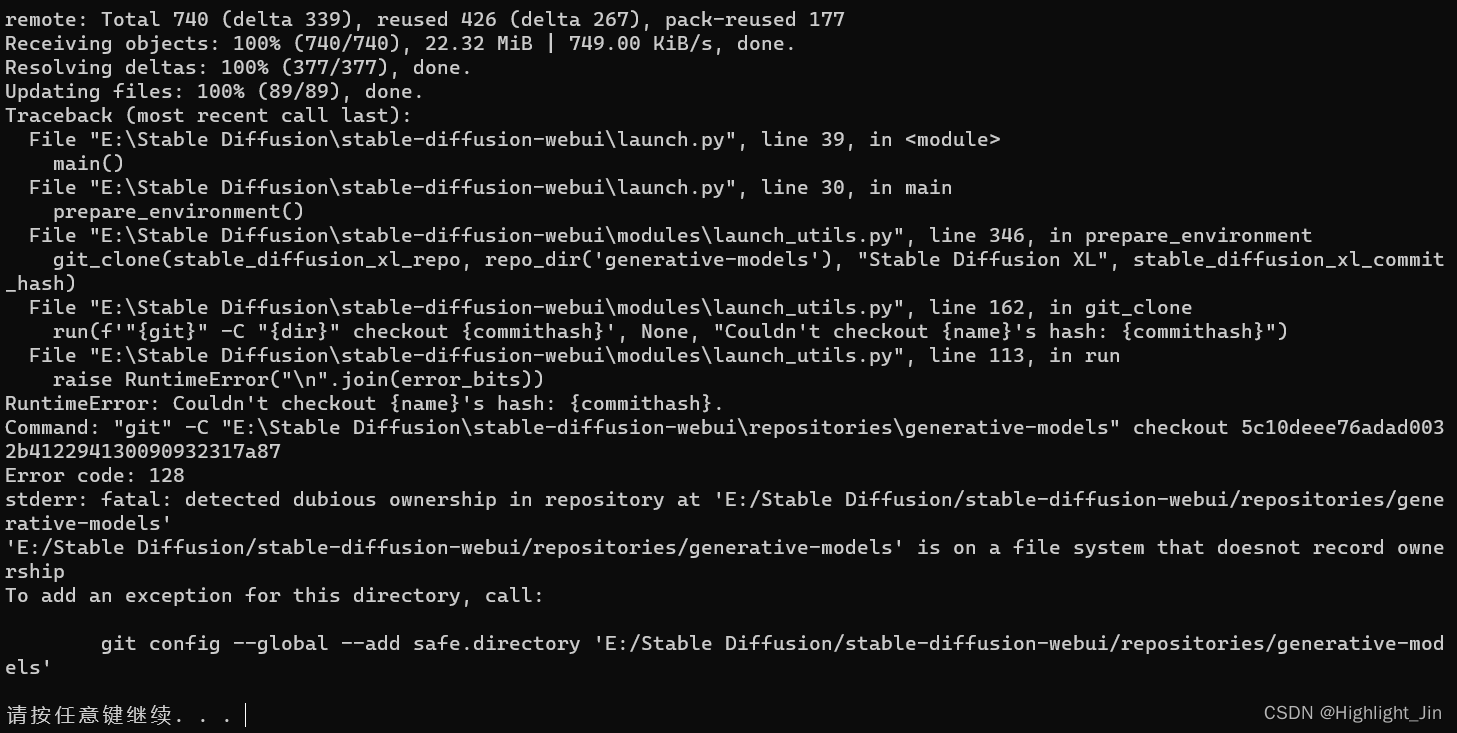
[Stable Diffusion教程] 第一课 原理解析+配置需求+应用安装+基本步骤
第一课 原理解析配置需求应用安装基本步骤 本次内容记录来源于B站的一个视频 以下是自己安装过程中整理的问题及解决方法: 问题:stable-diffusion-webui启动No Python at ‘C:\xxx\xxx\python.exe‘ 解答:打开webui.bat 把 if not de…...

uniapp结合Canvas+renderjs根据经纬度绘制轨迹(二)
uniapp结合Canvasrenderjs根据经纬度绘制轨迹 文章目录 uniapp结合Canvasrenderjs根据经纬度绘制轨迹效果图templaterenderjsjs数据结构 根据官方建议要想在 app-vue 流畅使用 Canvas 动画,需要使用 renderjs 技术,把操作canvas的js逻辑放到视图层运…...

VR全景加盟会遇到哪些问题?全景平台会提供什么?
想创业,你是否也遇到这些问题呢?我是外行怎么办?没有团队怎么办?项目回本周期快吗?项目靠谱吗?加盟平台可信吗?等等这类疑问。近几年,VR产业发展迅速,尤其是VR全景项目在…...

如何进行微服务的集成测试
集成测试的概念 说到集成测试,相信每个测试工程师并不陌生,它不是一个崭新的概念,通过维基百科定义可以知道它在传统软件测试中的含义。 Integration testing (sometimes called integration and testing, abbreviated I&T) is the pha…...

spark grpc 在master运行报错 exitcode13 User did not initialize spark context
程序使用sparksql 以及protobuf grpc ,执行报错 ApplicationMaster: Final app status: FAILED, exitCode: 13, (reason: Uncaught exception: java.lang.IllegalStateException: User did not initialize spark context! 先说原因 : 1.使用了不具备权限…...

nginx 反向代理的原理
Nginx(发音为"engine X")是一个高性能、轻量级的开源Web服务器和反向代理服务器。它的反向代理功能允许将客户端的请求转发到后端服务器,然后将后端服务器的响应返回给客户端。下面是Nginx反向代理的工作原理: 1.客户端…...

Ubuntu 22.04升级后,Chrome总提示‘连接中断’?别急着重装,试试检查这个代理设置
Ubuntu 22.04升级后Chrome连接中断的深度排查指南 最近不少Ubuntu 22.04用户在系统升级后遇到了一个令人困扰的问题——Chrome浏览器频繁提示"连接中断"。这个问题看似简单,实则可能隐藏着系统级网络配置变更的深层原因。本文将带你从多个维度全面排查&am…...

工业质检落地新思路:拆解SimpleNet如何用‘特征空间加噪’搞定缺陷检测
工业质检革命:SimpleNet如何用特征空间扰动突破小样本缺陷检测瓶颈 在PCB板生产线上,一个肉眼几乎不可见的焊点虚接可能导致整批产品报废;在汽车零部件装配车间,细微的划痕可能引发后续使用中的安全隐患。传统工业质检依赖人工目检…...
 == 1 的终极)
OpenCV报错解决:cornerSubPix断言失败 src.channels() == 1 的终极
一、 问题现象:令人头秃的 -215 断言错误 在进行相机标定、棋盘格角点提取或 Harris 角点优化时,很多开发者在调用 cv2.cornerSubPix 函数进行亚像素级精确定位时,经常会遇到如下崩溃报错: D:\a\opencv-python\opencv-python\open…...

2026届最火的六大AI辅助论文网站实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 人工智能技术飞速发展着,智能内容生成也就是AIGC,正一步步渗透到学术…...

如何在Windows电脑上直接运行安卓应用:APK安装器终极解决方案
如何在Windows电脑上直接运行安卓应用:APK安装器终极解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经希望在Windows电脑上直接运行安卓应…...
的显式与隐式设备管理对比)
PyTorch实战:多GPU环境下torch.cuda.set_device()的显式与隐式设备管理对比
1. 多GPU环境下的设备管理基础 当你在实验室或者公司服务器上看到多块GPU时,是不是既兴奋又有点无从下手?PyTorch为我们提供了多种方式来管理这些计算资源,但选择不当可能会带来意想不到的问题。让我们从一个实际场景开始:假设你正…...

TikTok 短视频生成工具哪家好?TikTok 爆款视频复刻,有什么工具推荐
在 TikTok 流量竞争愈发激烈的 2026 年,想要快速起号、稳定爆单,离不开优质短视频量产和爆款视频复刻。不用从零原创创作,借助成熟 AI 工具复刻平台热门爆款,已经成为跨境卖家和内容创作者的主流玩法。 不少人都在纠结两大问题&a…...

3大核心功能解密:如何用CSL编辑器告别引用格式噩梦
3大核心功能解密:如何用CSL编辑器告别引用格式噩梦 【免费下载链接】csl-editor cslEditorLib - A HTML 5 library for searching and editing CSL styles 项目地址: https://gitcode.com/gh_mirrors/csl/csl-editor 还在为论文引用格式而烦恼吗?…...

从API密钥管理角度感受Taotoken控制台的安全与便捷
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从API密钥管理角度感受Taotoken控制台的安全与便捷 作为项目或团队的技术负责人,管理多个大模型服务的API密钥是一项既…...

【亲测免费】 ADS1118驱动程序
ADS1118驱动程序 【下载地址】ADS1118驱动程序 本仓库提供了专用于ADS1118模数转换器(ADC)的驱动程序。ADS1118是一款高性能、高精度的16位模拟到数字转换器,广泛应用于需要精准测量的应用场景中,例如传感器数据采集系统、医疗设备…...