使用StorageClass动态创建pv
rook-ceph安装部署到位后,就可以开始来尝试使用StorageClass来动态创建pv了。
有状态的中间件在kubernetes上落地基本上都会用到StorageClass来动态创建pv(对于云上应用没有那么多烦恼,云硬盘很好用,但是对于自己学习和练习来说还是Ceph更加靠谱),这里小试一试动态创建pv的威力,为后续用它来玩转redis、zookeeper、elasticsearch做准备。
1、创建 StorageClass和存储池
kubectl create -f rook/deploy/examples/csi/rbd/storageclass.yaml查看创建的cephblockpool和StorageClass
kubectl get cephblockpool -n rook-ceph
kubectl get sc结果如下:

rook/deploy/examples/csi/rbd/storageclass.yaml内容如下:
apiVersion: ceph.rook.io/v1
kind: CephBlockPool
metadata:name: replicapoolnamespace: rook-ceph # namespace:cluster
spec:failureDomain: hostreplicated:size: 2# Disallow setting pool with replica 1, this could lead to data loss without recovery.# Make sure you're *ABSOLUTELY CERTAIN* that is what you wantrequireSafeReplicaSize: true# gives a hint (%) to Ceph in terms of expected consumption of the total cluster capacity of a given pool# for more info: https://docs.ceph.com/docs/master/rados/operations/placement-groups/#specifying-expected-pool-size#targetSizeRatio: .5
---
apiVersion: storage.k8s.io/v1
kind: StorageClass
metadata:name: rook-ceph-block
# Change "rook-ceph" provisioner prefix to match the operator namespace if needed
provisioner: rook-ceph.rbd.csi.ceph.com
parameters:# clusterID is the namespace where the rook cluster is running# If you change this namespace, also change the namespace below where the secret namespaces are definedclusterID: rook-ceph # namespace:cluster# If you want to use erasure coded pool with RBD, you need to create# two pools. one erasure coded and one replicated.# You need to specify the replicated pool here in the `pool` parameter, it is# used for the metadata of the images.# The erasure coded pool must be set as the `dataPool` parameter below.#dataPool: ec-data-poolpool: replicapool# (optional) mapOptions is a comma-separated list of map options.# For krbd options refer# https://docs.ceph.com/docs/master/man/8/rbd/#kernel-rbd-krbd-options# For nbd options refer# https://docs.ceph.com/docs/master/man/8/rbd-nbd/#options# mapOptions: lock_on_read,queue_depth=1024# (optional) unmapOptions is a comma-separated list of unmap options.# For krbd options refer# https://docs.ceph.com/docs/master/man/8/rbd/#kernel-rbd-krbd-options# For nbd options refer# https://docs.ceph.com/docs/master/man/8/rbd-nbd/#options# unmapOptions: force# (optional) Set it to true to encrypt each volume with encryption keys# from a key management system (KMS)# encrypted: "true"# (optional) Use external key management system (KMS) for encryption key by# specifying a unique ID matching a KMS ConfigMap. The ID is only used for# correlation to configmap entry.# encryptionKMSID: <kms-config-id># RBD image format. Defaults to "2".imageFormat: "2"# RBD image features# Available for imageFormat: "2". Older releases of CSI RBD# support only the `layering` feature. The Linux kernel (KRBD) supports the# full complement of features as of 5.4# `layering` alone corresponds to Ceph's bitfield value of "2" ;# `layering` + `fast-diff` + `object-map` + `deep-flatten` + `exclusive-lock` together# correspond to Ceph's OR'd bitfield value of "63". Here we use# a symbolic, comma-separated format:# For 5.4 or later kernels:#imageFeatures: layering,fast-diff,object-map,deep-flatten,exclusive-lock# For 5.3 or earlier kernels:imageFeatures: layering# The secrets contain Ceph admin credentials. These are generated automatically by the operator# in the same namespace as the cluster.csi.storage.k8s.io/provisioner-secret-name: rook-csi-rbd-provisionercsi.storage.k8s.io/provisioner-secret-namespace: rook-ceph # namespace:clustercsi.storage.k8s.io/controller-expand-secret-name: rook-csi-rbd-provisionercsi.storage.k8s.io/controller-expand-secret-namespace: rook-ceph # namespace:clustercsi.storage.k8s.io/node-stage-secret-name: rook-csi-rbd-nodecsi.storage.k8s.io/node-stage-secret-namespace: rook-ceph # namespace:cluster# Specify the filesystem type of the volume. If not specified, csi-provisioner# will set default as `ext4`. Note that `xfs` is not recommended due to potential deadlock# in hyperconverged settings where the volume is mounted on the same node as the osds.csi.storage.k8s.io/fstype: ext4
# uncomment the following to use rbd-nbd as mounter on supported nodes
# **IMPORTANT**: CephCSI v3.4.0 onwards a volume healer functionality is added to reattach
# the PVC to application pod if nodeplugin pod restart.
# Its still in Alpha support. Therefore, this option is not recommended for production use.
#mounter: rbd-nbd
allowVolumeExpansion: true
reclaimPolicy: Delete2、创nginx的StatefulSet,通过storageclass来动态创建pv绑定到 /usr/share/nginx/html 有状态的Pod,每个Pod都要有自己的pv。 对于redis、zookeeper、elasticsearch来说都会使用到storageClass来动态创建pv。
kubectl apply -f test_volumnClainTemplates.yaml 查看命令如下:
kubectl get po -l app=nginx
kubectl get pvc结果如下:

test_volumnClainTemplates.yaml的内容如下:
apiVersion: v1
kind: Service
metadata:name: nginxlabels:app: nginx
spec:ports:- port: 80name: webclusterIP: Noneselector:app: nginx
---
apiVersion: apps/v1
kind: StatefulSet
metadata:name: web
spec:selector:matchLabels:app: nginxserviceName: "nginx"replicas: 2 template:metadata: labels:app: nginxspec:terminationGracePeriodSeconds: 10 containers:- name: nginx image: nginx ports:- containerPort: 80 name: webvolumeMounts:- name: wwwmountPath: /usr/share/nginx/htmlvolumeClaimTemplates:- metadata:name: www spec:accessModes: [ "ReadWriteOnce" ] storageClassName: "rook-ceph-block"resources:requests:storage: 200M
相关文章:
使用StorageClass动态创建pv
rook-ceph安装部署到位后,就可以开始来尝试使用StorageClass来动态创建pv了。 有状态的中间件在kubernetes上落地基本上都会用到StorageClass来动态创建pv(对于云上应用没有那么多烦恼,云硬盘很好用,但是对于自己学习和练习来说还…...
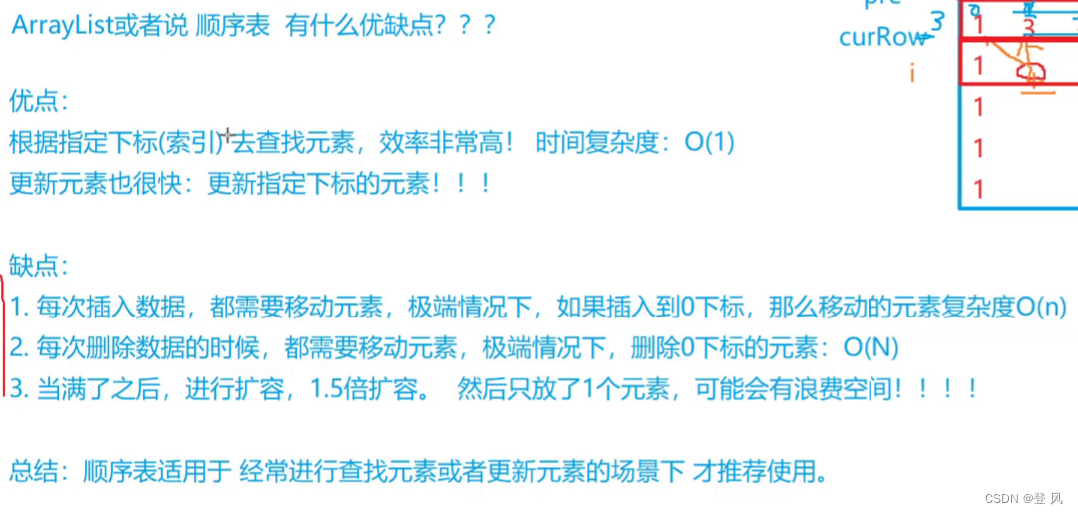
数据结构(Java实现)-ArrayList与顺序表
什么是List List是一个接口,继承自Collection。 List的使用 List是个接口,并不能直接用来实例化。 如果要使用,必须去实例化List的实现类。在集合框架中,ArrayList和LinkedList都实现了List接口。 线性表 线性表(lin…...

性能优化维度
CPU 首先检查 cpu,cpu 使用率要提升而不是降低。其次CPU 空闲并不一定是没事做,也有可能是锁或者外部资源瓶颈。常用top、vmstat命令查看信息。 vmstat 命令: top: 命令 IO iostat 命令: Memory free 命令: 温馨提示:…...

【C++】map的奇葩用法:和函数结合
2023年8月26日,周六下午 今天才发现map居然还能这样用... #include <iostream> #include <map> #include <functional>void printOne() {std::cout << "已经打印出1" << std::endl; }void printTwo() {std::cout <<…...

关于JVM的参数类型
JVM参数类型,主要是可以分为三类。分别是: 标准参数 例如: -help-server-client-version-showversion-cp-classpath 等等,这类参数的特点是在jdk各版本里基本不会变的,相对稳定。 X参数 X参数也就是非标准化参数&am…...

HTTP协议中的Content-Type及其常见类型
什么是Content-Type? Content-Type是HTTP协议中的一个头部字段,用于指示请求或响应中所传输的实体的媒体类型。 为什么使用Content-Type? 使用Content-Type可以告知接收方如何解析和处理传输的数据,确保数据能够正确地被解析和…...
android Junit4编写自测用例
10多年的android开发经验,一直以来呢,也没有使用过android自带的测试代码编写。说来也惭愧。今天也花了点时间稍微研究了下。还挺简单。接下来就简单的说一下。 新建工程 直接默认新建一个工程,就会有两个目录androidTest和test(unitTest)两…...
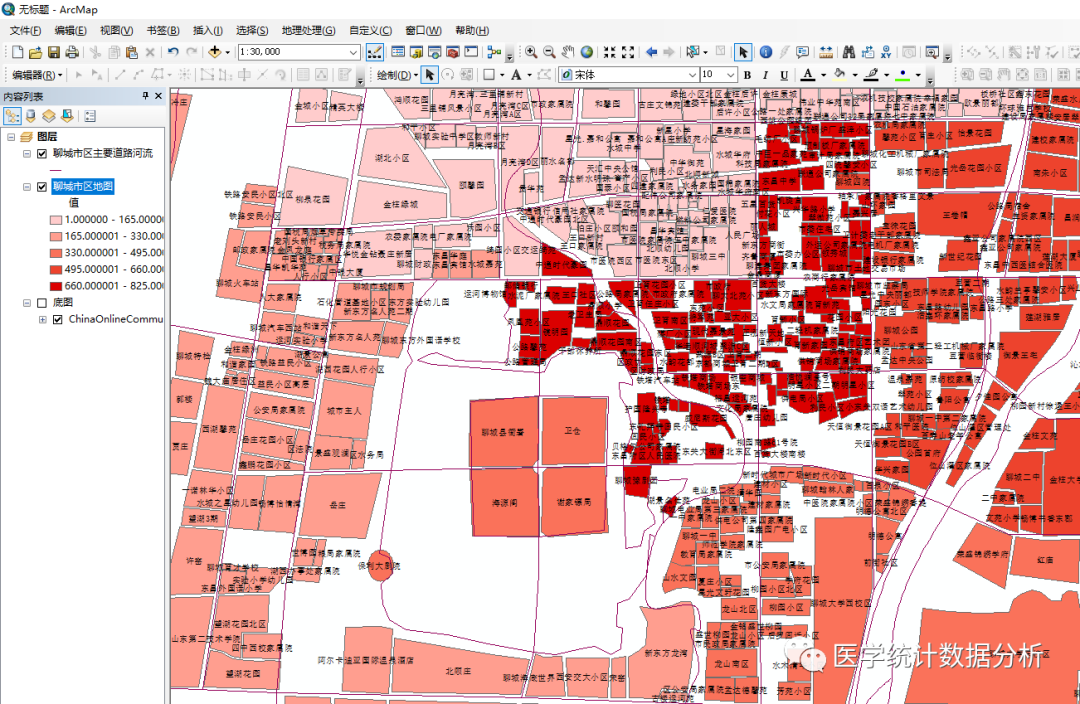
arcgis:画一幅自己城市的shp地图
首先打开ArcGis10.6,点击带黄底的小加号,添加底图。 可以选择中国地图彩色版,然后双击,转动鼠标滑轮找到属于自己的城市。 点击-目录,在新建的文件夹里右击-新建-shapefile。 格式选择折线,先把主要河流道路…...

采购油封时要考虑的因素
对于依赖机械和设备的行业来说,油封的选择是一个关键的决定,以确保平稳运行并防止流体泄漏。由于有多种选择,了解购买油封时要考虑的关键因素对于确保适合特定应用至关重要。让我们深入研究一下在此选择过程中发挥关键作用的考虑因素。 1、运…...

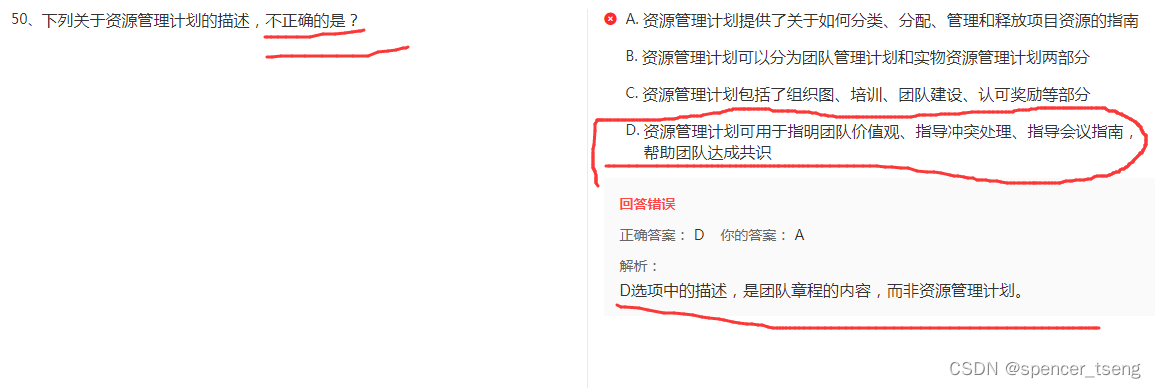
【无标题】科目一笔记
载人超过核定人数 校车/公路客运汽车/旅游客运汽车 未达到20%,-6超过20%以上,-12 七座以上载客汽车 1. 超过20%以上未达到50%,-6 2. 超过50%以上未达到100%,-9 其他载客汽车 1. 超过20%以上未达到50%,-3 2. 超过50…...
java八股文面试[数据结构]——HashMap和HashTable区别
HashMap源码中的重要常量 DEFAULT_INITIAL_CAPACITY: HashMap的默认容量,16 MAXIMUM_CAPACITY: HashMap的最大支持容量,2^30 TREEIFY_THRESHOLD:Bucket中链表长度大于该默认值,转化为红黑树。 UNTREEIFY_THRESHOLD…...

乐趣无限:10款基于Pygame的经典游戏合集
引言 游戏开发一直是许多程序员和游戏爱好者追求的梦想。而Pygame作为一款功能强大的游戏开发库,为我们提供了实现各种有趣游戏的工具和接口。在本文中,我将向大家介绍10款基于Pygame的经典游戏合集,从简单的猜数字到刺激的飞机…...

php检测数组是否存在某个键,和是否存在某个变量
一、array_key_exists() array_key_exists() 是一个 PHP 内置的函数,用于判断数组中是否存在指定的键。该函数接收两个参数,第一个是键名,第二个是数组。 $arr array(name > Jack, age > 20, country > China);if (array_key_exi…...

c++中的const与constexpt的区别
c中的const与constexpr的区别 const const 是一种修饰符,用于声明一个只读的常量。它可以用于变量、函数参数和函数返回类型。声明为 const 的变量的值在初始化后就不能再改变。 适用场景: const 适用于声明运行时常量,在编译时无法确定值…...
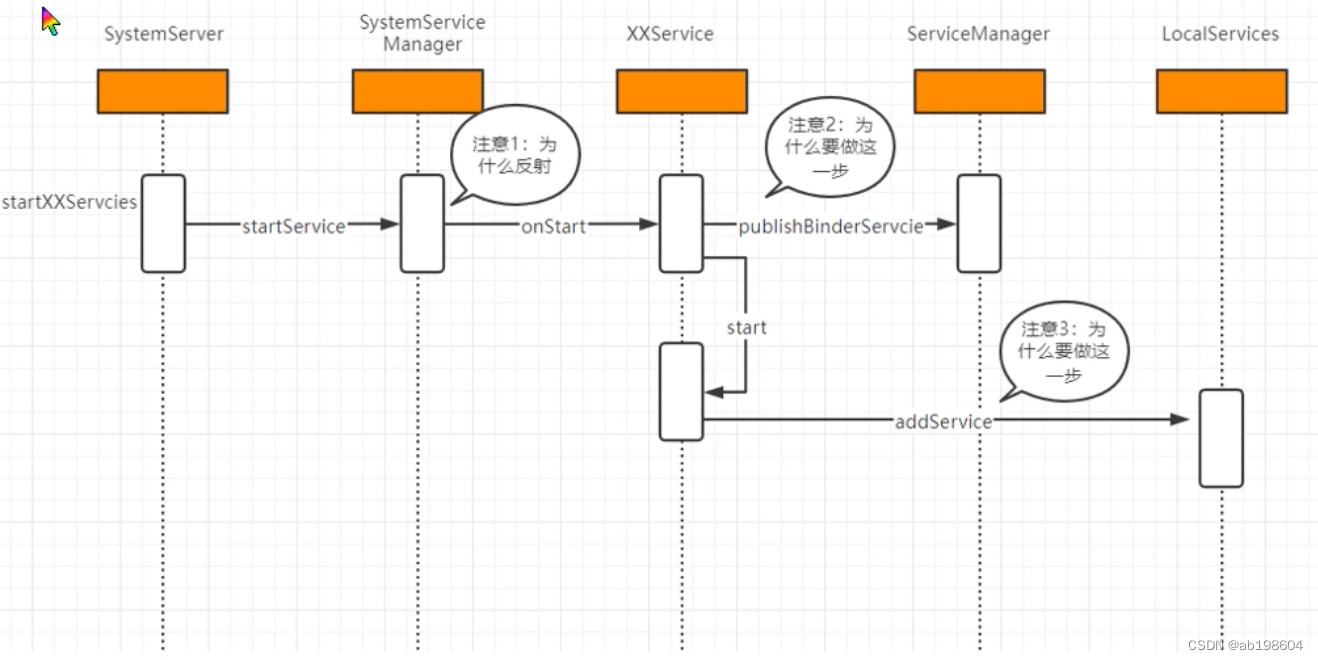
android系统启动流程之SystemServer运行过程
SystemServer进程的启动流程:直接看代码: SystemServer是Java中的一个进程,执行入口是SystemServer.java.main(); SystemServer.java.main();-->new SystemServer().run();-->createSystemContext();//创建系统上下文:虽然SystemServe…...
Leetcode 1812。判断国际象棋棋盘中一个格子的颜色
国际棋盘问题: 给你一个坐标 coordinates ,它是一个字符串,表示国际象棋棋盘中一个格子的坐标。下图是国际象棋棋盘示意图。 如果所给格子的颜色是白色,请你返回 true,如果是黑色,请返回 false 。 给定坐标…...
9个python自动化脚本,PPT批量生成缩略图、添加图片、重命名
引言 最近一番在整理资料,之前买的PPT资源很大很多,但归类并不好,于是一番准备把这些PPT资源重新整理一下。统计了下,这些PPT资源大概有2000多个,一共30多G,一个一个手动整理这个投入产出比也太低了。 作为…...
计算机竞赛 基于大数据的社交平台数据爬虫舆情分析可视化系统
文章目录 0 前言1 课题背景2 实现效果**实现功能****可视化统计****web模块界面展示**3 LDA模型 4 情感分析方法**预处理**特征提取特征选择分类器选择实验 5 部分核心代码6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于大数据…...

基于Java的旅游信息推荐系统设计与实现,springboot+vue,MySQL数据库,前后端分离,完美运行,有三万字论文。
基于Java的旅游信息推荐系统设计与实现,springbootvue,MySQL数据库,前后端分离,完美运行,有三万字论文。 前台主要功能:登录注册、旅游新闻、景区信息、美食信息、旅游线路、现在留言、收藏、预定旅游线路…...

如何快速诊断dynamic-datasource JVM线程问题:JStack实战指南
如何快速诊断dynamic-datasource JVM线程问题:JStack实战指南 【免费下载链接】dynamic-datasource dynamic datasource for springboot 多数据源 动态数据源 主从分离 读写分离 分布式事务 项目地址: https://gitcode.com/gh_mirrors/dy/dynamic-datasource …...

PasteMD场景应用:微信聊天记录自动整理为会议纪要
PasteMD场景应用:微信聊天记录自动整理为会议纪要 1. 为什么你的会议纪要总是一团糟? 想象一下这个场景: 下午两点,项目组紧急拉了个微信群聊,大家七嘴八舌讨论了半小时,敲定了五个关键事项和三个责任人。…...

OpenClaw+Qwen3.5-4B-Claude-4.6-Opus-Reasoning-Distilled-GGUF:3个低成本自动化场景实测
OpenClawQwen3.5-4B-Claude-4.6-Opus-Reasoning-Distilled-GGUF:3个低成本自动化场景实测 1. 为什么选择这个组合? 上个月在折腾个人自动化工作流时,我遇到了一个典型矛盾:既希望AI能处理复杂的代码和文档任务,又受限…...

墨语灵犀镜像灰度发布:Kubernetes滚动更新无感升级实践
墨语灵犀镜像灰度发布:Kubernetes滚动更新无感升级实践 1. 引言:优雅升级的艺术挑战 在现代应用部署中,如何实现平滑无感的服务升级一直是个技术难题。特别是对于「墨语灵犀」这样注重用户体验的深度翻译工具,任何服务中断或体验…...
)
手把手教你搞定VMware VCP-DCV 2024线下考试预约(附北上广考位抢票攻略)
2024年VMware VCP-DCV认证考试抢位全攻略:一线城市实战技巧 凌晨三点,北京中关村某科技公司的运维工程师小李又一次刷新了Pearson VUE页面——这已经是他连续第七天蹲守VCP-DCV 2024的考位。作为晋升技术主管的硬性条件,这张认证对他来说价值…...
)
TwinCAT界面美化指南:3步搞定背景主题切换(附最佳配色方案推荐)
TwinCAT界面美化实战:从主题定制到高效编程的视觉优化 每次打开TwinCAT开发环境,是否觉得默认的灰白色调让人昏昏欲睡?作为工业自动化领域的核心开发工具,TwinCAT的界面美学长期被工程师们忽视。实际上,一个精心调校的…...

OmenSuperHub:解锁惠普游戏本隐藏性能的开源控制方案
OmenSuperHub:解锁惠普游戏本隐藏性能的开源控制方案 【免费下载链接】OmenSuperHub 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 你是否厌倦了官方Omen Gaming Hub的臃肿体验?想要一个纯净、高效的硬件控制工具来释放你的惠普游…...

Mac Mouse Fix技术深度解析:从底层事件处理到高级鼠标功能增强的架构演进
Mac Mouse Fix技术深度解析:从底层事件处理到高级鼠标功能增强的架构演进 【免费下载链接】mac-mouse-fix Mac Mouse Fix - A simple way to make your mouse better. 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix Mac Mouse Fix是一款革…...

指针的使用
指针基本用法C语言中使用指针可以1.程序简洁,紧凑,高效2.有效的表达复杂的数据结构3.动态分配内存4.得到多余一个的函数返回值5.编译或函数调用时为其分配内存单元6.变量是对程序中数据存储空间的抽象指针的感念在C语言中,内存单元的地址&…...

如何用Alternative Mod Launcher彻底解决XCOM 2模组管理的五大难题
如何用Alternative Mod Launcher彻底解决XCOM 2模组管理的五大难题 【免费下载链接】xcom2-launcher The Alternative Mod Launcher (AML) is a replacement for the default game launchers from XCOM 2 and XCOM Chimera Squad. 项目地址: https://gitcode.com/gh_mirrors/…...