【TI毫米波雷达笔记】UART串口外设配置及驱动(以IWR6843AOP为例)
【TI毫米波雷达笔记】UART串口外设初始化配置及驱动(以IWR6843AOP为例)
最基本的工程建立好以后
需要给SOC进行初始化配置
int main (void)
{//刷一下内存memset ((void *)L3_RAM_Buf, 0, sizeof(L3_RAM_Buf));int32_t errCode; //存放SOC初始化错误代码SOC_Cfg socCfg; //SOC配置结构体Task_Params taskParams; //任务参数SOC_Handle socHandle;ESM_init(0U); //与安全等有关,可略过/* Initialize the SOC configuration: *//* 初始化SOC配置结构体 */memset ((void *)&socCfg, 0, sizeof(SOC_Cfg));memset((void *)&MMWave_Global_Params,0,sizeof(MMWave_Global));/* 配置SOC配置结构体 *//* Populate the SOC configuration: */socCfg.clockCfg = SOC_SysClock_INIT;socCfg.mpuCfg = SOC_MPUCfg_CONFIG;/* require to UNHALT the DSS if this core is available in selected device */socCfg.dssCfg = SOC_DSSCfg_UNHALT;/* Initialize the SOC Module: This is done as soon as the application is started* to ensure that the MPU is correctly configured. *//* SOC初始化,必须在系统运行后尽快调用该初始化函数 */socHandle = SOC_init (&socCfg, &errCode);if (socHandle == NULL){System_printf ("Error: SOC Module Initialization failed [Error code %d]\n", errCode);return -1;}/* Wait for BSS powerup */if (SOC_waitBSSPowerUp(socHandle, &errCode) < 0){/* Debug Message: */System_printf ("Debug: SOC_waitBSSPowerUp failed with Error [%d]\n", errCode);return 0;}/* Check if the SOC is a secure device */if (SOC_isSecureDevice(socHandle, &errCode)){/* Disable firewall for JTAG and LOGGER (UART) which is needed by all unit tests */SOC_controlSecureFirewall(socHandle,(uint32_t)(SOC_SECURE_FIREWALL_JTAG | SOC_SECURE_FIREWALL_LOGGER),SOC_SECURE_FIREWALL_DISABLE,&errCode);}MMWave_Global_Params.handle.socHandle = socHandle;/* Debug Message: */System_printf ("Debug: Launching the MMW HWA Demo\n");/* Initialize the Task Parameters. *//* 创建一个任务用于测试 */Task_Params_init(&taskParams);//taskParams.priority = 3; //优先级3MMWave_Global_Params.task.init = Task_create(MMWave_InitTask, &taskParams, NULL);/* Start BIOS */BIOS_start();return 0;
}最是基础配置模板
包含了时钟 MPC DSS BSS上电等等
初始化后 调用GPIO和UART初始化
GPIO_init(); //GPIO初始化UART_init(); //串口初始化
同时进行引脚复用配置:
void Init_Pinmux(void)
{/* 串口引脚初始化 *//* 共有两个串口,分别为UART-1和UART-3,序号为0和2 *//* Setup the PINMUX to bring out the MSS UART-1 */Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINN5_PADBE, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINN5_PADBE, SOC_XWR68XX_PINN5_PADBE_MSS_UARTA_TX);Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINN4_PADBD, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINN4_PADBD, SOC_XWR68XX_PINN4_PADBD_MSS_UARTA_RX);// 这一块用不上/* Setup the PINMUX to bring out the MSS UART-3 */
// Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINF14_PADAJ, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
// Pinmux_Set_FuncSel(SOC_XWR68XX_PINF14_PADAJ, SOC_XWR68XX_PINF14_PADAJ_MSS_UARTB_TX);/*********************************************************************** Setup the PINMUX:* - for QSPI Flash**********************************************************************/Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINR12_PADAP, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINR12_PADAP, SOC_XWR68XX_PINR12_PADAP_QSPI_CLK);Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINP11_PADAQ, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINP11_PADAQ, SOC_XWR68XX_PINP11_PADAQ_QSPI_CSN);Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINR13_PADAL, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINR13_PADAL, SOC_XWR68XX_PINR13_PADAL_QSPI_D0);Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINN12_PADAM, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINN12_PADAM, SOC_XWR68XX_PINN12_PADAM_QSPI_D1);Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINR14_PADAN, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINR14_PADAN, SOC_XWR68XX_PINR14_PADAN_QSPI_D2);Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINP12_PADAO, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);Pinmux_Set_FuncSel(SOC_XWR68XX_PINP12_PADAO, SOC_XWR68XX_PINP12_PADAO_QSPI_D3);
}我这里只用了一个串口 引脚为:
SOC_XWR68XX_PINN4_PADBD和SOC_XWR68XX_PINN4_PADBD
在手册上可以查到:
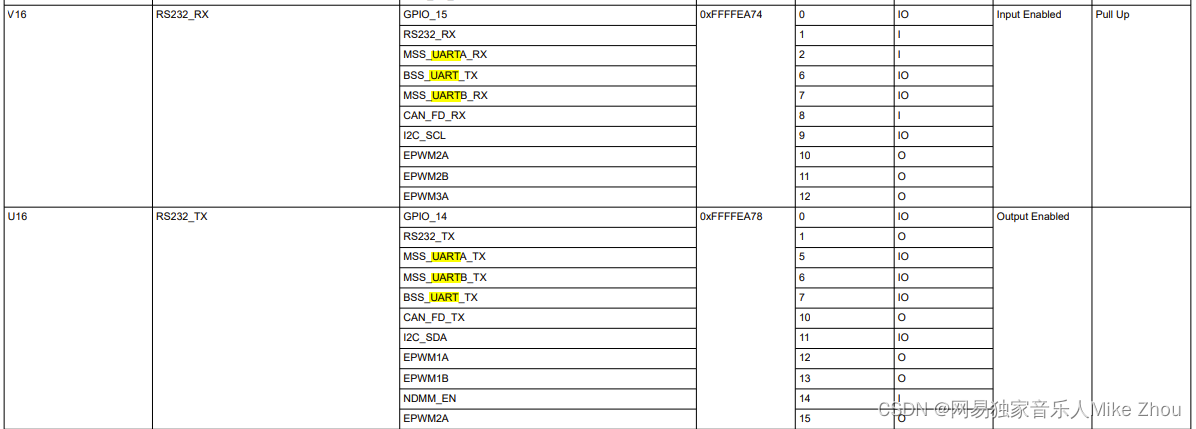
之后就是UART串口配置以及串口测试:
void Init_UART(void)
{UART_Params uart0_params;UART_Params_init(&uart0_params);uart0_params.baudRate = 115200; //波特率115200*8uart0_params.clockFrequency = MSS_SYS_VCLK; //系统时钟频率200MHzuart0_params.dataLength = UART_LEN_8; //8bit字长uart0_params.isPinMuxDone = 1; //已经完成引脚复用初始化uart0_params.parityType = UART_PAR_NONE; //无校验位uart0_params.readDataMode = UART_DATA_BINARY; //按位方式读取数据uart0_params.readEcho = UART_ECHO_OFF; //关闭回显uart0_params.readReturnMode = UART_RETURN_FULL; //完整读取uart0_params.stopBits = UART_STOP_ONE; //1停止位uart0_params.writeDataMode = UART_DATA_BINARY; //按位方式写入(发送)数据MMWave_Global_Params.handle.uart0_handle = UART_open(0, &uart0_params); //打开串口if(MMWave_Global_Params.handle.uart0_handle == NULL){System_printf("UART0 open fail\n!");return;}System_printf("UART0 open success\n!");uint8_t buf[]="[INFO] UART0 Test\n";UART_write(MMWave_Global_Params.handle.uart0_handle, buf, sizeof(buf));
}在串口终端上面可以看到串口输出
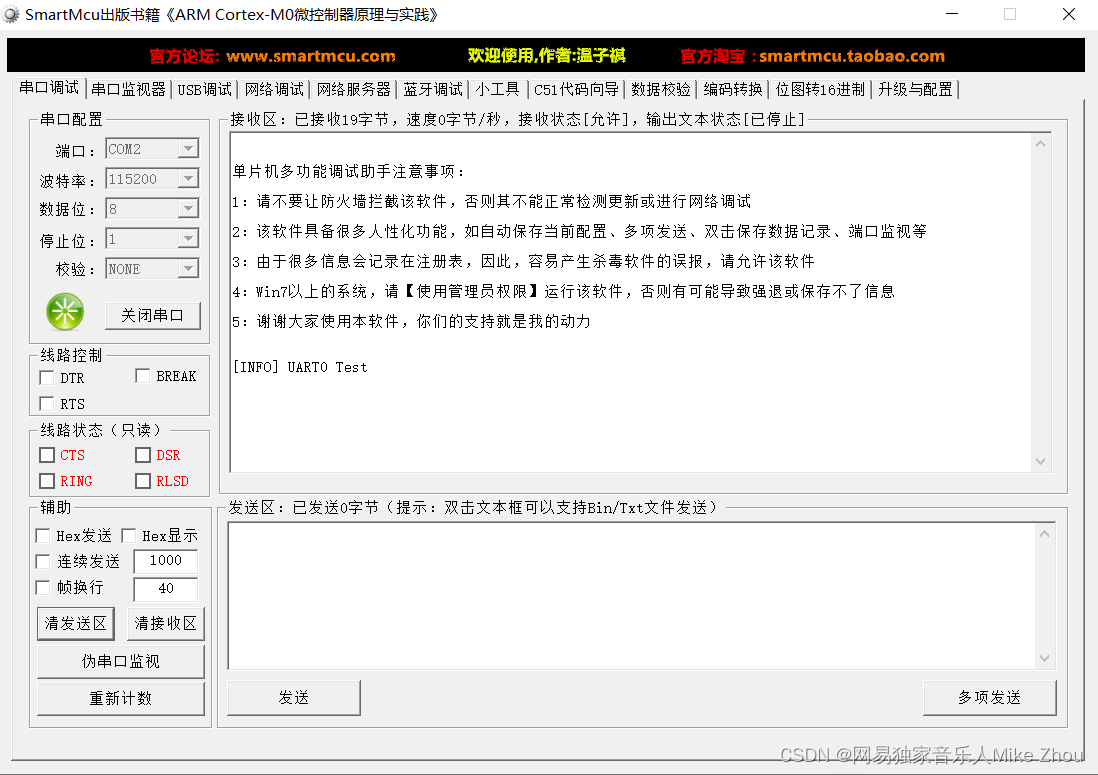
串口回环:
while(1)
{//不断读取收到的数据,并通过串口发送出去//该函数会使进程进入挂起等待状态,不会使其他任务无法执行//可以发现打印任务也可以执行UART_read(handle, &dat, 1);UART_write(handle, &dat, 1);}
相关文章:
【TI毫米波雷达笔记】UART串口外设配置及驱动(以IWR6843AOP为例)
【TI毫米波雷达笔记】UART串口外设初始化配置及驱动(以IWR6843AOP为例) 最基本的工程建立好以后 需要给SOC进行初始化配置 int main (void) {//刷一下内存memset ((void *)L3_RAM_Buf, 0, sizeof(L3_RAM_Buf));int32_t errCode; //存放SOC初…...
C#---第十九课:不同类型方法的执行顺序(new / virtual / common / override)
本文介绍不同类型的方法,在代码中的执行顺序问题: 构造方法普通方法(暂用common代替)、虚方法(Virtual修饰)、New方法(new修饰)三个优先级相同overide方法(会替换virtual…...

[pytorch]torch.cuda用法以及判断显卡是不是存在问题
常见用法: torch.cuda.is_available() # 查看是否有可用GPU torch.cuda.device_count() # 查看GPU数量 torch.cuda.get_device_capability(device) # 查看指定GPU容量 torch.cuda.get_device_name(device) # 查看指定GPU名称 torch.cuda.empty_cache() # 清空程序占…...
JUC——多线程补充
前置可看 Java——多线程和锁_java多线程锁_北岭山脚鼠鼠的博客-CSDN博客 线程创建的三种方式 Thread、Runnable、Callable Thread类 Runable接口 Callable接口 Lamda表达式 Lamda表达式_北岭山脚鼠鼠的博客-CSDN博客 静态代理模式(Thread类的原理) 如下代码中 真实对象…...
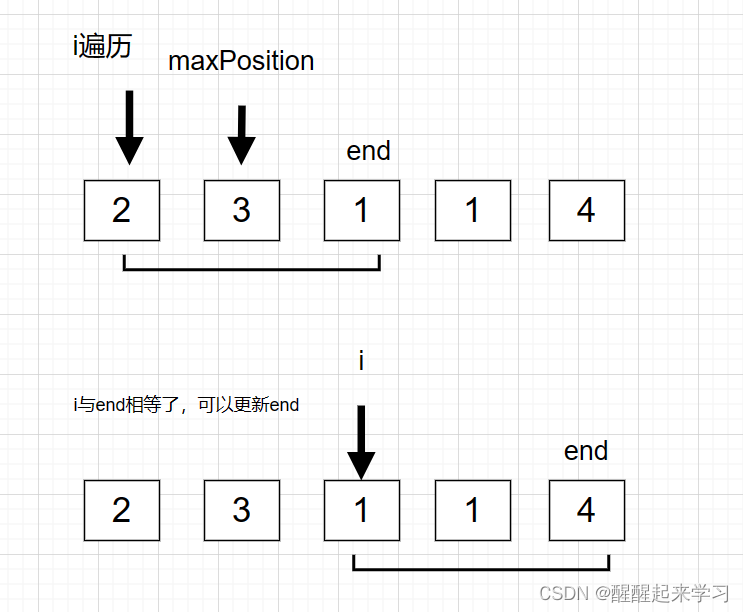
代码随想录第32天|122.买卖股票的最佳时机 II,55. 跳跃游戏 ,45. 跳跃游戏 II
122.买卖股票的最佳时机 II 122. 买卖股票的最佳时机 II 思路比较简单 class Solution {public int maxProfit(int[] prices) {int res0,sum0;for(int i0;i<prices.length-1;i){if(prices[i1]-prices[i]>0){sumprices[i1]-prices[i];}ressum>res?sum:res;}return …...

Linux:Nginx服务与搭建
目录 一、Nginx概述 二、Nginx三大作用:反向代理、负载均衡、动静分离 三、Nginx和Apache 3.1Nginx和Apache的差异 3.2Nginx和Apache的优缺点比较 四、编译安装niginx 五、创建Nginx 自启动文件 六、Nginx的信号使用 6.1信号 七、升级 nginx1.18 nginx1.2…...

4、什么是NoSQL
4、什么是NoSQL NoSQL NoSQL Not Only SQL,就是不仅仅是SQL的意思 泛指非关系型数据库,随着web2.0的诞生!传统的关系型数据库很难对付web2.0时代,因为web2.0时代又很多数据大爆炸新生的产物比如视频、音乐、大数据产生的其他的数…...
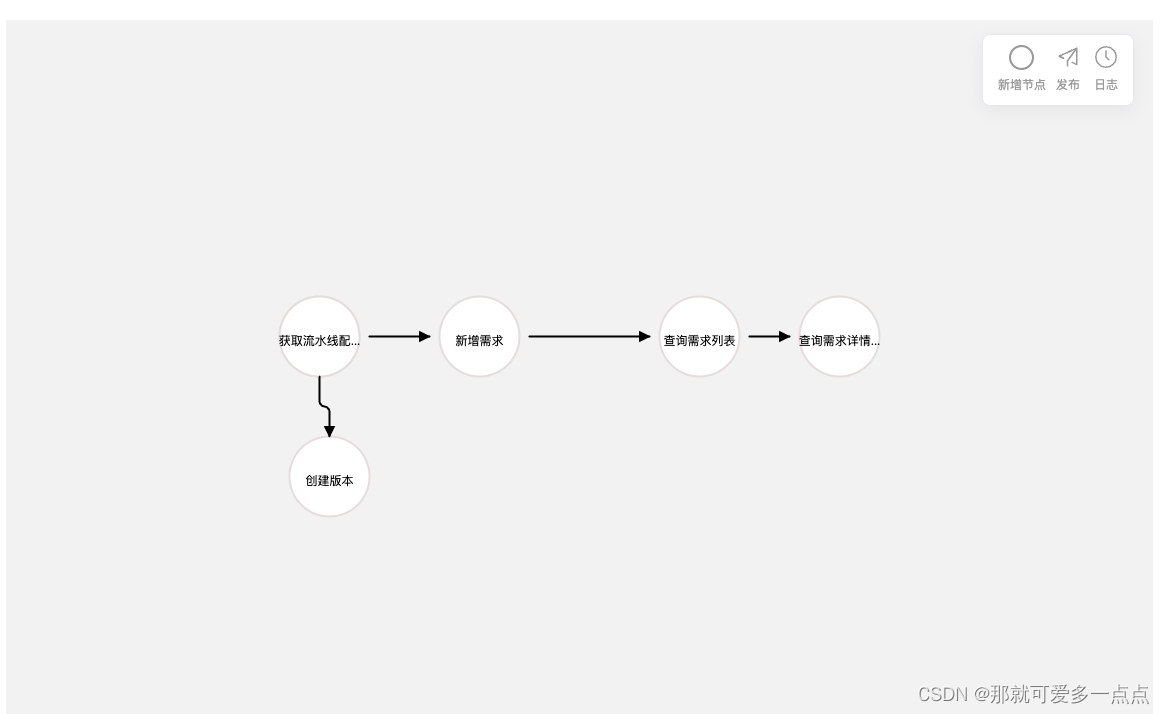
如何自己实现一个丝滑的流程图绘制工具(一)vue如何使用
背景 项目需求突然叫我实现一个类似processOn一样的在线流程图绘制工具。 这可难倒我了,立马去做调研,在github上找了很多个开源的流程图绘制工具, 对比下来我还是选择了 bpmn-js 原因: 1、他的流程图是涉及到业务的,…...
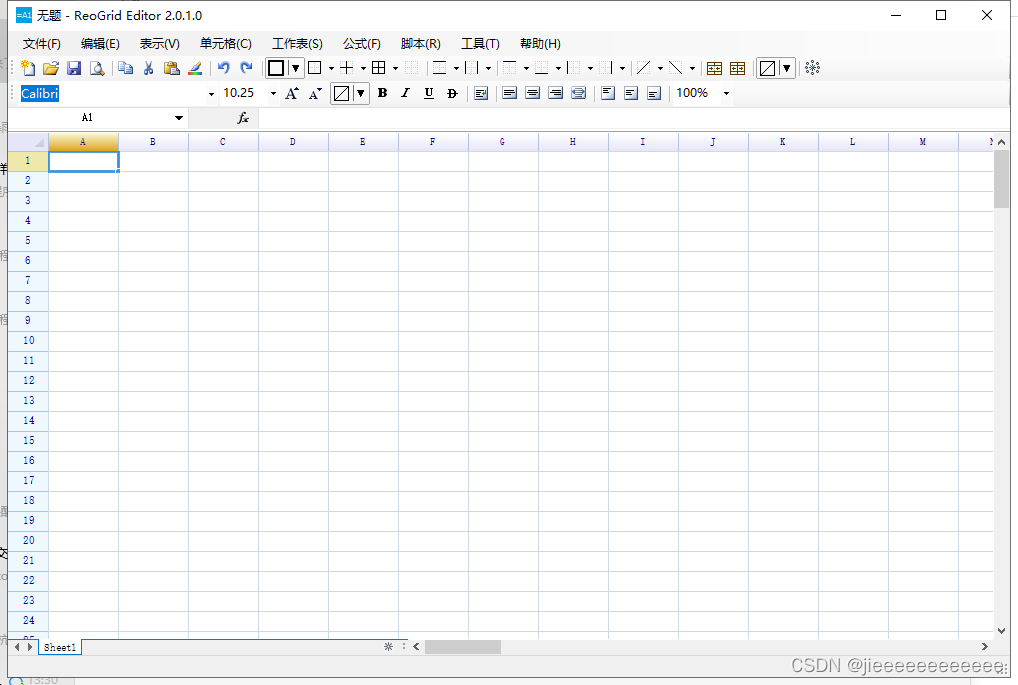
ReoGrid.NET集成到winfrom
ReoGrid一个支持excel操作的控件,支持集成到任何winfrom项目内。 先看效果图: 如何使用: 使用ReoGrid自带excel模版设计工具先设计一个模版,设计器如下: 具体例子看官方文档 代码示例如下: var sheet reoGridControl1.CurrentWorksheet; …...

Elasticsearch实现增删改查
调用elasticsearch通常使用restful风格请求,这里记录一些常用的Java API和Postman Url Java API调用Es 1. 查询总文档数 Testvoid getAllCount() { // RestHighLevelClient clientnew RestHighLevelClient(RestClient.builder(new HttpHost("192.168…...
)
Rust 学习笔记(卷二)
文章目录 Rust 学习笔记(卷二)八、工程1. package 和 cratepackage 总览包根(crate root) 2. 模块初识模块单个源文件中的嵌套模块使用具有层级结构的源文件构造嵌套模块 3. 文档4. 使用第三方包5. 打包自己的包 九、标准库十、多…...

android amazon 支付接入
流程: 申请 Amazon 开发者帐号 ---> 在 amazon 控制台添加应用 ---> 添加应用内商品(消费类商品,授权类商品,订阅类商品)---> 导出 JSON 文件 --->集成 Amazon 支付 ---> 将导出的 JSON 文件 copy 到 …...

Vue2-快速搭建pc端后台管理系统
一.推荐二次开发框架 vue-element-admin Star(84k)vue-antd-admin Star(3.5k) 二.vue-element-admin 官网链接:https://panjiachen.github.io/vue-element-admin-site/zh/ 我这里搭建的是基础模版vue-admin-template(推荐) # 克隆项目 git clone https://github.com/PanJi…...

【产品文档】团队介绍PPT模板
今天和大家免费分享团队介绍的PPT模板。团队介绍是向他人展示团队的实力、专业性和能力的重要方式。通过一个有力的团队介绍,您可以突出团队的成员、经验、技能和取得的成就,从而增加信任、吸引合作伙伴、客户或投资者的兴趣 【模板预览】 动态演示效果…...
组件库的使用和自定义组件
目录 一、组件库介绍 1、什么是组件 2、组件库介绍 3、arco.design 二、组件库的使用 1、快速上手 2、主题定制 3、暗黑模式 4、语言国际化 5、业务常见问题 三、自定义组件 2、组件开发规范 3、示例实践guide-tip 4、业务组件快速托管 一、组件库介绍 1、什么是…...
网站和API支持HTTPS,最好在Nginx上配置
随着我们网站用户的增多,我们会逐渐意识到HTTPS加密的重要性。在不修改现有代码的情况下,要从HTTP升级到HTTPS,让Nginx支持HTTPS是个很好的选择。今天我们来讲下如何从Nginx入手,从HTTP升级到HTTPS,同时支持静态网站和…...
UnitTest笔记: 拓展库DDT的使用
DDT (Data-Drivers- Tests) 允许使用不同的测试数据运行同一个测试用例,展示为不同的测试用例。 第一步: pip安装 ddt 第二步: 创建test_baidu_ddt.py 1. 测试类要使用ddt 修饰 2. 不同形式的参数化: 列表,字典&a…...
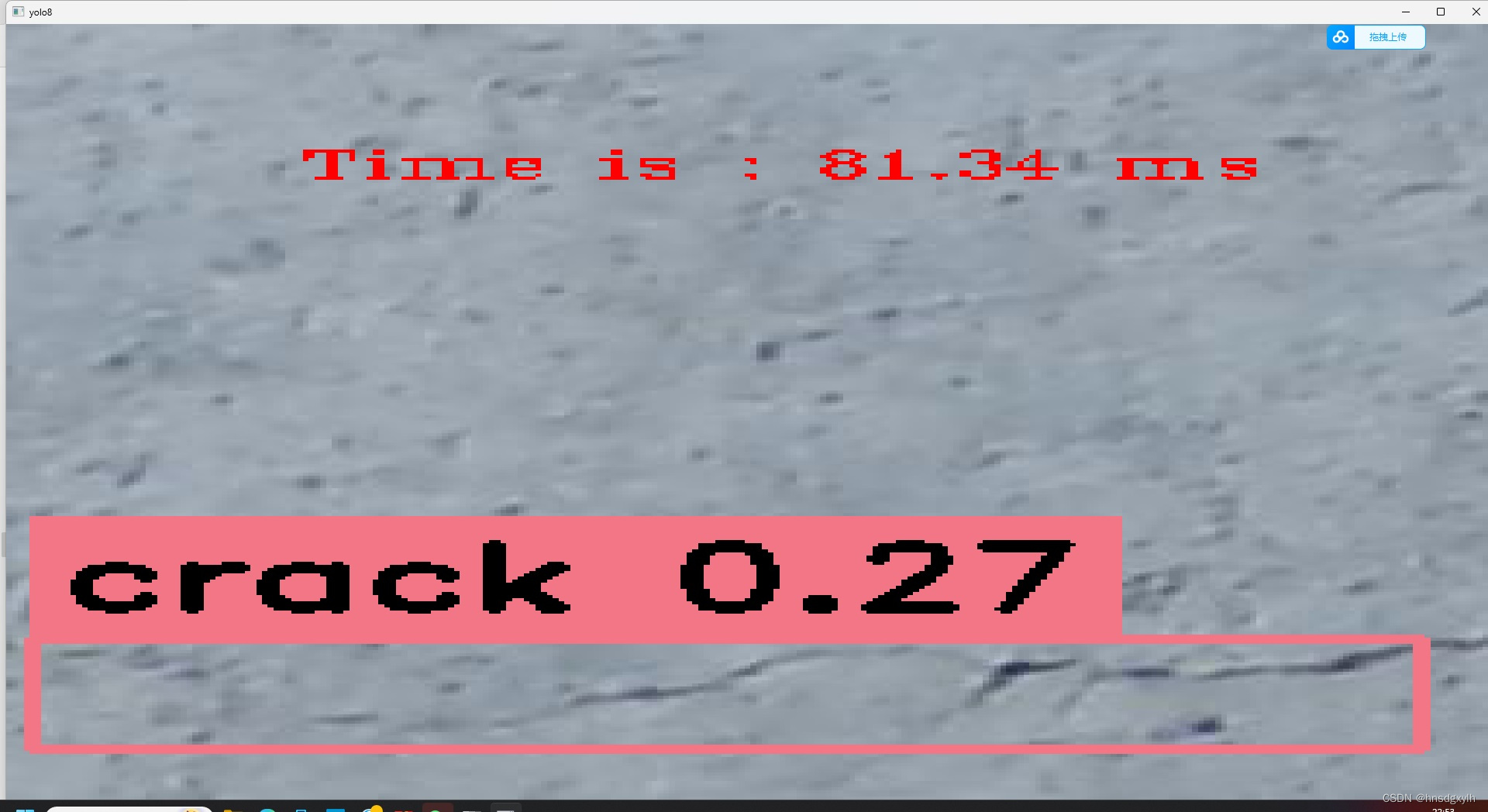
裂缝检测,只依赖OPENCV,基于YOLO8S
裂缝检测,只依赖OPENCV,YOLOV8S 现在YOLOV8S训练目标非常方便,可以直接转换成ONNX让OPENCV调用,支持C/PYTHON,原理很简单,自己找博客,有兴趣相互交流...

python编程环境使用技巧3-程序打包pyinstaller
前言 在Python中,打包指的是将Python代码和相关资源(如配置文件、图像等)整合到一个可执行的文件或安装包中,以便于在其他环境中使用。 下面是使用pyinstaller进行打包的简要步骤: 1-安装pyinstaller:在命…...

Go 自学:defer关键字
我们可以使用defer关键字延迟代码的执行,相当于我们把代码放入一个stack中,遵循last in first out的原则输出代码。 package mainimport ("fmt" )func myDefer() {for i : 0; i < 5; i {defer fmt.Print(i)} }func main() {defer fmt.Prin…...
)
自动驾驶中的路径规划实战:手把手教你用Python复现RRT与RRT*算法(含动态演示)
自动驾驶路径规划实战:Python实现RRT与RRT*算法全解析 从理论到实践的路径规划探索 在自动驾驶技术快速发展的今天,路径规划作为核心算法之一,直接决定了车辆能否安全高效地完成行驶任务。想象一下,当你驾驶车辆进入一个复杂的停车…...
的片段,列出了 Windows 平台下 Python 3.13.11)
Python 官方下载页面(如 python.org/downloads/)的片段,列出了 Windows 平台下 Python 3.13.11
Python 官方下载页面(如 python.org/downloads/)的片段,列出了 Windows 平台下 Python 3.13.11(发布于 2025 年 12 月 5 日)的多种安装包选项。以下是各选项的简要说明: Windows installer (64-bit / 32-b…...

SHA-3:从海绵结构到抗量子密码学的基石
1. SHA-3的诞生背景与核心价值 2004年,密码学界发现SHA-1存在理论漏洞,这直接推动了NIST启动新一代哈希算法竞赛。经过5年激烈角逐,Keccak团队提出的海绵结构方案最终胜出。与传统哈希算法不同,SHA-3不是对SHA-2的简单升级&#x…...

Xilinx FPGA FIFO IP核复位机制深度解析与实战调试
1. Xilinx FPGA FIFO IP核复位机制基础解析 第一次接触Xilinx FPGA的FIFO IP核时,很多人都会在复位环节栽跟头。我刚开始用Vivado生成FIFO IP核时,就遇到过复位信号处理不当导致数据丢失的问题。FIFO(First In First Out)作为数据…...

STM32duino ILPS22QS气压传感器驱动深度解析
1. 项目概述STM32duino ILPS22QS 是一个面向 STM32 平台的 Arduino 兼容库,专为意法半导体(STMicroelectronics)推出的超低功耗数字气压传感器 ILPS22QS 设计。该库并非通用传感器抽象层,而是深度适配 STM32 硬件生态的底层驱动实…...

PCtoLCD2002字模提取软件:从基础配置到高效应用
1. PCtoLCD2002基础功能解析 第一次接触PCtoLCD2002时,我被它简洁的界面和强大的功能所吸引。这款软件虽然体积小巧,但在嵌入式开发领域却是不可或缺的利器。它主要解决了一个核心问题:如何将我们熟悉的文字和图形,转换成单片机能…...

颠覆性AI语音转换技术深度解析:Retrieval-based-Voice-Conversion-WebUI的5大创新特性揭秘
颠覆性AI语音转换技术深度解析:Retrieval-based-Voice-Conversion-WebUI的5大创新特性揭秘 【免费下载链接】Retrieval-based-Voice-Conversion-WebUI 语音数据小于等于10分钟也可以用来训练一个优秀的变声模型! 项目地址: https://gitcode.com/GitHub…...

ROS中tf2坐标系命名规范详解:为什么你的/world会报Invalid argument错误
ROS中tf2坐标系命名规范详解:为什么你的/world会报Invalid argument错误 在ROS机器人开发中,坐标系转换(tf2)系统是构建空间感知的核心基础设施。许多开发者第一次遇到Invalid argument "/world" passed to canTransfor…...

python vue医院健康体检系统
目录技术选型与架构设计核心模块划分关键功能实现安全与合规措施部署方案开发里程碑计划项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作技术选型与架构设计 后端采用Python的Django框架,提供RESTful API接口。Djan…...

告别AN模式调试噩梦:ZYNQ千兆网用MDIO+ethtool手动配置速率,稳定性提升实测
告别AN模式调试噩梦:ZYNQ千兆网用MDIOethtool手动配置速率,稳定性提升实测 在工业自动化、车载电子等复杂电磁环境中,ZYNQ平台的千兆以太网连接稳定性常常成为工程师的痛点。当系统默认的自动协商(AN)模式频繁失效&…...