【算法与数据结构】112、LeetCode路径总和
文章目录
- 一、题目
- 二、解法
- 三、完整代码
所有的LeetCode题解索引,可以看这篇文章——【算法和数据结构】LeetCode题解。
一、题目

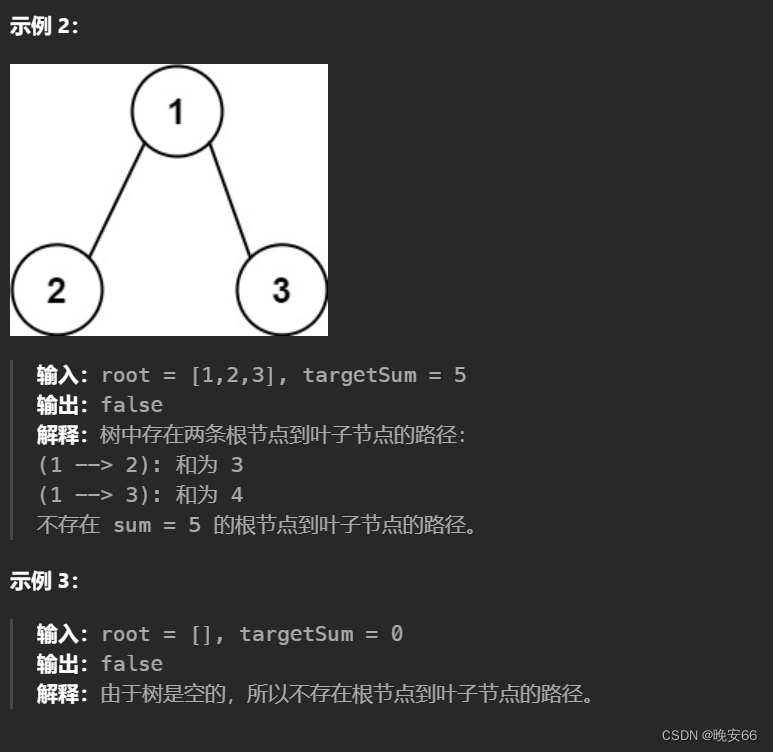
二、解法
思路分析:本题通过计算根节点到叶子节点路径上节点的值之和,然后再对比目标值。利用文章【算法和数据结构】257、LeetCode二叉树的所有路径中的递归算法。这里要注意,默认路径之和是不等于目标值,一旦递归当中出现了等于的情况就直接返回,不必继续算后面的和。因此程序当中将结果result作为引用输入参数,有true出现就直接退出了。
程序如下:
class Solution {
public: void traversal(TreeNode* root, int sumOfPath, const int targetSum, bool &result) {// 1.输入参数和返回值 sumOfPath += root->val;// 2.终止条件:遇到叶子节点if (!root->left && !root->right) {if (sumOfPath == targetSum) result = true;}// 3.单层递归逻辑:递归+回溯if (root->left && !result) traversal(root->left, sumOfPath, targetSum, result); // 左 if (root->right && !result) traversal(root->right, sumOfPath, targetSum, result); // 右}bool hasPathSum(TreeNode* root, int targetSum) {bool result = false;if(root) traversal(root, 0, targetSum, result);return result;}
};
复杂度分析:
- 时间复杂度: O ( n ) O(n) O(n)。
- 空间复杂度: O ( n ) O(n) O(n)。
三、完整代码
# include <iostream>
# include <vector>
# include <queue>
# include <string>
# include <algorithm>
# include <stack>
using namespace std;// 树节点定义
struct TreeNode {int val;TreeNode* left;TreeNode* right;TreeNode() : val(0), left(nullptr), right(nullptr) {}TreeNode(int x) : val(x), left(nullptr), right(nullptr) {}TreeNode(int x, TreeNode* left, TreeNode* right) : val(x), left(left), right(right) {}
};class Solution {
public: void traversal(TreeNode* root, int sumOfPath, const int targetSum, bool &result) {// 1.输入参数和返回值 sumOfPath += root->val;// 2.终止条件:遇到叶子节点if (!root->left && !root->right) {if (sumOfPath == targetSum) result = true;}// 3.单层递归逻辑:递归+回溯if (root->left && !result) traversal(root->left, sumOfPath, targetSum, result); // 左 if (root->right && !result) traversal(root->right, sumOfPath, targetSum, result); // 右}bool hasPathSum(TreeNode* root, int targetSum) {bool result = false;if(root) traversal(root, 0, targetSum, result);return result;}
};template<typename T>
void my_print(T& v, const string msg)
{cout << msg << endl;for (class T::iterator it = v.begin(); it != v.end(); it++) {cout << *it << ' ';}cout << endl;
}template<class T1, class T2>
void my_print2(T1& v, const string str) {cout << str << endl;for (class T1::iterator vit = v.begin(); vit < v.end(); ++vit) {for (class T2::iterator it = (*vit).begin(); it < (*vit).end(); ++it) {cout << *it << ' ';}cout << endl;}
}// 前序遍历迭代法创建二叉树,每次迭代将容器首元素弹出(弹出代码还可以再优化)
void Tree_Generator(vector<string>& t, TreeNode*& node) {if (!t.size() || t[0] == "NULL") return; // 退出条件else {node = new TreeNode(stoi(t[0].c_str())); // 中if (t.size()) {t.assign(t.begin() + 1, t.end());Tree_Generator(t, node->left); // 左}if (t.size()) {t.assign(t.begin() + 1, t.end());Tree_Generator(t, node->right); // 右}}
}// 层序遍历
vector<vector<int>> levelOrder(TreeNode* root) {queue<TreeNode*> que;if (root != NULL) que.push(root);vector<vector<int>> result;while (!que.empty()) {int size = que.size(); // size必须固定, que.size()是不断变化的vector<int> vec;for (int i = 0; i < size; ++i) {TreeNode* node = que.front();que.pop();vec.push_back(node->val);if (node->left) que.push(node->left);if (node->right) que.push(node->right);}result.push_back(vec);}return result;
}// 二叉树所有路径
class Solution2 {
public:// 前序遍历递归法:精简版本 void traversal(TreeNode* root, string path, vector<string>& result) { // 1.输入参数和返回值 path += to_string(root->val); // 中间节点先加入pathif (!root->left && !root->right) { // 2.终止条件:遇到叶子节点result.push_back(path);return;}// 3.单层递归逻辑:递归+回溯if (root->left) traversal(root->left, path + "->", result); // 左if (root->right) traversal(root->right, path + "->", result); // 右}vector<string> binaryTreePaths(TreeNode* root) {vector<string> result;if (!root) return result;traversal(root, "", result);return result;}
};int main()
{vector<string> t = { "5", "4", "11", "7", "NULL", "NULL", "2", "NULL", "NULL", "NULL", "8", "13", "NULL", "NULL", "4", "NULL", "1", "NULL", "NULL"}; // 前序遍历my_print(t, "目标树");TreeNode* root = new TreeNode();Tree_Generator(t, root);vector<vector<int>> tree = levelOrder(root);my_print2<vector<vector<int>>, vector<int>>(tree, "目标树:");Solution2 s2;vector<string> path = s2.binaryTreePaths(root);my_print(path, "所有路径为:");Solution s;int targetSum = 22;bool result = s.hasPathSum(root, targetSum);cout << "路径总和是否满足目标值: " << result << endl;system("pause");return 0;
}
end
相关文章:
【算法与数据结构】112、LeetCode路径总和
文章目录 一、题目二、解法三、完整代码 所有的LeetCode题解索引,可以看这篇文章——【算法和数据结构】LeetCode题解。 一、题目 二、解法 思路分析:本题通过计算根节点到叶子节点路径上节点的值之和,然后再对比目标值。利用文章【算法和数据…...

②matlab桌面和编辑器
目录 matlab编辑器练习 运行脚本 matlab编辑器练习 您可以通过点击灰色代码框在脚本中输入命令。 准备就绪后,您可以通过点击蓝色的提交按钮提交代码。 任务 在脚本中输入命令 r 3。 2.任务 在脚本中添加命令 x pi*r^2。 附加练习 当您在实时编辑器中完成…...
高亮img、pdf重点部分(html2canvas、pdfjs-dist、react-pdf)
可用业务场景 报销单据审批中,高亮发票部分 需求 后台返回一张图片或者pdf、返回一组坐标,坐标类型[number,number,number,number],分别代表了x、y、width、height。需要根据坐标在图片上高亮出来坐标位置。如下图 高亮的坐标是࿱…...

18.神奇导航菜单指示器
效果 源码 <!DOCTYPE html> <html> <head> <title>Magic Menu Indicator | 03</title> <link rel="stylesheet" type="text/css" href="style.css"> </head> <body><div class="navig…...
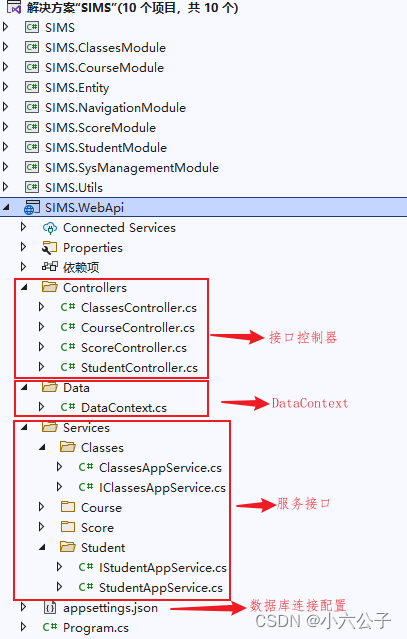
WPF+Prism+WebApi 学习总结
一、基本概念 WPF:WPF(Windows Presentation Foundation)是(微软推出的)基于Windows的用户界面框架,提供了统一的编程模型,语言和框架,做到了分离界面设计人员与开发人员的工作;WPF…...
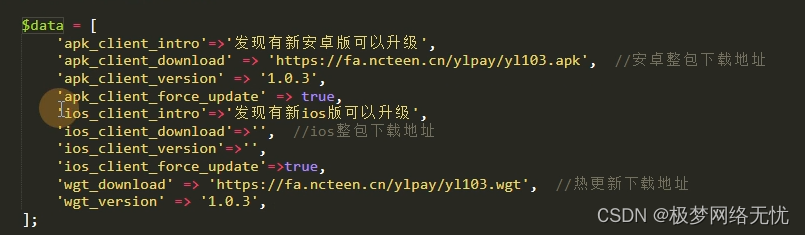
uniapp热更新
首先热更新需要wgt包; 其次先了解这两个组件 下载的方法 安装的组件 场景: 当你项目的js文件或者页面文件或者静态图片文件css文件更新的时候可以走热更新; 而当你安装新的组件插件或者开启新的权限等功能的时候就无法通过热更新进行更新了…...
)
AUTOSAR从入门到精通-【应用篇】基于CAN协议的汽车尾气后处理诊断系统的软件开发(续)
目录 尾气后处理诊断程序的开发 5.1 数据库的解析 5.1.1 寻找XML文件 5.1.2 读取XML文件...

mybatis plus新版代码生成器,类型转换处理器ITypeConvertHandler使用
目录 引言关键代码源码分析记录一坑类型转换的第二种方式完整源码地址 引言 当默认生成的数据类型不满足时,就需要自定义指定要生成的类型 关键代码 FastAutoGenerator.create(url, username, password).dataSourceConfig(builder -> {builder.typeConvertHandl…...
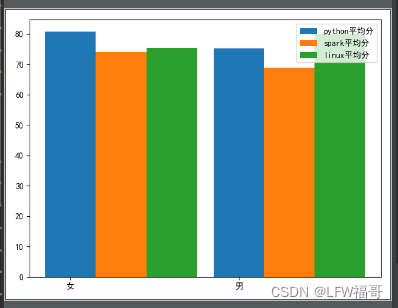
python中的matplotlib画直方图(数据分析与可视化)
python中的matplotlib画直方图(数据分析与可视化) import numpy as np import pandas as pd import matplotlib.pyplot as pltpd.set_option("max_columns",None) plt.rcParams[font.sans-serif][SimHei] plt.rcParams[axes.unicode_minus]Fa…...

【详解】文本检测OCR模型的评价指标
关于文本检测OCR模型的评价指标 前言:网上关于评价标准乱七八糟的,有关于单词的,有关于段落的,似乎没见过谁解释一下常见论文中常用的评价指标具体是怎么计算的,比如DBNet,比如RCNN,这似乎好像…...
)
Python遥感图像处理应用篇038 GDAL 遥感图像特征提取(统计特征图)
1.图像统计特征 遥感图像的统计特征是对图像中像素值的统计分布进行定量化描述的过程。这些统计特征可以提供关于图像内容和特性的有用信息。下面是一些常用的遥感图像统计特征描述方法: 平均值(Mean):计算图像中所有像素值的平均值,可以反映整个图像的亮度水平。 方差(…...
全局ID生成方式
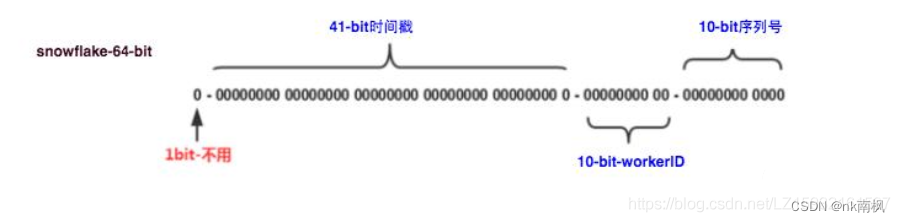
全局ID生成方式 目录 1. 全局唯一id介绍 1.1 特点 2. 常见的全局唯一id生成策略 2.1 利用数据库自增字段生成id2.2 UUID2.3 Redis生成id2.4 zookeeper生成ID2.5 Twitter的snowflake算法 3. 面试题目:实现一个全局的ID生成器,注意线程安全 3.1 单例模式…...
c++之指针
总结性质 我们如何在一个函数中获取数组的长度: 我们都知道,在main函数中我们获得数组的长度只需要使用sizeof(a)/sizeof(a【0】)即可获得,但当我们把一个数组传入到方法时,c默认把…...
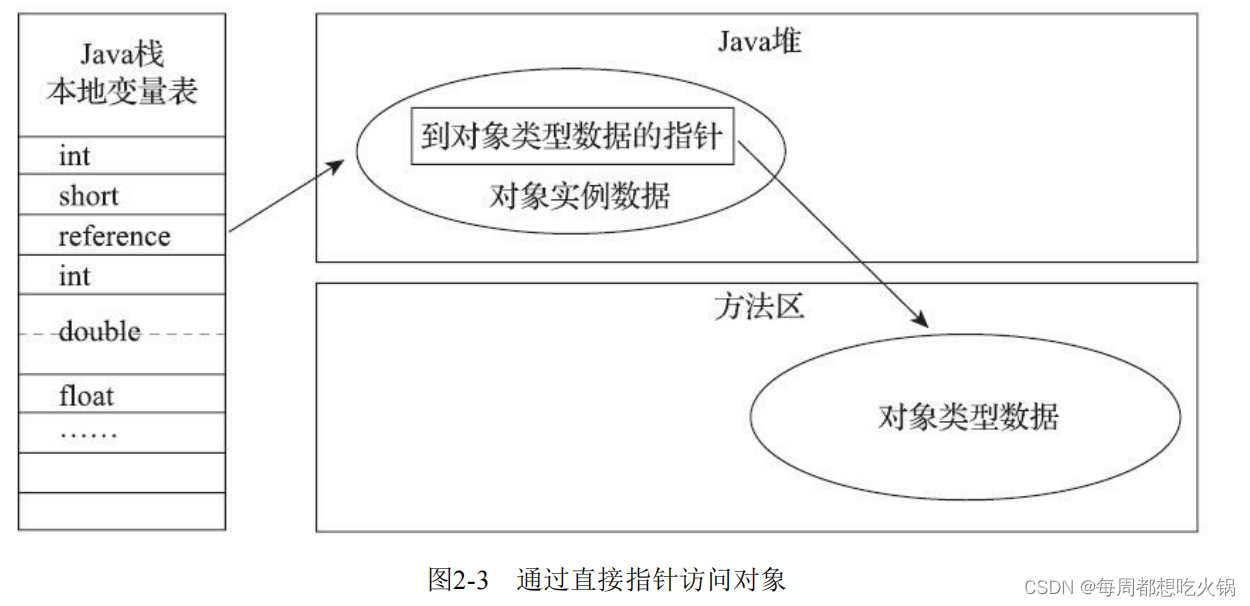
JVM 访问对象的两种方式
Java 程序会通过栈上的 reference 数据来操作堆上的具体对象。由于 reference 类型在《Java 虚拟机规范》里面只规定了它是一个指向对象的引用,并没有定义这个引用应该通过什么方式去定位、访问到堆中对象的具体位置,所以对象访问方式也是由虚拟机实现而…...

yo!这里是Linux基础开发工具介绍
目录 前言 基础开发工具 yum vim 1.基本介绍 2.基本操作 3.正常模式常用命令 4.底行模式常用命令 gcc/g gdb 1.基本介绍 2.常用操作 make/Makefile 1.背景 2.介绍 3.使用 git 1.介绍 2.操作 进度条程序简单实现 后记 前言 在学完初步的基础指令及权限控…...
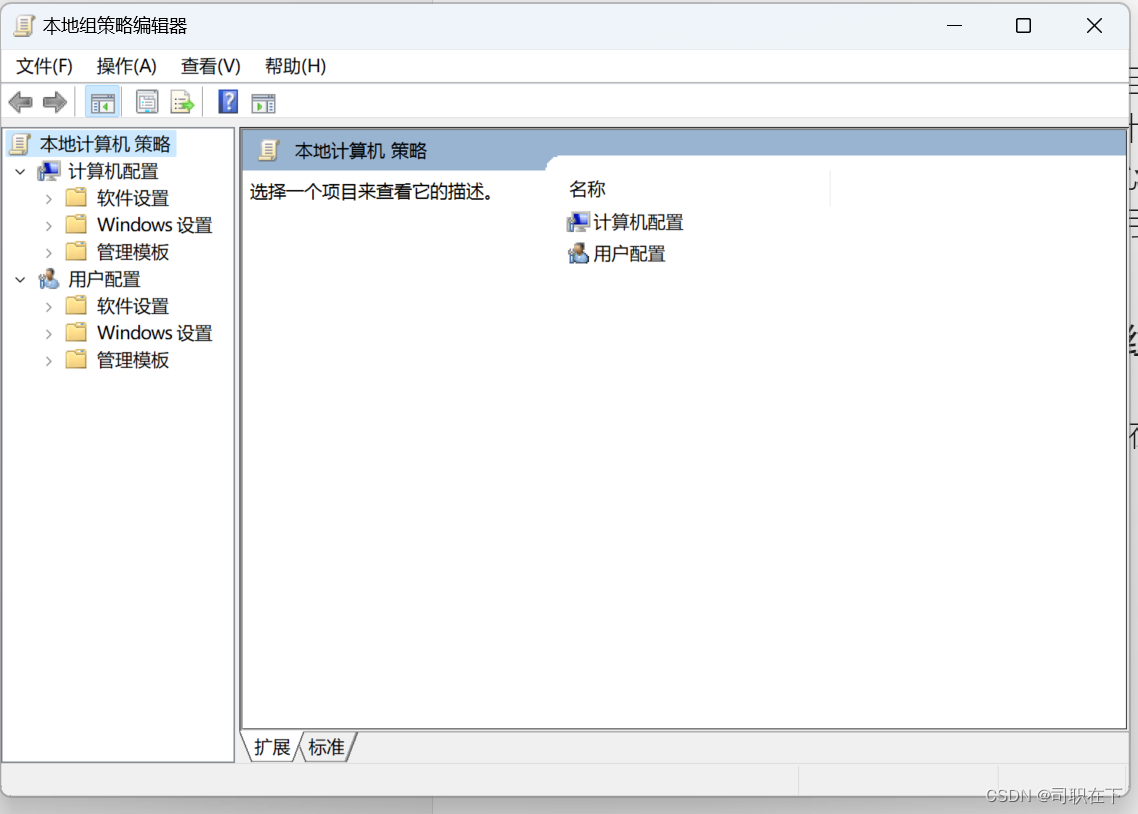
本地组策略编辑器找不到怎么解决?| 解决windows home 版本隐藏本地组策略编辑器的问题 | 简单的介绍本地组策略编辑器
一般的 Windows 非家庭系统中,本地组策略编辑器不会被隐藏,但在某些特定情况下,可能会受到限制或不可用。如果你无法访问本地组策略编辑器,并且认为应该可以访问,请确保你拥有管理员权限,并检查是否有任何系…...
将Spring boot 项目部署到tomcat服务艰难
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z X Y Z...

第十二章 ObjectScript - 命令
文章目录 第十二章 ObjectScript - 命令命令熟悉的命令用于多维数组的命令 第十二章 ObjectScript - 命令 命令 本节概述了在 ObjectScript 常用命令。其中包括与其他语言中的命令相似的命令,以及其他语言中没有等效项的其他命令。 命令名称不区分大小写…...

在 CentOS 7 / RHEL 7 上安装 OpenSSL 1.1.x
OpenSSL 是一个开源软件库,由用于实现传输层安全 (TLS) 和安全套接字层 (SSL) 协议以及其他加密功能(例如签名、加密、解密和验证)的工具和库组成。操作系统和许多应用程序使用 OpenSSL 通过互联网提供安全通信。 CentOS 7 / RHEL 7 操作系统…...

论文阅读_模型结构_LoRA
name_en: LoRA: Low-Rank Adaptation of Large Language Models name_ch: LORA:大语言模型的低阶自适应 paper_addr: http://arxiv.org/abs/2106.09685 date_read: 2023-08-17 date_publish: 2021-10-16 tags: [‘深度学习’,‘大模型’] author: Edward J. Hu cita…...

穿越机老鸟踩坑实录:MPU6000传感器在F4飞控上的IMU方向“玄学”配置
穿越机IMU方向配置实战:从MPU6000异常自旋到飞控底层校准 当你的穿越机在通电瞬间像被无形大手狠狠抽了一记耳光般疯狂自旋,而Betaflight地面站里陀螺仪数据却显示"一切正常"时,这往往意味着你正遭遇IMU方向配置的"量子纠缠态…...

终极指南:如何为PotPlayer配置百度翻译插件实现实时字幕翻译
终极指南:如何为PotPlayer配置百度翻译插件实现实时字幕翻译 【免费下载链接】PotPlayer_Subtitle_Translate_Baidu PotPlayer 字幕在线翻译插件 - 百度平台 项目地址: https://gitcode.com/gh_mirrors/po/PotPlayer_Subtitle_Translate_Baidu PotPlayer_Sub…...

5分钟快速上手:使用res-downloader实现视频号批量下载的终极指南
5分钟快速上手:使用res-downloader实现视频号批量下载的终极指南 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader …...

Thorium浏览器深度解析:5个核心优势与进阶配置实战
Thorium浏览器深度解析:5个核心优势与进阶配置实战 【免费下载链接】thorium Chromium fork named after radioactive element No. 90. Source code and Linux releases. Windows/MacOS/ARM builds served in different repos, links are towards the top of the RE…...

Biomni:生物医学图像分析从入门到精通,AI与传统CV融合实战
1. 项目概述:当AI学会“看”懂生物医学图像如果你在生物医学研究、药物发现或者临床诊断领域工作,大概率会和我一样,对海量的生物医学图像数据感到既兴奋又头疼。兴奋的是,这些图像——无论是显微镜下的细胞切片、组织病理学玻片&…...

Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞!
Windows Cleaner终极指南:三步告别C盘爆红,让电脑运行如飞! 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 还在为Windows系统…...

从开源AI导师项目GURU-Ai拆解:如何构建具备教学能力的智能体
1. 项目概述:一个“AI导师”的诞生与定位最近在GitHub上看到一个挺有意思的项目,叫“Guru322/GURU-Ai”。光看名字,你可能会觉得这又是一个平平无奇的AI工具仓库。但点进去细看,你会发现它的野心不小——它想做的不是又一个聊天机…...

品牌声音技能化:从模糊概念到可执行AI内容策略
1. 项目概述:品牌声音的“技能化”构建最近在和一些做品牌营销、内容运营的朋友聊天,发现一个挺普遍的现象:大家手里都有一堆品牌手册、VI规范,但一到具体执行,比如写一篇公众号推文、拍一条短视频,或者回复…...

【ElevenLabs情绪模拟技术白皮书】:基于2,147小时情感语音标注数据集的11类基础情绪迁移模型验证报告
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs情绪模拟技术白皮书概述 ElevenLabs的情绪模拟技术并非简单调节音高或语速,而是基于多模态情感表征学习(Multimodal Affective Representation Learning, MARL&#x…...

基于Helm Chart的JupyterHub生产级部署与运维实战指南
1. 项目概述:为什么我们需要一个可扩展的JupyterHub部署方案?如果你在团队里负责过数据科学或机器学习平台的搭建,大概率会为Jupyter Notebook的部署和管理头疼过。单个Jupyter Notebook服务给一两个人用还行,一旦团队规模扩大到十…...