科研无人机平台P600进阶版,突破科研难题!
随着无人机技术日益成熟,无人机的应用领域不断扩大,对无人机研发的需求也在不断增加。然而,许多开发人员面临着无法从零开始构建无人机的时间和精力压力,同时也缺乏适合的软件平台来支持他们的开发工作。为了解决这个问题,我们特别开发了科研无人机平台P600进阶版,为开发人员提供了一个全面的解决方案。

科研无人机平台P600进阶版是一款专业科研无人机开发平台,基于PX4开源飞控技术打造而成,可搭配高精度RTK定位模块、高效数传链路和多类型机载电脑。该平台采用Prometheus自主无人机软件平台作为机载系统,提供了控制、通信等各种代码框架和相应接口;软硬兼修、可拓展性强,适用于无人机行业应用开发以及室外环境下的无人机算法验证,助力开发者快速实现二次开发,大大提升科研效率。
硬件组成
1、飞行平台
科迪威 DP1000工业级的无人机平台,其动力系统采用FOC(Field-Oriented Control),即磁场定向控制,使得电机转矩平稳、噪声小、效率高,并且具有高速的动态响应。整套无人机到手即飞,具有大载重、长续航的优点。

2、开源PX4飞控
PX4是一款用于无人机和其他无人驾驶车辆(如无人车,无人船)的开源飞行控制软件。其为无人机开发人员提供了一套灵活的工具来共享技术,为无人机应用程序创建量身定制了解决方案。
3、机载电脑
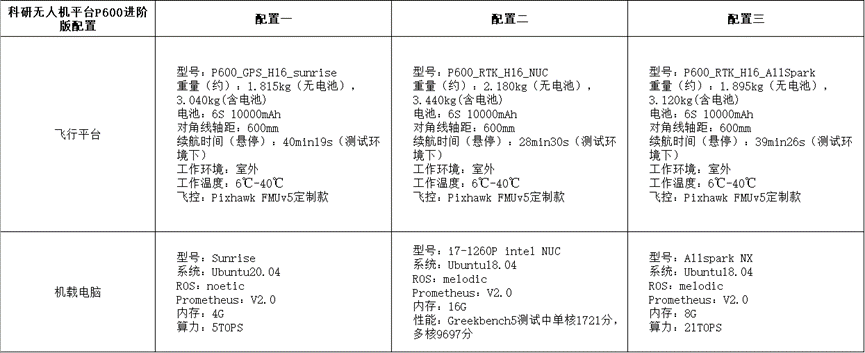
科研无人机平台P600进阶版提供了Sunrise、NUC和Allspark三款机载电脑,开发者可自行选择,分别对应数据中枢、CPU以及GPU需求。
4、RTK
定位方面有GPS和厘米级高精度RTK可选,也可选择更换视觉V-RTK定位。
软件组成
1、机载开源软件
Prometheus V2系统基于ROS及Prometheus开源框架,自带功能丰富。提供定位信息、飞行模式、电池状态、IMU等无人机状态及传感器数据接口,位置、速度、加速度及姿态等控制接口,以及相关开发接口使用例程。内置安全保护机制,降低炸机风险;配套软件仿真,支持仿真Demo与真机快速切换。

2、专业地面站软件
PrometheusGroundStation-Pro是专用于Prometheus自主无人机系统(V2版本)的地面站软件,支持所有使用了Prometheus v2版本的无人机或者仿真主机。功能上包括了单机控制、集群控制、数据监控、视频流显示、卫星地图的轨迹显示和实时位置显示、平面地图的实时位置显示和期望点指示、参数配置、一键启动等功能。同时该软件使用了阿木实验室吊舱的控制接口、图像操作使用等功能,在所有H16-RTK版本的无人机中更是提供了RTCM数据转发功能。下面是部分功能界面展示:
-
地图说明
分为卫星地图和平面地图,其中卫星地图由无人机GPS数据进行实时位置显示。

平面地图则根据无人机自身位置数据进行实时显示(即无人机状态数据中的Position数据),并且会根据用户提供的期望位置,进行一些提示,用以告诉用户飞机飞向的位置。

-
一键启动说明
在这里设置机载端需要启动的脚本,支持launch文件和脚本文件(.sh)两种。生成按钮后会在功能脚本上显示,通过点击可以启动机载端对应脚本。


-
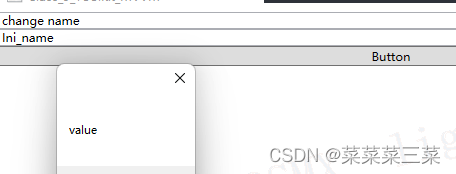
参数配置
可以加载机载端的yaml文件或一些launch文件中的参数进行显示,同时可以在该界面上进行实时修改。

-
飞行日志记录、轨迹绘图
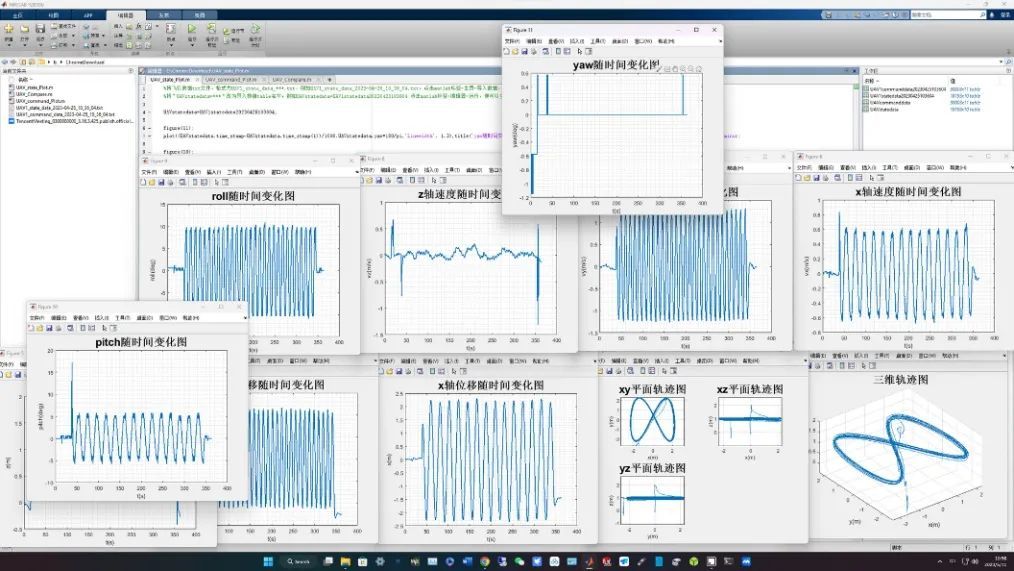
科研无人机平台P600进阶版核心优势
1、可拓展性强
科研无人机平台P600进阶版有着良好的拓展性,可加装Homer、5G等通信模块以及吊舱等其它传感器设备。

2、支持二次开发
科研无人机平台P600进阶版支持二次开发,并且提供uav_control控制模块详细说明,如下:
-
uav_control代码框架说明;
-
uav_control话题介绍;
-
uav_control参数介绍;
-
uav_control消息介绍;
-
uav_control坐标系及安全保护;
-
Prometheus地面站控制逻辑;
-
二次开发教程Demo。
3、提供定制服务
-
支持更换V-RTK(视觉RTK);
-
机载电脑型号定制(x86系列、arm系列等);
-
通信模块定制(Homer、Minihomer、5G模块等);
-
地面站软件定制;
-
加装传感器(比如激光雷达、双目相机等);
-
提供集群通信开发服务。
技术参数及配置
技术手册:https://docs.amovlab.com/p600-uav-wiki/#/
- End -
阿木实验室校园赞助计划主要对象为参与开源项目或在相关技术领域获得荣誉成果的用户。活动分为两部分,分别是技术文章创作和论文奖学金,根据活动规则可分别获得一、二、三等奖的奖励,奖金最高可达10000元,欢迎大家踊跃咨询。阿木实验室,公众号:阿木实验室阿木实验室校园赞助,万元奖学金等你来挑战!
相关文章:
科研无人机平台P600进阶版,突破科研难题!
随着无人机技术日益成熟,无人机的应用领域不断扩大,对无人机研发的需求也在不断增加。然而,许多开发人员面临着无法从零开始构建无人机的时间和精力压力,同时也缺乏适合的软件平台来支持他们的开发工作。为了解决这个问题…...
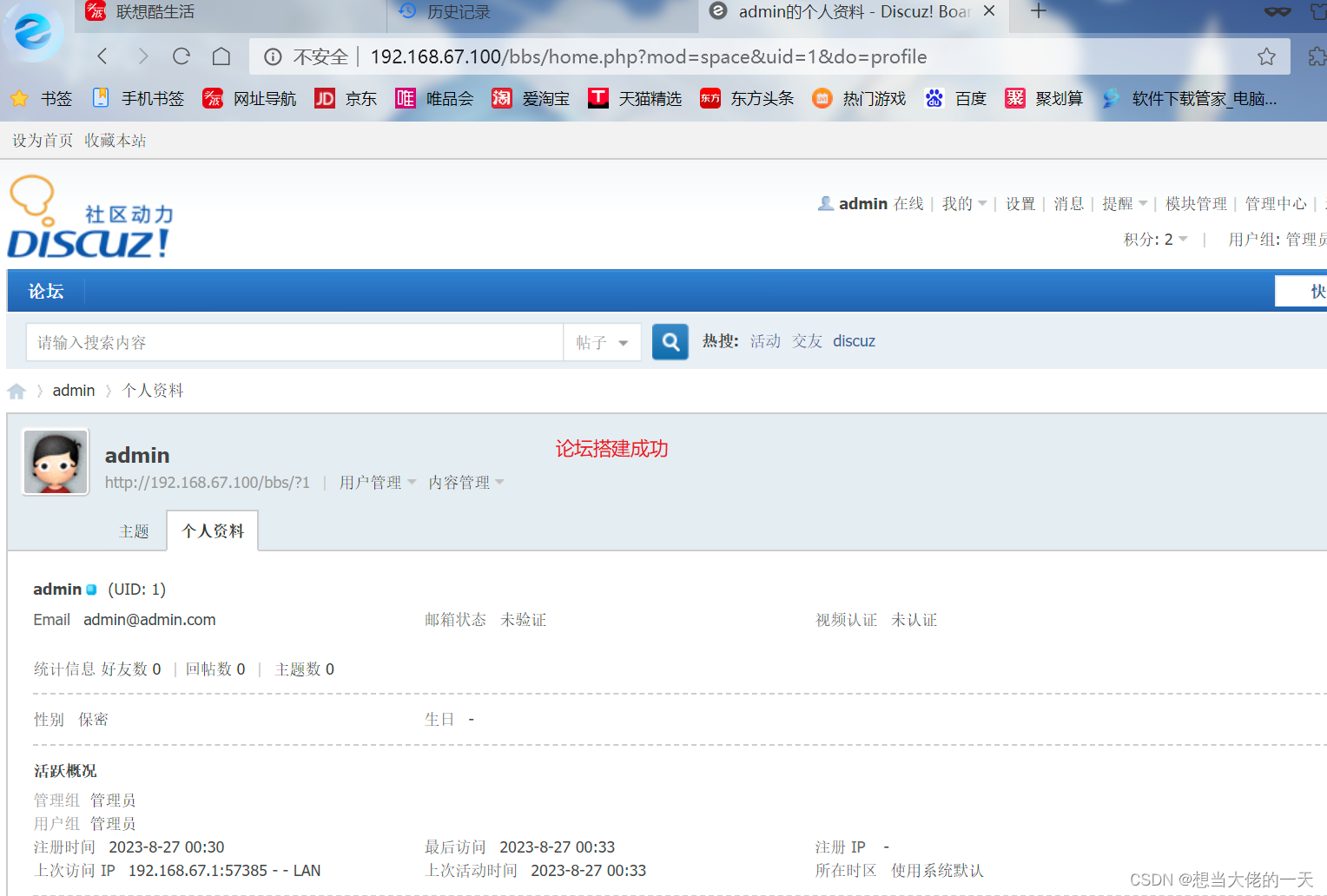
Apache的简单介绍(LAMP架构+搭建Discuz论坛)
文章目录 1.Apache概述1.1什么是apache1.2 apache的功能及特性1.2.1功能1.2.2特性 1.3 MPM 工作模式1.3.1 prefork模式1.3.2 worker模式1.3.3 event模式 2.LAMP概述2.1 LAMP的组成2.2 LAMP各组件的主要作用2.3 LAMP的工作过程2.4CGI和FastCGI 3.搭建Discuz论坛所需4.编译安装Ap…...
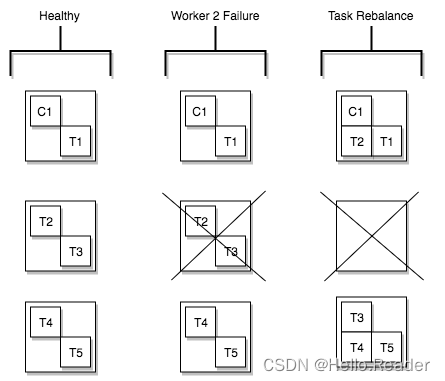
CDL基础原理
一、CDL简介 CDL(全称Change Data Loader)是一个基于Kafka Connect框架的实时数据集成服务。 CDL服务能够从各种OLTP数据库中捕获数据库的Data Change事件,并推送到kafka,再由sink connector推送到大数据生态系统中。 CDL目前支…...
WPF基础入门-Class7-WPF-MVVN框架
WPF基础入门 Class7-MVVN框架 使用框架可以省掉如Class6中的ViewModelBase.cs的OnPropertyChanged,亦方便命令传参 1、NuGet安装CommunityToolkit.Mvvm(原Mircrosoft.Toolkit.Mvvm)也可以安装MVVMLight等其他集成库 2、显示页面࿱…...

C语言练习题第三弹!!!绝对典中典!!!
目录 1.单身狗1 1.1 题目 1.2 分析推理 1.3 代码实现 2.单身狗2 2.1 题目 2.2 分析推理 2.3 代码实现 3.字符串左旋 3.1 题目 3.2 分析推理 3.3 代码实现 3.3.1 方法一 3.3.2 优化一 3.3.2.1 思路分析 3.3.2.2 strcpy函数和strncat函数 3.3.2.3 代码实现 3.3.…...

Jedis
Jedis 使用Java操作redis Jedis是redis官方推荐的Java连接开发工具! 使用Java操作redis的中间件 测试 导入对应的依赖 <!-- https://mvnrepository.com/artifact/redis.clients/jedis --><dependency><groupId>redis.clients</groupId&g…...

Linux 使用TCP_INFO查询TCP连接的状态信息
Linux 上可以使用TCP_INFO查询TCP连接状态信息包括: 发送方拥塞窗口阈值、发送方缓冲区拥塞窗口、advmss(Advertised MSS)、通过 ACK 确认的累计字节数等等 struct tcp_info {__u8 tcpi_state;__u8 tcpi_ca_state;__u8 tcpi_retransmits;__…...
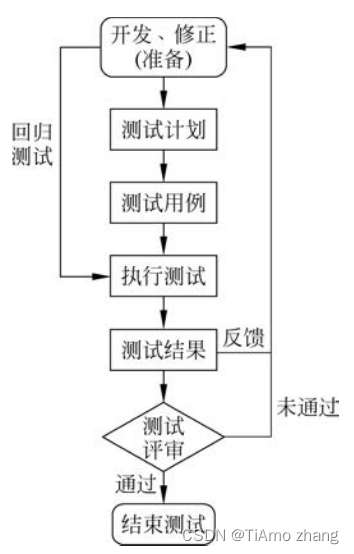
软件测试案例 | 气象探测库存管理系统的集成测试计划
将经过单元测试的模块按照设计要求连接起来,组成规定的软件系统的过程被称为“集成”。集成测试也被称为组装测试、联合测试、子系统测试或部件测试等,其主要用于检查各个软件单元之间的接口是否正确。集成测试同时也是单元测试的逻辑扩展,即…...
)
vue点击按钮重新加载页面(vue第一次加载页面点击按钮出现页面刷新问题之后一切正常)
问题描述 所开发的vue项目每次跑起来之后就会出现点击按钮后重新加载整个页面的问题,但是只会在第一次点击的时候出现,后面就不会在出现加载整个页面的情况。 原因 在form表单中使用button按钮导致form表单进行了页面刷新。button默认的“type‘submi…...
 系统设计分类)
软件工程(十一) 系统设计分类
我们知道需求规格说明书(SRS)落地之后, 就要开始着手系统设计了,看一下这个系统该如何来设计,并且如何实现。学习系统设计之前,需要先了解系统设计有哪些分类。 系统设计的分类如下 界面设计结构化设计面向对象设计(最重要)1、界面设计 界面设计也叫做人机界面设计,属于…...

数字转中文大写金额
有时候,我们需要显示中文大写金额,比如打印银行付款申请单等。 新建一个工程,加入一个标准模块在模块中加入如下代码,窗口中调用 AmountInChineseWords 函数即可。最大解析到百万亿,小数最多解析两位到分。 模块代码…...

Java——HashMap和HashTable的区别
Java——HashMap和HashTable的区别 Java HashMap和HashTable的区别1. 继承的父类2. 线程安全性3. null值问题4. 初始容量及扩容方式5. 遍历方式6. 计算hash值方式 Java HashMap和HashTable的区别 1. 继承的父类 都实现了Map、Cloneable(可复制)、Seria…...
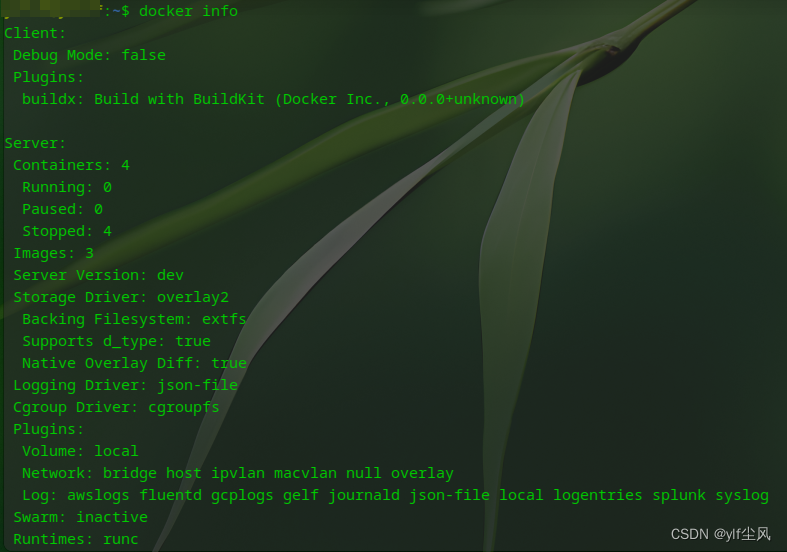
Docker去除sudo权限
Docker去除sudo权限 使用docker命令时,每次都要sudo提权,否则就会报错提示无权限。 1.查看docker用户组及成员 sudo cat /etc/group | grep docker2.添加docker用户组 sudo groupadd docker3.添加用户到docker组 sudo gpasswd -a ${USER} docker4.增…...

【ROS系统】Ubuntu22.04系统中安装ROS2系统_ubuntu 安装ros2_GoesM
【ROS系统】Ubuntu22.04系统中安装ROS2系统_ubuntu 安装ros2_GoesM Excerpt ROS仿真、专为自动驾驶研发提供的系统平台_ubuntu 安装ros2 参考博客:ROS 安装详细教程 —— Ubuntu22.0.4 LTS 安装 Part 0. 准备 首先,我们需要一个Ubuntu系统。 Part 1. …...
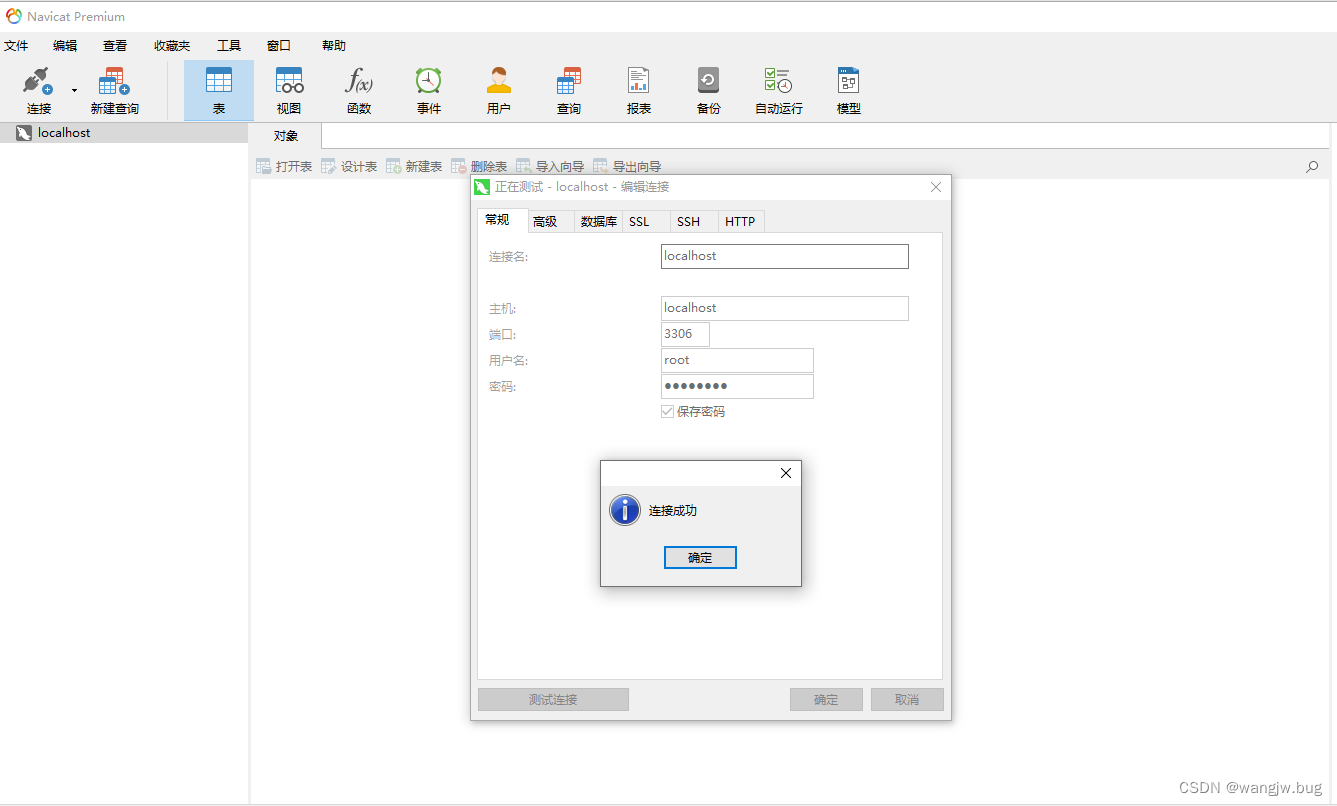
MySQL8.0.22安装过程记录(个人笔记)
1.点击下载MySQL 2.解压到本地磁盘(注意路径中不要有中文) 3.在解压目录创建my.ini文件 文件内容为 [mysql] # 设置mysql客户端默认字符集 default-character-setutf8[mysqld] # 设置端口 port 3306 # 设计mysql的安装路径 basedirE:\01.app\05.Tool…...

Python中pip和conda的爱恨情仇
在使用pip和conda时,是否也有过以下的疑惑??? 目前只总结了以下常见的几种混淆,如有学者还有其它疑惑,欢迎留言讨论,我会解答更新,帮助自己理清的同时,也帮助其他同样困…...
HTTPS协议原理
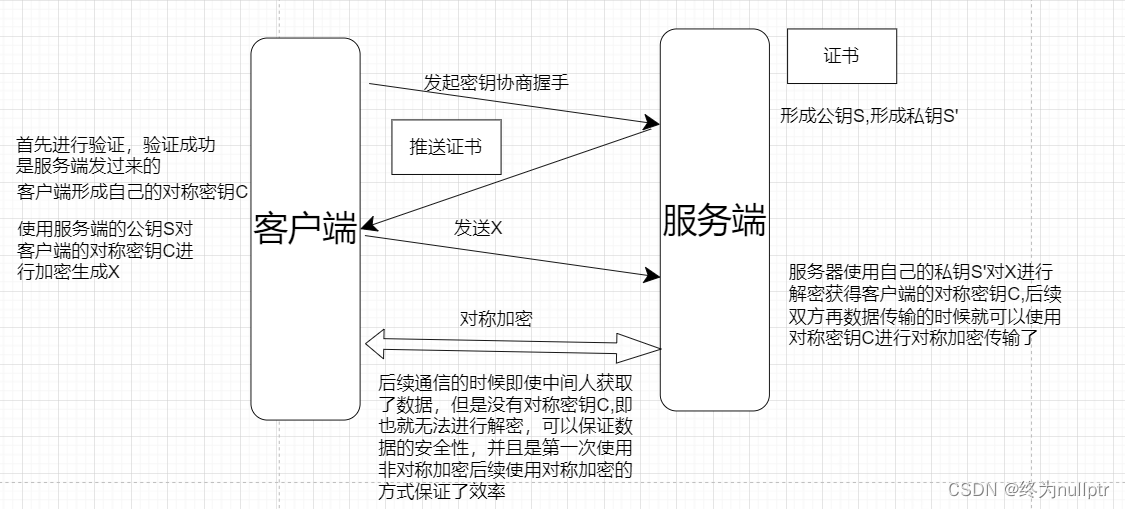
目录 前言 1.理解加密和解密 2.为什么要加密 3.常见的加密方式 3.1对称加密 3.2非对称加密 4.数据摘要和数据指纹 5. 数字签名 6.HTTPS的加密策略 6.1只使用对称加密 6.2使用非对称加密 6.2.1服务端使用非对称加密 6.2.2双方都使用非对称加密 6.3对称加密非对称加…...

C语言每日一练------Day(6)
本专栏为c语言练习专栏,适合刚刚学完c语言的初学者。本专栏每天会不定时更新,通过每天练习,进一步对c语言的重难点知识进行更深入的学习。 今日练习题关键字:整数转换 异或 💓博主csdn个人主页:小小unicorn…...
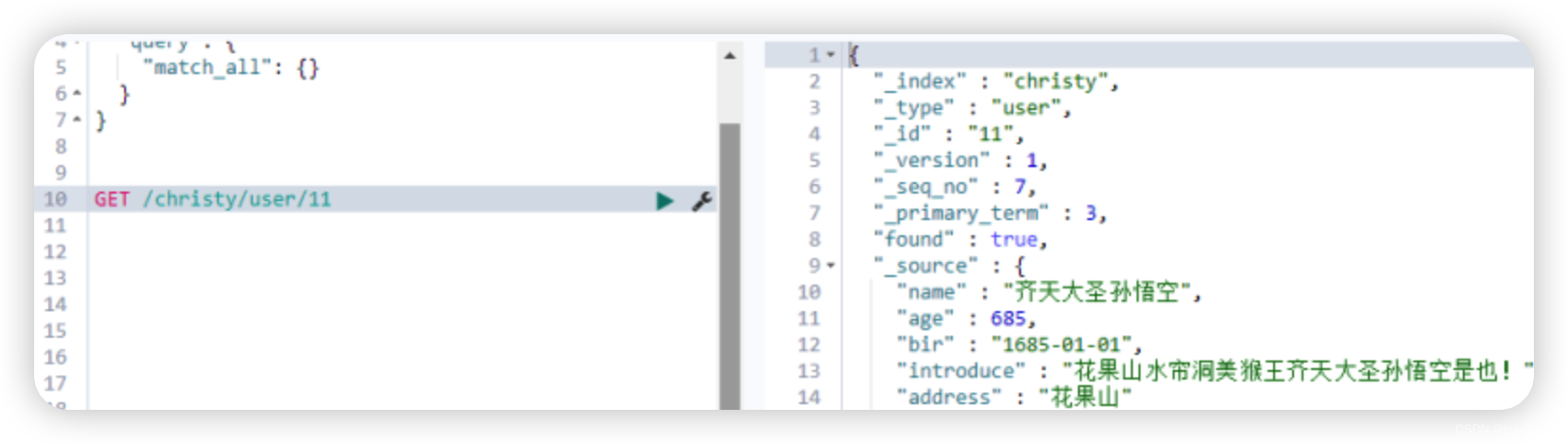
springboot中使用ElasticSearch
引入依赖 修改我们的pom.xml,加入spring-boot-starter-data-elasticsearch <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-elasticsearch</artifactId> </dependency>编写配…...
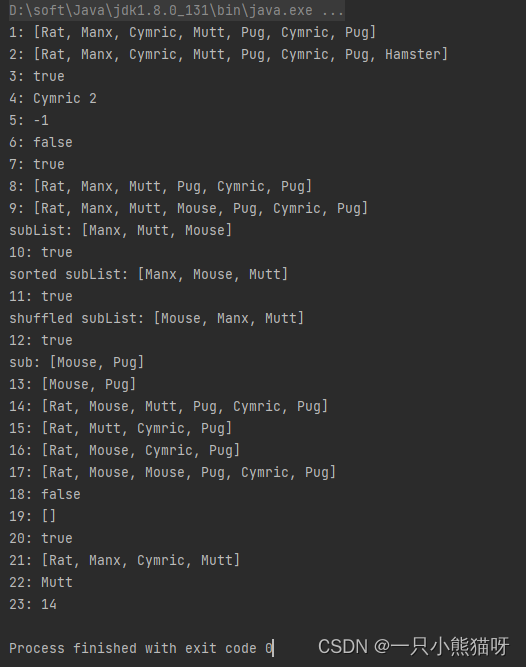
十二、集合(2)
本章概要 添加元素组集合的打印列表 List 添加元素组 在 java.util 包中的 Arrays 和 Collections 类中都有很多实用的方法,可以在一个 Collection 中添加一组元素。 Arrays.asList() 方法接受一个数组或是逗号分隔的元素列表(使用可变参数ÿ…...

人工智能在科学领域需要设立防护措施,避免对它不加批判地采用
耶鲁大学人类学研究生院主任Lisa Messeri、和普林斯顿大学的心理学家M. J. Crockett 发给《自然》期刊的论文中阐述:人工智能正在迅速加速科学产出,但也有可能缩小研究范围,削弱判断力,削弱科学家的培训方式。科学界正以惊人的速度…...

java springboot-vue社区资源共享系统 社区活动报名系统
目录同行可拿货,招校园代理 ,本人源头供货商项目概述技术栈核心功能模块系统架构设计部署方案扩展性设计项目技术支持源码获取详细视频演示 :同行可合作点击我获取源码->->进我个人主页-->获取博主联系方式同行可拿货,招校园代理 ,本人源头供货商 项目概述…...

卡梅德生物技术快报|噬菌体随机肽库筛选实战:花生过敏原 Ara h 5 模拟表位鉴定全流程
摘要本文面向生物研发、体外诊断、蛋白质工程开发者,系统讲解噬菌体随机肽库筛选过敏原模拟表位完整工程化流程:从问题分析、实验设计、关键参数到结果验证,提供可复现技术方案,基于真实研究数据,聚焦高可靠性表位筛选…...

自动化文件管理:基于Python的网盘批量处理方案
自动化文件管理:基于Python的网盘批量处理方案 【免费下载链接】BaiduPanFilesTransfers 百度网盘批量转存、分享和检测工具 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduPanFilesTransfers 在数字资源日益丰富的时代,百度网盘用户面临着批…...

合同系统功能详解:相对方管理
上一期,我们讲解了合同系统的业务功用。本期开始,我们将逐一对合同系统的核心功能进行拆解,结合实际业务场景展开详细讲解。今天,我们重点介绍合同系统中的相对方管理功能。 在实际业务落地过程中,不同企业的经营业态…...

py每日spider案例之netease搜索接口获取
import requestsheaders = {"accept": "application/json, text/plain, */*","accept-language": "en-US,en;q=0.9,zh-CN;q=0.8,zh;q=0.7","cache-control": "no-cache",...

如何通过纯JavaScript拖拽构建器实现零代码网站开发
如何通过纯JavaScript拖拽构建器实现零代码网站开发 【免费下载链接】VvvebJs Drag and drop page builder library written in vanilla javascript without dependencies or build tools. 项目地址: https://gitcode.com/gh_mirrors/vv/VvvebJs 在网站开发领域…...

qb-web测试策略:Jest单元测试与Vue组件测试最佳实践
qb-web测试策略:Jest单元测试与Vue组件测试最佳实践 【免费下载链接】qb-web A qBittorrent Web UI, write in TypeScriptVue. 项目地址: https://gitcode.com/gh_mirrors/qb/qb-web qb-web作为基于TypeScriptVue开发的qBittorrent Web UI,采用Je…...

【卷卷观察】Google I/O 炸场背后:AI 行业正在经历一场“越南战争“
Google I/O 2026 开完了,朋友圈和推特上全是"智能体时代来了"的刷屏。但说实话,我越看越觉得不对劲。不是因为 Google 发布的东西不好——Gemini Spark 确实酷,93 个 Agent 并行写操作系统也确实震撼。而是因为这种"震撼"…...

CellSpectra的创新视角:从差异表达到协调性分析
单细胞RNA测序(scRNA-seq)让我们得以在单细胞分辨率下解析基因表达模式。然而,差异表达分析仅能识别单体基因变化,难以刻画基因间的协同调控;通路富集分析无法实现个体水平的统计推断;高稀疏性则进一步制约…...