PX4之启动脚本
PX4通过rcS脚本来设定需要启动的程序,比如设备驱动、控制模块、数据通信等。rcS脚本在项目中的文件位置
ROMFS/px4fmu_common/rcS
对应硬件平台固件上的位置
/etc/init.d/rcS
启动脚本流程如下
#!/bin/sh
# PX4FMU startup script.
#
# 一些注释
## 设置默认参数
set R / #根目录
set AUTOCNF no
set FCONFIG /fs/microsd/etc/config.txt #SD卡上的设置脚本
set FEXTRAS /fs/microsd/etc/extras.txt #SD卡上的附加脚本
set FRC /fs/microsd/etc/rc.txt #SD卡上启动脚本,如果有的话运行这个脚本
set IOFW "/etc/extras/px4_io-v2_default.bin" #固件文件,如果有的话,自动刷新
set IO_PRESENT no
set LOGGER_ARGS ""
set LOGGER_BUF 8
set MAV_TYPE none #飞行器类型,这里未设定
set MIXER none
set MIXER_AUX none
set MIXER_FILE none
set MIXER_EXTRA none
set OUTPUT_MODE none
set PARAM_FILE "" #参数文件,未设定
set PWM_OUT none
set PWM_MAIN_RATE p:PWM_MAIN_RATE
set PWM_AUX_OUT none
set PWM_AUX_RATE p:PWM_AUX_RATE
set PWM_EXTRA_OUT none
set PWM_EXTRA_RATE p:PWM_EXTRA_RATE
set EXTRA_MIXER_MODE none
set RC_INPUT_ARGS ""
set SDCARD_AVAILABLE no
set SDCARD_EXT_PATH /fs/microsd/ext_autostart
set SDCARD_FORMAT no
set SDCARD_MIXERS_PATH /fs/microsd/etc/mixers
set STARTUP_TUNE 1
set USE_IO no
set VEHICLE_TYPE none#打印系统信息
ver all# 载入SD卡
if [ -b "/dev/mmcsd0" ]
thenif mount -t vfat /dev/mmcsd0 /fs/microsd #mountthenif [ -f "/fs/microsd/.format" ]thenecho "INFO [init] format /dev/mmcsd0 requested (/fs/microsd/.format)"set SDCARD_FORMAT yesrm /fs/microsd/.formatumount /fs/microsdelseset SDCARD_AVAILABLE yesfifiif [ $SDCARD_AVAILABLE = no -o $SDCARD_FORMAT = yes ]thenecho "INFO [init] formatting /dev/mmcsd0"set STARTUP_TUNE 15 # tune 15 = SD_ERROR (overridden to SD_INIT if format + mount succeeds)if mkfatfs -F 32 /dev/mmcsd0thenecho "INFO [init] card formatted"if mount -t vfat /dev/mmcsd0 /fs/microsdthenset SDCARD_AVAILABLE yesset STARTUP_TUNE 14 # tune 14 = SD_INITelseecho "ERROR [init] card mount failed"fielseecho "ERROR [init] format failed"fifiif [ $SDCARD_AVAILABLE = yes ]thenif hardfault_log checkthenset STARTUP_TUNE 2 # tune 2 = ERROR_TUNEif hardfault_log committhenhardfault_log resetfififiset PARAM_FILE /fs/microsd/params #载入成功的情况下,设置参数文件为/fs/microsd/params
fi# 查看SD卡上的启动脚本,如果有的话启动SD卡上的脚本,没有的话启动默认脚本
if [ -f $FRC ]
then. $FRC
else# 默认启动脚本# 查询MTD设备,挂载SPI-EEPROM,如果有的话设置从mtd设备载入参数if mft query -q -k MTD -s MTD_PARAMETERS -v /fs/mtd_paramsthenset PARAM_FILE /fs/mtd_paramsfi# 载入参数,如果有板载校正数据if mft query -q -k MTD -s MTD_CALDATA -v /fs/mtd_caldatathenparam load /fs/mtd_caldatafi# 从PARAM_FILE载入参数param select $PARAM_FILEif ! param importthenecho "ERROR [init] param import failed"set STARTUP_TUNE 2 # tune 2 = ERROR_TUNEparam dump $PARAM_FILEif [ -d "/fs/microsd" ]thendmesg >> /fs/microsd/param_import_fail.txt &# try to make a backup copycp $PARAM_FILE /fs/microsd/param_import_fail.bson &fi# try importing from backup fileif [ -f "/fs/microsd/parameters_backup.bson" ]thenecho "[init] importing from parameter backup"# dump current backup file contents for comparisonparam dump /fs/microsd/parameters_backup.bsonparam import /fs/microsd/parameters_backup.bsonfifiif [ $SDCARD_AVAILABLE = yes ]thenparam select-backup /fs/microsd/parameters_backup.bsonfi# 如果硬件版本为V5X或V6X,启动网络管理程序if ver hwcmp PX4_FMU_V5X PX4_FMU_V6Xthennetman update -i eth0fi# 如果自动配置不为0,重设一系列参数# SYS_AUTOCONFIG定义针对某一机型的自动参数设置,如DJI-F330, DJI-F450, 3DR SOLO等,都有一个对应的数字,具体可以查看/etc/init.d目录下的脚本,或者项目目录ROMFS/px4fmu_common/init.d/airframes目录下的脚本if param greater SYS_AUTOCONFIG 0then# Wipe out params except RC*, flight modes, total flight time, calibration parameters, next flight UUIDparam reset_all SYS_AUTO* RC* COM_FLTMODE* LND_FLIGHT* TC_* CAL_ACC* CAL_GYRO* COM_FLIGHT*set AUTOCNF yesfi# 板载架构配置脚本(可选)set BOARD_ARCH_RC_DEFAULTS ${R}etc/init.d/rc.board_arch_defaultsif [ -f $BOARD_ARCH_RC_DEFAULTS ]thenecho "Board architecture defaults: ${BOARD_ARCH_RC_DEFAULTS}". $BOARD_ARCH_RC_DEFAULTSfiunset BOARD_ARCH_RC_DEFAULTS# 板载配置脚本(可选)set BOARD_RC_DEFAULTS ${R}etc/init.d/rc.board_defaultsif [ -f $BOARD_RC_DEFAULTS ]thenecho "Board defaults: ${BOARD_RC_DEFAULTS}". $BOARD_RC_DEFAULTSfiunset BOARD_RC_DEFAULTS# 启动声调报警模块tone_alarm start# 启动数据管理模块,根据源代码注释,也包含路径点存储(waypoints storage)if param compare SYS_DM_BACKEND 1thendataman start -relseif param compare SYS_DM_BACKEND 0then# dataman start defaultdataman startfifi# 启动socket通讯和事件发送模块send_event start# 启动资源载入监控load_mon start# 启动灯闪控制模块rgbled start -X -qrgbled_ncp5623c start -X -q# 运行自动配置脚本,自动配置脚本中,根据SYS_AUTOSTART数值运行对应机型的参数配置set AUTOSTART_PATH etc/init.d/rc.autostartif ! param compare SYS_AUTOSTART 0thenif param greater SYS_AUTOSTART 1000000then# Use external startup fileif [ $SDCARD_AVAILABLE = yes ]thenset AUTOSTART_PATH etc/init.d/rc.autostart_extelseecho "ERROR [init] SD card not mounted - trying to load airframe from ROMFS"fifi. ${R}$AUTOSTART_PATHfiunset AUTOSTART_PATH# 运行SD卡上的用户配置文件,FCONFIG在前面定义,指向SD卡上的配置文件if [ -f $FCONFIG ]thenecho "Custom: ${FCONFIG}". $FCONFIGfi# 如果AUTOCNF已经设置,SYS_AUTOCONFIG置零if [ $AUTOCNF = yes ]thenparam set SYS_AUTOCONFIG 0fi# 如果设置了UAVCAN_ENABLE,启动CAN总线控制if param greater -s UAVCAN_ENABLE 0thenif uavcan startthenif param greater UAVCAN_ENABLE 2thenset OUTPUT_MODE uavcan_escfielsetune_control play errorfielseif param greater -s UAVCAN_V1_ENABLE 0thenuavcan_v1 startfifi# 检查PX4IO以及是否需要更新固件if [ -f $IOFW ]then# Check for the mini using build with px4io fw file# but not a px4IOif ver hwtypecmp V540 V560thenparam set SYS_USE_IO 0elseif px4io checkcrc ${IOFW}thenset IO_PRESENT yeselse# tune Program PX4IOtune_control play -t 16 # tune 16 = PROG_PX4IOif px4io update ${IOFW}thenusleep 10000tune_control stopif px4io checkcrc ${IOFW}thentune_control play -t 17 # tune 17 = PROG_PX4IO_OKset IO_PRESENT yeselsetune_control play -t 18 # tune 18 = PROG_PX4IO_ERRfielsetune_control stopfifififiif param compare -s SYS_USE_IO 1thenset USE_IO yesfiif [ $USE_IO = yes -a $IO_PRESENT = no ]thenecho "PX4IO not found"set STARTUP_TUNE 2 # tune 2 = ERROR_TUNEfi# 启动RC更新(把RC输入映射到手动控制)rc_update start#启动手动控制模块manual_control start# 启动传感器程序,启动commander模块if param greater SYS_HITL 0thenset OUTPUT_MODE hilsensors start -hcommander start -h# disable GPSparam set GPS_1_CONFIG 0# start the simulator in hardware if neededif param compare SYS_HITL 2thensih startfielseset BOARD_RC_SENSORS ${R}etc/init.d/rc.board_sensorsif [ -f $BOARD_RC_SENSORS ]thenecho "Board sensors: ${BOARD_RC_SENSORS}". $BOARD_RC_SENSORSfiunset BOARD_RC_SENSORS. ${R}etc/init.d/rc.sensorsif param compare -s BAT1_SOURCE 2thenesc_battery startfiif ! param compare BAT1_SOURCE 1thenbattery_status startficommander startfi# 启动磁偏估计if param compare -s MBE_ENABLE 1thenmag_bias_estimator startfi# 启动摄像头相关程序if param greater -s TRIG_MODE 0thencamera_trigger startcamera_feedback startfi# 启动板载mavlink流(可选)set BOARD_RC_MAVLINK ${R}etc/init.d/rc.board_mavlinkif [ -f $BOARD_RC_MAVLINK ]thenecho "Board mavlink: ${BOARD_RC_MAVLINK}". $BOARD_RC_MAVLINKfiunset BOARD_RC_MAVLINK# 启动UART/串口驱动程序. ${R}etc/init.d/rc.serialif [ $IO_PRESENT = no ]then# Must be started after the serial config is readrc_input start $RC_INPUT_ARGSfi# 启动PPS输入驱动if param greater -s PPS_CAP_ENABLE 0thenpps_capture startfi# 启动摄像头拍摄模块if param greater -s CAM_CAP_FBACK 0thenif camera_capture startthencamera_capture onfifi# 运行rc.vehicle_setup# rc.vehicle_setup脚本中运行接口程序(rc.interface)和飞行器应用程序(rc.mc_apps)(以多轴飞行器为例)# 其中rc.interface中启动电机PWM控制程序pwm_out和载入输出配置mixer文件,类似# pwm_out start - 启动PWM输出程序# mixer load ... - 载入PWM输出配置文件# rc.mc_apps启动飞行器相关主要控制程序,包括# attitude_estimate_q - 姿态估计# ekf2 - 卡尔曼滤波# mc_att_control - 姿态控制# mc_rate_control - 速度控制# mc_pos_control - 位置控制# land_detector - 着陆检测# 等. ${R}etc/init.d/rc.vehicle_setup# 播放启动提示音param compare CBRK_BUZZER 782090if [ "$?" != "0" -o "$STARTUP_TUNE" != "1" ]thentune_control play -t $STARTUP_TUNEfi# 启动导航模块navigator start# 启动热校正(thermal calibration)程序. ${R}etc/init.d/rc.thermal_cal# 启动vmount, px4flow, bst等模块if param greater -s MNT_MODE_IN -1thenvmount startfiif param compare -s SENS_EN_PX4FLOW 1thenpx4flow start -Xfi# Blacksheep telemetryif param compare -s TEL_BST_EN 1thenbst start -Xfi# 启动陀螺仪滤波、校正等相关程序if param compare -s IMU_GYRO_FFT_EN 1thengyro_fft startfiif param compare -s IMU_GYRO_CAL_EN 1thengyro_calibration startfi# 启动附加板载脚本set BOARD_RC_EXTRAS ${R}etc/init.d/rc.board_extrasif [ -f $BOARD_RC_EXTRAS ]thenecho "Board extras: ${BOARD_RC_EXTRAS}". $BOARD_RC_EXTRASfiunset BOARD_RC_EXTRAS# 启动SD卡俯加脚本if [ -f $FEXTRAS ]thenecho "Addons script: ${FEXTRAS}". $FEXTRASfi# 启动数据记录. ${R}etc/init.d/rc.logging# 启动AUTOSTART后处理程序if ! param compare SYS_AUTOSTART 0then. ${R}etc/init.d/rc.autostart.postfi# 启动板载bootloader升级程序set BOARD_BOOTLOADER_UPGRADE ${R}etc/init.d/rc.board_bootloader_upgradeif [ -f $BOARD_BOOTLOADER_UPGRADE ]thensh $BOARD_BOOTLOADER_UPGRADEfiunset BOARD_BOOTLOADER_UPGRADE
fi# 清除参数设置
unset R
unset AUTOCNF
unset FCONFIG
unset FEXTRAS
unset FRC
unset IO_PRESENT
unset IOFW
unset LOGGER_ARGS
unset LOGGER_BUF
unset MAV_TYPE
unset MIXER
unset MIXER_AUX
unset MIXER_FILE
unset OUTPUT_MODE
unset PARAM_FILE
unset PWM_AUX_OUT
unset PWM_AUX_RATE
unset PWM_MAIN_RATE
unset PWM_OUT
unset PWM_EXTRA_OUT
unset PWM_EXTRA_RATE
unset RC_INPUT_ARGS
unset SDCARD_AVAILABLE
unset SDCARD_EXT_PATH
unset SDCARD_FORMAT
unset SDCARD_MIXERS_PATH
unset STARTUP_TUNE
unset USE_IO
unset VEHICLE_TYPE# 通知mavlink启动完成
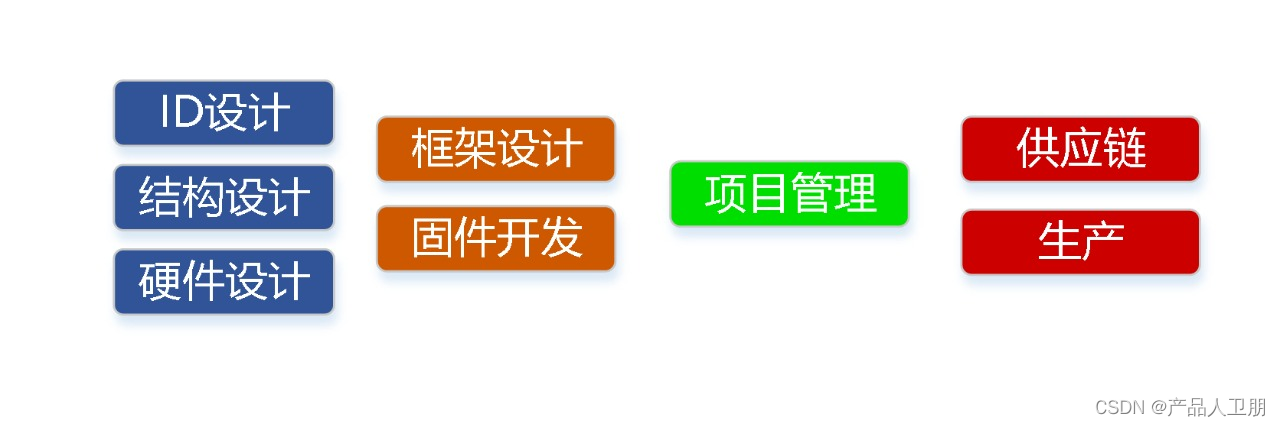
mavlink boot_complete启动的过程按图示大致如下(当前版本)



其中黄色部分为SD卡自定义脚本,蓝色部分为控制相关程序,紫色部分为机型相关自动配置程序,绿色部分为算法程序。
总结主要的点有:
1 程序启动首先Load SD卡,如果SD卡上有自定义启动脚本,就运行SD卡上的脚本,如果没有(默认情况),运行板载自动启动流程
2 机型相关的参数配置通过SYS_AUTOSTART值来定义,通过设置这个值,可以自动载入某一机型对应的参数(如DJI 450,3DR SOLO等)
3 飞行控制相关程序在commander,rc.vehicle_setup,navigator等模块或脚本启动,主要的飞控相关模块有
rc_input - 遥控输入
commander - 命令处理
navigator - 导航
pos_control - 位置控制
att_control - 姿态控制
pwm_out - 电机输出
相关文章:
PX4之启动脚本
PX4通过rcS脚本来设定需要启动的程序,比如设备驱动、控制模块、数据通信等。rcS脚本在项目中的文件位置 ROMFS/px4fmu_common/rcS 对应硬件平台固件上的位置 /etc/init.d/rcS 启动脚本流程如下 #!/bin/sh # PX4FMU startup script. # # 一些注释 ## 设置默认参…...
Java零基础入门到精通(持续更新中)
打开CMD命令窗口 WINR输入cmd 常用cmd命令代码 切换磁盘 E: 回车即可切换到e盘查看当前路径下的所有内容 dir进入目录 cd test回退到上一级目录 cd..进入多级目录 cd test\index\aaa回退到磁盘目录 cd \清屏 cls关闭命令行窗口 exit小例子:使用命令行窗口…...
:Bilibili视频缓存 m4s音视频合并 shell脚本)
杂七杂八(12):Bilibili视频缓存 m4s音视频合并 shell脚本
视频目录结构如下: 267132000/ 267132000/c_1015740000/ 267132000/c_1015740000/entry.json 267132000/c_1015740000/80/ 267132000/c_1015740000/80/audio.m4s 267132000/c_1015740000/80/video.m4s267132000/c_1015740011/ 267132000/c_1015740011/entry.json 2…...

Qt 某光谱仪程序开发
某光谱仪程序开发 文章目录某光谱仪程序开发摘要安装驱动注册COM组件导出.h和.cpp在Qt 中添加源文件开发打包程序关键字: Demo、 Qt、 COM、 dumpcpp、 C摘要 今天接到一个临时小任务,写一个的项目子模块的Demo,以供和专家们交流一下项目技…...

蛋白质组学技术与常见分析培训班火热招生中!
什么是蛋白质组学? 蛋白质组学(proteomics),是以蛋白质组为研究对象,研究细胞、组织或生物体蛋白质组成及其变化规律的科学。包括蛋白质的表达水平,翻译后修饰,蛋白与蛋白相互作用等研究内容,集中于动态描述…...
唤醒手腕 Java 后端 Springboot 框架结合 socketio 学习笔记
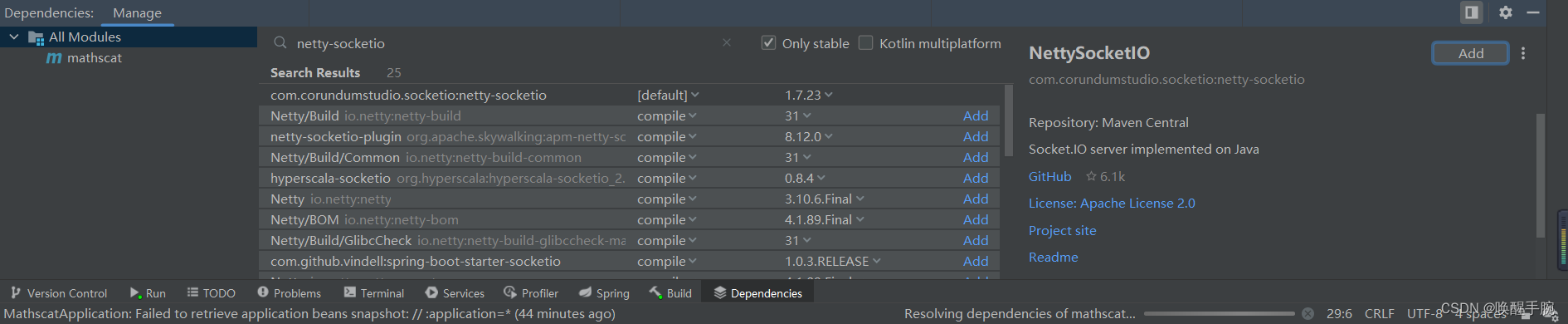
socketio 安装配置 Socket.IO是一个完全由JavaScript实现、基于Node.js、支持WebSocket的协议用于实时通信、跨平台的开源框架,它包括了客户端的JavaScript和服务器端的Node.js。 Socket.IO除了支持WebSocket通讯协议外,还支持许多种轮询(P…...
C++入门:内联函数、auto关键字、基于范围for循环及指针空值nullptr
目录 一. 内联函数 1.1 内联函数的概念 1.2 内联函数的特性 1.3 内联函数和宏的优缺点对比 二. auto关键字(C11) 2.1 auto的功能 2.2 auto在使用时的注意事项 三. 基于范围的for循环(C11) 四. 指针空值nullptr(…...

Python遗传算法
1 人工智能概述 2020中国人工智能产业年会在苏州召开,会上发布的《中国人工智能发展报告2020》显示,过去十年(2011-2020) ,中国人工智能专利申请量达389571件,占全球总量的74.7%,位居世界第一。 报告指出,…...
GEE学习笔记 六十四:绿色中国报告(个人版)
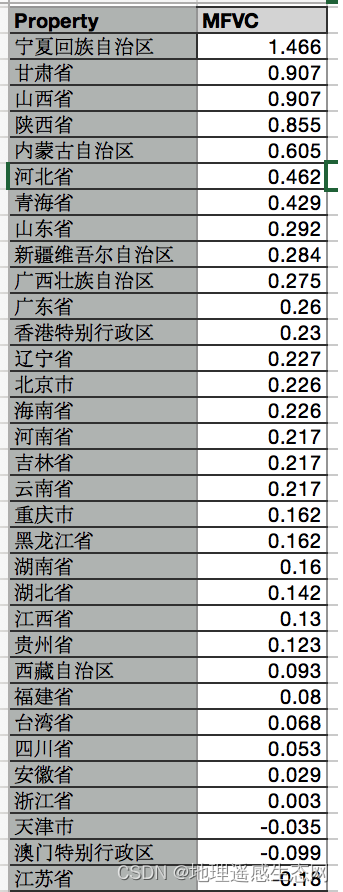
2019年上半年在遥感圈里最火的一篇文章莫过于这篇《China and India lead in greening of the world through land-use management》(China and India lead in greening of the world through land-use management | Nature Sustainability),…...
【Kubernetes】【十八】数据存储 高级存储 配置存储
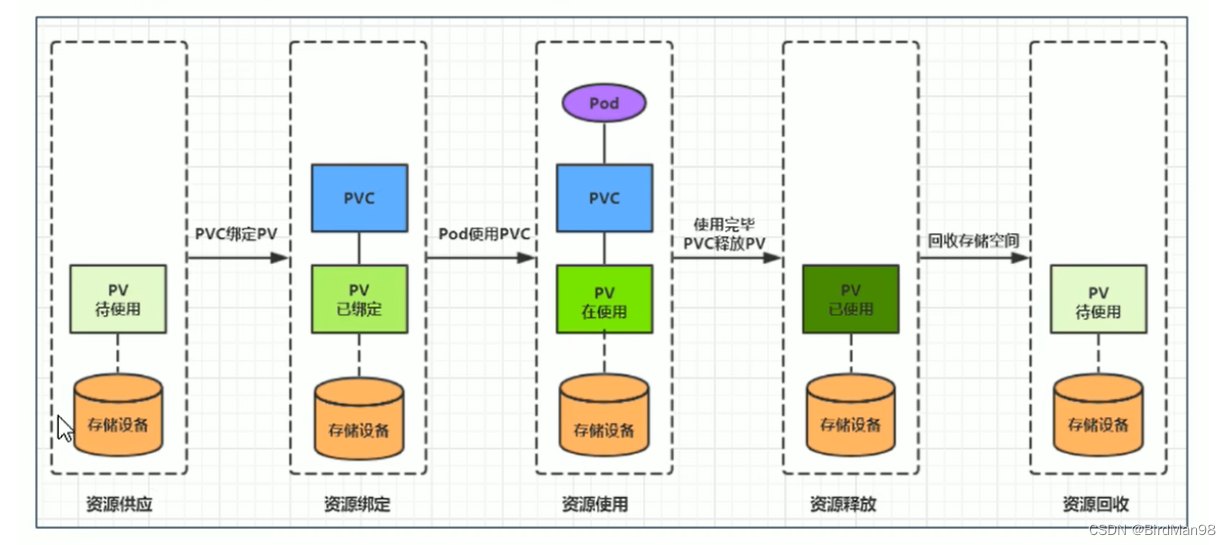
高级存储 PV和PVC 前面已经学习了使用NFS提供存储,此时就要求用户会搭建NFS系统,并且会在yaml配置nfs。由于kubernetes支持的存储系统有很多,要求客户全都掌握,显然不现实。为了能够屏蔽底层存储实现的细节,方便用…...
传输层TCP与UDP协议
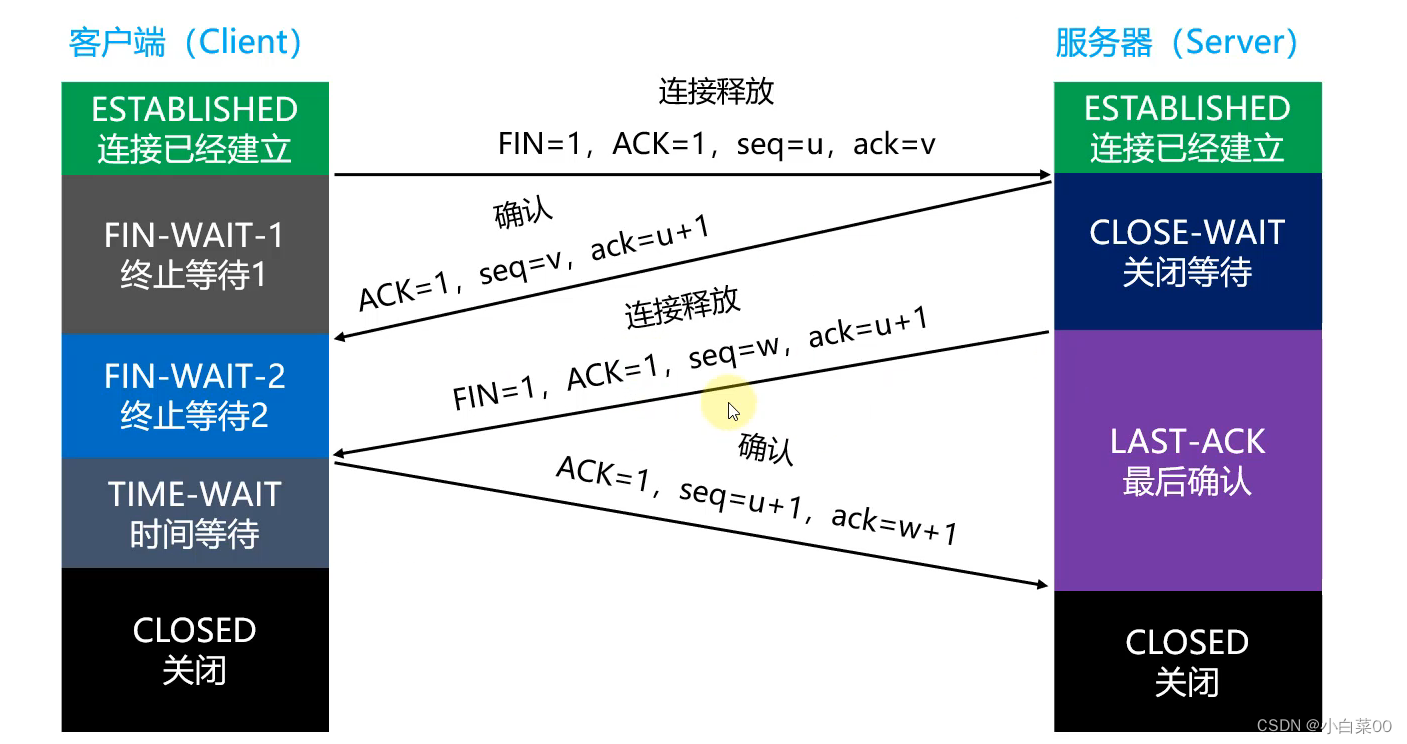
目录 传输层 传输层功能 传输层所提供的服务 传输层的两个协议 TCP协议与UDP协议 端口 端口分类 IP地址和端口的关系 UDP协议 前言: UDP报文格式 检验和的伪首部 伪首部内容 TCP协议 TCP报文格式 TCP协议数据段的理解 TCP的伪首部 伪首部内容 标…...

字节数组的通俗解释
1.字节是通过网络传输信息(或在硬盘或内存中存储信息)的单位。2.在ASCII码中,一个英文字母(不分大小写)占一个字节的空间,一个中文汉字占两个字节的空间。注意:utf-8码中一个汉字占三个字节&…...
硬件学习 软件Cadence day06 原理图网表导入PCB (过程和操作的错误),开始的画板
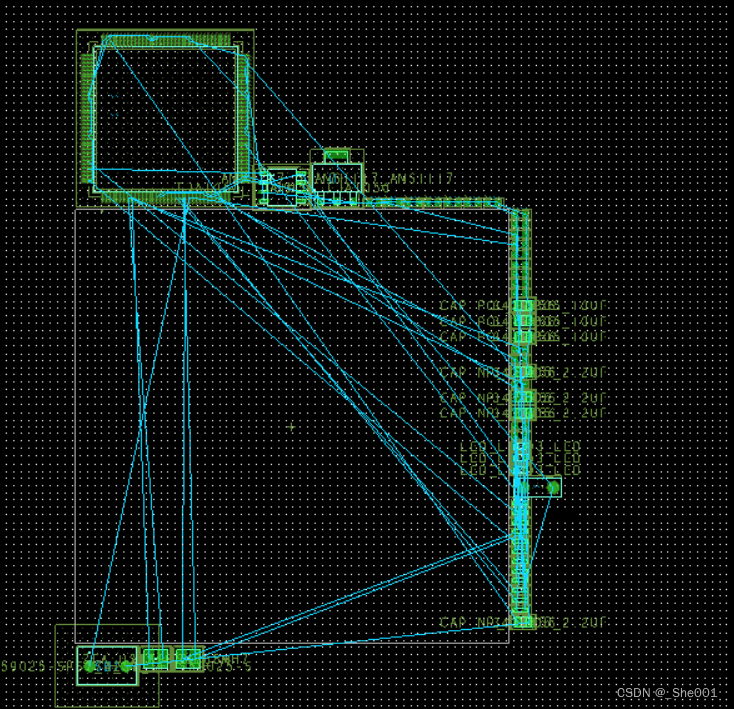
1.新建一个制作芯片的工程 1.打开 File ->New 2.填写信息,设置路径 2.原理图的网表导入 1.打开这个窗口 File -> import ->Logic.. 2.确定信息 3.解决网表导入时出现的错误 1. 第一个案列 (没有找到文件 也是这个) 比如说: WARNING(…...

OCT 医学图像分类
目录1. OCT 图像分类2. OCT图像数据集3. OCT图像预处理4. 特征提取5. 实验结果及分析github地址: https://github.com/aishangcengloua/OCT_Classification 1. OCT 图像分类 视网膜光学相干断层扫描(OCT)是一种成像技术,用于捕获活体患者视网膜的高分辨率横截面。…...

华为OD机试 - 合并数组 | 机试题算法思路 【2023】
最近更新的博客 华为OD机试 - 简易压缩算法(Python) | 机试题算法思路 【2023】 华为OD机试题 - 获取最大软件版本号(JavaScript) 华为OD机试 - 猜字谜(Python) | 机试题+算法思路 【2023】 华为OD机试 - 删除指定目录(Python) | 机试题算法思路 【2023】 华为OD机试 …...

前端开发页面样式通用约定法则
代码组织 以组件为单位组织代码段;制定一致的注释规范;组件块和子组件块以及声明块之间使用一空行分隔,子组件块之间三空行分隔;如果使用了多个 CSS 文件,将其按照组件而非页面的形式分拆,因为页面会被重组,而组件只会被移动;良好的注释是非常重要的。请留出时间来描述…...
向上跳空缺口选股公式,选出回补后再启动的标的
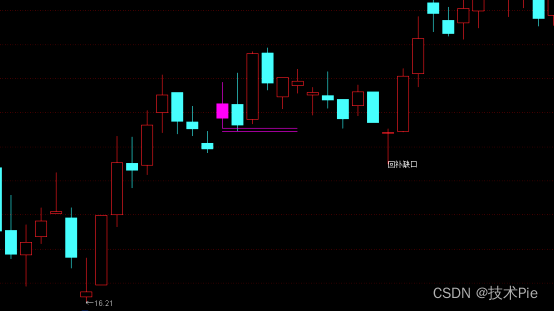
一、向上跳空缺口选股公式 思路:先找出缺口,缺口前后有两根K线,缺口低价是前一根K线的最高价,缺口高价是后一根K线的最低价。(如上图)收盘价低于缺口低价,即实现缺口回补。回补缺口之后…...
【IoT】做短视频之前,你需要先做好内容定位
现在做内容无疑要从垂直领域入手,否则你就很难出圈。 干货类或者说垂直领域方向的内容,往往都偏向于枯燥,并且会涉及很多专业性的名词,读者理解起来会困难很多,阅读的兴趣也自然会降低。 这也是笔者个人开始做短视频…...

苏宁基于 AI 和图技术的智能监控体系的建设
汤泳,苏宁科技集团智能监控与运维产研中心总监,中国商业联合会智库顾问,致力于海量数据分析、基于深度学习的时间序列分析与预测、自然语言处理和图神经网络的研究。在应用实践中,通过基于 AI 的方式不断完善智能监控体系的建设&a…...
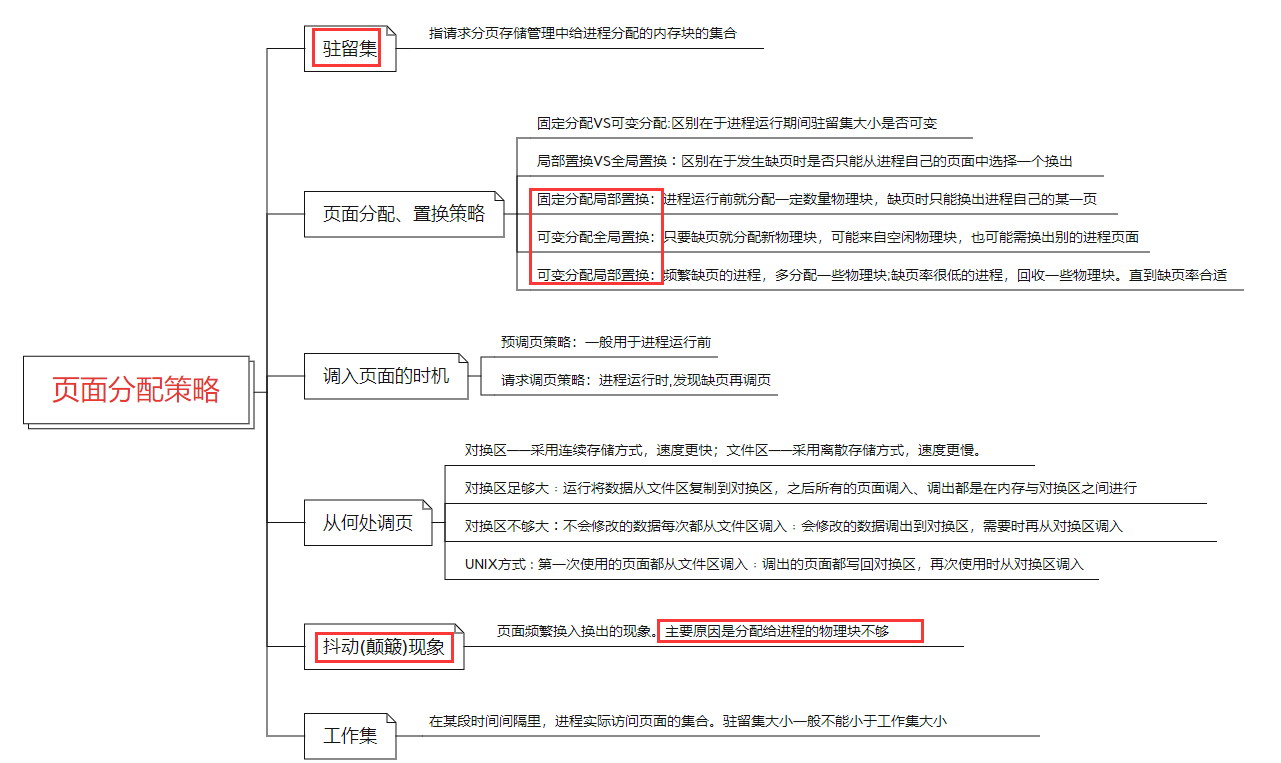
3、内存管理
文章目录1、内存的基础知识1.1、什么是内存?1.2、进程的运行原理--指令1.3、逻辑地址 & 物理地址1.4、从写程序到程序运行1.5、装入模块到运行1.6、装入的三种方式--绝对装入1.7、装入的三种方式--静态重定位1.8、装入的三种方式--动态重定位(重定位…...

零基础玩转AutoGLM-Phone-9B:图文语音多模态AI,5分钟快速部署指南
零基础玩转AutoGLM-Phone-9B:图文语音多模态AI,5分钟快速部署指南 1. AutoGLM-Phone-9B简介 1.1 什么是AutoGLM-Phone-9B AutoGLM-Phone-9B是一款专为移动设备优化的多模态AI模型,它能同时处理文字、图片和语音三种信息。想象一下…...

忍者像素绘卷惊艳作品集:16-Bit复古美学+火之意志主题像素艺术展
忍者像素绘卷惊艳作品集:16-Bit复古美学火之意志主题像素艺术展 1. 像素艺术的革命性突破 忍者像素绘卷代表了当前像素艺术生成技术的巅峰之作。这款基于Z-Image-Turbo深度优化的图像生成工作站,成功将传统忍者文化与现代AI技术完美融合,创…...

OpenClaw浏览器自动化:千问3.5-27B驱动智能检索与内容聚合
OpenClaw浏览器自动化:千问3.5-27B驱动智能检索与内容聚合 1. 为什么需要浏览器自动化助手 作为一个经常需要做市场调研的技术人,我过去总是陷入这样的循环:打开十几个浏览器标签页,在不同平台间反复切换,手动复制粘…...

有了这个Python备忘录,代码拿来即用
这段时间代码写的少了,周末用python写一个小爬虫,却发现连线程的一些方法都不记得了,还得百度查教程。工作越忙,记性越差,发现我疏远了代码,代码也疏远了我。 PS:对于小白来说自学也不是件容易…...
)
电机轴承异响?5分钟教你用振动分析仪定位故障(附实测案例)
电机轴承异响诊断实战:振动分析仪操作全流程解析 轴承异响是工业现场最常见的电机故障之一,但很多维护工程师面对"嗡嗡"声或"咔嗒"响往往无从下手。上周某化工厂的水泵电机就因轴承早期磨损未被及时发现,导致整机报废&am…...
:37处关键宏定义、12个GC阈值参数、8类对象内存布局差异)
【独家首发】CPython内存管理策略白皮书(基于v3.9–v3.13源码比对):37处关键宏定义、12个GC阈值参数、8类对象内存布局差异
第一章:CPython内存管理策略全景概览CPython 作为 Python 官方解释器,其内存管理机制融合了引用计数、循环垃圾回收(GC)与分代回收策略,形成一套兼顾实时性与鲁棒性的综合体系。理解该机制对诊断内存泄漏、优化对象生命…...

Frappe-Gantt 甘特图进阶实战:从核心功能到企业级定制
1. Frappe-Gantt 甘特图在企业级项目中的核心价值 第一次接触Frappe-Gantt是在去年一个跨部门协作的电商大促项目中。当时我们需要一个能直观展示各环节时间节点的工具,试过几个商业软件后,最终选择了这个开源的轻量级解决方案。它最吸引我的地方在于——…...

evive嵌入式平台:集成示波器与函数发生器的Arduino Mega开发系统
1. evive嵌入式平台技术解析:面向教育与工程调试的全功能Arduino Mega开发系统evive是一个以Arduino Mega 2560为核心控制器的开源嵌入式硬件平台,专为创客教育、实验教学、原型验证与嵌入式系统调试而设计。其核心价值不在于提供更高主频或更复杂外设&a…...
)
从脉冲到CAN总线:一文搞懂Emm42 V5.0步进闭环驱动的四种控制方式(含Arduino/PLC接线示例)
从脉冲到CAN总线:Emm42 V5.0步进闭环驱动的四种控制方式深度解析 在工业自动化和嵌入式开发领域,步进电机的精确控制一直是工程师们关注的重点。Emm42 V5.0步进闭环驱动器作为新一代高性能驱动解决方案,凭借其丰富的控制接口和先进的FOC矢量…...

2026最权威的五大AI辅助写作神器解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 随着人工智能技术发展得格外迅猛,学术领域对于AI相关论文的需求增长得越来越快。…...