PX4之代码结构
PX4开源飞控是目前主流的开源飞控项目,被很多公司作为飞控开发的参考。也广泛被用于现在流行的evtol验证机的飞控,进行初步的飞行验证。可能大多数AAM以及UAM都离不开PX4。
项目代码可以从github下载
$ git clone --recursive GitHub - PX4/PX4-Autopilot: PX4 Autopilot Software
这里采用–recursive选项,因为PX4项目包含很多子项目,可以同步下载,或者采用
$ git clone https://github.com/PX4/PX4-Autopilot
$ git submodule update --init --recursive
分步下载代码库和子代码库,如果有github连接不稳定的情况,可以多次执行git submodule update来下载所有的子代码库。
项目代码结构大致如下
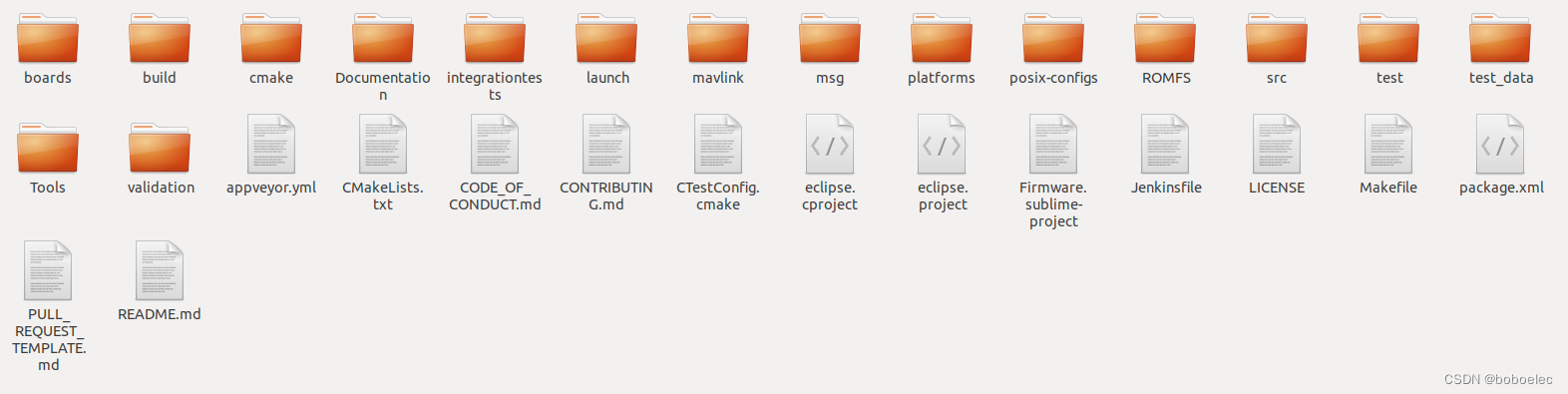
其中主要的目录有
1 boards
各种飞控硬件平台的配置文件
2 build
编译产生的目录,make之后生成的文件放置在这个目录
3 cmake
cmake编译配置目录
4 Documentation
开发者文档目录,包括代码说明等
5 launch
仿真环境用到的文件,包括ROS节点配置等
6 mavlink
通讯协议文件,定义和实现PX4与地面站之间的通讯协议。
7 msg
uORB消息定义文件,定义PX4程序之间通讯的消息格式。
8 platforms
系统平台实现的文件,包括PX4采用的Nuttx操作系统的源代码。
9 ROMFS
系统启动调用的脚本,ROMFS\px4fmu_common\ini.d\rcS是启动脚本,rcS中又调用rc.sensors,rc.mc_apps等文件。
rcS:最先启动的脚本,负责挂载SD,启动uORB、配置系统参数等。
rc.sensors:启动传感器驱动。
rc.mc_apps:启动上层应用,如commander(指令处理)、att_control(姿态控制)、pos_control(位置控制)等。
10 src
源代码目录,包含驱动、测试示例、模块实现等源代码。
10.1 drivers
包含了飞控硬件系统中使用的所有驱动代码。
10.2 examples
PX4系统给的一些简单的实例,为了便于开发者做二次开发调试测试使用。如px4_simple_app,示例了如何通过uORB获取需要的数据。
10.3 lib
包含一些标准库,如矩阵运算、加密/解密、PID算法等
10.4 modules
包含所有上层应用的模块实现,PX4的上层程序都是通过模块的形式来运行(类似于ROS里面的节点),每一个模块订阅和发布uORB信息。模块包括姿态解算、姿态控制、位置控制、命令处理(commander)等。其中commander是实现整个任务模式调度的代码,包括pixhawk灯显控制、飞行模式切换、上锁解锁等。下面是其中一些module的介绍:
attitude_estimator_ekf:采用EKF算法实现的姿态估计
attitude_estimator_q: 使用mahony的互补滤波算法实现姿态解算。
mc_att_control:即multi-copter attitude control,多轴飞行器的姿态控制算法实现,主要就是姿态的内外环PID控制,外环角度控制,内环角速度控制。
mc_pos_control: multi-copter position control,多轴飞行器的位置控制算法实现,主要是位置的内外环PID控制,外环速度控制,内环加速度控制。
commander: 整个系统的任务调度,包括命令处理、事件处理、飞行模式切换等。
land_detector: 飞行过程中使用land模式降落或者落地时的落地监测部分,内部会监测Z轴速度和加速度等。
local_position_estimator: 常说的LPE算法实现位置解算。
mavlink: 和地面站通信的通信协议,结合地面站QGC源码配合修改,或者仅仅调用mavlink内部的API接口,即可通过无线信号将所需的数据显示在地面站QGC上,此方法是一种实时监测目标数据的方法。
logger: 关于log日志的读写函数。
飞控固件的生成由make来实现,如
$ make px4_fmu-v5_default #v5默认
$ make px4_sitl_default gazebo #gazebo仿真
总结
整个代码实现主要涉及的包含:
platforms - 系统实现,系统底层实现,如分时控制,多线程调度,消息机制等
src/drivers - 驱动实现,设备驱动,如陀螺仪/加速度计、GPIO、I2C等硬件底层实现
src/modules - 应用实现,控制模块、任务调度等
ROMFS/px4fmu_common/ini.d/rcS - 启动脚本,里面指定了启动哪些程序、哪些模块
Makefile - 系统编译生成的配置
研究整个项目的生成和运行可以了解rcS,Makefile等编译生成文件和启动脚本,
了解系统底层实现可以看platforms,src/drivers等目录内容,
了解飞行控制的实现和算法主要查看src/modules中的内容。
相关文章:
PX4之代码结构
PX4开源飞控是目前主流的开源飞控项目,被很多公司作为飞控开发的参考。也广泛被用于现在流行的evtol验证机的飞控,进行初步的飞行验证。可能大多数AAM以及UAM都离不开PX4。 项目代码可以从github下载 $ git clone --recursive GitHub - PX4/PX4-Autopil…...

【C++11】可变参数模板(函数模板、类模板)
在C11之前,类模板和函数模板只能含有固定数量的模板参数。C11增强了模板功能,允许模板定义中包含0到任意个模板参数,这就是可变参数模板。可变参数模板的加入使得C11的功能变得更加强大,而由此也带来了许多神奇的用法。 可变参数模…...

centos安装高版本cmake
之前centos版本为cmake version 2.8.12.2采用yum remove卸载后重装还是这个版本,看来centos下面就是这个最新了,这说明centos煞笔。于是自己下载cmake包,然后安装。 官方cmake链接地址(3.16)(其他版本自己找,链接给你了) 1,wget下载 2,解压: tar -zxf cmake-3.16.0.…...
重温一下C#的时间类型,并简单写一个定时器功能
🎉🎉 时间是一个非常抽象的概念,本篇文章我们不深究目前电脑上的时候是如何保持全网同步。主要是讲讲在使用C#编程语言里的时间类型。最后使用定时任务简单写一个提醒功能,比如:每天10点准时打开一次csdn首页ÿ…...

MYSQL查询语句执行顺序
SQL语句定义的顺序 (1) SELECT (2)DISTINCT <select_list> (3) FROM <left_table> (4) <join_type> JOIN <right_table> (5) ON <join_condition> (6) WHERE <where_condition> (7) GROUP BY <group_by_list> (8) WITH {C…...

总结:电容在电路35个基本常识
1 电压源正负端接了一个电容,与电路并联,用于整流电路时,具有很好的滤波作用,当电压交变时,由于电容的充电作用,两端的电压不能突变,就保证了电压的平稳。 当用于电池电源时,具有交流…...
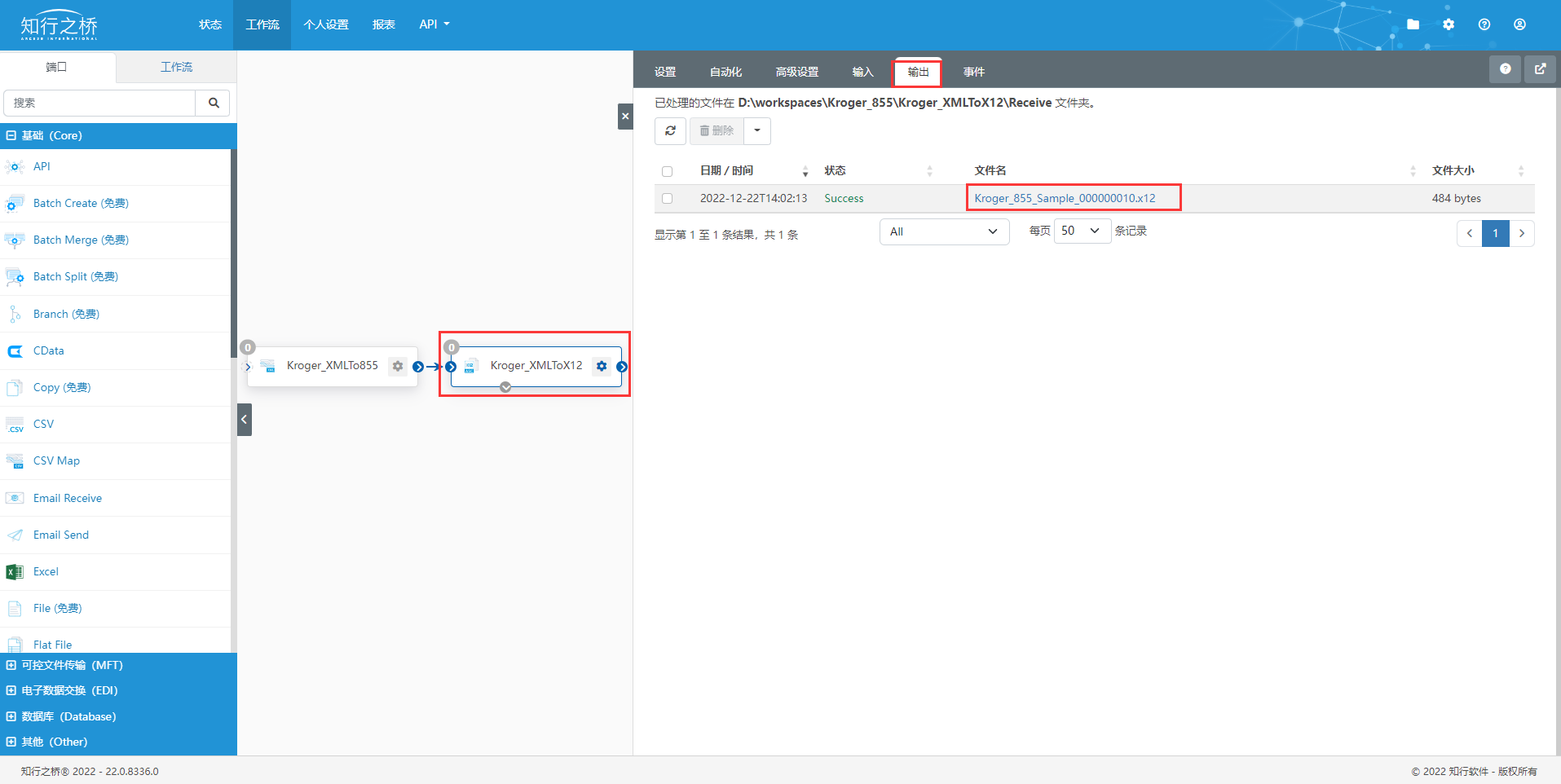
Kroger EDI 855 采购订单确认报文详解
本文着重讲述Kroger EDI项目中,供应商发给Kroger的X12 855EDI 规范报文(采购订单确认)解读。 在此前的文章如何读懂X12报文中,我们对X12已经做了详细的介绍,大家可以以此为基础,深入了解855采购订单确认报…...
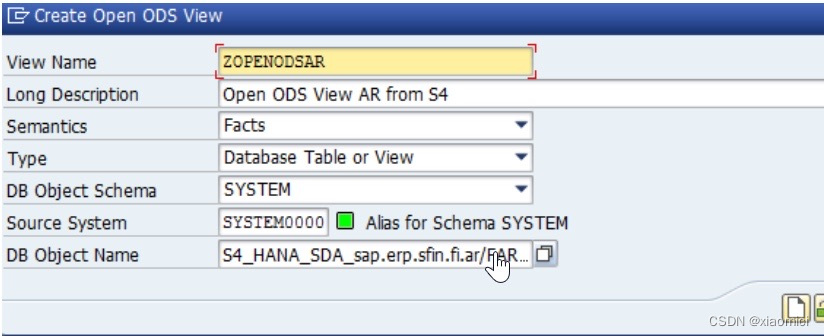
HANA SDA-远程数据源访问
我们需要把其他系统的数据拿过来,到BW里和财务的数据集成。 HANA SDA就是不复制数据,建立虚拟表(virtual table)来映射到远程数据源。通过这个虚拟表访问其他系统的数据。 对虚拟表的操作现在也可以查询,更新ÿ…...

【AUTOSAR】:OS-Hook
OS-Hook OS-HookPINIC类型1、Os_ErrKernelPanic1.1、Os_HookCallPanicHook1.1.1、OS_PANICHOOK1.1.1.1、Os_PanicHook1.1.1.2、Os_Hal_CoreFreezeOs_Hal_NOPOS-Hook 延伸阅读 延伸阅读 PINIC类型 1、Os_ErrKernelPanic...
Open3d入门
目录 点云数据 1 主成分分析 1.1 Method 1.2 Results 2 表面法线估计 2.1 Method 2.2 Results 3 体素网格下采样 3.1 Method 3.2 Results 点云数据 常用数据下载(免积分) 1 主成分分析 1.1 Method 对点云进行主成分分析(PCA&…...
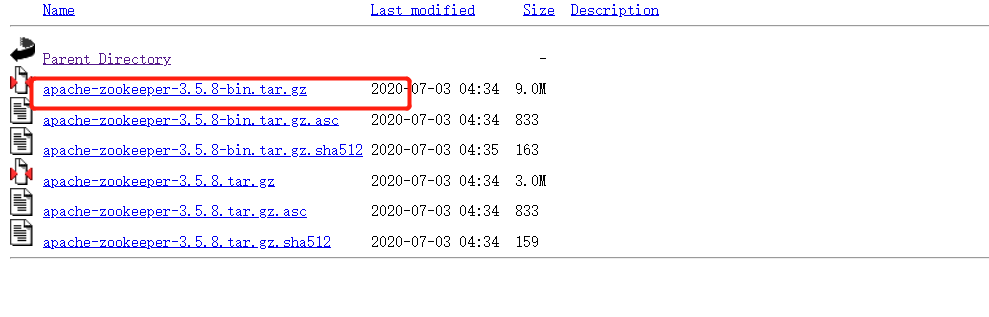
linux部署zookeeper
linux部署zookeeper 1、单机部署zk ZooKeeper服务器是用Java创建的,它需要在JVM上运行,所以需要使用JDK1.6及以上版本,一般都是jdk1.8。 选择自己安装本地的jdk,而不是centos自带的openjdk。 查看本地安装的jdk: j…...

Junit4升级Junit5汇总
Junit4升级Junit5汇总目录MockMvcBuildersUnnecessaryStubbingException目录 记录Junit4升级到Junit5中遇到的问题和结局方案 MockMvcBuilders 问题: 将Junit4的RunWith和Rule都改成ExtendWith后出现setup函数中MockMvcBuilders的参数不正确 ExtendWith({Spring…...
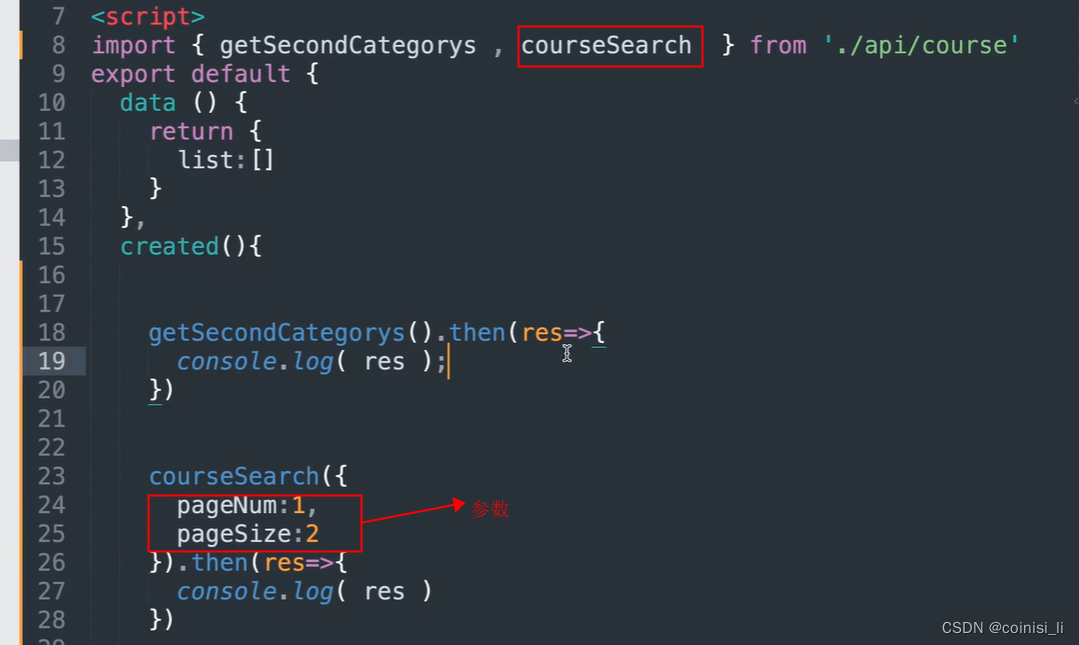
Axios二次封装和Api的解耦
目录 一、axios三种基本写法 二、axios的二次封装 三、Api的解耦 一、axios三种基本写法 1)get方法(是最简单的): 写法二: 2)post: 3)axios请求配置 默认是get请求,如…...
)
SpringAOP从入门到源码分析大全,学好AOP这一篇就够了(一)
文章目录系列文档索引一、认识AOP1、AOP的引入原因2、AOP常见使用场景日志场景统计场景安防场景性能场景3、AOP概念AOP 的概念Aspect 概念(切面)Join point 概念(连接点)Pointcut 概念(切入点)Advice 概念&…...

【单目标优化算法】樽海鞘群算法(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
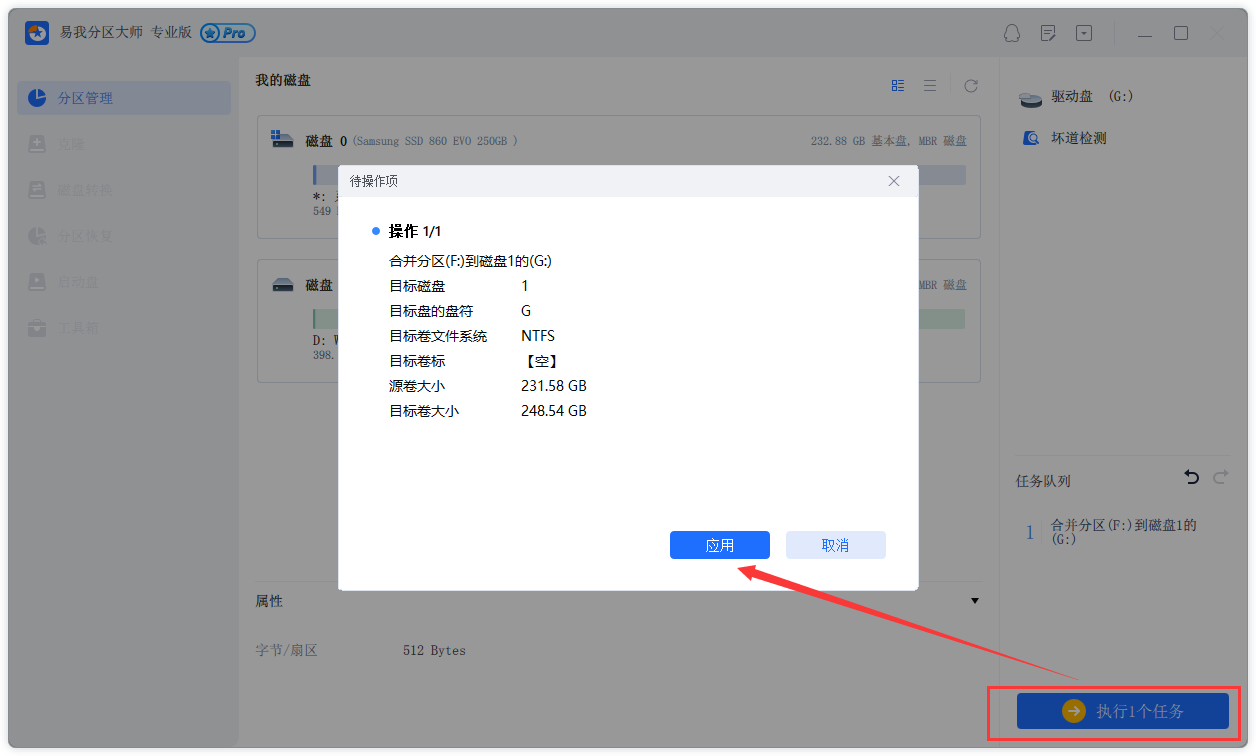
手把手教你,解决C盘分区不足,C盘怎么扩大磁盘分区
由于在磁盘分区中,C盘是很重要的一个磁盘,为了保证C盘有足够的磁盘分区。其中扩大C盘分区很常见的操作之一。那么,C盘怎么扩大磁盘分区?在本文中,易我小编将全面地讲解C盘合并分区的方法。 一、为什么C盘怎么扩大磁盘分…...

Ethernet-APL——过程自动化的新黄金标准
| Ethernet-APL为终客户和设备制造商带来益处 Ethernet-APL(Advanced Physical Layer,高级物理层)是一种两线制以太网物理层,它使用了由IEEE 802.3cg所定义的10BASE-T1L,并采用了新的工艺制造规定,因此构成…...
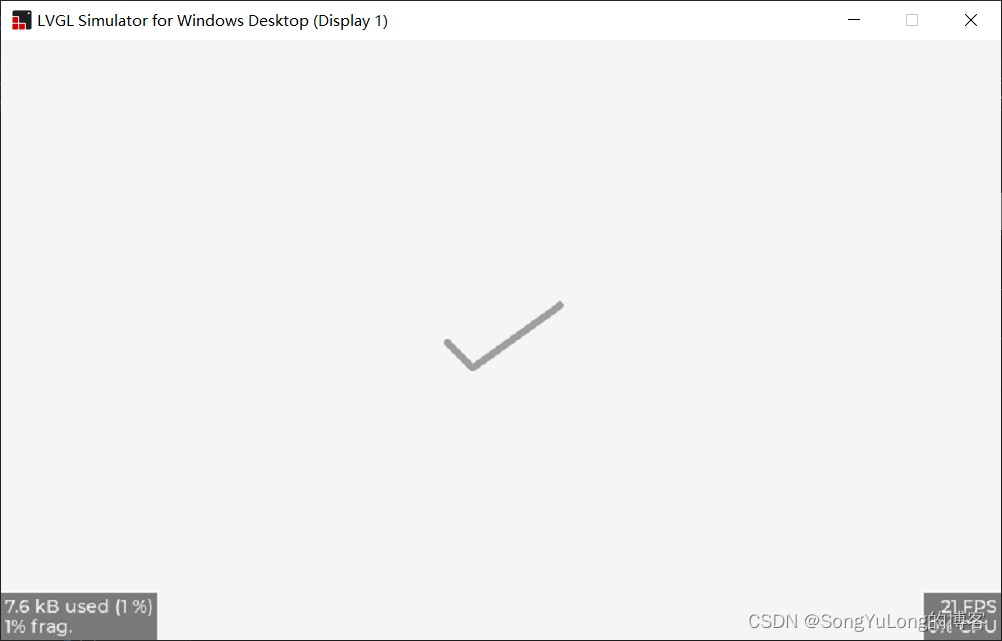
LVGL Styles
LVGL StylesGet started按钮添加标签按钮添加风格滑动条值显示StylesSize stylesBackground stylesBorder stylesOutline stylesShadow stylesImage stylesArc stylesText stylesLine stylesGet started 按钮添加标签 /*** brief 按钮事件回调函数* param e */ void btn_eve…...

扬帆优配|联通港股创近两年新高!A股资源类股爆发,食品饮料领跌
今日上午,A股商场和港股商场均现较大起伏震动,临近上午收盘出现一波跳水,不过,到上午收盘,上证指数仍微涨0.10%,煤炭等资源类板块明显上涨。 港股商场上午走弱,科技股领跌。 沪指微涨0.10%资源…...

Win10+VS2019+Qt5.15.2下编译QCAD
一:官方说法:WindowsDownload and install a C compiler, for example:Visual Studio C Express or Visual Studio CommunityDownload and install Qt from qt.io (see supported platforms):Download for example the online installer fileqt-opensour…...

IPFS去中心化存储实战指南:黑马程序员音乐播放器项目开发完整教程
IPFS去中心化存储实战指南:黑马程序员音乐播放器项目开发完整教程 【免费下载链接】BlockChain 黑马程序员 120天全栈区块链开发 开源教程 项目地址: https://gitcode.com/gh_mirrors/blockchain95/BlockChain 你是否想过如何构建一个真正去中心化的音乐播放…...

Win10家庭版别再卡了!保姆级教程:手动修复gpedit.msc路径,彻底关闭Antimalware Service
Win10家庭版性能优化实战:精准修复组策略路径与系统服务调优每次游戏激战正酣时突然卡顿,或是视频渲染到关键时刻系统响应迟缓,很多Win10家庭版用户都遭遇过这类困扰。任务管理器里那个名为"Antimalware Service Executable"的进程…...

告别元素变动导致的报错:探索自动化测试脚本的 AI“自愈”能力
前言:一个所有测试人都经历过的噩梦 周三晚上十一点,CI/CD流水线再次亮起红灯。 你打开日志,满屏的NoSuchElementException扑面而来。仔细一看——前端团队在昨天的版本中重构了登录页面的DOM结构,原本的#login-btn变成了#signin-button-v2,30个测试用例因此全军覆没。 …...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

终极Chrome画中画扩展:如何在浏览器中实现高效视频多任务处理
终极Chrome画中画扩展:如何在浏览器中实现高效视频多任务处理 【免费下载链接】picture-in-picture-chrome-extension 项目地址: https://gitcode.com/gh_mirrors/pi/picture-in-picture-chrome-extension 想要在浏览网页、处理文档的同时继续观看视频内容吗…...
:3类高危使用场景+2个监管红线预警)
Claude SWOT分析(内部风控文档流出版):3类高危使用场景+2个监管红线预警
更多请点击: https://intelliparadigm.com 第一章:Claude SWOT分析(内部风控文档流出版):3类高危使用场景2个监管红线预警 高危使用场景识别 在企业级AI应用中,Claude模型若未经严格风控适配,…...

别再手动维护接口文档了!用Spring Boot 3和Swagger 3实现代码与文档的自动同步
Spring Boot 3与Swagger 3:构建零维护成本的API文档工作流 每次接口变更都要手动更新文档?团队成员总是抱怨文档与实际接口不一致?在敏捷开发时代,传统文档维护方式已成为拖累工程效率的典型痛点。本文将揭示如何通过Spring Boot …...

如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造
如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造 【免费下载链接】redux-dynamic-modules Modularize Redux by dynamically loading reducers and middlewares. 项目地址: https://gitcode.com/gh_mirrors/re/redux-dynamic-modules Redux Dyn…...
)
Sora 2 GIF导出速度提升300%?20年多媒体架构师亲授GPU加速转码链路(CUDA 12.4 + cuVID硬编实测)
更多请点击: https://kaifayun.com 第一章:Sora 2 GIF导出方法概览 Sora 2 并非 OpenAI 官方发布的模型,当前(截至2024年)并无名为“Sora 2”的公开产品。因此,所谓“Sora 2 GIF导出”实为社区对视频生成工…...

Hitboxer:终极SOCD按键重映射解决方案,彻底解决游戏按键冲突问题
Hitboxer:终极SOCD按键重映射解决方案,彻底解决游戏按键冲突问题 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 在激烈的游戏对战中,你是否曾因同时按下左右方向键而导致角色…...