pixhawk2.4.8-APM固件-MP地面站配置过程记录
目录
- 一、硬件准备
- 二、APM固件、MP地面站下载
- 三、地面站配置
- 1 刷固件
- 2 机架选择
- 3 加速度计校准
- 4 指南针校准
- 5 遥控器校准
- 6 飞行模式
- 7 紧急断电&无头模式
- 8 基础参数设置
- 9 电流计校准
- 10 电调校准
- 11 起飞前检查(每一项都非常重要)
- 12 飞行经验
- 四、遇到的问题
- 1 MP地面站没有显示 全部参数:
- 2 炸鸡-气压计定高冲天:
- 3 突然无法连接地面站
- 五、其他外设
- 1 数传
- 2 灯语&蜂鸣器
- 3 权盛光流
- 4 GPS
- 5 TFmini Plus
相关网址链接汇总:pix2.4.8参考教程(齐全但古老):http://pix.1yuav.com/APM固件下载:https://firmware.ardupilot.org/Copter/MP地面站下载:https://firmware.ardupilot.org/Tools/MissionPlanner/APM日志分析基础-苍穹:https://mp.weixin.qq.com/s/Ha0FPWj91Y9YUqE0GWF8bgAPM日志诊断问题-苍穹:https://mp.weixin.qq.com/s/IITdBYiAb0mZyFlAjjkyAA550装机教程-苍穹:https://mp.weixin.qq.com/s?__biz=MzkyNzI1MDUyNw==&mid=2247484992&idx=1&sn=6a9c937df1ee3b226d24d1aa73793e9f&source=41#wechat_redirect
一些我入门时不知道的常识:飞控包含硬件和软件,硬件是飞控板子,软件就是飞控固件。apm和px4说的是飞控软件也就是固件,pixhawk2.4.8说的是硬件,也就是那块板子。常见的固件:APM、PX4。还有其他的我没用过。常见的硬件:pixhawk2.4.8(没有官方,是国内厂家参考3dr的pixhawk1改的,古老但便宜)。官方认证的厂家:holybro的pixhawk系列pix456,雷讯的v3v5等等。这些都是硬件,有的可以运行APM固件,有的可以运行PX4固件,大多数硬件是两种固件都支持。所以pix2.4.8既可以下APM固件,又可以下PX4固件。地面站:有MP、QGC。MP对APM固件兼容性好,所以一般用APM固件,就会用MP地面站。QGC对PX4固件的兼容性好,用PX4固件,就用QGC地面站来调试飞控。一、硬件准备
稳定飞行的基石:
动力套的配置
飞控和接线
二、APM固件、MP地面站下载
写在前面:
建议第一次用的话,用商家提供的 地面站和固件版本。因为MP版本和APM版本的适配问题,真的真的是很大一个坑。最好先走别人走过的路,走通了再去自由发挥,不然白白浪费时间。下面提供我试飞成功过的版本。下面提供任意版本固件和地面站的下载方法。
-
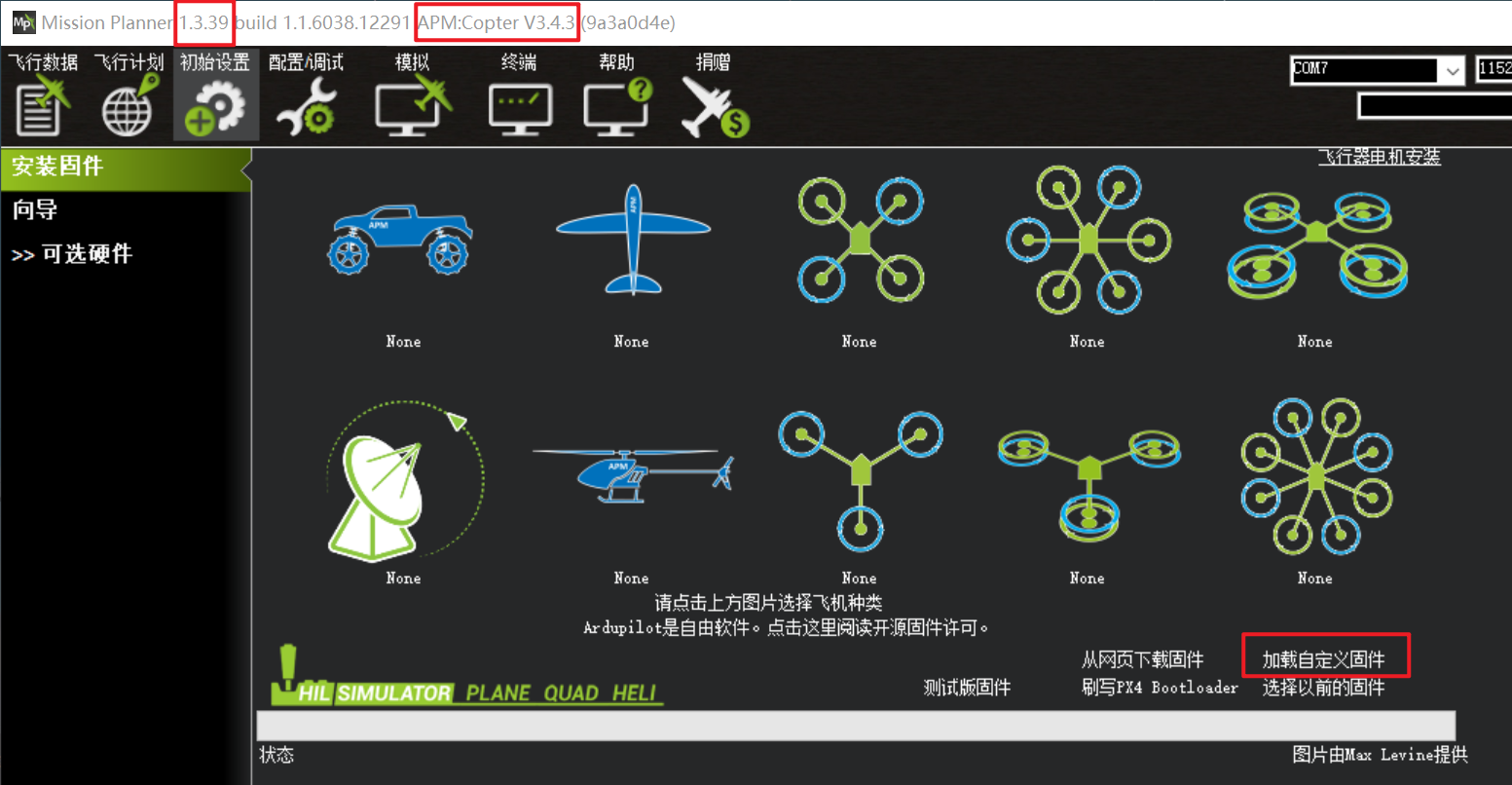
我下载好的固件和地面站,试飞成功的
权盛推荐:
MP地面站:1.3.39
APM固件:3.4.3(权盛光流固件)
下载链接:https://wwzr.lanzout.com/b047plhwh 密码:123 -
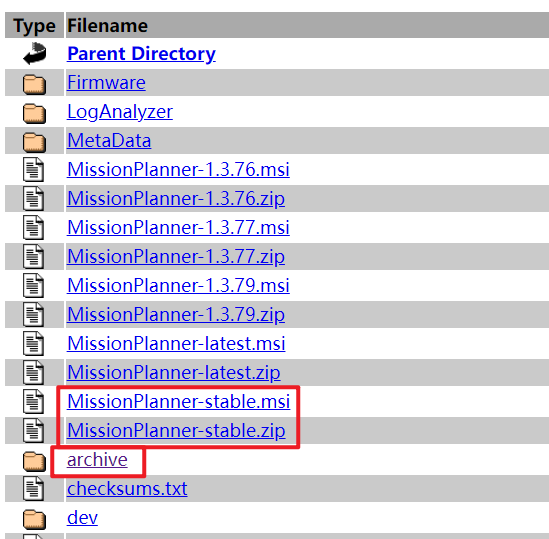
MP地面站 任意版本下载:
官网下载:https://firmware.ardupilot.org/Tools/MissionPlanner/
“archive” 里有旧版本的。.msi 是需要安装的。.zip是绿色不需要安装直接解压使用的。
需要注意的是:电脑如果是第一次安装地面站,要选.msi的,因为在安装过程中会安装所需的驱动。
-
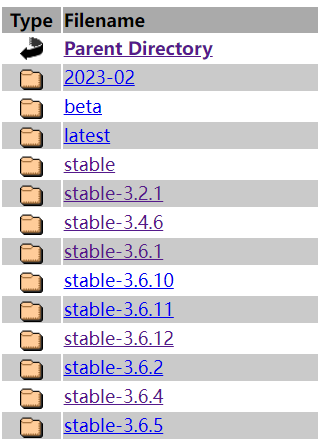
APM固件 任意版本下载(四轴):
官网下载:https://firmware.ardupilot.org/Copter/
下载任意版本教程:http://pix.1yuav.com/ru-he-huo-qu-li-xian-gu-jian.html
总结,自己下载固件时会有这些选项:PX4、fmu v2、fmu v3。
pix2.4.8选择是:有v3选v3,没有v3选v2,没有v2选px4 quad(四轴)。
三、地面站配置
1 刷固件
必须用USB供电。
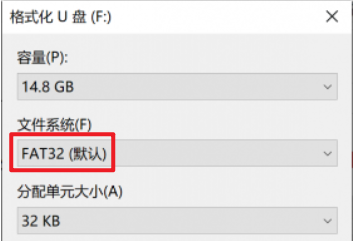
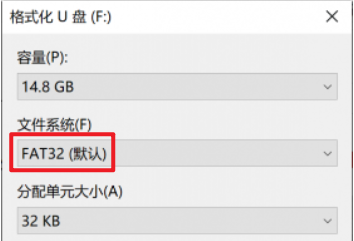
内存卡要安好,不然可能刷好固件无法连接地面站。受2.4.8硬件限制,内存卡最好小于16G,格式必须是FAT32。
2 机架选择
- 机架我是四旋翼。
- 接下来校准按这个顺序来。
下面的校准每一项都是必要的,特别是:别疏忽掉 电流计 和 电调,会炸鸡。

3 加速度计校准
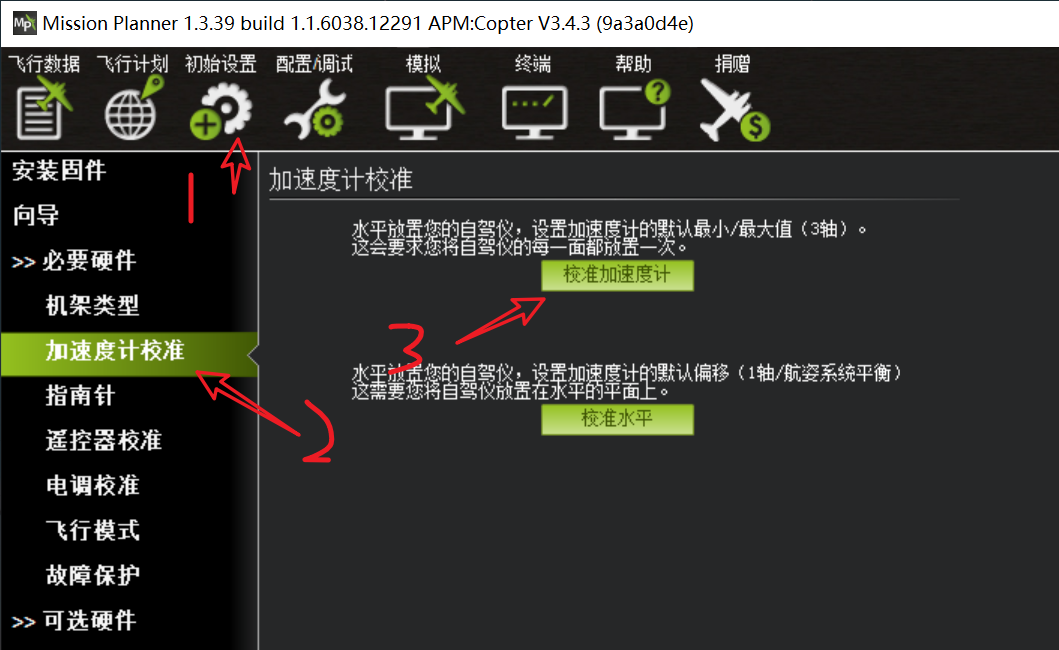
Place vehicle level and press any key(飞机水平放置)完成后回车
Place vehicle on its LEFT side and press any key(飞控面 向左边放置)完成后回车
Place vehicle on its RIGHT side and press any key(向右边放置)完成后回车
Place vehicle nose DOWN and press any key(向下放置)完成后回车
Place vehicle nose UP and press any key(向上放置)完成后回车
Place vehicle on its BACK and press any key(反过来放置)完成后回车
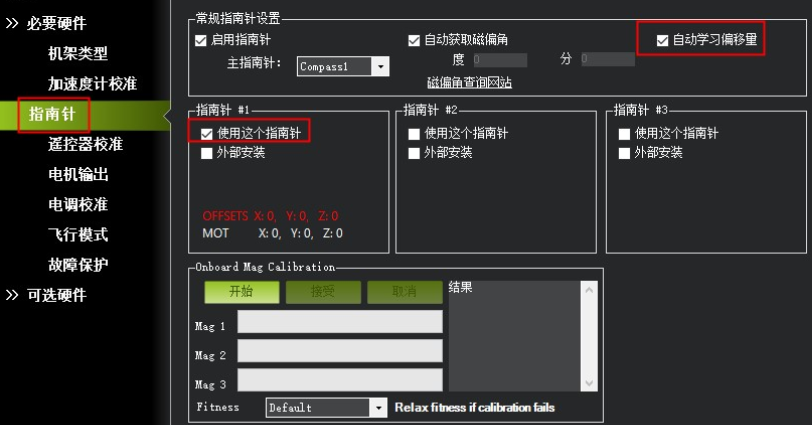
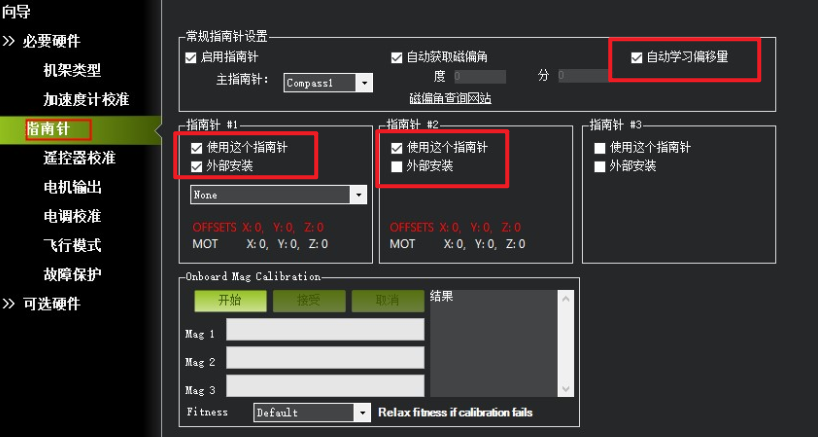
4 指南针校准
无GPS:
有GPS:
5 遥控器校准
需要注意的是:APM固件,遥控器pitch通道要设置为反向。富斯i6s遥控器对应的是通道2要设置反向。
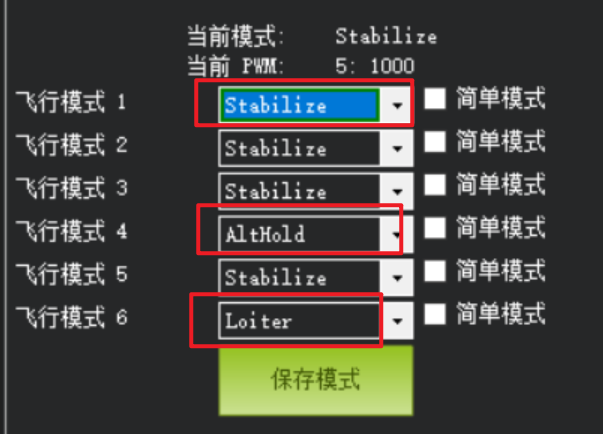
6 飞行模式
APM固件默认 通道5 为设置飞行模式通道。
姿态、定高、定点。
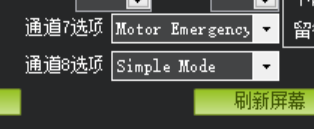
7 紧急断电&无头模式
配置调试选项,扩展参数。
通道7,设置为:Motor Emergency …
通道8,设置为 simple mode
遥控器上对应的也要设置好通道。

通道8,设置为简单模式(无头模式)切换键。
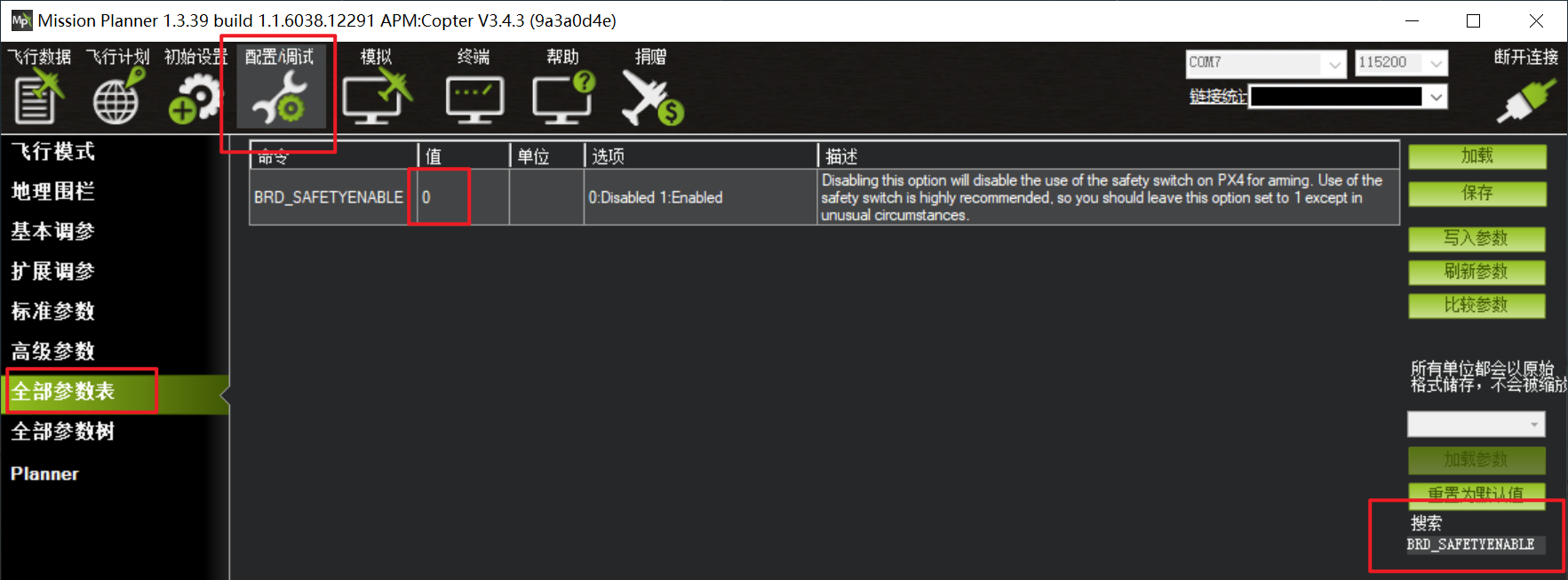
8 基础参数设置
电机怠速值设为0:MOT_SPIN_ARM 0 (可选,不建议设置)禁用安全开关:BRD_SAFETYENABLE 0 (飞机没装安全开关的话,就必须设置)
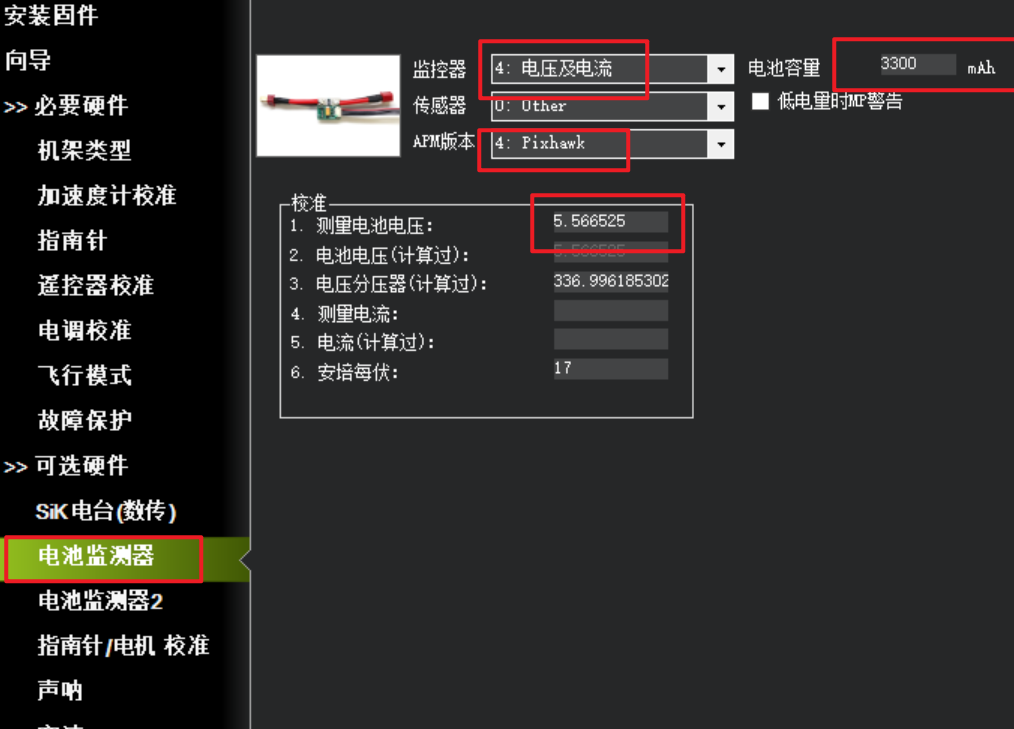
9 电流计校准
10 电调校准
我试了,自动校准不行。
手动校准,首先需要禁用安全开关。 主要是因为我飞机上没装安全开关。
(全部参数表 BRD_SAFETYENABLE 设为0 禁用安全开关)
手动校准步骤:断开飞行器所有电源,遥控器油门拉到最高并保持。插上电池,看到飞控红绿黄闪烁,断开电池,再插上电池,电调滴滴两声,油门拉到最低,电调滴一声,校准完成。
11 起飞前检查(每一项都非常重要)
一定要检查好再飞
疏忽了,就炸鸡
炸鸡了,场面惨烈,心里阴影,
-
电机转向 是否正确 (飞机解锁,轻推油门,用手摸)
-
姿态 是否正常(地面站上看)
-
刹车键 是否正常(不装桨叶,解锁飞机,遥控器扣下刹车键)
-
飞行模式 是否正常(遥控器切换,地面站上看)
-
(可选)光流数据(超声波、光流)是否正常。(没用光流就不管)
12 飞行经验
- 第一个是抓遥控器的手势。
四、遇到的问题
1 MP地面站没有显示 全部参数:
解决方法:https://blog.csdn.net/liberatetheus/article/details/77970479
2 炸鸡-气压计定高冲天:
权盛光流固件3.4.3,姿态模式飞行正常,飞行时切换定高,冲天了。
权哥给的思路是:可能是飞控减震问题,导致的这种现象。
换了超声波就不会了
3 突然无法连接地面站
-
固件:光流3.4.3 地面站:1.3.39
-
解决:电池上电后就可以了。猜测是没电池供电,没过自检?怎么会影响到连接地面站。
-
真实原因:内存 卡问题,换了内存卡好了。不知是满了还是坏了。内存卡没满,格式化后也好了。
-
内存卡:最好是小于16G,格式必须是FAT32。
五、其他外设
1 数传
数传波特率是57600,USB是115200
权盛数传设置:数传用USB连接电脑,选择好串口和波特率,但不点连接。
主要是更改图里的 网络ID 和 通道,两个配置一样就可以通了。

2 灯语&蜂鸣器
黄色双闪:自检失败。
蓝闪烁:无GPS,未解锁。
蓝常亮:已解锁。
绿闪烁:有GPS,未解锁。
绿常亮:已解锁。

3 权盛光流
- 看他的教程文档。
- 主要是:专用固件,接线,安装朝向,地面站配置。
4 GPS
5 TFmini Plus
相关文章:
pixhawk2.4.8-APM固件-MP地面站配置过程记录
目录一、硬件准备二、APM固件、MP地面站下载三、地面站配置1 刷固件2 机架选择3 加速度计校准4 指南针校准5 遥控器校准6 飞行模式7 紧急断电&无头模式8 基础参数设置9 电流计校准10 电调校准11 起飞前检查(每一项都非常重要)12 飞行经验四、遇到的问…...
【unity细节】关于资源商店(Package Maneger)无法下载资源问题的解决
👨💻个人主页:元宇宙-秩沅 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 本文由 秩沅 原创 收录于专栏:unity细节和bug ⭐关于资源商店为何下载不了的问题⭐ 文章目录⭐关于资源商店为何下载不了的问题…...

[Arxiv 2022] A Novel Plug-in Module for Fine-Grained Visual Classification
Contents MethodPlug-in ModuleLoss functionExperimentsReferencesMethod Plug-in Module Backbone:为了帮助模型抽取出不同尺度的特征,作者在 backbone 里加入了 FPNWeakly Supervised Selector:假设 backbone 的 i i...
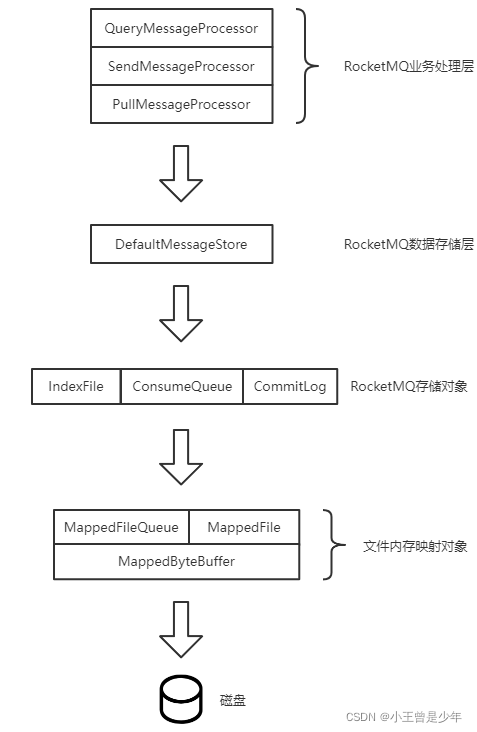
RocketMQ Broker消息处理流程及部分源码解析
🍊 Java学习:Java从入门到精通总结 🍊 深入浅出RocketMQ设计思想:深入浅出RocketMQ设计思想 🍊 绝对不一样的职场干货:大厂最佳实践经验指南 📆 最近更新:2023年2月10日 &#x…...
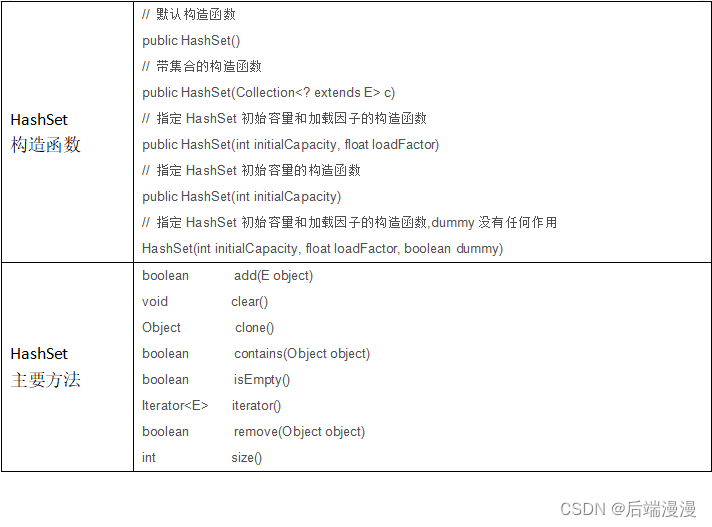
Java面试题:Java集合框架
文章目录一、Java集合框架二、Java集合特性三、各集合类的使用ArrayListLinkedListHashSetHashSet源码解析对源码进行总结HashSet可同步HashSet的使用HashMap四、Iterator迭代器五、遍历集合元素的若干方式参考文章:Hash详解参考文章:深入浅出学Java——…...

时间之间的比较与计算相差年、月、日、小时、分钟、毫秒、纳秒以及判断闰年--LocalDateTime
如何把String/Date转成LocalDateTime参考String、Date与LocalDate、LocalTime、LocalDateTime之间互转 String、Date、LocalDateTime、Calendar与时间戳之间互相转化参考String、Date、LocalDateTime、Calendar与时间戳之间互相转化 比较方法介绍 isBefore(ChronoLocalDateT…...

PyTorch学习笔记:nn.L1Loss——L1损失
PyTorch学习笔记:nn.L1Loss——L1损失 torch.nn.L1Loss(size_averageNone, reduceNone, reductionmean)功能:创建一个绝对值误差损失函数,即L1损失: l(x,y)L{l1,…,lN}T,ln∣xn−yn∣l(x,y)L\{l_1,\dots,l_N\}^T,l_n|x_n-y_n| l(…...

Java程序设计-ssm企业财务管理系统设计与实现
摘要系统设计系统实现开发环境:摘要 对于企业集来说,财务管理的地位很重要。随着计算机和网络在企业中的广泛应用,企业发展速度在不断加快,在这种市场竞争冲击下企业财务管理系统必须优先发展,这样才能保证在竞争中处于优势地位。…...

疑难杂症篇(二十一)--Ubuntu18.04安装usb-cam过程出现的问题
对Ubuntu18.04{\rm Ubuntu 18.04}Ubuntu18.04环境下的ROS{\rm ROS}ROS的melodic{\rm melodic}melodic版本安装usb−cam{\rm usb-cam}usb−cam过程出现的两个常见问题提出解决方案。 1.问题1:usb-cam功能包编译时出现"未定义的引用"的问题 问题描述&#…...

npm-npm i XX --save 和--save-dev
之前使用npm i XX --save 和--save-dev 没太在意,就想记录一下,查到一篇比较全的(链接:NPM install -save 和 -save-dev 傻傻分不清),直接看好了,哈哈~ # 安装模块到项目目录下 npm install moduleName # -g 的意思是…...
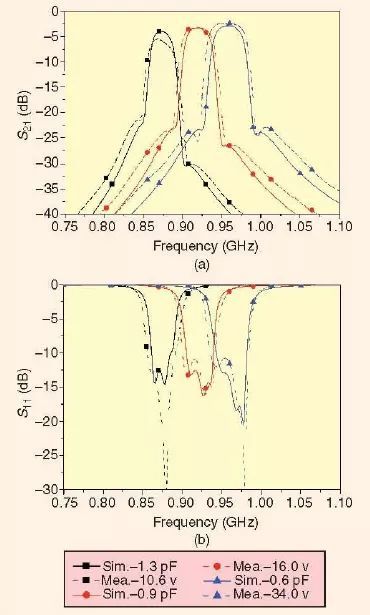
可重构或可调谐微波滤波器技术
电子可重构,或者说电调微波滤波器由于其在改善现在及未来微波系统容量中不断提高的重要性而正吸引着人们越来越多的关注来对其进行研究和开发。例如,崭露头脚的超宽带(UWB)技术要求使用很宽的无线电频谱。然而,作为资源…...
医院智能化解决方案-门(急)诊、医技、智能化项目解决方案
【版权声明】本资料来源网络,知识分享,仅供个人学习,请勿商用。【侵删致歉】如有侵权请联系小编,将在收到信息后第一时间删除!完整资料领取见文末,部分资料内容:篇幅有限,无法完全展…...

判断元素是否在可视区域
前言 在日常开发中,我们经常需要判断目标元素是否在视窗之内或者和视窗的距离小于一个值(例如 100 px),从而实现一些常用的功能,例如: 图片的懒加载列表的无限滚动计算广告元素的曝光情况可点击链接的预加…...

告别传统繁杂的采购合同管理 打造企业自动化采购管理模式
随着企业竞争日趋激烈,采购成本压力剧增,企业对于采购合同管理更加严格,从而把控物资成本。对于任何一家企业采购来说,规范化合同的全面管理,是采购活动中重要的一个环节。 但在如今,依旧有很多企业采购合…...
【prism】路由事件映射到Command命令
在之前的一篇文章中,我介绍了普通的自定义事件: 【wpf】自定义事件总结(Action, EventHandler)_code bean的博客-CSDN博客_wpf action可以说通过Action和EventHandle,自定义事件是相当的方便简单了。https…...
面向对象的基本概念和方法
面向对象的开发方法在近几十年见得以广泛应用,我们常见的Java语言就是一种典型的面向对象的开发语言。然而,面向对象的概念较为复杂,知识点也很细碎,本文整理了面向对象的基本概念和方法,供大家参考。为了便于读者理解…...

数据可视化大屏百度地图绘制行政区域标注实战案例解析(个性化地图、标注、视频、控件、定位、检索)
百度地图开发系列目录 数据可视化大屏应急管理综合指挥调度系统完整案例详解(PHP-API、Echarts、百度地图)数据可视化大屏百度地图API开发:停车场分布标注和检索静态版百度地图高级开发:map.getDistance计算多点之间的距离并输入…...

1.面向对象和类的关系?2.什么是Promise、3.Promise和async、await的关系
面向对象:面向对象是一种编程思想(oop)。(Js里面所有的东西都可以看做对象,Js它是基于原型的面向对象语言,采用原型的方式来构造对象)很多个具有相同属性和行为的对象就可以抽象为类,对象是类的一个实例。JavaScript在…...
【程序化天空盒】过程记录01:日月 天空渐变 大气散射
1 日月 SunAndMoon 昼夜的话肯定少不了太阳和月亮,太阳和月亮实现的道理是一样的,只不过是月亮比太阳多了一个需要控制月牙程度(or添加贴图)的细节~ 1.1 Sun 太阳的话很简单,直接在shader里实现一个太阳跟随平行光旋…...
无线通信中的轨道角动量
目录 一. 前言 二. 如何传输 三. 如何产生 3.1 螺旋结构器件 (1)螺旋相位板 (2)螺旋抛物面天线 3.2 超表面 3.3 天线阵列 3.3.1 相控阵 3.3.2 时控阵 四. 如何识别 一. 前言 轨道角动量:Orbital Angular M…...

Hive 数据库 增删改 完整操作指南
Hive 是基于 Hadoop 的数据仓库,不支持传统数据库的行级事务(标准 Hive),核心用于离线数据分析。Hive 对数据库(Database) 的操作只有 CREATE(增)、DROP(删)、…...

taotoken的用量看板如何帮助我们优化ai提示词设计
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken的用量看板如何帮助我们优化AI提示词设计 效果展示类,结合一个内容生成项目的实际经验,说明如何通…...

基于Taotoken构建每日大赛自动评分与反馈Agent工作流
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 基于Taotoken构建每日大赛自动评分与反馈Agent工作流 对于编程大赛、算法竞赛或日常训练的组织者与教练而言,每日处理大…...

Steam Deck Windows控制器驱动深度配置指南
Steam Deck Windows控制器驱动深度配置指南 【免费下载链接】steam-deck-windows-usermode-driver A windows usermode controller driver for the steam deck internal controller. 项目地址: https://gitcode.com/gh_mirrors/st/steam-deck-windows-usermode-driver 想…...

嘎嘎降AI全平台综合评测:2026年知网维普万方Turnitin达标率完整深度分析报告
嘎嘎降AI全平台综合评测:2026年知网维普万方Turnitin达标率完整深度分析报告 总有人问我选哪个降AI工具,这篇文章把主流的几款对比清楚。 综合推荐嘎嘎降AI(www.aigcleaner.com),4.8元,99.26%达标率。不同…...

远程办公总掉线?四大远控软件横测:谁才是“不断连之王”?
远程办公总掉线?四大远控软件横测:谁才是“不断连之王”? 远程办公最怕 “关键时刻掉链子”:写方案写到一半断连、远程运维突然掉线、跨城开会画面卡死…… 连接稳定性早已成为远控软件的核心生命线。本次横测聚焦ToDesk、向日葵、…...

3PEAK思瑞浦 TPA1811-S5TR SOT23-5 精密运放
特性 供电电压:4伏至30伏 低功耗:在25C时为55A(典型值) 低偏置电压:8V在25C(最大值) 零漂:0.01V/C 轨到轨输出 增益带宽积:500kHz 斜率:0.3V/us...

从动画原理到嵌入式实现:赋予机器人生命感的设计与工程实践
1. 项目概述:当技术遇见灵魂在数字世界和物理世界的交汇处,我们总在尝试创造一些能与我们对话、甚至能触动我们内心的存在。无论是屏幕里那个让你牵挂的动画角色,还是面前这个试图与你眼神交流的服务机器人,一个核心的挑战始终横亘…...

Windows微信QQ防撤回补丁:告别消息撤回烦恼的终极指南
Windows微信QQ防撤回补丁:告别消息撤回烦恼的终极指南 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gitcode.co…...

可视化大屏怎么做?可视化大屏工具你会用吗?
可视化大屏早已不只是技术人员的专属,越来越多的运营、产品和市场人也开始尝试,但是常常陷入各种问题:比如硬件效果一般、数据堆积没重点、动效杂乱干扰信息传达……其实归根结底,这些问题都指向一个核心:缺少一个专业…...