基于Open3D的点云处理16-特征点匹配
点云配准
将点云数据统一到一个世界坐标系的过程称之为点云配准或者点云拼接。(registration/align)
点云配准的过程其实就是找到同名点对;即找到在点云中处在真实世界同一位置的点。
常见的点云配准算法:
ICP、Color ICP、Trimed-ICP 算法流程:
- 选点:
确定参与到配准过程中的点集。 - 匹配确定同名点对:
ICP以两片点云中欧式空间距离最小的点对为同名点 - 非线性优化求解:
采用SVD或者四元数求解变换 - 变换:
将求解的变换参数应用到待配准点云上 - 迭代:
计算此时的状态参数判断配准是否完成。以前后两次参数迭代变
化的差或者RMSE值是否小于给定阈值为迭代终止条件。否则返回(1)
ICP 算法以两片点云中欧式空间距离最小的点对为同名点,如果初始点选择不合适,可能会陷入局部最优配准失败。
基于点特征的配准方法
两种方式:
一种通过特征描述,先分割出场景里的点线等特征,利用这些点进行同名点的匹配,如基于几何空间一致性筛选同名点对。
一种通过点特征描述符确定同名点,如基于FPFH双向最近邻确定同名点对,FPFH描述向量最大的特性是对于点云的同名点的特征向量表现出相似性,即该点云的同名点之间的FPFH特征描述子的二范数趋于零。
测试用例
基于icp的点云匹配(参考)
- 点到点的配准
import open3d as o3d
import numpy as np# 获取示例数据
source_cloud = o3d.io.read_point_cloud("./data/cloud_bin_0.pcd")
target_cloud = o3d.io.read_point_cloud("./data/cloud_bin_1.pcd")
source_cloud.paint_uniform_color([1, 0.706, 0])
target_cloud.paint_uniform_color([0, 0.651, 0.929])
threshold = 0.02# RMSE残差阈值,小于该残差阈值,迭代终止#初始位姿
trans_init = np.asarray([[0.862, 0.011, -0.507, 0.5],[-0.139, 0.967, -0.215, 0.7],[0.487, 0.255, 0.835, -1.4], [0.0, 0.0, 0.0, 1.0]])# 显示未配准点云
o3d.visualization.draw_geometries([source_cloud, target_cloud],zoom=0.4459,front=[0.9288, -0.2951, -0.2242],lookat=[1.6784, 2.0612, 1.4451],up=[-0.3402, -0.9189, -0.1996])# 点到点的ICP
result = o3d.pipelines.registration.registration_icp(source_cloud, target_cloud, threshold,trans_init,o3d.pipelines.registration.TransformationEstimationPointToPoint())
print(result)
print("Transformation is:")
print(result.transformation)# 显示点到点的配准结果
source_cloud.transform(result.transformation)
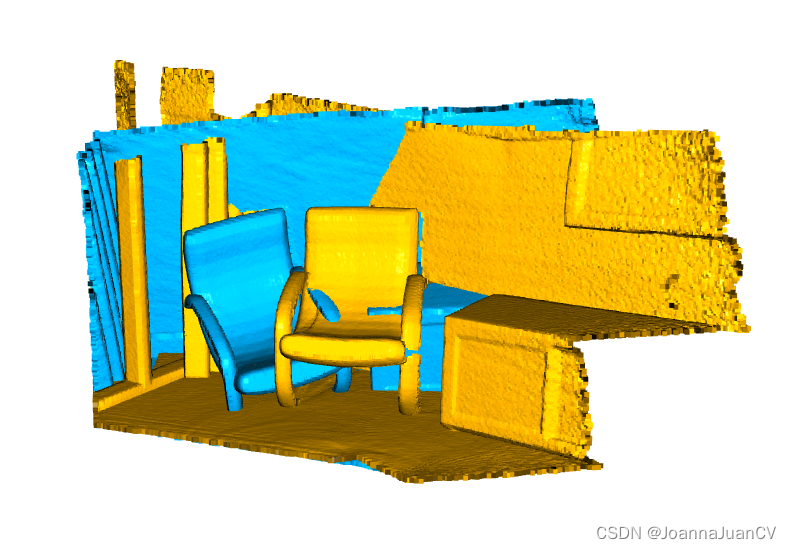
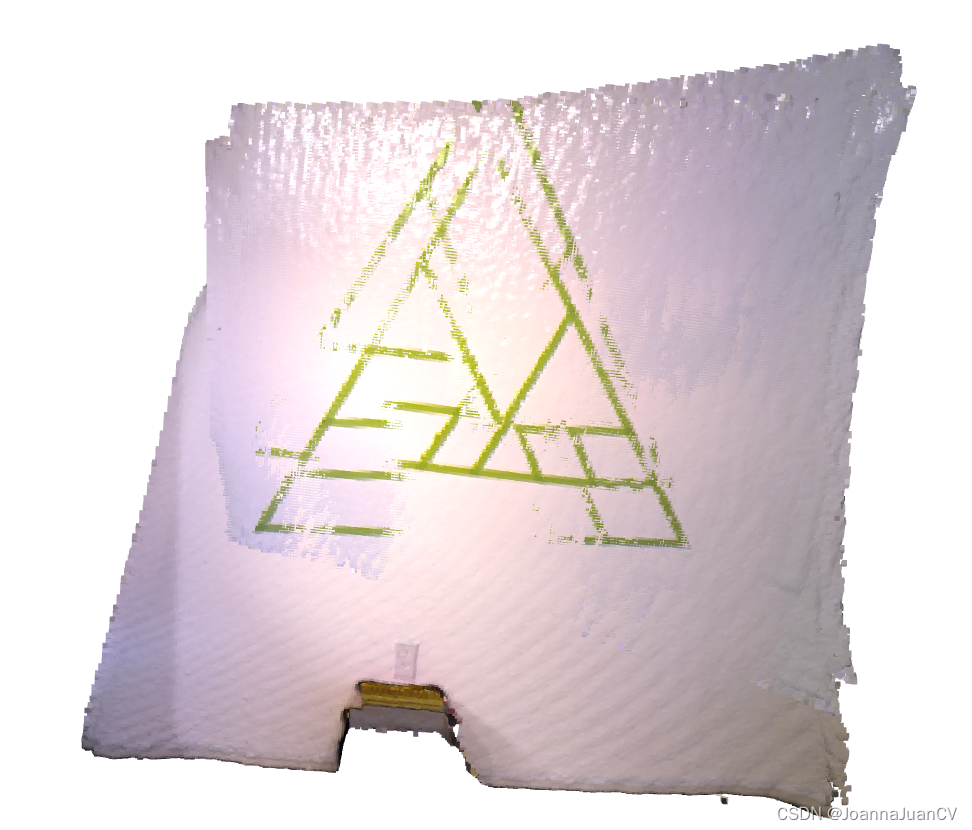
o3d.visualization.draw_geometries([source_cloud, target_cloud],zoom=0.4459,front=[0.9288, -0.2951, -0.2242],lookat=[1.6784, 2.0612, 1.4451],up=[-0.3402, -0.9189, -0.1996])配准前:
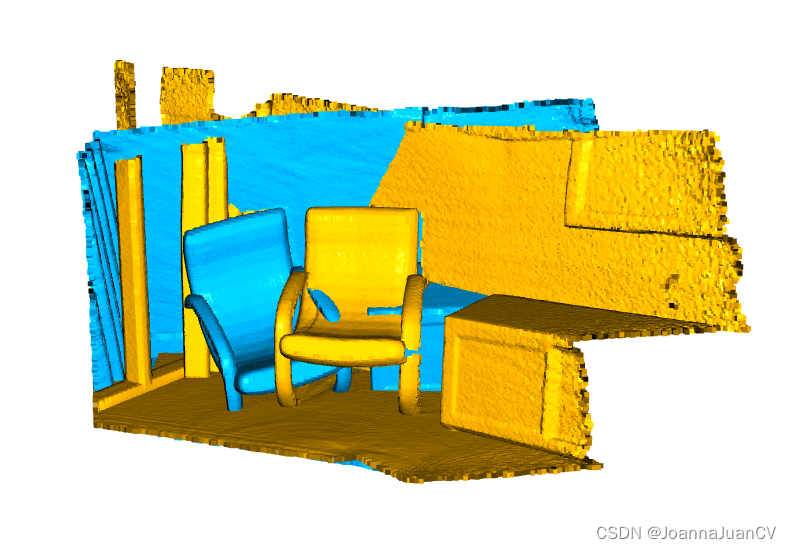
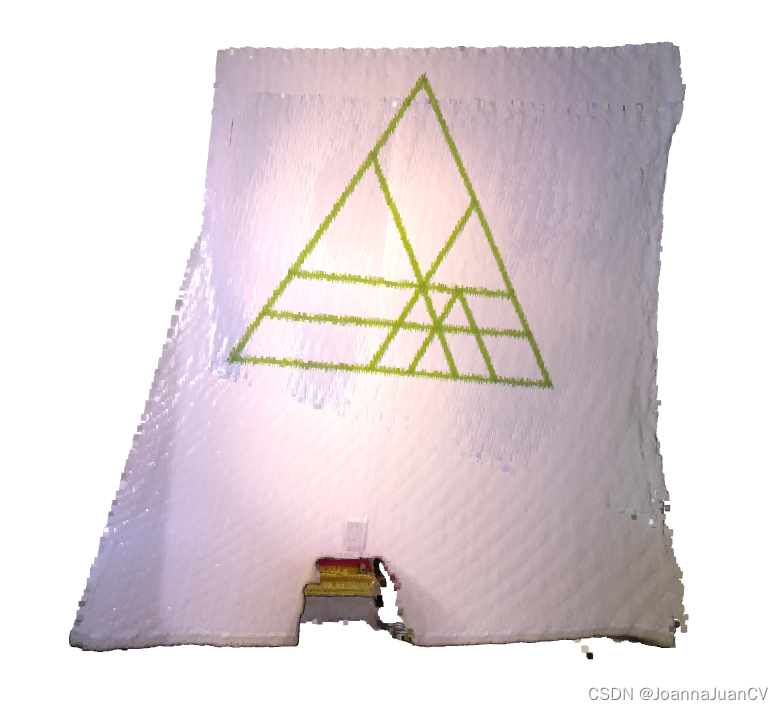
配准结果:

- 点到面的配准
import open3d as o3d
import numpy as np# 获取示例数据
source_cloud = o3d.io.read_point_cloud("./data/cloud_bin_0.pcd")
target_cloud = o3d.io.read_point_cloud("./data/cloud_bin_1.pcd")
source_cloud.paint_uniform_color([1, 0.706, 0])
target_cloud.paint_uniform_color([0, 0.651, 0.929])
threshold = 0.02# RMSE残差阈值,小于该残差阈值,迭代终止#初始位姿
trans_init = np.asarray([[0.862, 0.011, -0.507, 0.5],[-0.139, 0.967, -0.215, 0.7],[0.487, 0.255, 0.835, -1.4], [0.0, 0.0, 0.0, 1.0]])source_cloud = o3d.io.read_point_cloud("./data/cloud_bin_0.pcd")
target_cloud = o3d.io.read_point_cloud("./data/cloud_bin_1.pcd")
source_cloud.paint_uniform_color([1, 0.706, 0])
target_cloud.paint_uniform_color([0, 0.651, 0.929])# 显示未配准点云
o3d.visualization.draw_geometries([source_cloud, target_cloud],zoom=0.4459,front=[0.9288, -0.2951, -0.2242],lookat=[1.6784, 2.0612, 1.4451],up=[-0.3402, -0.9189, -0.1996])# 点到面的ICP
result = o3d.pipelines.registration.registration_icp(source_cloud, target_cloud, threshold,trans_init,o3d.pipelines.registration.TransformationEstimationPointToPlane())
print(result)
print("Transformation is:")
print(result.transformation, "\n")# 显示点到面的配准结果
source_cloud.transform(result.transformation)
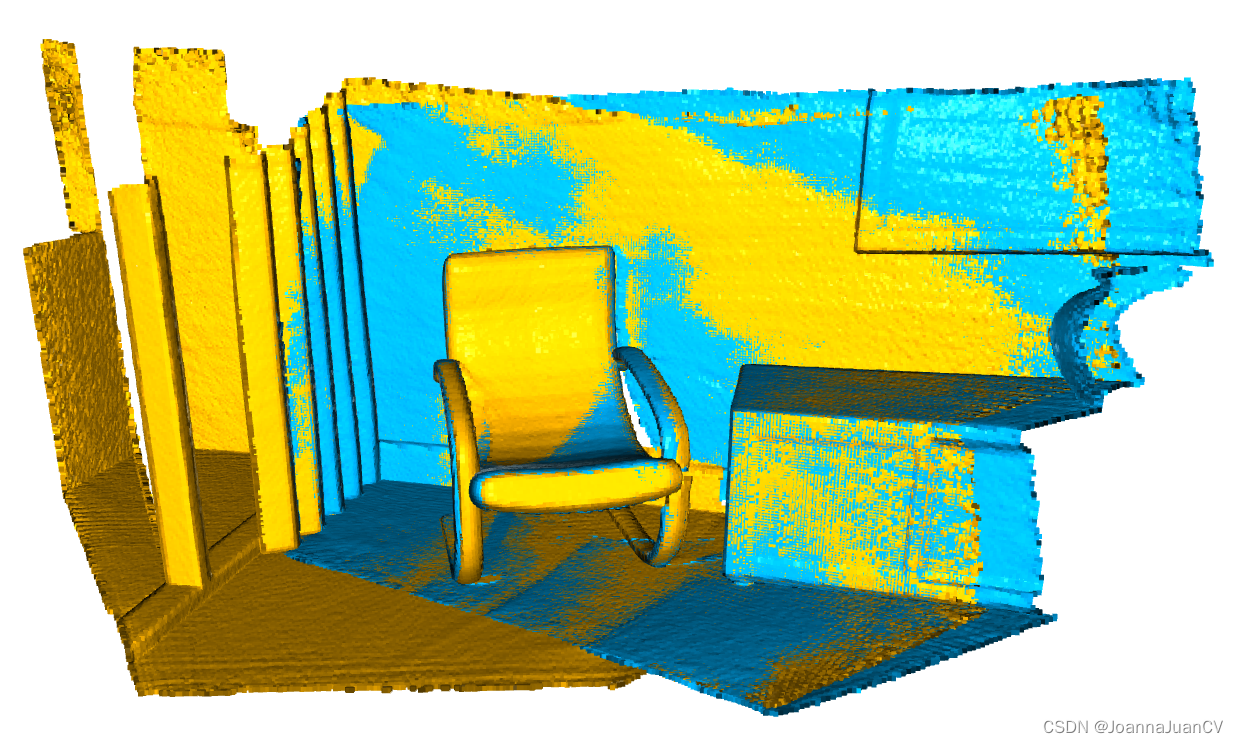
o3d.visualization.draw_geometries([source_cloud, target_cloud],zoom=0.4459,front=[0.9288, -0.2951, -0.2242],lookat=[1.6784, 2.0612, 1.4451],up=[-0.3402, -0.9189, -0.1996])配准结果如图:

基于Color ICP的点云匹配 参考
import open3d as o3d
import numpy as np
import copydef draw_registration_result_original_color(source, target, transformation):source_temp = copy.deepcopy(source)source_temp.transform(transformation)o3d.visualization.draw_geometries([source_temp, target],zoom=0.5,front=[-0.2458, -0.8088, 0.5342],lookat=[1.7745, 2.2305, 0.9787],up=[0.3109, -0.5878, -0.7468])
print("1. Load two point clouds and show initial pose")
demo_colored_icp_pcds = o3d.data.DemoColoredICPPointClouds()
source = o3d.io.read_point_cloud(demo_colored_icp_pcds.paths[0])
target = o3d.io.read_point_cloud(demo_colored_icp_pcds.paths[1])# draw initial alignment
current_transformation = np.identity(4)
draw_registration_result_original_color(source, target, current_transformation)# point to plane ICP
current_transformation = np.identity(4)
print("2. Point-to-plane ICP registration is applied on original point")
print(" clouds to refine the alignment. Distance threshold 0.02.")
result_icp = o3d.pipelines.registration.registration_icp(source, target, 0.02, current_transformation,o3d.pipelines.registration.TransformationEstimationPointToPlane())
print(result_icp)
draw_registration_result_original_color(source, target,result_icp.transformation)# colored pointcloud registration
# This is implementation of following paper
# J. Park, Q.-Y. Zhou, V. Koltun,
# Colored Point Cloud Registration Revisited, ICCV 2017
voxel_radius = [0.04, 0.02, 0.01]
max_iter = [50, 30, 14]
current_transformation = np.identity(4)
print("3. Colored point cloud registration")
for scale in range(3):iter = max_iter[scale]radius = voxel_radius[scale]print([iter, radius, scale])print("3-1. Downsample with a voxel size %.2f" % radius)source_down = source.voxel_down_sample(radius)target_down = target.voxel_down_sample(radius)print("3-2. Estimate normal.")source_down.estimate_normals(o3d.geometry.KDTreeSearchParamHybrid(radius=radius * 2, max_nn=30))target_down.estimate_normals(o3d.geometry.KDTreeSearchParamHybrid(radius=radius * 2, max_nn=30))print("3-3. Applying colored point cloud registration")result_icp = o3d.pipelines.registration.registration_colored_icp(source_down, target_down, radius, current_transformation,o3d.pipelines.registration.TransformationEstimationForColoredICP(),o3d.pipelines.registration.ICPConvergenceCriteria(relative_fitness=1e-6,relative_rmse=1e-6,max_iteration=iter))current_transformation = result_icp.transformationprint(result_icp)
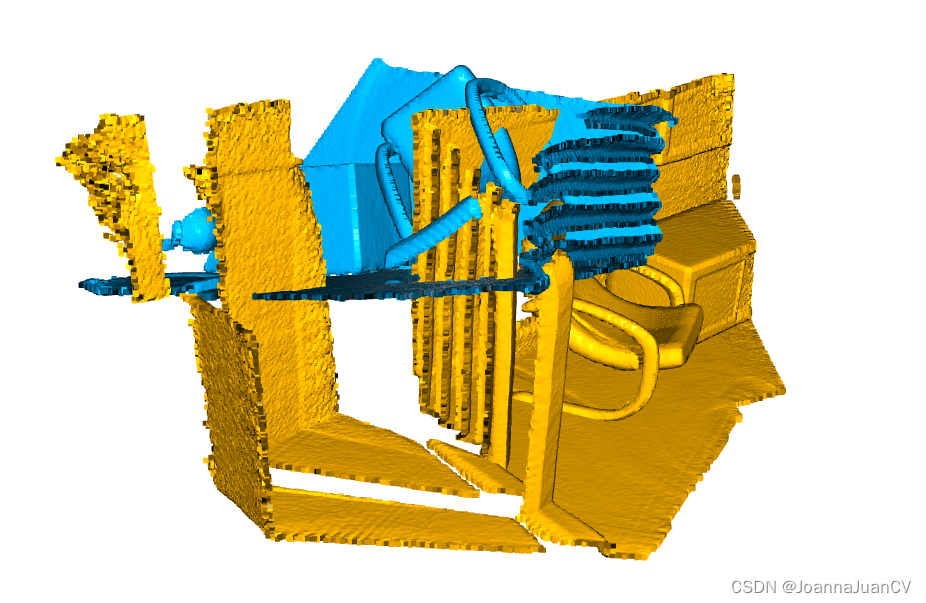
draw_registration_result_original_color(source, target,result_icp.transformation)配准前:
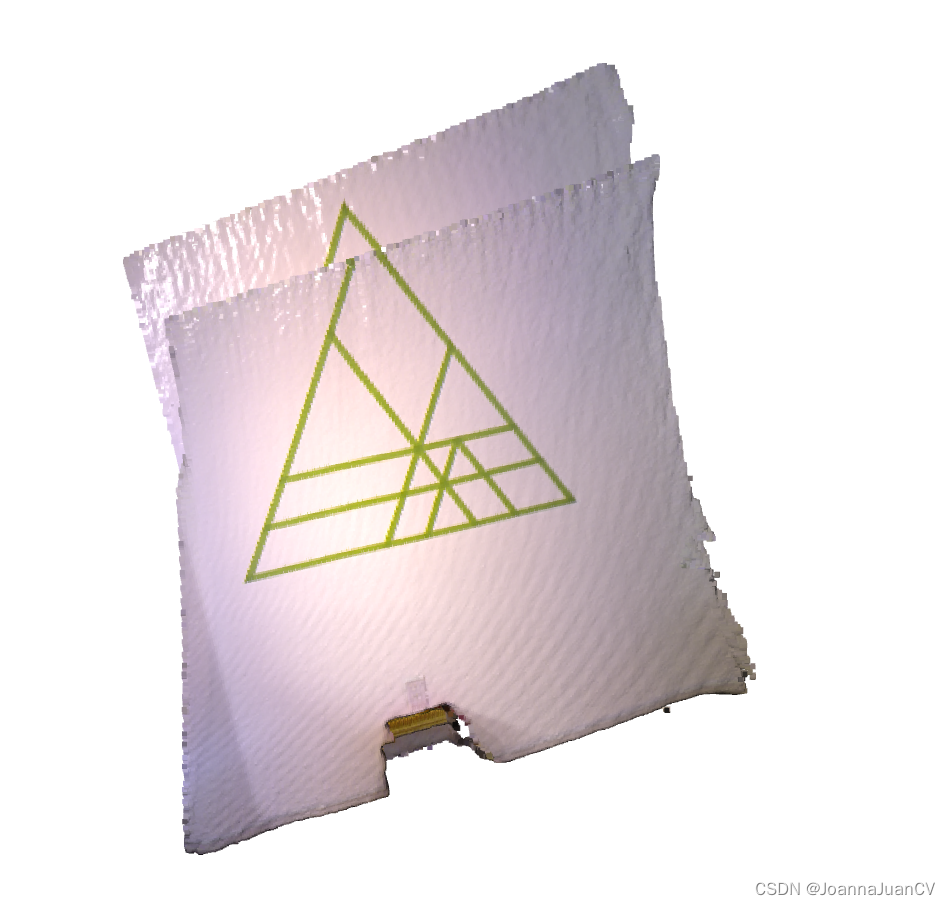
基于点到平面icp的配准:
基于color icp的配准结果:
基于fpfh特征的点云匹配
import numpy as np
import copy
import open3d as o3ddef draw_registration_result(source, target, transformation):source_temp = copy.deepcopy(source)target_temp = copy.deepcopy(target)source_temp.paint_uniform_color([1, 0.706, 0])target_temp.paint_uniform_color([0, 0.651, 0.929])source_temp.transform(transformation)o3d.visualization.draw_geometries([source_temp, target_temp],zoom=0.4559,front=[0.6452, -0.3036, -0.7011],lookat=[1.9892, 2.0208, 1.8945],up=[-0.2779, -0.9482, 0.1556])def preprocess_point_cloud(pcd, voxel_size):print(":: Downsample with a voxel size %.3f." % voxel_size)pcd_down = pcd.voxel_down_sample(voxel_size)radius_normal = voxel_size * 2print(":: Estimate normal with search radius %.3f." % radius_normal)pcd_down.estimate_normals(o3d.geometry.KDTreeSearchParamHybrid(radius=radius_normal, max_nn=30))radius_feature = voxel_size * 5print(":: Compute FPFH feature with search radius %.3f." % radius_feature)pcd_fpfh = o3d.pipelines.registration.compute_fpfh_feature(pcd_down,o3d.geometry.KDTreeSearchParamHybrid(radius=radius_feature, max_nn=100))return pcd_down, pcd_fpfhdef prepare_dataset(voxel_size):print(":: Load two point clouds and disturb initial pose.")demo_icp_pcds = o3d.data.DemoICPPointClouds()source = o3d.io.read_point_cloud(demo_icp_pcds.paths[0])target = o3d.io.read_point_cloud(demo_icp_pcds.paths[1])trans_init = np.asarray([[0.0, 0.0, 1.0, 0.0], [1.0, 0.0, 0.0, 0.0],[0.0, 1.0, 0.0, 0.0], [0.0, 0.0, 0.0, 1.0]])source.transform(trans_init)draw_registration_result(source, target, np.identity(4))source_down, source_fpfh = preprocess_point_cloud(source, voxel_size)target_down, target_fpfh = preprocess_point_cloud(target, voxel_size)return source, target, source_down, target_down, source_fpfh, target_fpfhdef execute_global_registration(source_down, target_down, source_fpfh,target_fpfh, voxel_size):distance_threshold = voxel_size * 1.5print(":: RANSAC registration on downsampled point clouds.")print(" Since the downsampling voxel size is %.3f," % voxel_size)print(" we use a liberal distance threshold %.3f." % distance_threshold)result = o3d.pipelines.registration.registration_ransac_based_on_feature_matching(source_down, target_down, source_fpfh, target_fpfh, True,distance_threshold,o3d.pipelines.registration.TransformationEstimationPointToPoint(False),3, [o3d.pipelines.registration.CorrespondenceCheckerBasedOnEdgeLength(0.9),o3d.pipelines.registration.CorrespondenceCheckerBasedOnDistance(distance_threshold)], o3d.pipelines.registration.RANSACConvergenceCriteria(100000, 0.999))return resultvoxel_size = 0.05 # means 5cm for this dataset
source, target, source_down, target_down, source_fpfh, target_fpfh = prepare_dataset(voxel_size)result_ransac = execute_global_registration(source_down, target_down,source_fpfh, target_fpfh,voxel_size)
print(result_ransac)
draw_registration_result(source_down, target_down, result_ransac.transformation)
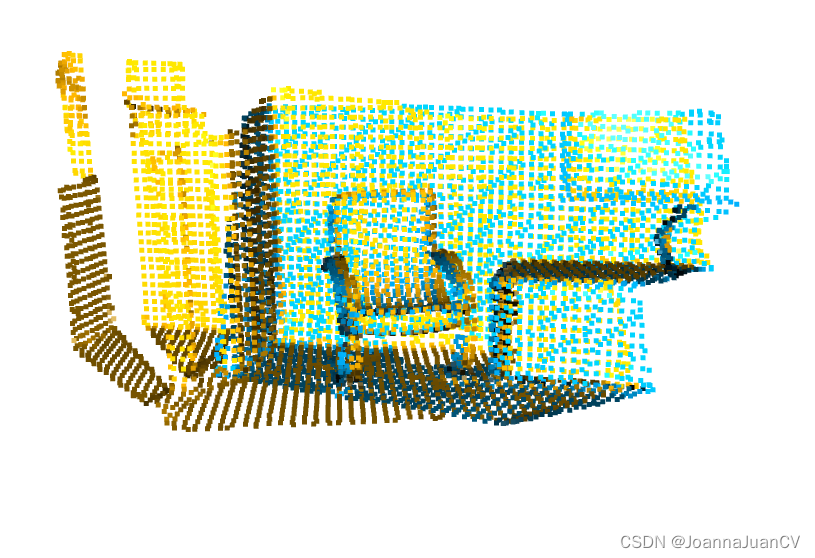
匹配前:
匹配结果:
相关文章:
基于Open3D的点云处理16-特征点匹配
点云配准 将点云数据统一到一个世界坐标系的过程称之为点云配准或者点云拼接。(registration/align) 点云配准的过程其实就是找到同名点对;即找到在点云中处在真实世界同一位置的点。 常见的点云配准算法: ICP、Color ICP、Trimed-ICP 算法…...
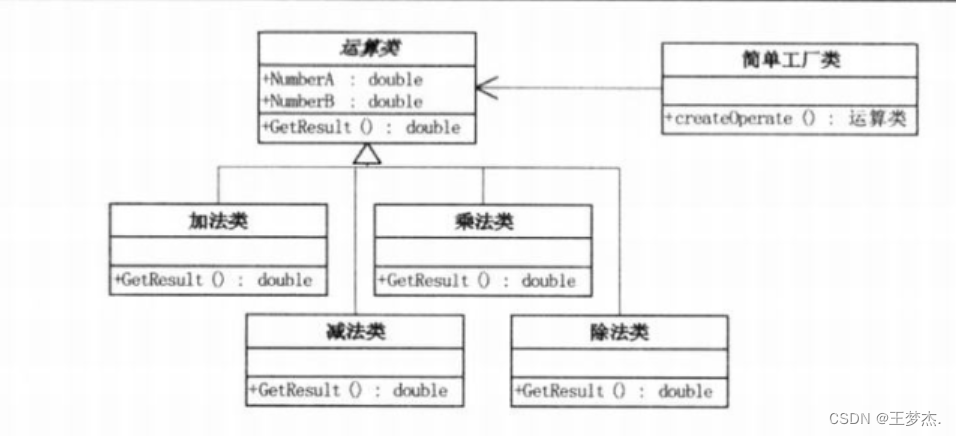
设计模式—简单工厂
目录 一、前言 二、简单工厂模式 1、计算器例子 2、优化后版本 3、结合面向对象进行优化(封装) 3.1、Operation运算类 3.2、客户端 4、利用面向对象三大特性(继承和多态) 4.1、Operation类 4.2、加法类 4.3、减法类 4…...
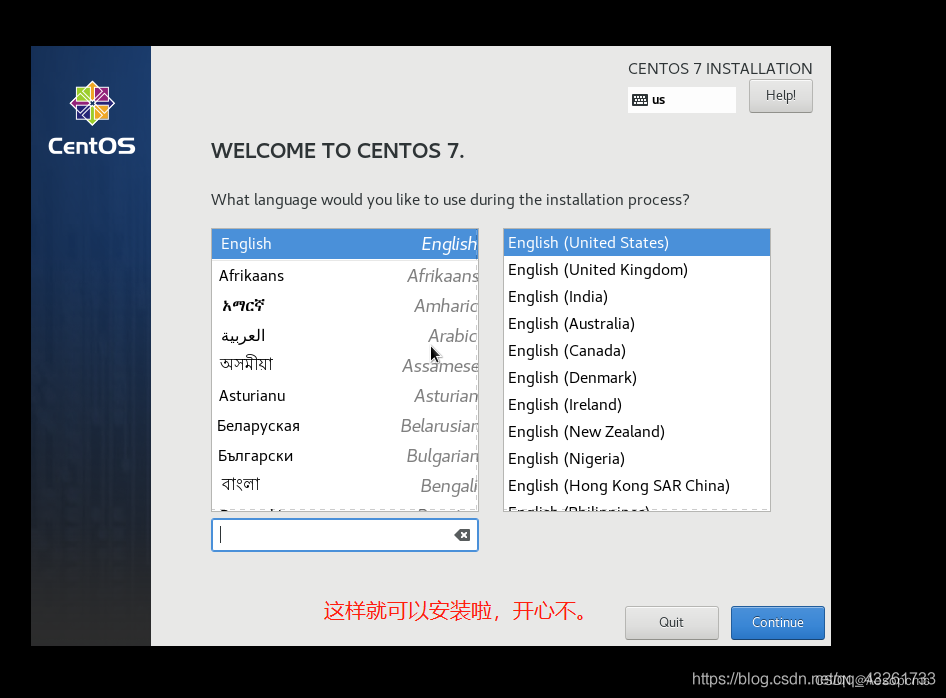
真机安装Linux Centos7
准备工具: 8G左右U盘最新版UltraISOCentOS7光盘镜像 操作步骤 下载镜像 地址:http://isoredirect.centos.org/centos/7/isos/x86_64/ 安装刻录工具UltraISO,刻录镜像到U盘 ① 选择ISO镜像文件 ② 写入磁盘镜像,在这里选择你的U盘…...
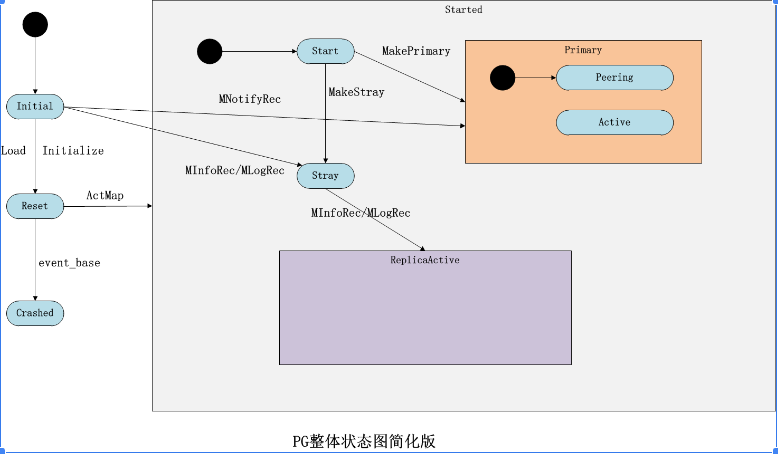
ceph peering机制-状态机
本章介绍ceph中比较复杂的模块: Peering机制。该过程保障PG内各个副本之间数据的一致性,并实现PG的各种状态的维护和转换。本章首先介绍boost库的statechart状态机基本知识,Ceph使用它来管理PG的状态转换。其次介绍PG的创建过程以及相应的状…...

Java | File类
目录: File类File类中常用的方法:boolean exists( ) :判断此 文件/目录 是否存在boolean createNewFile( ) :创建一个文件boolean mkdir( ) :创建 “单层” 目录/文件夹boolean mkdirs( ) :创建 “多层” 目…...

数学建模之灰色预测
灰色预测(Grey Forecasting)是一种用于时间序列数据分析和预测的方法,通常用于处理具有较少历史数据的情况或者数据不够充分的情况。它是一种非常简单但有效的方法,基于灰色系统理论,用来估计未来的趋势。 以下是灰色…...

03_nodejd_npm install报错
npm install报错 npm ERR! code ERESOLVE npm ERR! ERESOLVE unable to resolve dependency tree npm ERR! npm ERR! While resolving: 5kcrm11.0.0 npm ERR! Found: vue2.5.17 npm ERR! node_modules/vue npm ERR! vue"2.5.17" from the root project npm ERR! np…...
three.js(二):webpack + three.js + ts
用webpackts 开发 three.js 项目 webpack 依旧是主流的模块打包工具;ts和three.js 是绝配,three.js本身就是用ts写的,ts可以为three 项目提前做好规则约束,使项目的开发更加顺畅。 1.创建一个目录,初始化 npm mkdir demo cd de…...
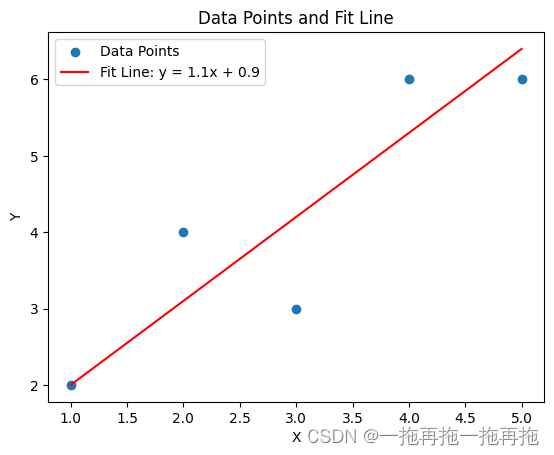
最小二乘法处理线性回归
最小二乘法是一种数学优化技术,用于查找最适合一组数据点的函数。 该方法主要用于线性回归分析,当然,也可用于非线性问题。 开始之前,我们先理解一下什么是回归。 回归:回归是一种监督学习算法,用于建模和…...

ModbusCRC16校验 示例代码
作者: Herman Ye Galbot Auromix 测试环境: Ubuntu20.04 更新日期: 2023/08/30 注1: Auromix 是一个机器人爱好者开源组织。 注2: 本文在更新日期经过测试,确认有效。 笔者出于学习交流目的, 给…...
一不留神就掉坑
乘除顺序问题 在据卡特兰数[1]公式,解决leetcode-96 不同的二叉搜索树[2]时,遇到一个非常诡异的问题, package mainimport "fmt"func main() { for i : 0; i < 40; i { fmt.Printf("第%d个卡特兰数为:%d\n", i, numTrees(i)) }}func numTrees(n int) i…...
Redis数据类型(list\set\zset)
"maybe its why" List类型 列表类型是⽤来存储多个有序的字符串,列表中的每个字符串称为元素(element),⼀个列表最多可以存储个2^32 - 1个元素。在Redis中,可以对列表两端插⼊(push)…...

TongWeb安装以及集成
TongWeb 安装步骤 静默安装 获取linux可执行安装包 如: Install_TWx.x.x.x_Enterprise_Linux.bin 创建安装所需配置文件 install.properties 内容如下 [root@node5 tongweb]# cat install.properties INSTALL_UI=silent USER_INSTALL_DIR=/home/tongweb SILENT_JDK_HOME=/jd…...
ScreenToGif-动图制作软件实用操作
ScreenToGif官网:ScreenToGif ⭕第一步:启动页面 ⭕第二步:选项 🥝录像机-捕获频率选择手动-播放延迟1000ms(可以任意) ⭕第三步:录像机开始录屏 🥝我们调整录屏的大小后,打开画图,…...

sqlibs安装及复现
sqlibs安装 安装phpstudy后,到github上获取sqlibs源码 sqli-labs项目地址—Github获取:GitHub - Audi-1/sqli-labs: SQLI labs to test error based, Blind boolean based, Time based. 在phpstudy本地文件中的Apache目录中解压上方下载的源码。 将sq…...

OpenAI 创始人 Sam Altman 博客有一篇 10 年前的文章
OpenAI 创始人 Sam Altman 博客有一篇 10 年前的文章《Advice for ambitious 19 year olds》,给 19 岁年轻人的建议,从 #参考答案 看到,非常适合我们🤣年轻人,顺便用 GPT4 重新翻译了下全文。 太长不读纯摘要版本如下&…...
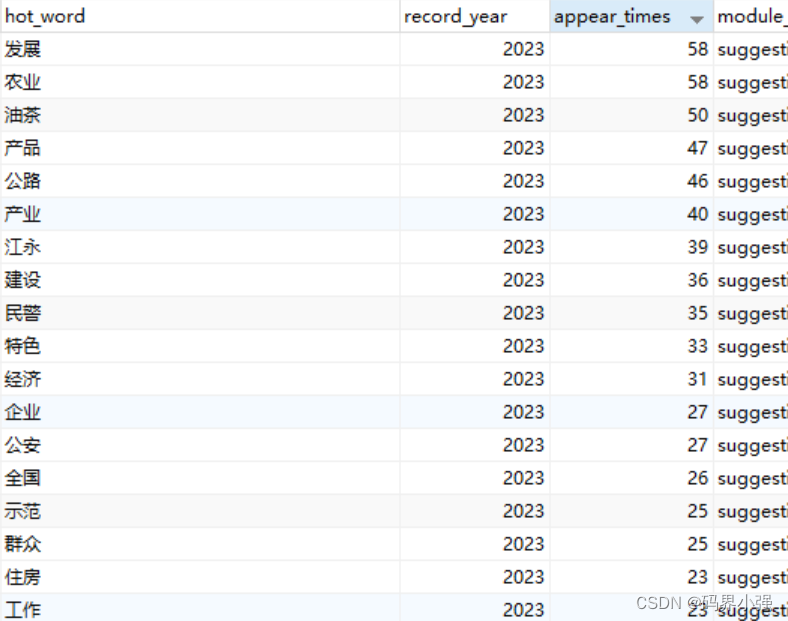
写的一款简易的热点词汇记录工具
项目需要对用户提交的附件、文章、搜索框内容等做热词分析。如下图: 公司有大数据团队。本着不麻烦别人就不麻烦别人的原则,写了一款简易的记录工具,原理也简单,手工在业务插入锚点,用分词器分好词,排掉字…...
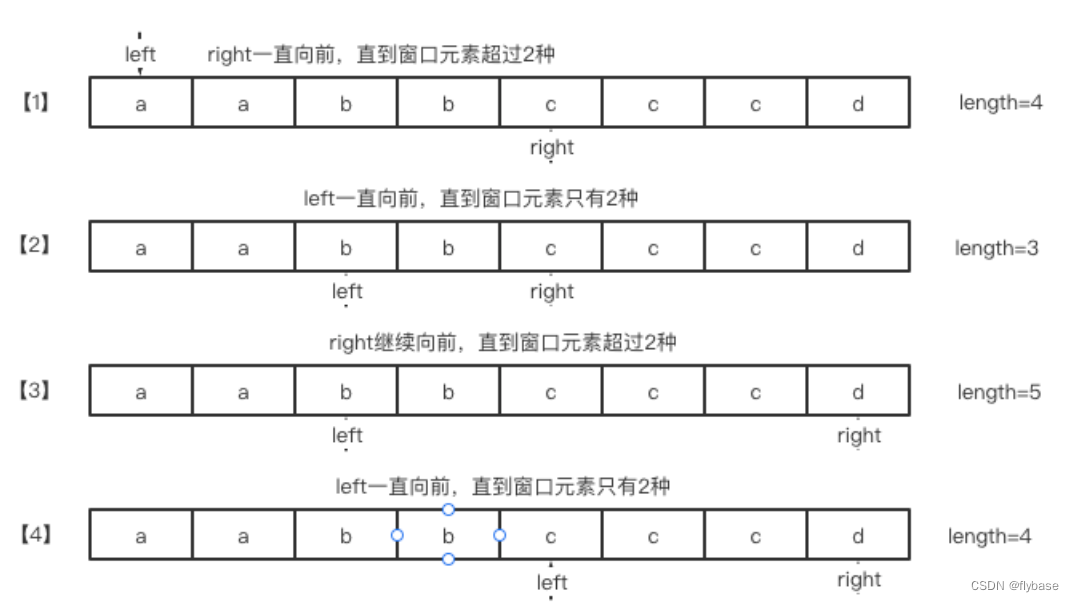
算法通关村——滑动窗口高频问题
1. 无重复字符的最长子串 给定一个字符串 s ,请你找出其中不含有重复字符的 最长子串 的长度。 示例 1: 输入: s “abcabcbb” 输出: 3 解释: 因为无重复字符的最长子串是 “abc”,所以其长度为 3。 1.1 滑动窗口 找到最长字串需要找到字串的首尾位置…...
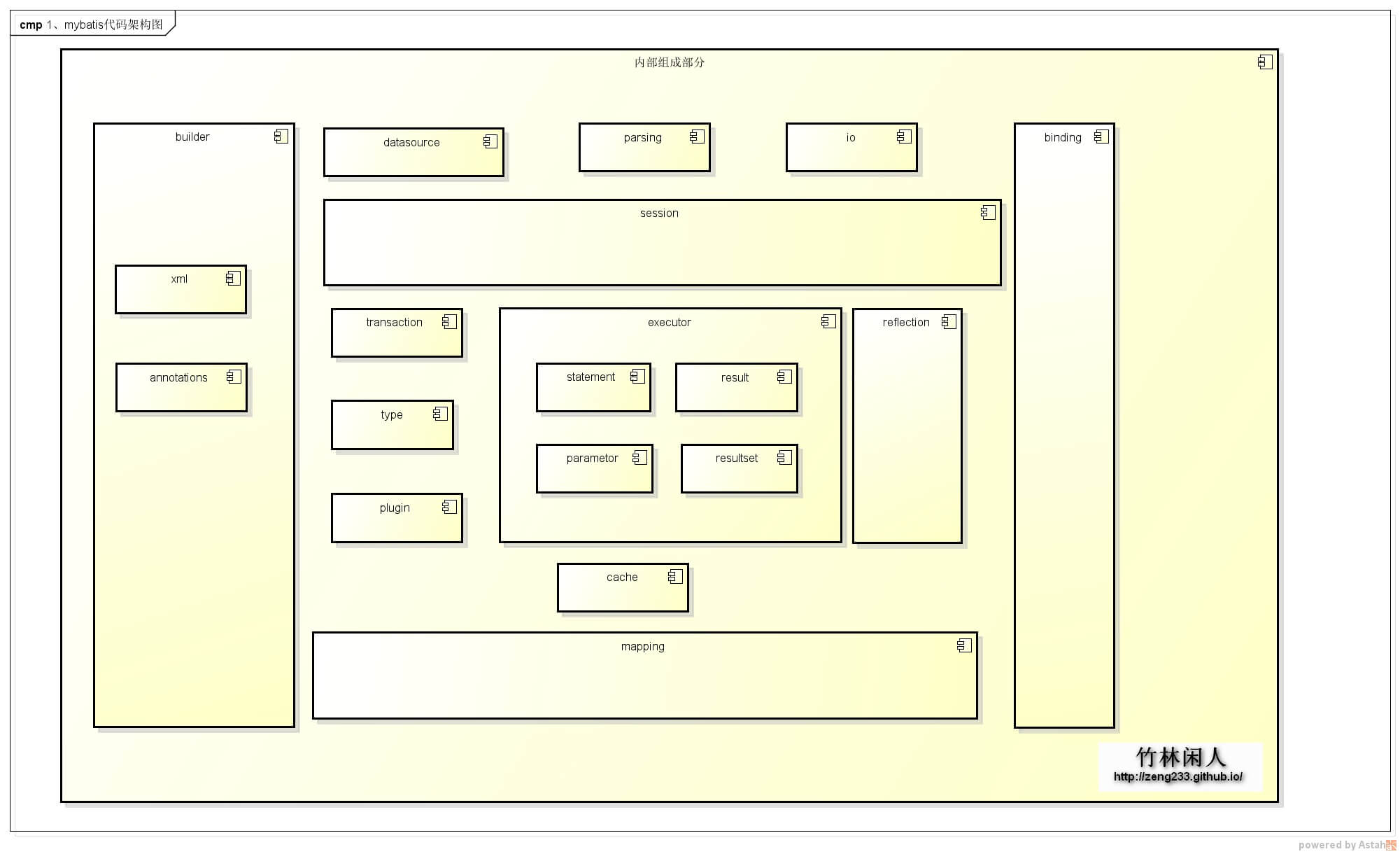
mybatis源码学习-2-项目结构
写在前面,这里会有很多借鉴的内容,有以下三个原因 本博客只是作为本人学习记录并用以分享,并不是专业的技术型博客笔者是位刚刚开始尝试阅读源码的人,对源码的阅读流程乃至整体架构并不熟悉,观看他人博客可以帮助我快速入门如果只是笔者自己观看,难免会有很多弄不懂乃至理解错误…...
selenium 自动化测试——环境搭建
安装python,并且使用pip命令安装 selenium pip3 install selenium 然后尝试第一次使用selenium 完成一个简单的测试自动化脚本 from selenium import webdriver from selenium.webdriver.common.by import By import timedriver webdriver.Chrome() driver.get(…...

数据库云服务与Serverless
数据库云服务与Serverless 1. 技术分析 1.1 云数据库概述 云数据库是数据库服务的未来方向: 云数据库类型IaaS: 虚拟机部署PaaS: 托管服务Serverless: 无服务器云服务优势:弹性伸缩自动备份高可用性1.2 Serverless数据库 Serverless特点按需付费: 按使用量计费自动扩…...
Vue 项目中 vis-network 点击节点不生效的问题排查:外层 transform 缩放导致坐标偏移
最近在 Vue3 项目中把一个原生 HTML 版知识图谱迁移成 Vue 组件。原始 HTML 使用 vis-network 实现节点关系图,点击节点可以正常展开下一级。但迁移到 Vue 项目后,图谱可以正常渲染,节点、连线、布局都没有问题,唯独点击节点时无法…...

HarmonyOS ArkWeb 系列之用户一复制,我就知道——剪贴板事件监听实战
文章目录 剪贴板事件有哪几个ArkTS 侧配置H5 侧的事件监听实现流程图:copy 事件拦截修改三种事件的使用场景对比一个实用的"只允许粘贴纯文本"方案踩坑记录写在最后 上一篇讲了怎么用代码主动读写剪贴板。但有时候需求不是主动操作,而是监听—…...

当贝叶斯遇见流数据:在线变点检测在IoT异常监控中的实战指南
贝叶斯在线变点检测:IoT实时异常监控的智能引擎 工厂车间里,数百个温度传感器正以每秒10次的频率向中央系统发送数据流。突然,3号机床的轴承温度读数开始出现微妙波动——这是设备过热的早期信号,但传统阈值报警系统却毫无反应。两…...

Unity Timeline实战:除了过场动画,你的Signal Track和Control Track用对了吗?
Unity Timeline实战:Signal Track与Control Track的高级应用指南 在Unity开发者的工具箱中,Timeline常被视为制作过场动画的专属工具。但当我们深入挖掘其潜力时,会发现它实际上是一个强大的游戏逻辑编排系统。本文将带您突破基础应用&#x…...

实测 DeepSeek-V4 接入 Hermes:一句话爬取几十个网页,真的丝滑!
你好,我是郭震OpenClaw龙虾使用有一段时间了,体感很好,即便使用本地模型,如Qwen3.5:9B这样的模型,养虾Token自由,回复也比较丝滑。如下所示,轻松生成HTML风格的文件结构树:也能轻松生…...
)
Sentaurus TCAD实战:手把手教你提取NPN三极管的Gummel-Poon模型参数(SPICE建模必备)
Sentaurus TCAD实战:从Gummel曲线到SPICE模型参数的完整提取流程 在半导体器件设计与电路仿真中,准确的三极管模型参数是确保仿真结果可靠性的关键。传统方法往往依赖器件手册提供的典型参数,但针对特定工艺定制的器件,这些参数可…...

【优化求解】一种用于边缘计算中协作回归学习的分布式ADMM方法附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室👇 关注我领取海量m…...

利欧股份持续推进“制造业+科技投资”战略 主业与投资协同效应显现
全球商业航天企业SpaceX(太空探索技术公司)计划于6月12日在纳斯达克上市,股票代码为SPCX。此次IPO预计融资规模约为800亿美元,市场估值在1.75万亿至2万亿美元之间,引发资本市场广泛关注。据悉,利欧股份&…...

量子同态加密:理论与实践的突破
1. 量子同态加密:理论与实践的桥梁量子同态加密(Quantum Homomorphic Encryption, QHE)是密码学领域的一项突破性技术,它允许在加密的量子数据上直接执行任意量子计算,而无需事先解密。这项技术对于构建真正隐私保护的…...