ORB-SLAM3复现过程中遇到的问题及解决办法
在复现过程中遇到的问题的解决过程
- 1. 版本检查
- 1.1 Opencv版本的检测
- 1.2 Eigen版本的检测
- 1.3 查看Python版本
- 1.4 其他
- 2. 编译过程中遇到的问题及解决办法
- 2.1 ./build.sh遇到的问题
- 2.2 ./build_ros.sh遇到的问题
因为环境比较干净,所以遇到的问题相对少一些,不过每一个问题都进行了完善的解决
我的环境是刚装完Ubuntu20.04之后,并进行了Ubuntu系统安装之后首需要做的事情的操作之后的一个环境。
1. 版本检查
因为ORB-SLAM3对环境的要求和ORB-SLAM2有一些不一样,有的版本过低是会导致错误的。
所以,在开始之前,先来检测一下自己环境中的库的版本。
注意:使用的是Ubuntu20.04
1.1 Opencv版本的检测
执行以下命令,可以发现版本为4.2.0
pkg-config --modversion opencv
# 4.2.0
//或者
opencv_version
# 4.2.0
1.2 Eigen版本的检测
执行以下命令:
whereis eigen3
# 我的是在/usr/include/eigen3
gedit /usr/include/eigen3/Eigen/scr/Core/util/Macros.h
文件开头的几行如下所示,意味着我的Eigen版本为3.3.7
#ifndef EIGEN_MACROS_H
#define EIGEN_MACROS_H#define EIGEN_WORLD_VERSION 3
#define EIGEN_MAJOR_VERSION 3
#define EIGEN_MINOR_VERSION 71.3 查看Python版本
- 执行以下命令:
xiaoduan@fighter:~$ python3 --version
Python 3.8.10
- 也可以在终端输入python接着连着按两下tab键,也能看到自己的python版本。
1.4 其他
- 在c++方面,我的是C++11。
- DBoW2 and g2o在项目文件中直接存在,无需手动安装,在编译的过程中会自动安装。
- Pangolin还没有安装。
2. 编译过程中遇到的问题及解决办法
2.1 ./build.sh遇到的问题
1. 问题一:
出现下图所示错误:
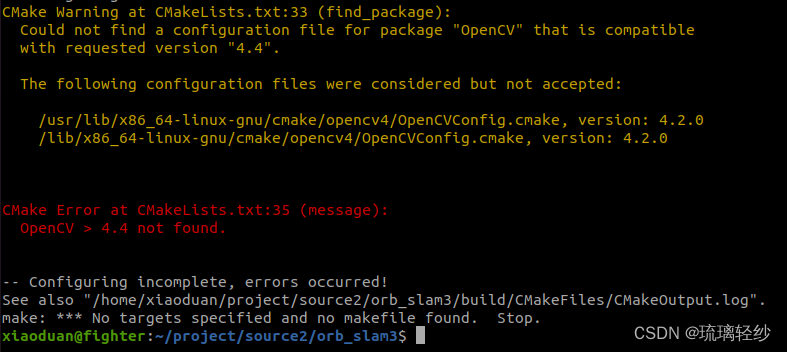
原因分析:
版本不匹配,所以更改版本即可。
解决办法:
打开文件/home/xiaoduan/project/source2/orb_slam3/CMakeLists.txt
更改以下两个内容:
- 第33行Opencv的版本改为4
- 第41行Eigen的版本改为3
2. 问题二:
错误展示:
‘slots_reference’ was not declared in this scope 1180 | cow_copy_type<list_type, Lockable>
原因分析:
因为我的是C++11,这里C++ 11 不支持本项目的一些编译,把 C++版本换到 C++14 就可以了
解决办法:在终端输以下命令
sed -i 's/++11/++14/g' CMakeLists.txt
3. 问题三:
错误展示:
./Monocular/mono_euroc: error while loading shared libraries: libpango_windowing.so: cannot open shared object file: No such file or directory
原因分析:
原因一:运行的文件夹位置不对,注意看自己运行命令时的位置,保证能够找到运行的文件。
原因二:配置文件没生效
解决办法:
针对第一种情况,只需要cd到对应的文件夹中即可。针对第二种情况,执行以下命令即可:
sudo ldconfig
2.2 ./build_ros.sh遇到的问题
1. 问题一:
错误展示:
Error: the rosdep view is empty: call ‘sudo rosdep init‘ and ‘rosdep update‘
原因分析:
因为ROS是一键安装的,所以rosdep没有进行初始化,所以只需要执行终端报错中的提示语句即可
解决办法:
执行以下命令:
sudo rosdep fix-permissions
sudo rosdep init
rosdep update
注意: 在这个过程中可能会由于网络问题,总是不成功,所以多进行几遍就好了。如果实在不行运行一个sudo apt install python2在重新执行。
2. 问题二:
错误展示:
‘slots_reference’ was not declared in this scope 1180 | cow_copy_type<list_type, Lockable>
原因分析:
版本不匹配,所以更改版本即可。
解决办法:
打开文件/home/xiaoduan/project/source2/orb_slam3/Examples_old/ROS/ORB_SLAM3/CMakeLists.txt
更改以下两个内容:
- 第33行Opencv的版本改为4
- 第41行Eigen的版本改为3
3. 问题三:
错误展示:
fatal error: sophus/se3.hpp: No such file or directory
29 | #include <sophus/se3.hpp>
原因分析:
找不到sophus文件的位置,添加即可。
解决办法:
打开文件
/home/xiaoduan/project/source2/orb_slam3/Examples_old/ROS/ORB_SLAM3/CMakeLists.txt
第49行加入
${PROJECT_SOURCE_DIR}/../../../Thirdparty/Sophus
4. 问题四:
错误展示:
/usr/local/include/sigslot/signal.hpp:1180:65: error: ‘slots_reference’ was not declared in this scope cow_copy_type<list_type, Lockable> ref = slots_reference();
原因分析:
因为我的是C++11,这里C++ 11 不支持本项目的一些编译,把 C++版本换到 C++14 就可以了
解决办法:
在终端输以下命令
sed -i 's/++11/++14/g' CMakeLists.txt
5. 问题五:
错误展示:
4. 问题四:
错误展示:
/usr/local/include/sigslot/signal.hpp:1180:65: error: ‘slots_reference’ was not declared in this scope cow_copy_type<list_type, Lockable> ref = slots_reference();
原因分析:
Sophus::SE3f, cv::MAT,Eigen::Vector3f类型转换报错,应该是不能直接转换,不过可以换个办法
解决办法:在终端输以下命令
sed -i 's/++11/++14/g' CMakeLists.txt
原因分析:
因为我的是C++11,这里C++ 11 不支持本项目的一些编译,把 C++版本换到 C++14 就可以了
解决办法:
解决办法参考文章ORB-SLAM3复现的详细过程——配置安装及ROS和脚本运行—Ubuntu20.04中的2.4。按照2.4的步骤进行修改源码即可。
至此,就是我遇到的所有的问题。
相关文章:
ORB-SLAM3复现过程中遇到的问题及解决办法
在复现过程中遇到的问题的解决过程 1. 版本检查1.1 Opencv版本的检测1.2 Eigen版本的检测1.3 查看Python版本1.4 其他 2. 编译过程中遇到的问题及解决办法2.1 ./build.sh遇到的问题2.2 ./build_ros.sh遇到的问题 因为环境比较干净,所以遇到的问题相对少一些…...

vue开发桌面exe应用
vue开发桌面exe应用 Electron-vue 参考 Electron-vue搭建vue全家桶Element UI客户端(一) 如何使用Vue.js构建桌面应用程序...

C# 实现PictureBox从随机选择的文件夹内对图像进行随机播放
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System...
腾讯云国际代充-GPU服务器安装驱动教程NVIDIA Tesla
腾讯云国际站GPU 云服务器是基于 GPU 的快速、稳定、弹性的计算服务,主要应用于深度学习训练/推理、图形图像处理以及科学计算等场景。 GPU 云服务器提供和标准腾讯云国际 CVM 云服务器一致的方便快捷的管理方式。 GPU 云服务器通过其强大的快速处理海量数据的计算性…...
【python爬虫】9.带着小饼干登录(cookies)
文章目录 前言项目:发表博客评论post请求 cookies及其用法session及其用法存储cookies读取cookies复习 前言 第1-8关我们学习的是爬虫最为基础的知识,从第9关开始,我们正式打开爬虫的进阶之门,学习爬虫更多的精进知识。 在前面几…...

原神剑冢三层封印怎么解开 原神剑冢三层封印在哪里打
在原神游戏中原神探索剑冢封印并解开三层封印,玩家可以去蒙德城接取一个隐藏任务,这项任务需要玩家去解开剑冢三层封印,才能完成任务。然而,许多玩家可能还不知道如何解开这个封印,今天小编为大家整理了一份详细的攻略…...
)
Papers with Semi-supervised Learning for Medical Image Segmentation(SSL4MIS)
Papers_with_SSL4MIS CVPR2023 DateCategory标题TitleCodeBlog2023-06半监督医学图像分割用于半监督医学图像分割的伪标签引导对比学习Pseudo-Label Guided Contrastive Learning for Semi-Supervised Medical Image SegmentationLinkLink2023-06半监督图像分割SemiCVT&#…...

c#继承(new base)的使用
概述 C#中的继承是面向对象编程的重要概念之一,它允许一个类(称为子类或派生类)从另一个类(称为父类或基类)继承属性和行为。 继承的主要目的是实现代码重用和层次化的组织。子类可以继承父类的字段、属性、方法和事…...

【办公自动化】使用Python批量处理Excel文件并转为csv文件
🤵♂️ 个人主页:艾派森的个人主页 ✍🏻作者简介:Python学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞Ǵ…...
手机怎么剪视频?分享一些剪辑工具和注意事项
视频剪辑是一种将多个视频片段进行剪切、合并和编辑的技术,它可以帮助我们制作出精彩的视频作品。如今,随着智能手机的普及,我们可以随时随地使用手机进行视频剪辑。本文将为大家介绍一些手机剪辑工具和注意事项,帮助大家更好地进…...

面试题汇总
文章目录 一. 腾讯二. 华为三. 快手1. Long 的长度和范围,为什么要减 1 (Java基础)2. 线程池配置无界队列了之后,拒绝策略怎么搞,什么时候用到无界队列 (JUC并发) 四. 美团五. 阿里六. 百度七. 字节八. 大疆1. 为什么创建进程开销比线程大? …...

LLVM系列:1.设计思想和LLVM IR简介
文章目录 背景介绍内容简介LLVM库的集合以及模块化设计LLVM优化器的模块化设计LLVM代码生成器的模块化设计LLVM IRLLVM编译流程LLVM IR的设计思想LLVM的形式LLVM IR的结构组成指令格式和变量示例参考文献:背景介绍 LLVM项目于2000年创立于伊利诺斯州大学,原本是一个为了静态…...

mysql中间件Atlas
Mysql 的 proxy 中间件有比较多的工具,例如,mysql-proxy(官方提供), atlas , cobar, mycat, tddl, tinnydbrouter等等。 而Atlas是由 Qihoo 360公司Web平台部基础架构团队开发维护的一个基于MySQL协议的数据中间层项目。它在MySQL官方推出的MySQL-Pro…...
ChatGPT 实现动态地图可视化展示
地图可视化分析有许多优点和好处: 1.直观理解:地图可视化使得复杂的数据更易于理解。通过地图可视化,人们可以直观地看到地理位置、地区之间的关系以及空间分布的模式。 2.提高决策效率:地图可视化可以帮助决策者快速理解和解释数据,从而提高决策效率。 3.高效的数据整…...
Vue.js安装步骤和注意事项
安装完node.js后开始安装和部署Vue在检查webpack的下载版本时出现错误出现错误的原因是之前下载时未指定对应的版本号导致版本不兼容先卸载掉之前下载的版本 cnpm uninstall webpack-cli -g cnpm install webpack-cli4.9.2 -g 最后检查版本是否对应...
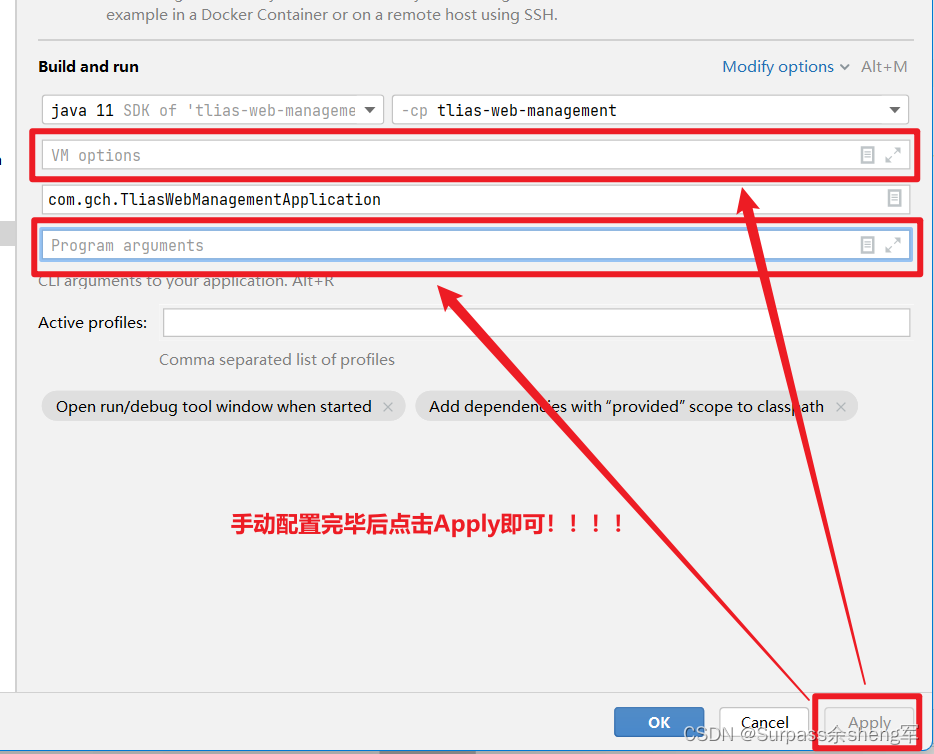
IDEA中Run/Debug Configurations添加VM options和Program arguments
1. 现象描述 我在我的IDEA当中打开配置模板后,发现没有VM options和Program arguments,也就是虚拟机选项和程序实参这两项,导致我不能配置系统属性参数和命令行参数!!!!!࿰…...
)
信息技术03--初/高中--简答题(73道知识简答)
文章目录 第一章 初中简答 1-231.1、请简要回答TCP/IP中传输层的功能以及两种主要协议1.2、请简要回答”数字化学习与创新“主要体现在哪些方面?1.3、人工智能给人类社会带来了巨大的变化也带来了一些问题,请列举出三个涉及个人隐私问题的场景并进行简要…...

Matlab之统计一维数组直方图 bin 计数函数histcounts
一、语法 [N,edges] histcounts(X) [N,edges] histcounts(X,nbins) [N,edges] histcounts(X,edges) 解释: 1.1 [N,edges] histcounts(X) 将 X 的值划分为多个 bin,并返回每个 bin 中的计数以及 bin 边界。histcounts 函数使用自动分 bin 算法&am…...

TDengine函数大全-时间和日期函数
以下内容来自 TDengine 官方文档 及 GitHub 内容 。 以下所有示例基于 TDengine 3.1.0.3 TDengine函数大全 1.数学函数 2.字符串函数 3.转换函数 4.时间和日期函数 5.聚合函数 6.选择函数 7.时序数据库特有函数 8.系统函数 时间和日期函数 TDengine函数大全NOWTIMEDIFFTIMETRU…...
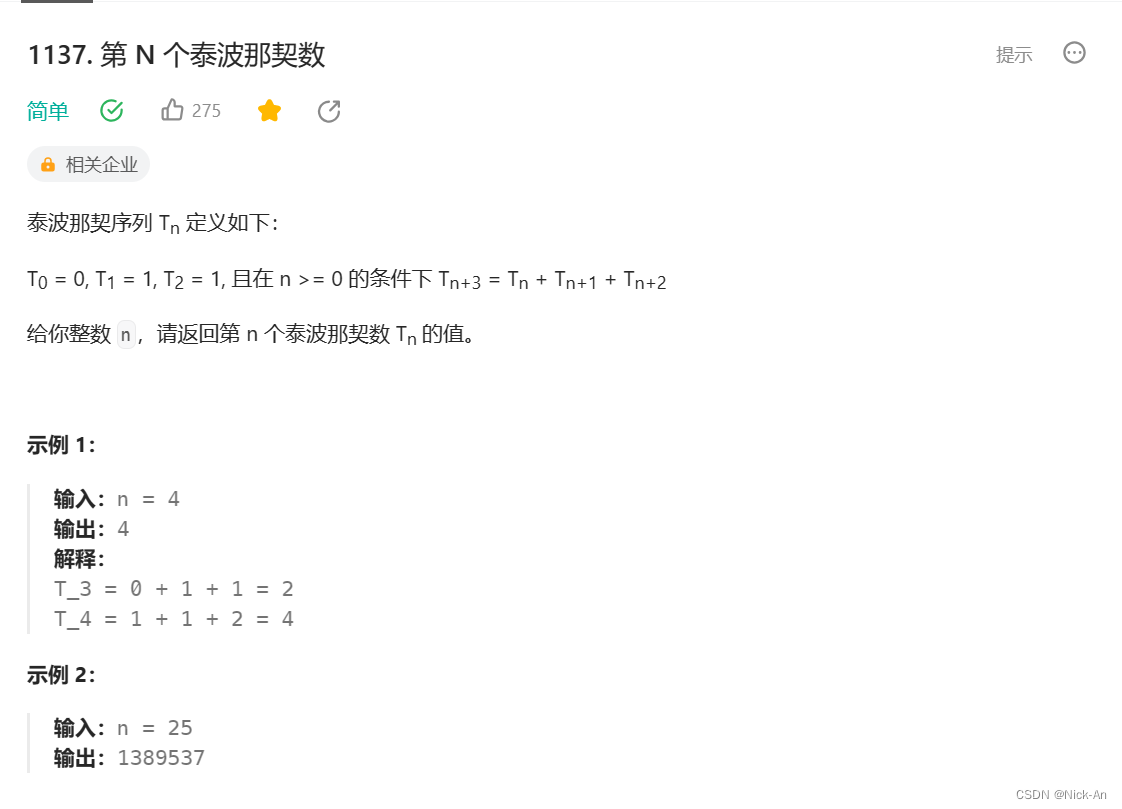
算法笔记——路径问题
在引入介绍如何写一个算法的时候,我们先引入一个题作为例子 1137. 第 N 个泰波那契数 - 力扣(LeetCode) 作为刚开始学习算法的我们,看到这个题目的时候,应该想好以下的问题: 1.状态表示 我们要用什么来表…...
)
别再死磕公式了!用Python+SymPy从零推导6轴机械臂的DH参数与正逆解(附完整代码)
用PythonSymPy自动化推导6轴机械臂运动学:从DH参数到八组逆解实战 机械臂运动学分析是机器人开发中最烧脑的环节之一。传统手工推导DH参数矩阵不仅容易出错,验证过程更是令人崩溃——想象一下,当你花了两天时间推导出十几页公式,…...

MAX32630FTHR平台RF95 LoRa精简移植实战
1. RadioHead库深度解析:面向MAX32630FTHR平台的RF95 LoRa通信精简移植 1.1 项目定位与工程价值 RadioHead并非官方标准协议栈,而是由Airspayce公司开发的一套轻量级、跨平台无线通信抽象库。其设计哲学强调“最小可行通信”——不追求协议完备性&#…...

如何降低ai率?盘点3个降ai率神器与5个手改技巧,降aigc全流程解析!
最近我发现很多同学都在苦恼ai率这件事,后台发来的截图里,那报告,简直红得触目惊心。 现在的系统早已是next level,不是看你用了什么词,而是在分析你的文本生成逻辑。今天这篇文章,我不讲虚的,…...

Phi-4-reasoning-vision-15B部署教程:开源大模型镜像适配国产GPU方案
Phi-4-reasoning-vision-15B部署教程:开源大模型镜像适配国产GPU方案 1. 模型介绍 Phi-4-reasoning-vision-15B是微软推出的视觉多模态推理模型,具备强大的图像理解和分析能力。这个15B参数规模的模型特别擅长处理需要结合视觉和语言理解的复杂任务。 …...

springboot+vue基于web的网上考试系统的设计系统
目录同行可拿货,招校园代理 ,本人源头供货商系统功能模块划分题库管理模块在线考试模块自动阅卷模块技术实现要点扩展功能建议项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作同行可拿货,招校园代理 ,本人源头供货商 系统功能模…...

免费开源Sunshine游戏串流服务器终极指南:打造你的专属云游戏平台
免费开源Sunshine游戏串流服务器终极指南:打造你的专属云游戏平台 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 想要在任何设备上畅玩PC游戏,却受限于硬件…...

系统架构设计师常见高频考点总结之计算机网络
学习这些网络题目时,可以将网络层次结构想象成高速公路系统:核心层是连接城市的大型立交桥和主干道,追求极速转发;汇聚层是出口闸机,负责检查通行证(安全过滤)和分流;而接入层则是通…...

comsol的单相变压器绕组及铁芯振动形变仿真模型 1、单相变压器组振动形变模型:绕组在漏磁场...
comsol的单相变压器绕组及铁芯振动形变仿真模型 1、单相变压器组振动形变模型:绕组在漏磁场的洛伦兹力作用下振动,在长期作用下发生位移形变 2、单相变压器铁芯振动形变模型:铁芯在磁致伸缩作用下发生振动形变 注:时域仿真可以设置观察点,导出随时间变化…...

别再只会用百度搜了!手把手教你用site语法精准锁定CSDN、知乎等网站的技术文章
技术搜索的艺术:用site语法打造高效信息获取系统 每次打开搜索引擎,输入技术关键词后,铺天盖地的结果中真正有用的内容却寥寥无几——这可能是大多数开发者都经历过的困扰。广告推广、低质量转载、过时教程混杂其中,而真正优质的C…...

Wan2.2-I2V-A14B部署教程:解决OOM/驱动报错/端口冲突三大常见问题
Wan2.2-I2V-A14B部署教程:解决OOM/驱动报错/端口冲突三大常见问题 1. 镜像概述与核心优势 Wan2.2-I2V-A14B是一款专为文生视频任务优化的私有部署镜像,特别针对RTX 4090D 24GB显存配置进行了深度优化。这个镜像最大的特点是解决了AI视频生成领域常见的…...