一种改进多旋翼无人机动态仿真的模块化仿真环境研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码、Simulink实现

💥1 概述
多旋翼无人机(UAV)由于其多功能性和机械简单性而在研究和商业应用中都获得了极大的普及。然而,尽管有这些优势,多旋翼系统在设计保证安全可靠飞行性能的强大控制架构方面仍然是一个相当大的挑战。按照今天的惯例,制导、控制和导航算法(GNC)的设计主要在仿真中进行。为了保证在仿真环境中生成的控制解决方案与真实飞行性能之间的无缝转换,仿真应以足够的保真度再现真实世界的行为。
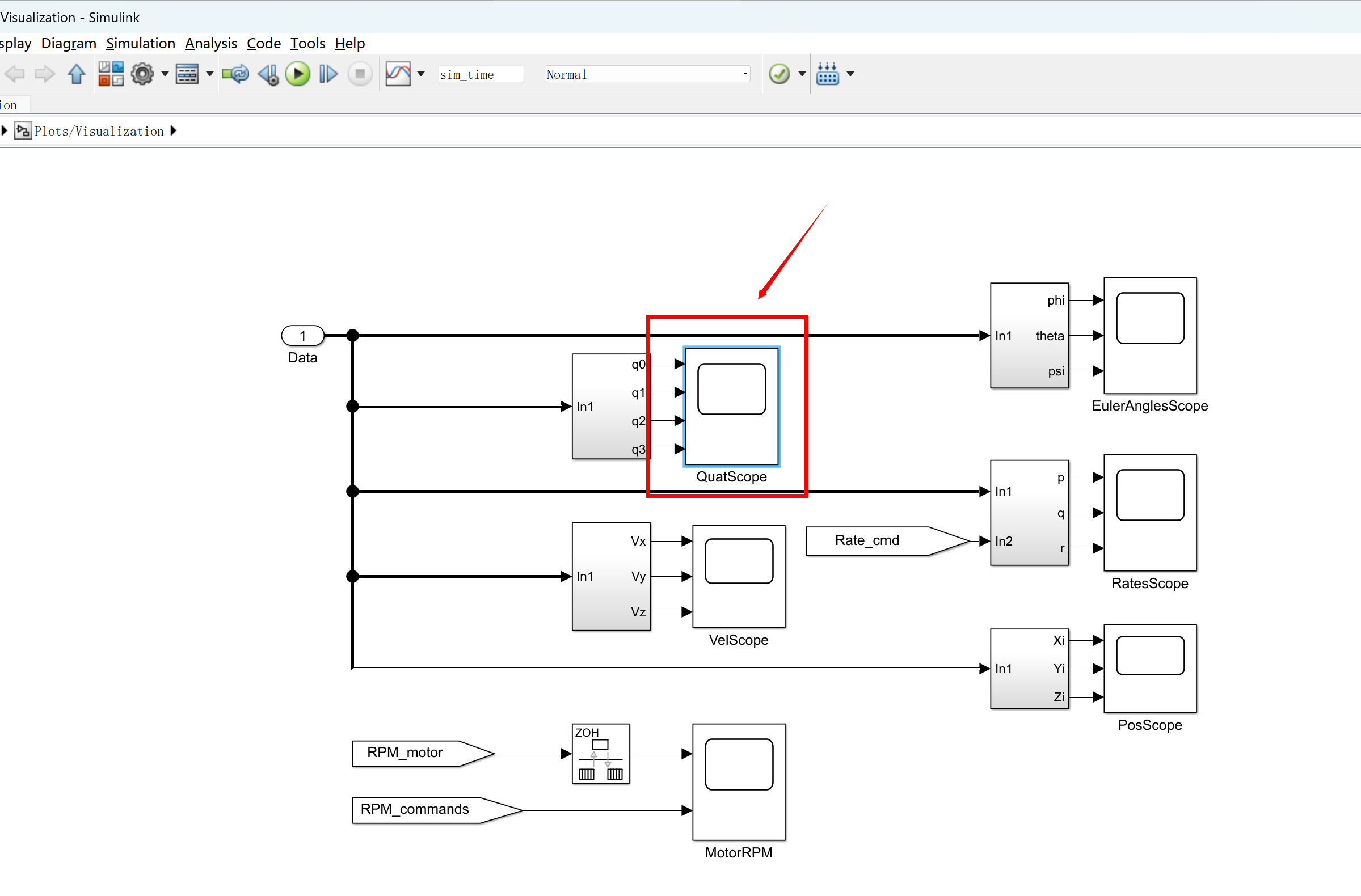
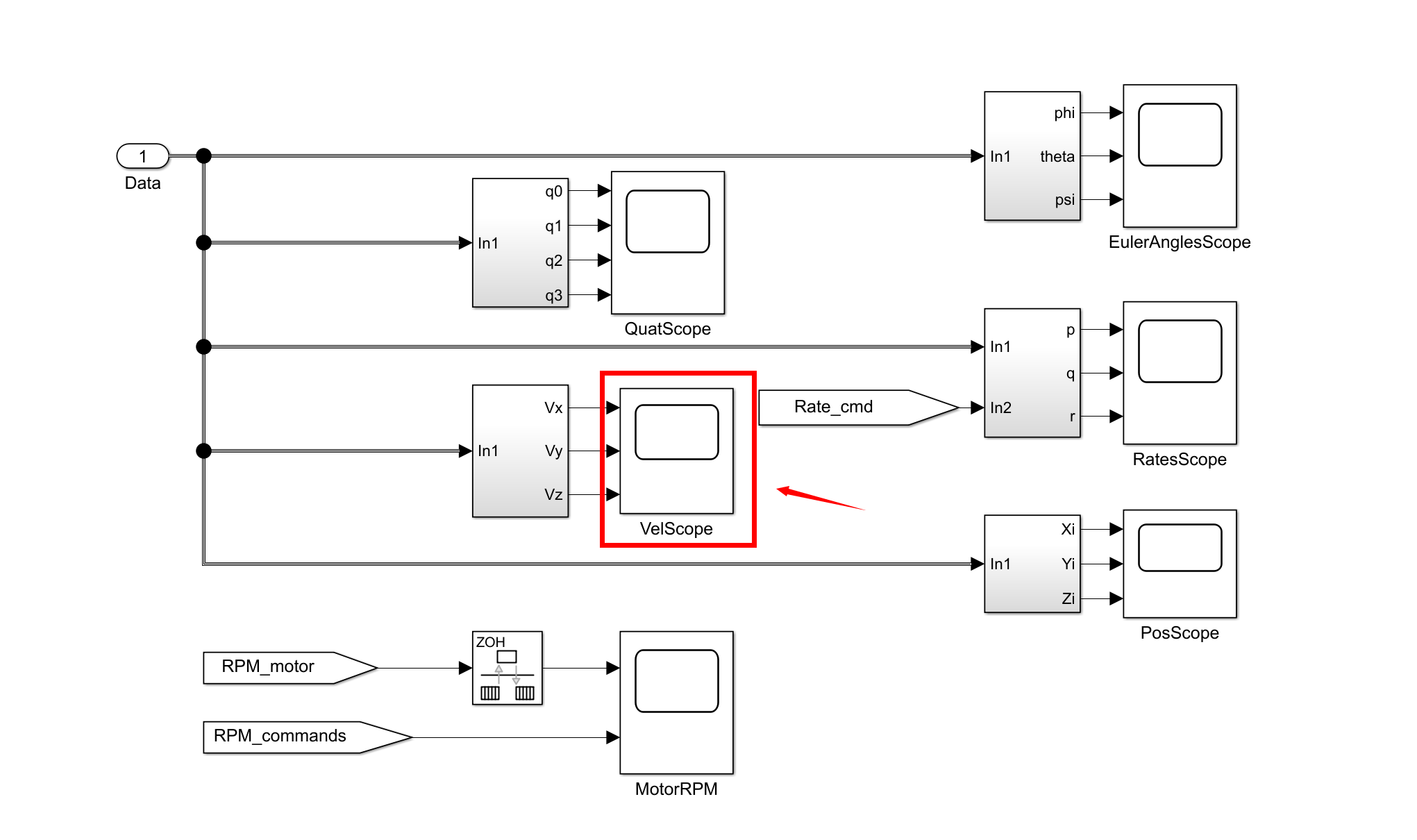
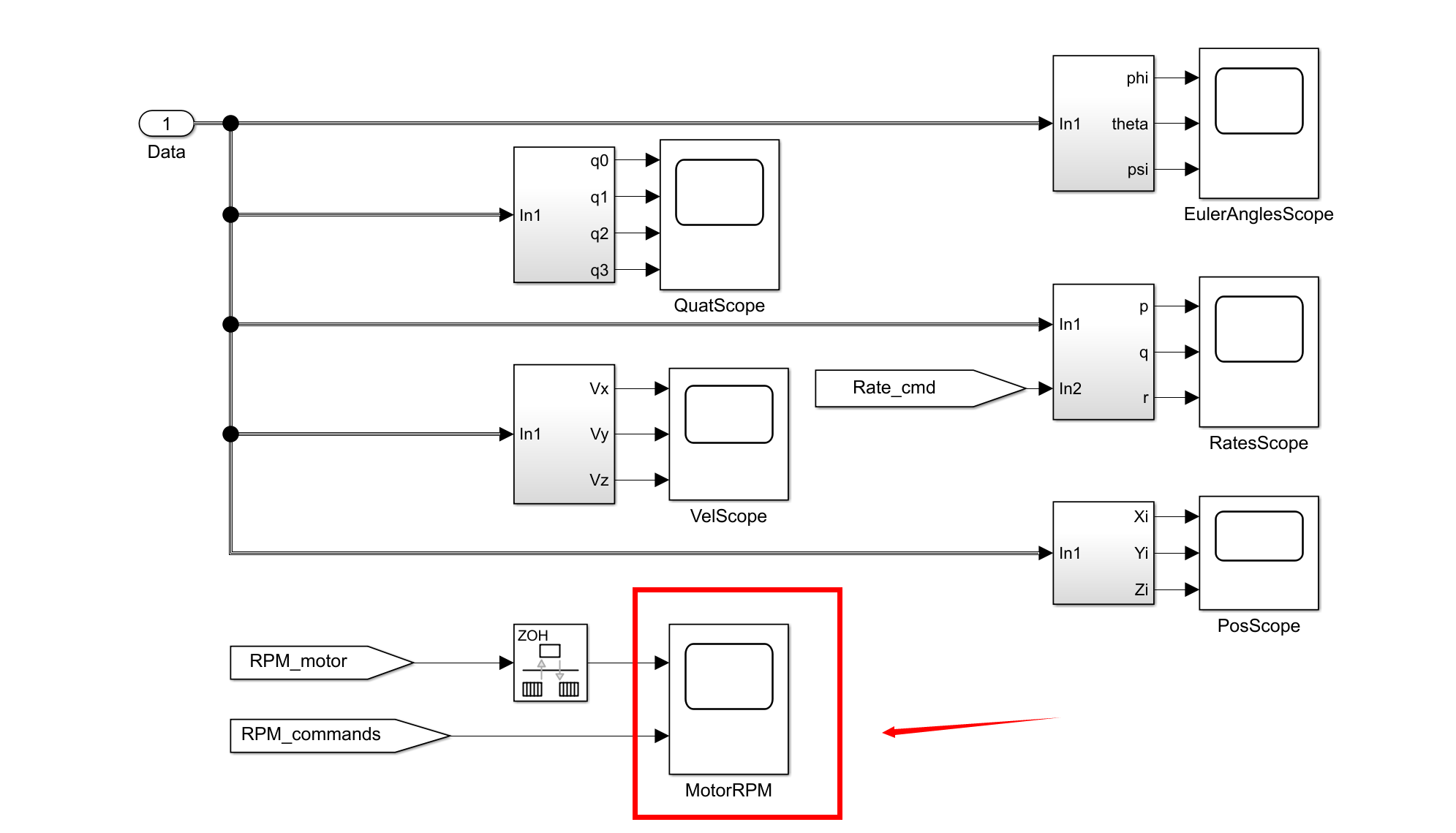
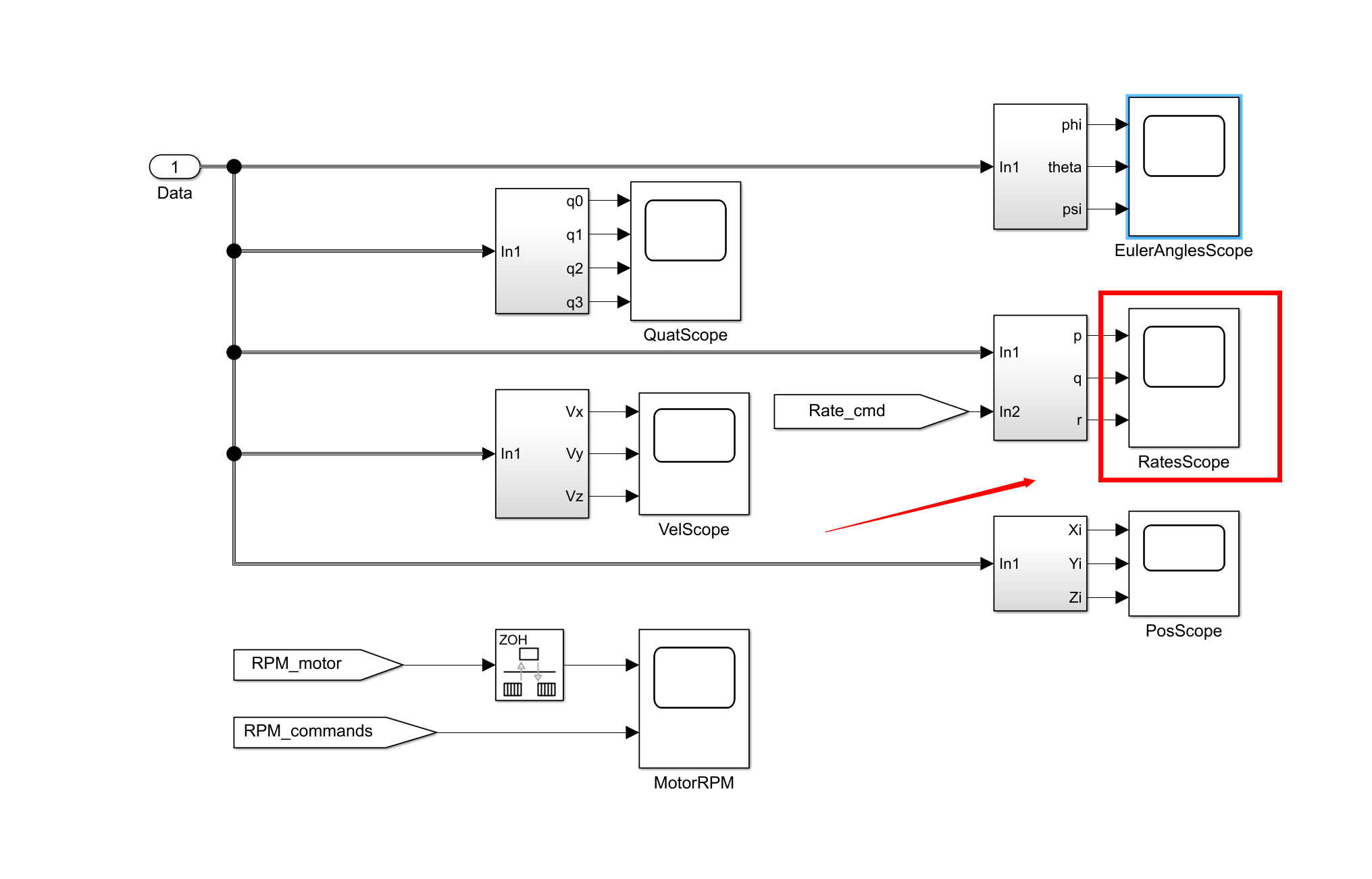
该仿真包括任意多旋翼无人机的改进动态模型。仿真非常模块化,允许用户指定几乎任何可以想象的多旋翼机身,无论对称性或特定布局如何。与在室外飞行真正的无人机相比,所包含的环境效果也有助于使模拟行为更自然。模拟包括随附论文文本中描述的所有场景。其中包括:任意非对称机身,改变机身质量或惯性矩或在飞行过程中引入执行器故障的能力,机身上的空气动力阻力,动态推力产生,不同的空气动力学螺旋桨模式,如涡环状态和叶片拍打效应。如果需要,用户可以关闭所有这些效果。
当前实现的控制器仅是内环角速率控制。由用户决定实施他们选择的更高级的控制方案。
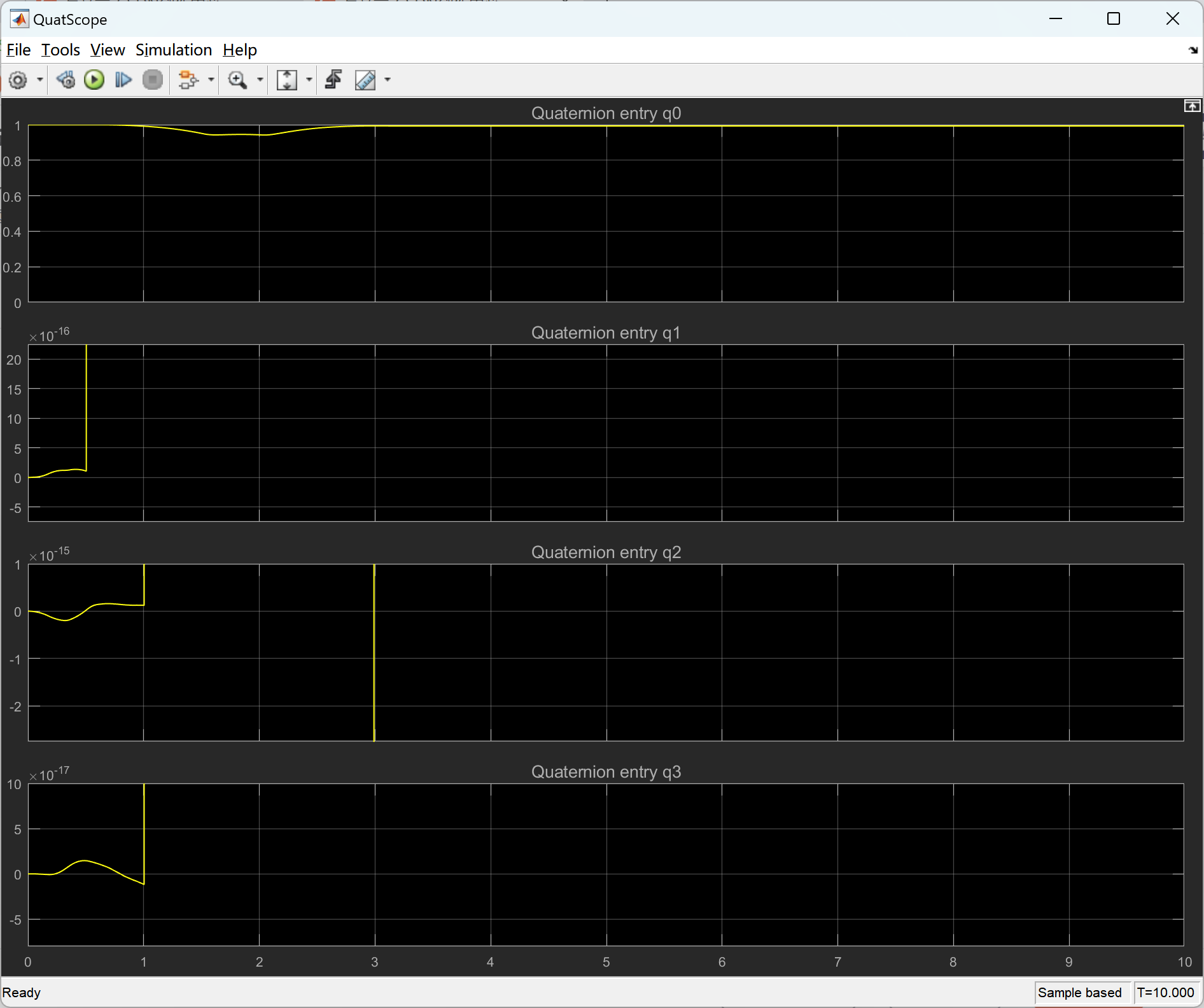
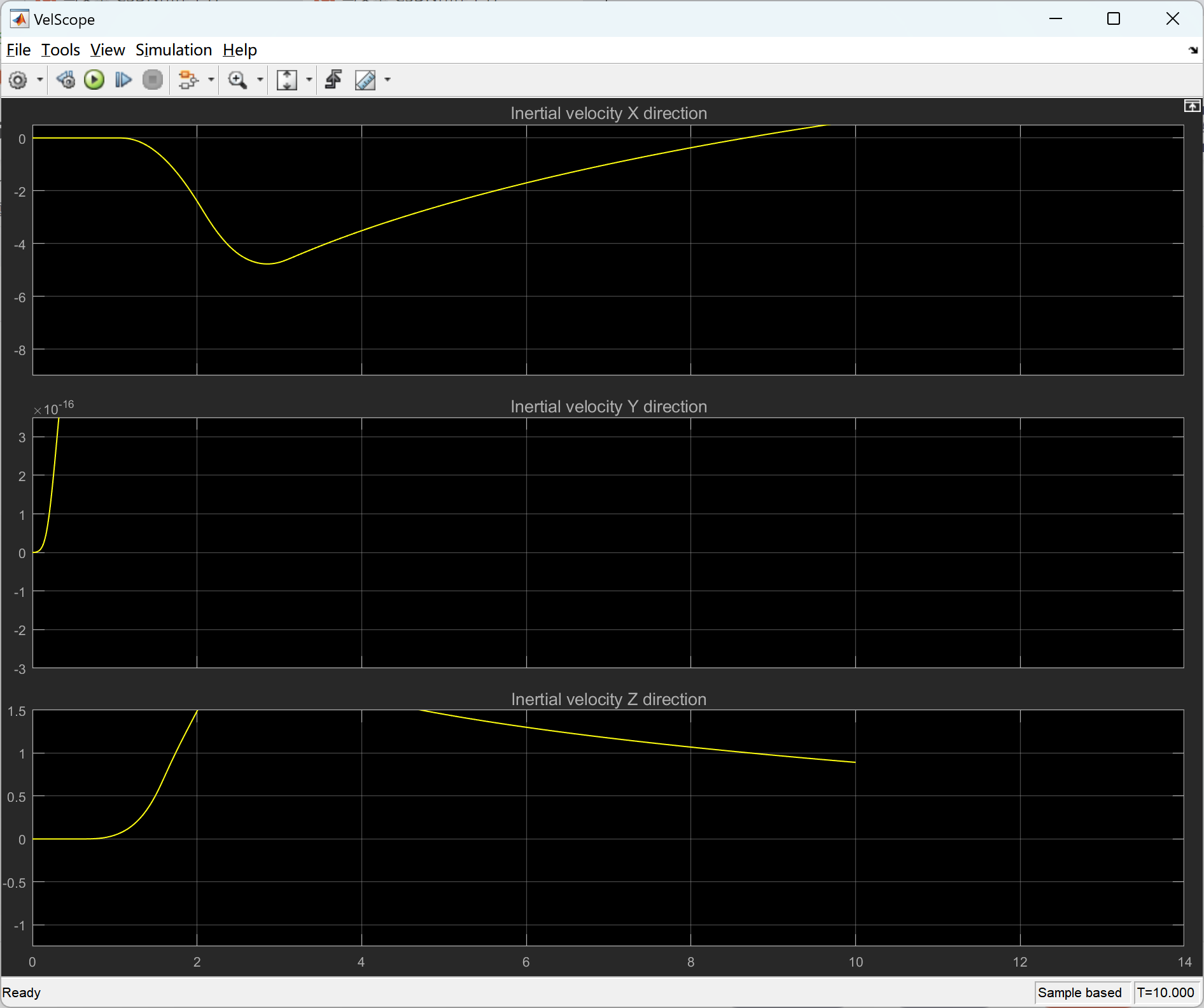
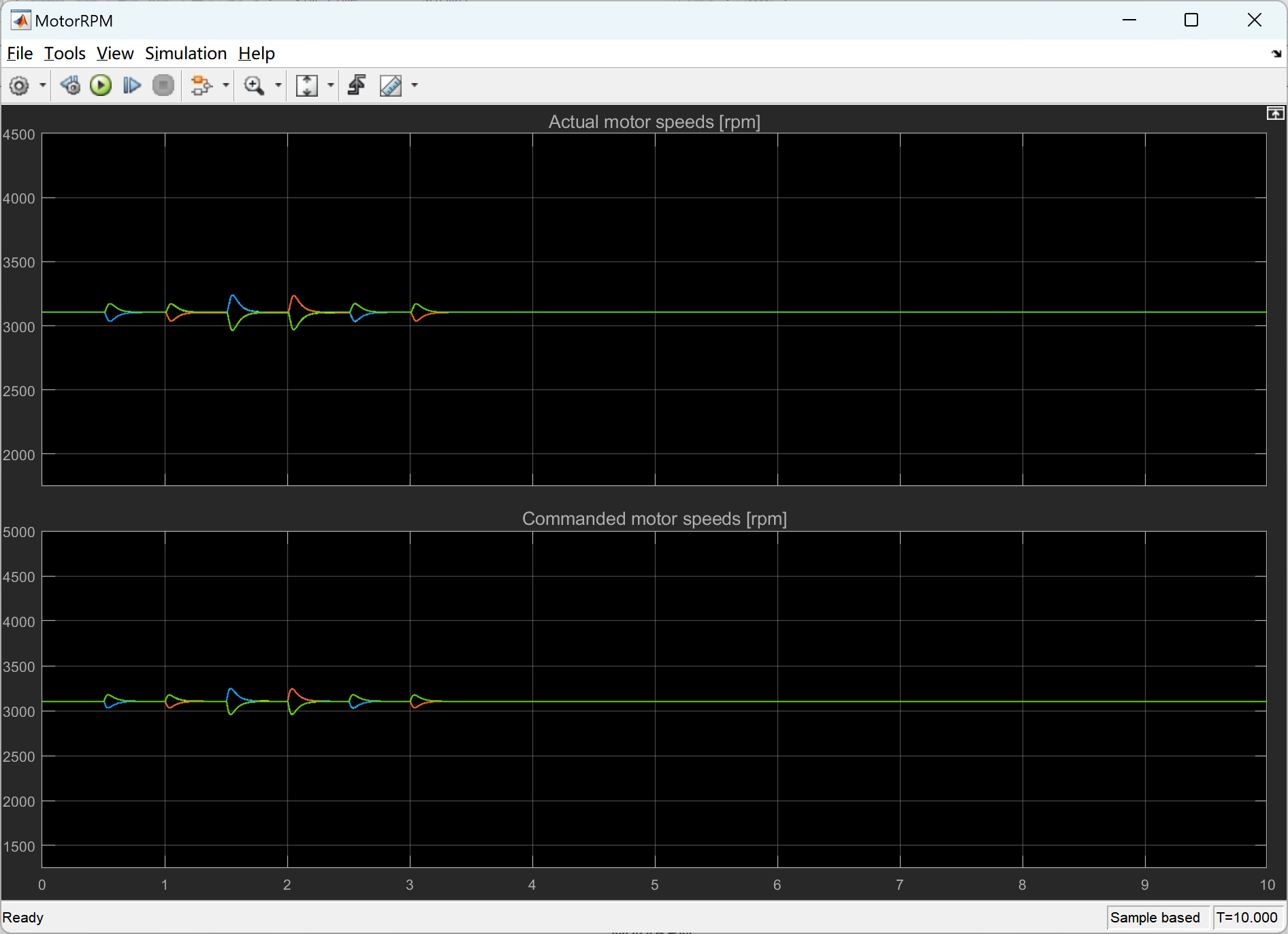
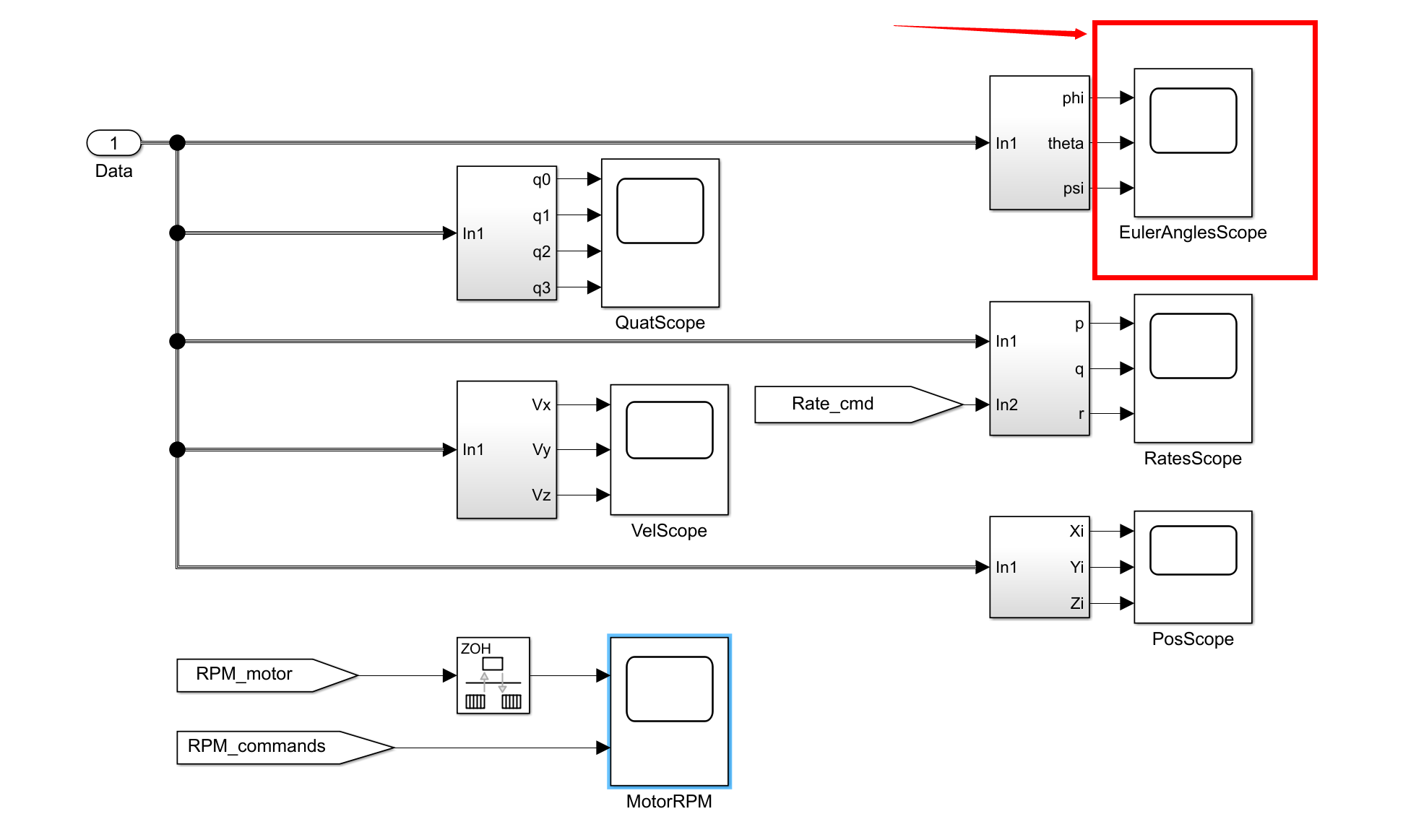
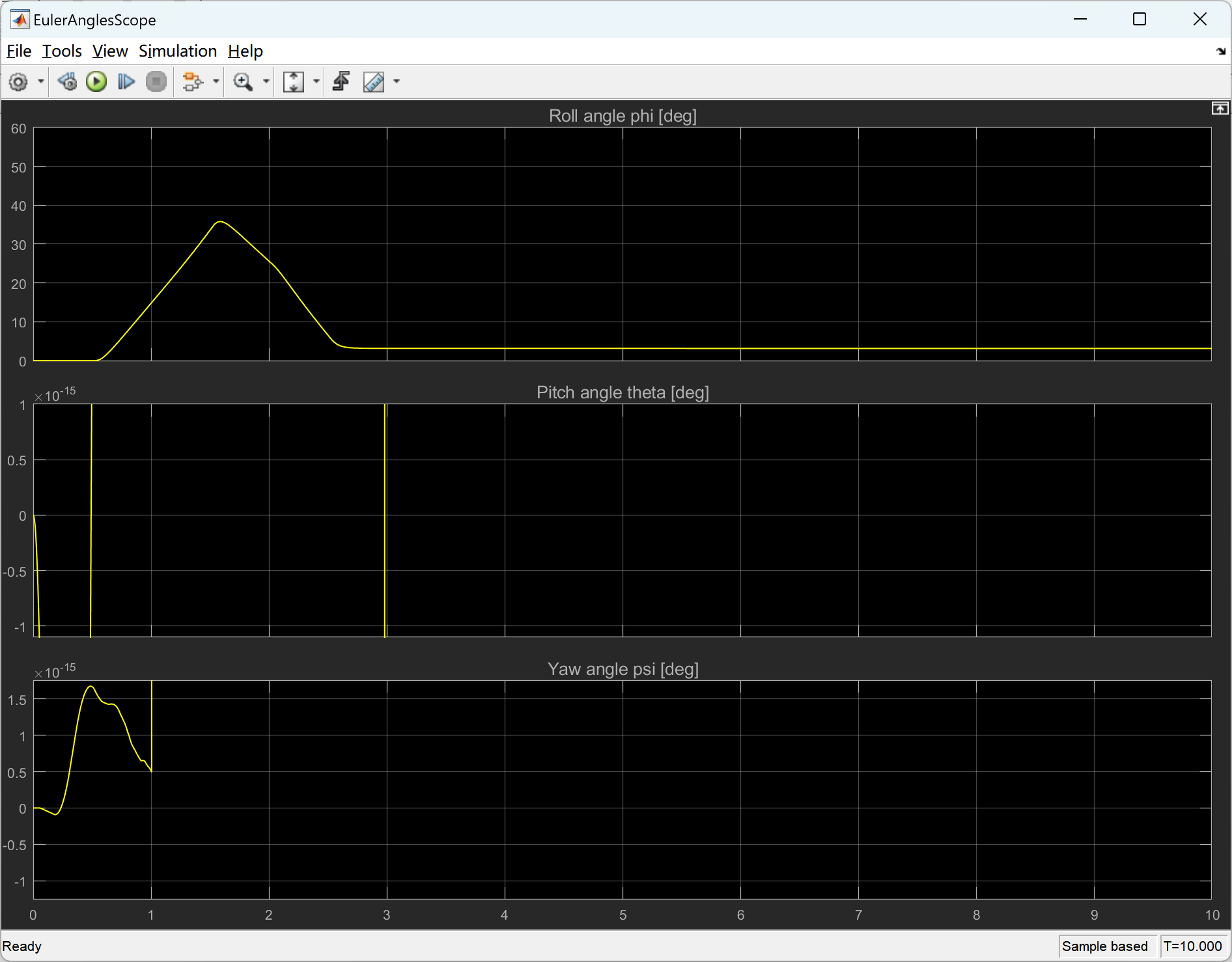
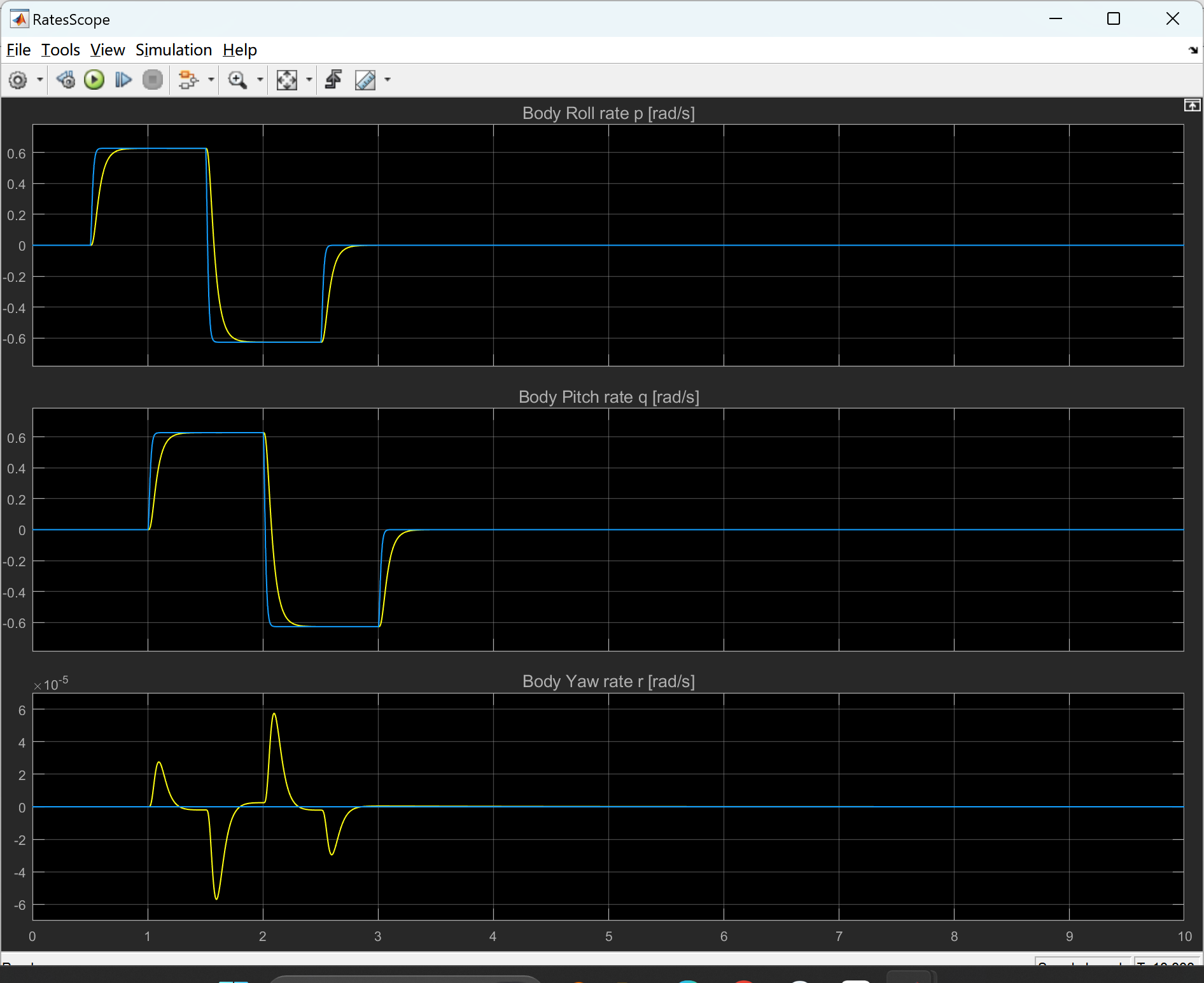
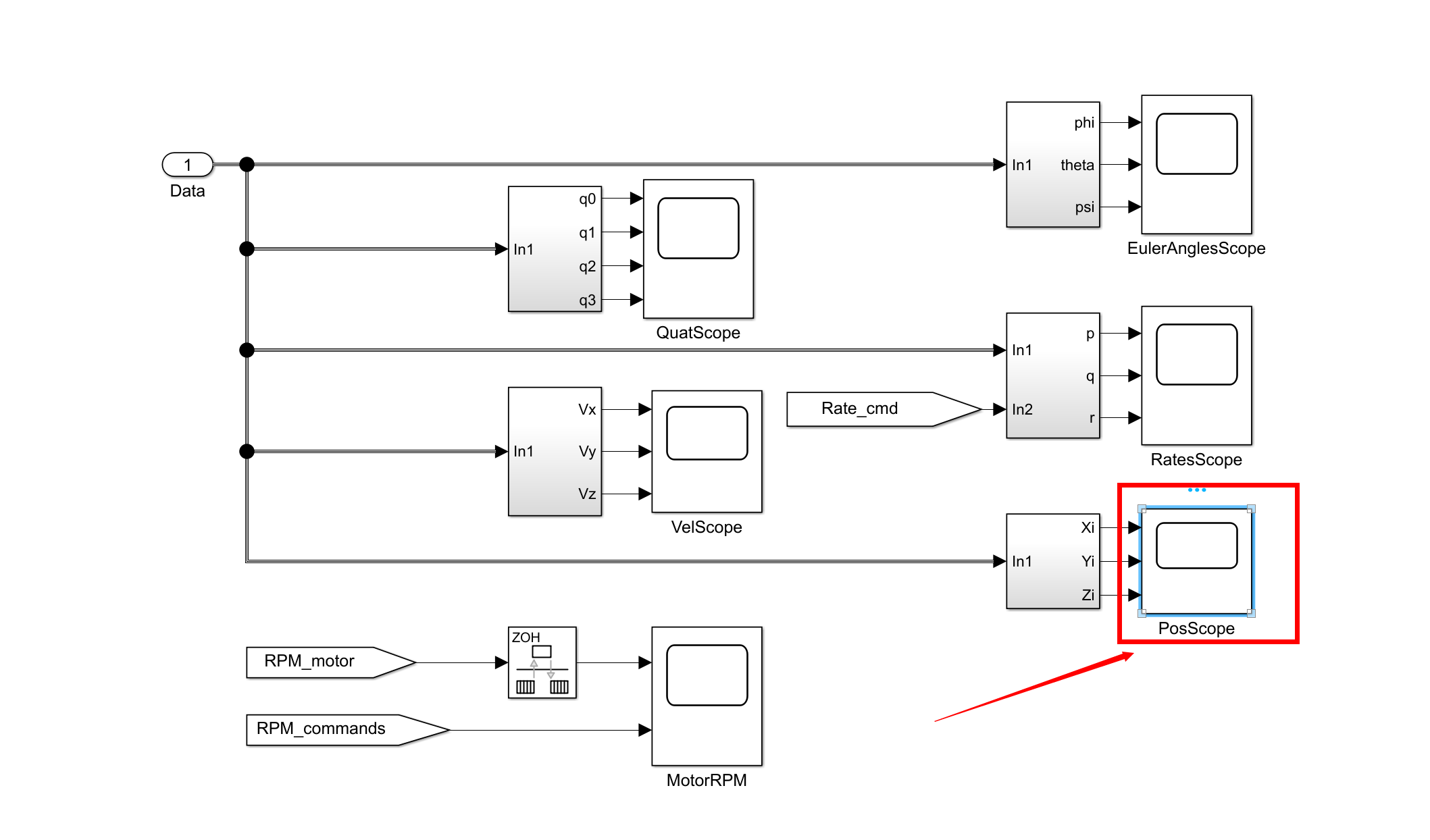
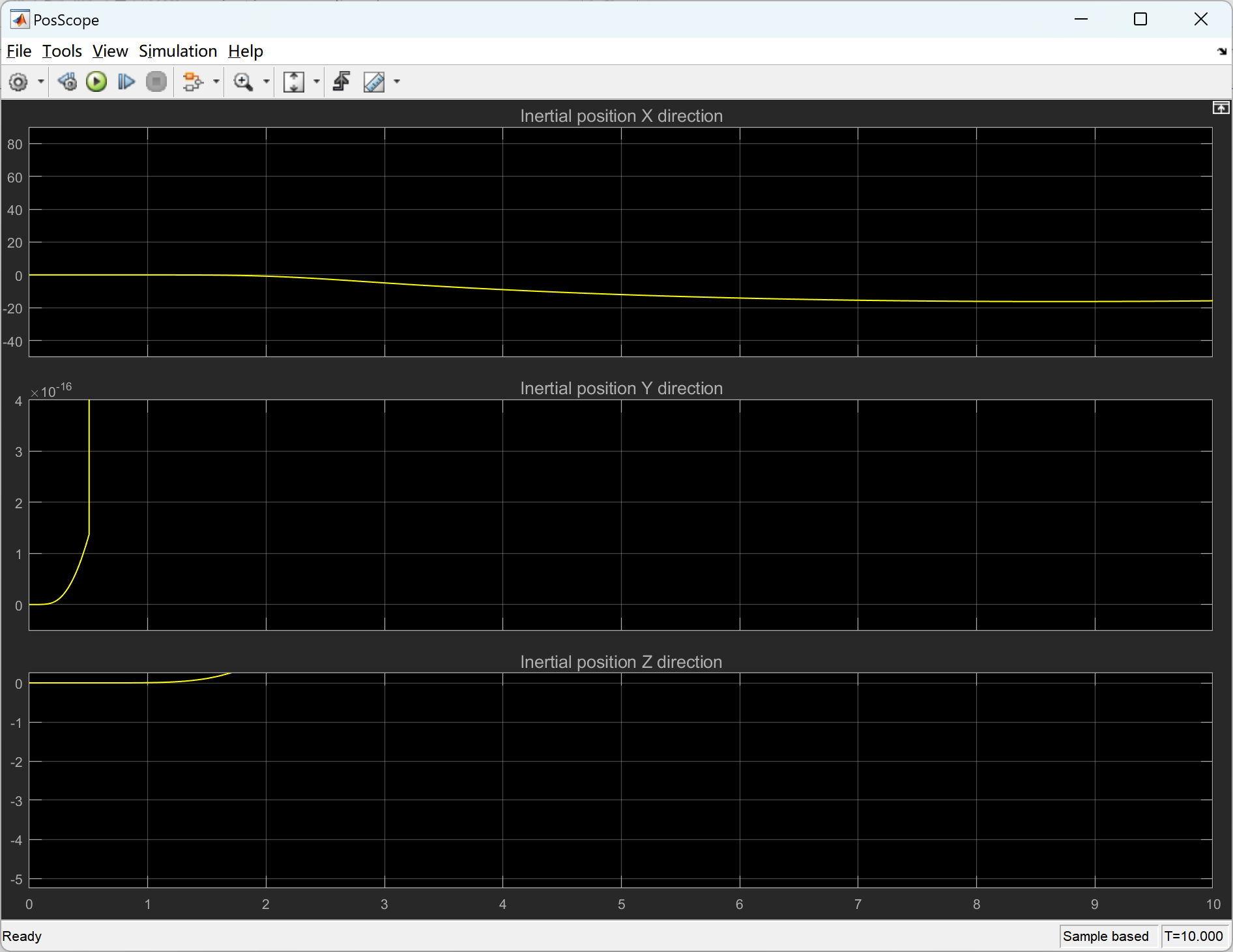
📚2 运行结果
部分代码:
clear all;close all;clc
%--------------------------------------------------------------------------
t_control = 1/500; % Controller/state estimation frequency 500Hz [s]
t_sim = t_control/2; % Simulation frequency 1000Hz [s]
sim_time = 10.0; % Duration of simulation [sec]
r2d = 180/pi; % Conversion factor radians to degrees [deg/rad]
d2r = pi/180; % Conversion factor degrees to radians [rad/deg]
g = 9.80665; % Acceleration of gravity [m/s^2]
rpm2radpersec = 2*pi/60; % Conversion factor RPM to rad/sec [rad/(s*rpm)]
rho = 1.225; % Density of air [kg/m^3]
%--------------------------------------------------------------------------
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Quad specific configuration parameters %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% The coordinate system used in this model is defined as follows:
% X: pointing forward, Roll axis
% Y: pointing to the right, Pitch axis
% Z: pointing down, Yaw axis
% To define the geometry of the airframe, the following convention is used:
% - the base airframe is assumed to be somewhat symmetric
% - the CoG for the base airframe coincides with the geometric center in X/Y plane (but is shifted along Z axis)
% - the motor arm length in X/Y plane is defined as the distance to the geometric center of the base airframe
% - motor thrust is generated at the prop, which is offset a distance (along Z) from the geometric center
% - motor thrust vector may be misaligned from purely Z direction, so a set of rotation angles is given for each motor
% - real position of CoG is given as a position vector from geometric center
% - everything is expressed in body coordinate system described above
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Noise_flag = 0; % Set to 1 for sensor/estimation noise, to 0 for no noise
Coriolis_correction = 1; % Set to 1 to cancel omega x (J*omega) term in control law, 0 if not
Dyn_thrust = 0; % Set to 1 to engage dynamic thrust effects, to 0 to disengage
Blade_flapping = 0; % Set to 1 to engage blade flapping effects, to 0 to disengage
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Initial conditions
Att_init = [0;0;0] * d2r; % Initial airframe attitude in Euler angles Roll/Pitch/Yaw for 6DOF block [deg]
omega_init = [0;0;0]; % Initial angular rates in Body frame for 6DOF block [rad/s]
Vb_init = [0;0;0]; % Initial velocity in Body frame for 6DOF block [m/s]
Xi_init = [0;0;0]; % Initial position in Inertial frame for 6DOF block [m]
rpm_init = 3104.5025852; % Initial motor speed [rpm]
q_init = rpy2quat(Att_init); % Compute the initial attitude quaternion
R_IB_init = rpy2rot(Att_init); % Compute the initial rotation matrix R_IB
Vi_init = R_IB_init' * Vb_init; % Compute the initial velocity in Inertial axes
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Parameters for aerodynamic drag computation
a = 0.060; % Surface area of airframe visible along the Body x axis [m^2]
b = 0.060; % Surface area of airframe visible along the Body y axis [m^2]
c = 0.060; % Surface area of airframe visible along the Body z axis [m^2]
C_D = 0.40; % Drag coefficient [dimensionless]
Surface_params = [a;b;c]; % Combine the surface area parameters
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Parameters for dynamic thrust computation
v_h = 4.0; % Induced aerodynamic velocity at hover [m/s]
kappa = 1.00; % Value for induced power factor in hover (chosen to make transition from different states continuous)
k1 = -1.125; % Empirical values taken from Hoffmann_2011
k2 = -1.372; % Empirical values taken from Hoffmann_2011
k3 = -1.718; % Empirical values taken from Hoffmann_2011
k4 = -0.655; % Empirical values taken from Hoffmann_2011
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Parameters for blade flapping computation
k_a1s = 1.5 / 4.0; % Gain in linear relationship between wind velocity and flapping angle [deg/(m/s)]
k_beta = 0.23; % Stiffness of the propeller blades [Nm/rad]
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Real airframe data
CoG_real = [0;0;0.001]; % Location of center of gravity w.r.t. geometric center (in Body axes) [m]
mass_real = 0.550; % Complete airframe mass [kg]
Jxx = 0.003960; %
Jxy = 0; %
Jxz = 0; %
Jyx = 0; %
Jyy = 0.003845; % Moment of inertia for multirotor w.r.t center of gravity [kg*m^2]
Jyz = 0; %
Jzx = 0; %
Jzy = 0; %
Jzz = 0.007350; %
J_real = [Jxx Jxy Jxz;Jyx Jyy Jyz;Jzx Jzy Jzz]; % Moment of inertia matrix
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% MotorMatrix_real holds all the information about the actual performance
% of each actuator. The data is arranged as one row per motor/prop combo:
% 1 : Motor arm angle measured clockwise (looking from above) from the positive X axis (forward direction) [deg]
% 2 : Distance of prop/motor in X/Y plane from the geometric center of the airframe [m]
% 3 : Distance of prop/motor in Z direction from the geometric center of the airframe [m]
% 4 : Direction of prop rotation: -1 for CW, +1 for CCW [unitless]
% 5 : Control effectiveness of the actuator (nominally 1.0)
% 6 : First-order motor transfer function time constant [sec]
% 7..8 : Two coefficients that describe the RPM to thrust [N] transfer function for static conditions [a1 a2]
% Thrust = a1 * RPM + a2 * RPM^2
% 9..10 : Two coefficients that describe the RPM to torque [Nm] transfer function for static conditions [b1 b2]
% Torque = b1 * RPM + b2 * RPM^2
% 11 : Minimum RPM value of the actuator
% 12 : Maximum RPM value of the actuator
% 13..15 : Rotations of thrust vector around Body-fixed axes away from nominal direction [deg]
% Nominal direction of thrust vector is [0;0;-1]
% Rotation order from body to motor axes is Yaw/Pitch/Roll (Euler angle sequence (1,2,3))
% 16 : Propeller diameter [m]
% 17 : Propeller mass [kg]
MotorMatrix_real = [045 , 0.170 , -0.028 , -1 , 1.0 , 0.010 , [9.6820 , 0.010872]*1e-5 , [1.4504 , 0.0016312]*1e-6 , 0000 , 6000 , [0.0 , 0.0 , 0.0] , 8*2.54/100 , 11/1000; ...
135 , 0.170 , -0.028 , +1 , 1.0 , 0.010 , [9.6820 , 0.010872]*1e-5 , [1.4504 , 0.0016312]*1e-6 , 0000 , 6000 , [0.0 , 0.0 , 0.0] , 8*2.54/100 , 11/1000; ...
225 , 0.170 , -0.028 , -1 , 1.0 , 0.010 , [9.6820 , 0.010872]*1e-5 , [1.4504 , 0.0016312]*1e-6 , 0000 , 6000 , [0.0 , 0.0 , 0.0] , 8*2.54/100 , 11/1000; ...
315 , 0.170 , -0.028 , +1 , 1.0 , 0.010 , [9.6820 , 0.010872]*1e-5 , [1.4504 , 0.0016312]*1e-6 , 0000 , 6000 , [0.0 , 0.0 , 0.0] , 8*2.54/100 , 11/1000];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Nominal airframe data (without disturbance/uncertainties)
CoG_nominal = [0;0;0.001]; % Location of center of gravity w.r.t. geometric center (in Body axes) [m]
mass_nominal = 0.550; % Complete airframe mass [kg]
Jxx = 0.003960; %
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] Vervoorst J W .A modular simulation environment for the improved dynamic simulation of multirotor unmanned aerial vehicles[J]. 2016.
🌈4 Matlab代码、Simulink实现
相关文章:
一种改进多旋翼无人机动态仿真的模块化仿真环境研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
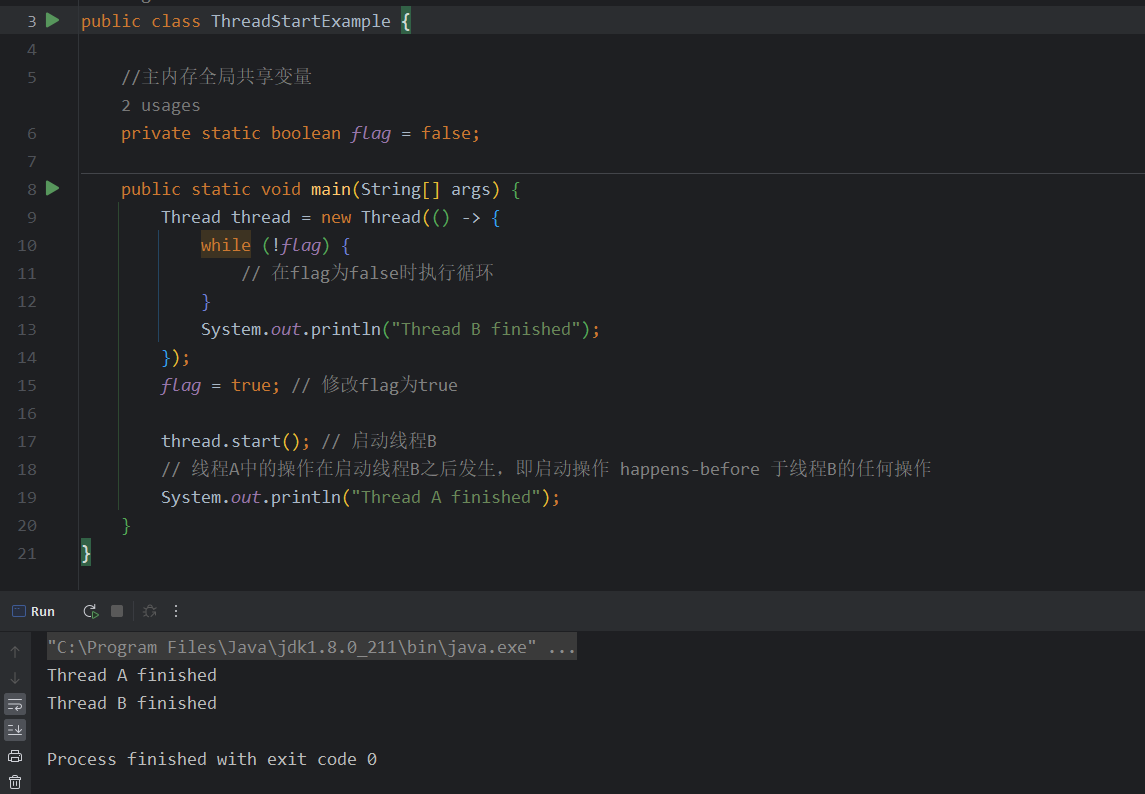
02-请解释一下Java的内存模型和happens-before规则?【Java面试题总结】
请解释一下Java的内存模型和happens-before规则? 概念:Java内存模型,简称JMM,是一种定义了多线程程序中内存访问行为的规范。它定义了线程如何与主内存和工作内存进行交互,以及如何保证多线程程序的正确性和可见性。J…...
)
PVE 8 出现CPU 100% 冻结(卡死)
最近在研究PVE,然后下载官方最新版本系统8.x安装好后出现卡死问题,就连开个软件CPU也能飙到100%,开始我以为是硬件问题可能是资源不够,但是将系统切换回裸机(不用PVE启动)一点问题也没有,后来逐…...

【高效编程技巧】编程菜鸟和编程大佬的差距究竟在哪里?
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《高效编程技巧》《C语言进阶》 ⛺️生活的理想,就是为了理想的生活! 文章目录 📋 前言1.如何写出好的代码?1.2 如何分析一个函数写的怎么样 2. 代码板式的重要性2.1 代码…...
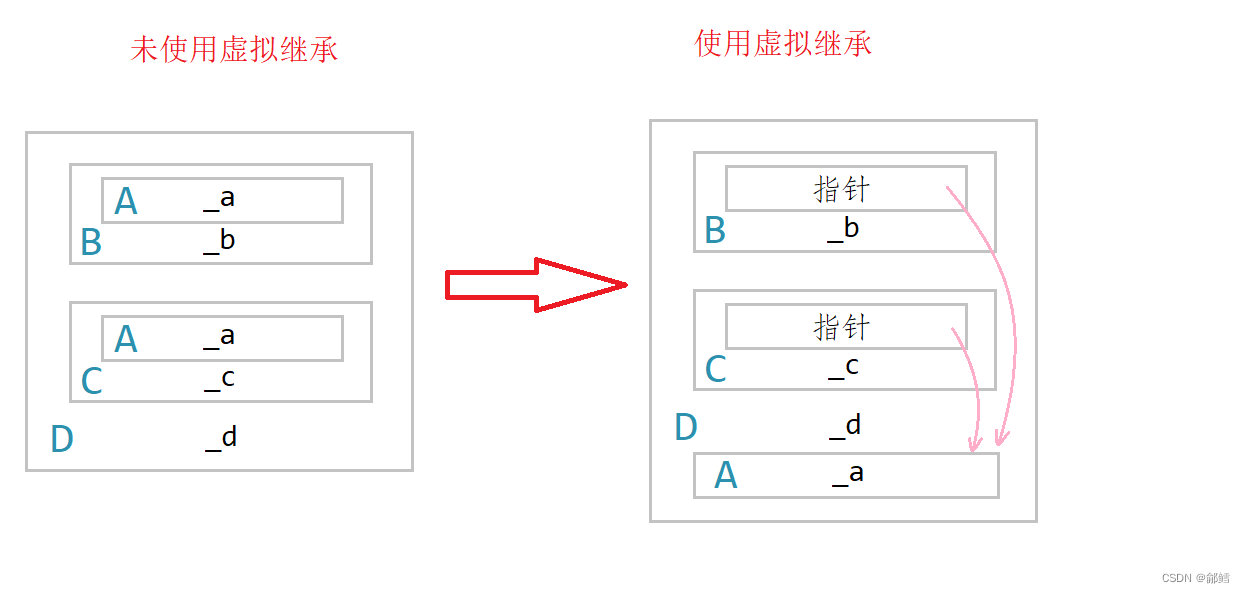
继承【C++】
文章目录 继承的概念继承的定义继承方式和访问限定符继承基类成员访问方式的变化 默认继承方式 基类和派生类对象赋值转换继承中的作用域派生类的默认成员函数继承与友元静态成员菱形继承及菱形虚拟继承继承的方式 菱形虚拟继承菱形虚拟继承原理 继承的概念 继承(inheritance)…...
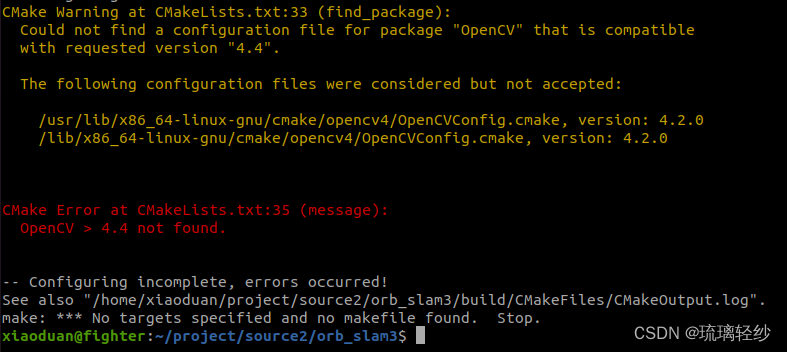
ORB-SLAM3复现过程中遇到的问题及解决办法
在复现过程中遇到的问题的解决过程 1. 版本检查1.1 Opencv版本的检测1.2 Eigen版本的检测1.3 查看Python版本1.4 其他 2. 编译过程中遇到的问题及解决办法2.1 ./build.sh遇到的问题2.2 ./build_ros.sh遇到的问题 因为环境比较干净,所以遇到的问题相对少一些…...

vue开发桌面exe应用
vue开发桌面exe应用 Electron-vue 参考 Electron-vue搭建vue全家桶Element UI客户端(一) 如何使用Vue.js构建桌面应用程序...

C# 实现PictureBox从随机选择的文件夹内对图像进行随机播放
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System...
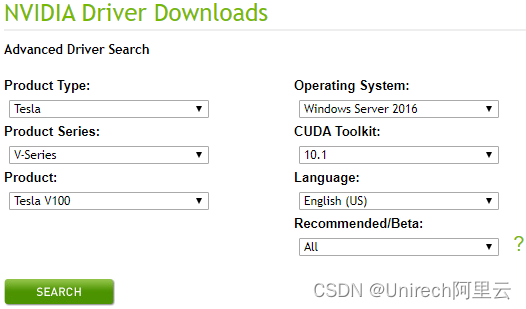
腾讯云国际代充-GPU服务器安装驱动教程NVIDIA Tesla
腾讯云国际站GPU 云服务器是基于 GPU 的快速、稳定、弹性的计算服务,主要应用于深度学习训练/推理、图形图像处理以及科学计算等场景。 GPU 云服务器提供和标准腾讯云国际 CVM 云服务器一致的方便快捷的管理方式。 GPU 云服务器通过其强大的快速处理海量数据的计算性…...
【python爬虫】9.带着小饼干登录(cookies)
文章目录 前言项目:发表博客评论post请求 cookies及其用法session及其用法存储cookies读取cookies复习 前言 第1-8关我们学习的是爬虫最为基础的知识,从第9关开始,我们正式打开爬虫的进阶之门,学习爬虫更多的精进知识。 在前面几…...

原神剑冢三层封印怎么解开 原神剑冢三层封印在哪里打
在原神游戏中原神探索剑冢封印并解开三层封印,玩家可以去蒙德城接取一个隐藏任务,这项任务需要玩家去解开剑冢三层封印,才能完成任务。然而,许多玩家可能还不知道如何解开这个封印,今天小编为大家整理了一份详细的攻略…...
)
Papers with Semi-supervised Learning for Medical Image Segmentation(SSL4MIS)
Papers_with_SSL4MIS CVPR2023 DateCategory标题TitleCodeBlog2023-06半监督医学图像分割用于半监督医学图像分割的伪标签引导对比学习Pseudo-Label Guided Contrastive Learning for Semi-Supervised Medical Image SegmentationLinkLink2023-06半监督图像分割SemiCVT&#…...

c#继承(new base)的使用
概述 C#中的继承是面向对象编程的重要概念之一,它允许一个类(称为子类或派生类)从另一个类(称为父类或基类)继承属性和行为。 继承的主要目的是实现代码重用和层次化的组织。子类可以继承父类的字段、属性、方法和事…...

【办公自动化】使用Python批量处理Excel文件并转为csv文件
🤵♂️ 个人主页:艾派森的个人主页 ✍🏻作者简介:Python学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞Ǵ…...
手机怎么剪视频?分享一些剪辑工具和注意事项
视频剪辑是一种将多个视频片段进行剪切、合并和编辑的技术,它可以帮助我们制作出精彩的视频作品。如今,随着智能手机的普及,我们可以随时随地使用手机进行视频剪辑。本文将为大家介绍一些手机剪辑工具和注意事项,帮助大家更好地进…...

面试题汇总
文章目录 一. 腾讯二. 华为三. 快手1. Long 的长度和范围,为什么要减 1 (Java基础)2. 线程池配置无界队列了之后,拒绝策略怎么搞,什么时候用到无界队列 (JUC并发) 四. 美团五. 阿里六. 百度七. 字节八. 大疆1. 为什么创建进程开销比线程大? …...

LLVM系列:1.设计思想和LLVM IR简介
文章目录 背景介绍内容简介LLVM库的集合以及模块化设计LLVM优化器的模块化设计LLVM代码生成器的模块化设计LLVM IRLLVM编译流程LLVM IR的设计思想LLVM的形式LLVM IR的结构组成指令格式和变量示例参考文献:背景介绍 LLVM项目于2000年创立于伊利诺斯州大学,原本是一个为了静态…...

mysql中间件Atlas
Mysql 的 proxy 中间件有比较多的工具,例如,mysql-proxy(官方提供), atlas , cobar, mycat, tddl, tinnydbrouter等等。 而Atlas是由 Qihoo 360公司Web平台部基础架构团队开发维护的一个基于MySQL协议的数据中间层项目。它在MySQL官方推出的MySQL-Pro…...
ChatGPT 实现动态地图可视化展示
地图可视化分析有许多优点和好处: 1.直观理解:地图可视化使得复杂的数据更易于理解。通过地图可视化,人们可以直观地看到地理位置、地区之间的关系以及空间分布的模式。 2.提高决策效率:地图可视化可以帮助决策者快速理解和解释数据,从而提高决策效率。 3.高效的数据整…...
Vue.js安装步骤和注意事项
安装完node.js后开始安装和部署Vue在检查webpack的下载版本时出现错误出现错误的原因是之前下载时未指定对应的版本号导致版本不兼容先卸载掉之前下载的版本 cnpm uninstall webpack-cli -g cnpm install webpack-cli4.9.2 -g 最后检查版本是否对应...

微信H5支付v3版Java实战:从零构建移动端支付解决方案
1. 微信H5支付的应用场景与优势 移动端支付已经成为现代商业不可或缺的一部分。微信H5支付作为微信支付生态中的重要一环,特别适合那些需要在非微信客户端浏览器中实现支付功能的场景。想象一下这样的画面:用户在手机浏览器中浏览你的电商网站ÿ…...

Qwen3.5-2B部署实操:CentOS 7兼容性处理与依赖库降级方案
Qwen3.5-2B部署实操:CentOS 7兼容性处理与依赖库降级方案 1. 模型简介 Qwen3.5-2B是阿里云推出的轻量化多模态基础模型,属于Qwen3.5系列的小参数版本(20亿参数)。该模型主打低功耗、低门槛部署特性,特别适配端侧和边…...

古基因组学:降解DNA的损伤模式、污染评估与群体历史推断
点击 “AladdinEdu,你的AI学习实践工作坊”,注册即送-H卡级别算力,沉浸式云原生集成开发环境,80G大显存多卡并行,按量弹性计费,教育用户更享超低价。 摘要:古基因组学通过对古代生物遗骸中高度降…...
)
别再踩坑了!Django Ckeditor配置全指南:从基础使用到高级定制(2023最新版)
Django Ckeditor实战手册:2023年高效配置与深度定制技巧 如果你正在为Django项目寻找一个功能强大且可定制的富文本编辑器,Ckeditor无疑是最佳选择之一。但配置过程中那些令人头疼的兼容性问题、图片上传失败、工具栏自定义困难,确实让不少开…...

用战神引擎开服后,别忘了这几步:服务器安全、日志监控与性能调优指南
战神引擎开服后的高阶运维指南:安全加固、日志监控与性能调优实战 当你成功用战神引擎架设传奇手游服务器后,真正的挑战才刚刚开始。服务器能跑起来只是第一步,如何让它跑得稳、跑得安全、跑得高效,才是区分普通服主和专业运维的关…...

AntdUI实战:用WinForm和.NET 6给老旧内部管理系统“换肤”的完整记录
AntdUI实战:用WinForm和.NET 6给老旧内部管理系统“换肤”的完整记录 当企业内部的WinForm系统运行超过十年,那些灰底蓝框的界面早已与现代审美格格不入。去年接手某制造业ERP系统改造时,我面对的是一个基于.NET Framework 4.0的"古董&q…...

万象视界灵坛效果展示:血条式置信度进度条与‘同步率’动态分布图实录
万象视界灵坛效果展示:血条式置信度进度条与同步率动态分布图实录 1. 平台概览 万象视界灵坛(Omni-Vision Sanctuary)是一款基于OpenAI CLIP技术的高级多模态智能感知平台。不同于传统视觉识别工具的单调界面,它将复杂的"语…...
)
别再为发票报销发愁!用Python+EasyOFD库,5分钟搞定OFD转PDF/图片(附完整代码)
5分钟极速解决发票报销难题:PythonEasyOFD高效转换实战指南 每次月底报销时,面对邮箱里堆积如山的OFD格式电子发票,你是否也感到头疼?手动一张张下载、转换、打印不仅耗时耗力,还容易出错。今天我们就来彻底解决这个困…...

ExpressionUtil实战指南:从基础解析到高级应用
1. ExpressionUtil工具类入门指南 第一次接触ExpressionUtil时,我正被项目中复杂的表达式计算需求困扰。这个工具类就像瑞士军刀一样,帮我解决了各种字符串表达式处理的难题。简单来说,ExpressionUtil是Java开发中处理数学表达式、逻辑判断的…...

嵌入式开发五大常见Bug解析与解决方案
1. 嵌入式开发中的五大常见Bug根源解析在嵌入式系统开发领域,代码质量直接关系到产品的可靠性和稳定性。作为一名经历过多个嵌入式项目的开发者,我深刻体会到某些类型的bug特别顽固且难以排查。这些bug往往在实验室测试中难以复现,却在现场运…...