FPGA实现电机转速PID控制
通过纯RTL实现电机转速PID控制,包括电机编码器值读取,电机速度、正反转控制,PID算法,卡尔曼滤波,最终实现对电机速度进行控制,使其能够渐近设定的编码器目标值。
一、设计思路
前面通过SOPC之NIOS Ⅱ实现电机转速PID控制(调用中断函数)对电机实现了PID控制,然后就可以按照其设计方式将上层的C语言实现的PID控制部分等全部转换成Verilog代码,最终实现纯RTL进行PID控制。
在前文中,电机PWM控制,电机方向和编码器值的获取,卡尔曼滤波是通过Verilog语言编写,而电机速度控制、PID控制是通过Nios Ⅱ系统中的软件部分实现的,因此需要编写电机速度模块,实现对电机PWM控制模块传入速度信息;编写PID控制模块,实现对电机速度模块速度的校正。
Nios Ⅱ中采用Avalon总线对各个底层Verilog代码进行读取和写入数据,因此也要对电机控制,电机方向和编码器值获取相关代码进行修改。
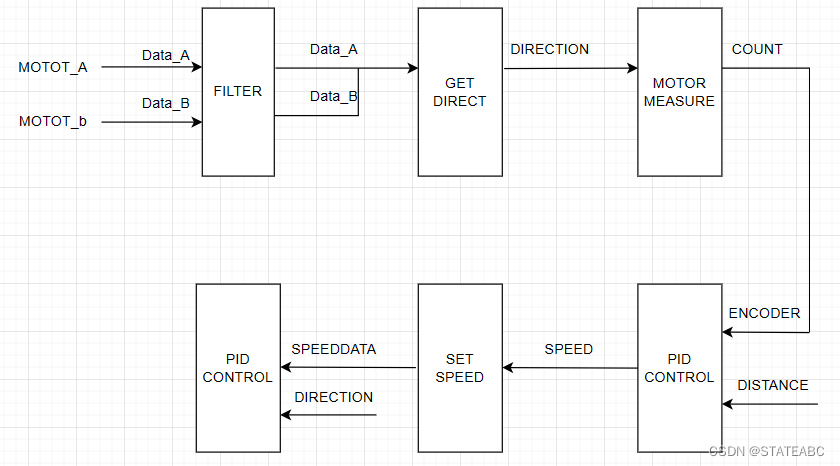
按照思路画出大概框图如下:
二、PWM控制模块
在前文PWM模块中由于需要Avalon总线的控制,因此有片选信号、片选地址、读写地址等变量,而转为纯RTL后只需要输入方向以及PWM值就可以,因此需要对前文代码进行修改
reg motor_movement; // 电机运动,1为开始、0为停止
reg motor_direction; // 电机转向,1为向前、0为向后
reg motor_fast_decay; // 电机减速,1为快制动、0为慢制动always @(posedge clock or negedge reset_n)
beginif (~reset_n)begin// PWMhigh_dur <= 0;total_dur <= 0;// MOTORmotor_movement <= 1'b0;motor_direction <= 1'b1;motor_fast_decay <= 1'b1;endelse if (en)begintotal_dur <= 32'd2500;high_dur <= speeddata;{motor_fast_decay, motor_direction, motor_movement} <= {1'b1,direction,1'b1};end// 方向控制
always @(*)
beginif (motor_fast_decay)begin if (motor_movement)beginif (motor_direction){DC_Motor_IN2, DC_Motor_IN1, PWM} <= {1'b1, 1'b0, PWM_OUT};else{DC_Motor_IN2, DC_Motor_IN1, PWM} <= {1'b0, 1'b1, PWM_OUT};endelse{DC_Motor_IN2, DC_Motor_IN1, PWM} <= {1'b1, 1'b1, 1'b0};end// PWM 转速控制
reg PWM_OUT;
reg [31:0] total_dur; // 总持续时间
reg [31:0] high_dur; // 高位时间,决定电机转速,控制 PWM 占空比,值越高,占空比越大,转速越快
reg [31:0] tick; // 计数器always @(posedge clock or negedge reset_n)
beginif (~reset_n)begintick <= 1;endelse if (tick >= total_dur)begintick <= 1;endelsetick <= tick + 1;
endalways @(posedge clock)
beginPWM_OUT <= (tick <= high_dur) ? 1'b1 : 1'b0;
end三、速度控制模块
速度控制模块的主要任务就是将PID模块传入的速度信息,转换为PWM值传入PWM控制模块,并根据速度的正负值计算电机的正转反转
//速度控制逻辑always @(posedge clk or negedge reset_n) beginif (~reset_n) beginSpeedParam <= 32'd0;direction_reg <= 0;end else begin//计算PWM参数 CYCLE_WIDTH_MINI = 32'd50;CYCLE_WIDTH_MAX = 32'd2500;if (Speed_in > 32'd0) beginSpeedParam <= CYCLE_WIDTH_MINI + (Speed_in * (CYCLE_WIDTH_MAX - CYCLE_WIDTH_MINI) / 32'd100);end else if(Speed_in < 32'd0) beginSpeedParam <= CYCLE_WIDTH_MINI + ((-Speed_in) * (CYCLE_WIDTH_MAX - CYCLE_WIDTH_MINI) / 32'd100);end else beginSpeedParam <= 32'd0;end//设置电机的转向direction_reg <= Speed_in[31] ? 0 : 1;endend四、PID控制模块
首先要将PID参数中的小数进行缩放转为定点数;
然后因为用了50MHz的时钟,时钟周期是10ns,可能导致KP、KI、KD算不完,因此将其进行分频为25MHz;
然后就是对 KP、KI、KD进行计算,输出PID结果,即电机速度;
最后为了防止电机速度和累积误差过大,对其进行限幅。
// 将Kp, Ki, Kd转化为定点数表示parameter KP = 32'd60; // 0.06parameter KI = 32'd1; // 0.001parameter KD = 32'd3400; // 3.4parameter SCALE_FACTOR = 1000; //缩放因子reg signed [31:0] error;reg signed [31:0] prev_error;reg signed [31:0] integral;reg signed [31:0] speed;reg signed [31:0] controlOutput;reg signed [31:0] p;reg signed [31:0] i;reg signed [31:0] d;wire signed [31:0] integral_next = integral + error;reg clk_25m; always @(posedge clk or negedge reset_n) beginif (~reset_n) beginclk_25m <= 0;end else beginclk_25m <= ~clk_25m;endendalways @(posedge clk_25m or negedge reset_n) beginif (~reset_n) beginerror <= 0;integral <= 0;speed <= 0;end else beginerror <= targetDistance - currentDistance;// Calculate control outputp <= error * KP;i <= integral * KI;d <= (error - prev_error) * KD;controlOutput <= (p + i + d) / SCALE_FACTOR;// 将控制输出限制在电机速度范围内//speed <= initialSpeed + controlOutput;if(controlOutput > $signed(32'd100)) beginspeed <= $signed(32'd100);end else if(controlOutput < $signed(-32'd100)) beginspeed <= $signed(-32'd100);end else beginspeed <= controlOutput;end//integral <= integrallimit + error;if(integral_next >= $signed(32'd800)) beginintegral <= $signed(32'd800);end else if(integral_next <= $signed(-32'd800)) beginintegral <= $signed(-32'd800);end else beginintegral <= integral_next;endendend// 更新下次迭代的前一次误差和积分always @(posedge clk_25m or negedge reset_n) beginif(~reset_n) beginprev_error <= 0;end else if(error!= prev_error) beginprev_error <= error;end else beginprev_error <= prev_error;endendassign speedout = speed;五、电机方向和编码器值的获取
电机编码器值要根据电机方向进行自增和自减,因此要先通过AB方波确认电机方向
reg DO_PULSE; //用于存储输出的电机脉冲信号
wire PULSE_XOR; //用于存储PHASE_A和PHASE_B进行异或结果
reg PULSE_XOR_PREVIOUS; //上一次的PULSE_XOR值
reg DIRECTION; //用于存储电机方向信号
reg DIRECT_PATCH; //用于存储DIRECT异或PHASE_A后取反的结果//解码方向信号
always @(posedge DI_PHASE_A) DIRECTION <= DI_PHASE_B; //当有DI_PHASE_A的上升沿,将DI_PHASE_B的值赋给DIRECTION
always @(posedge DI_PHASE_B) DIRECT_PATCH <= ~(DIRECTION ^ DI_PHASE_A); //当有DI_PHASE_B的上升沿,将DIRECT和DI_PHASE_A进行异或后取反赋值给DIRECT_PATCH
assign DO_DIRECT = DIRECTION | DIRECT_PATCH; //将DIRECTION和DIRECT_PATCH进行与运算 //解码脉冲信号
assign PULSE_XOR = DI_PHASE_A ^ DI_PHASE_B;
always @(posedge DI_SYSCLK)
beginif(PULSE_XOR != PULSE_XOR_PREVIOUS) begin DO_PULSE <= 1'b1; PULSE_XOR_PREVIOUS <= PULSE_XOR;endelse begin DO_PULSE <= 1'b0;endend获取电机方向后,对其进行计数,得到电机编码器的值并将其输出
always @(posedge clock or negedge reset_n)
beginif(~reset_n) begincounter_enable <= 0;endelse if (counter_enable) beginread_data <= pulse_counter;end
endalways @(posedge clock)
beginif(DO_PULSE ) beginif(motor_direction) begin //如果电机正转 if(pulse_counter < $signed(32'h8000))pulse_counter <= pulse_counter + 1; //counter随电机传回的脉冲数累加 endelse if(!motor_direction) begin //如果电机反转if(pulse_counter > $signed(-32'h8000))pulse_counter <= pulse_counter - 1; //counter随着电机传回的脉冲数递减 endelsepulse_counter <= 0; end
end 七、实验效果
整体的系统框图如下所示,左右两个电机的方波经过卡尔曼滤波后输入到motor_measure中,先获取其电机方向,然后对电机编码器进行计数并将左右两电机的编码器数值取平均值输入到PID控制模块中,与ISSP输入的目标编码器值进行计算出速度信息,将速度信息输入到set_speed中计算方向和PWM参数,输入到PWM控制模块进行电机控制

通过signal tap和ISSP联合抓波形,得出来的效果还是不错的,会有一点点超调量

相关文章:
FPGA实现电机转速PID控制
通过纯RTL实现电机转速PID控制,包括电机编码器值读取,电机速度、正反转控制,PID算法,卡尔曼滤波,最终实现对电机速度进行控制,使其能够渐近设定的编码器目标值。 一、设计思路 前面通过SOPC之NIOS Ⅱ实现电…...

C++中的volatile
volatile的本意是“易变的”,是一种类型修饰符,用它声明的类型变量表示可以被某些编译器未知的因素更改,比如操作系统、硬件或者其它线程等。遇到这个关键字声明的变量,编译器对访问该变量的代码就不再进行优化,从而可…...
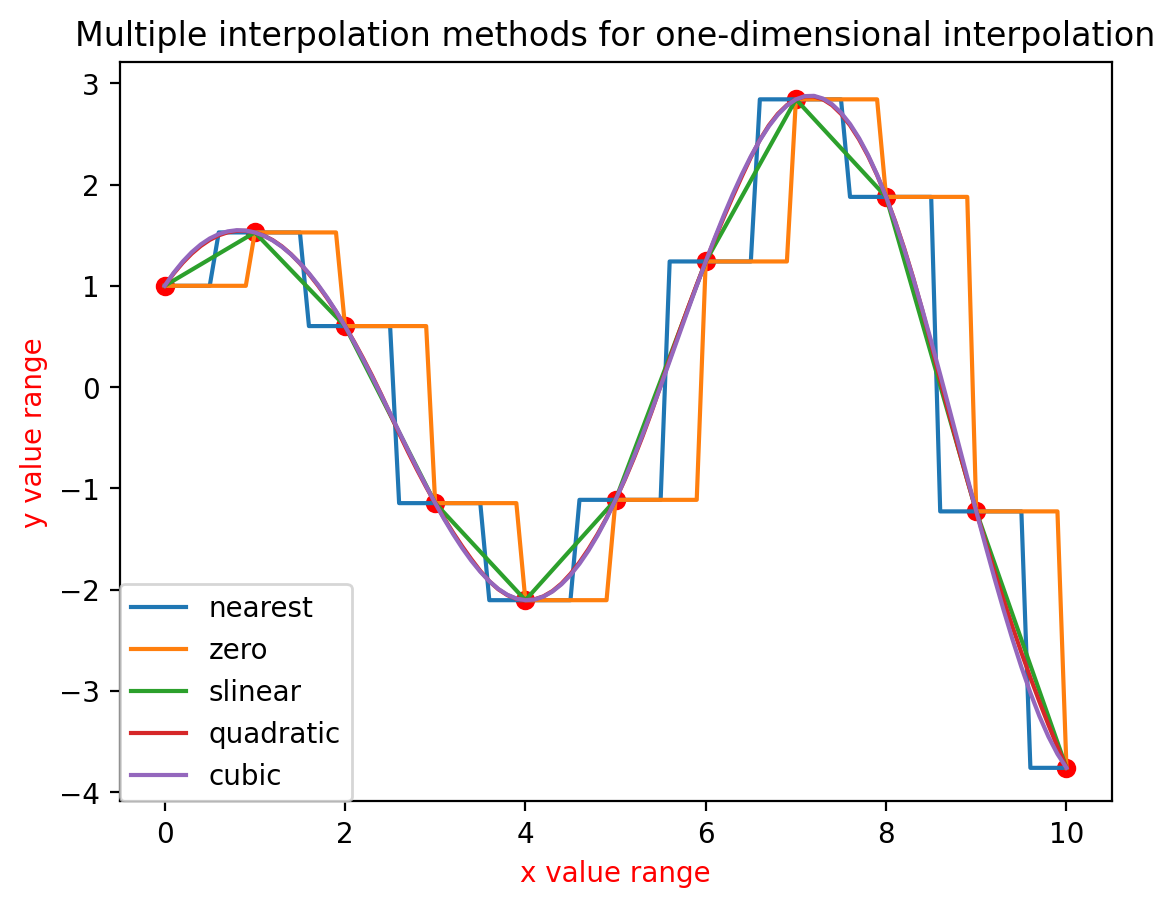
数学建模--一维插值法的多种插值方式的Python实现
目录 1.算法流程步骤 2.算法核心代码 3.算法效果展示 1.算法流程步骤 #算法的核心就是利用scipy中的interpolate来完成工作 #一共是5种一维插值算法形式: #插值方法:1.阶梯插值 2.线性插值 3.2阶样条插值 4.3阶样条插值 #"nearest"阶梯插值 #"zero&…...

爱校对:让法律、医疗、教育行业的文本更加无懈可击
在今天这个信息爆炸的世界里,文本准确性成了法律、医疗和教育这些严谨行业中一个不能忽视的要点。一个小错误可能造成严重的后果,甚至影响人们的生命和事业。这正是为什么更多的专业人士开始选择使用“爱校对”来确保他们的文档、研究和通讯无懈可击。 法…...
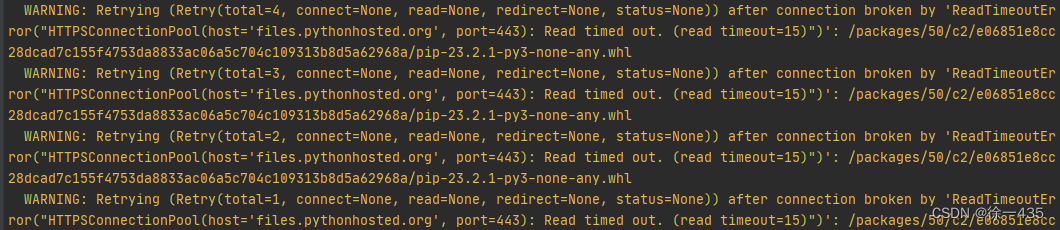
使用pip下载第三方软件包报错超时处理方法
报错如下: WARNING: Retrying (Retry(total4, connectNone, readNone, redirectNone, statusNone)) after connection broken by ‘ReadTimeoutEr ror(“HTTPSConnectionPool(host‘files.pythonhosted.org’, port443): Read timed out. (read timeout15)”)’: /p…...

计算古坐标——基于GPlates Web Service的坐标点重建
Gplates客户端和在线门户,pygplates和gplately是存在内在联系的应用,它们主要实现可视化,输入板块模型和化石点的现今坐标信息,在GPlates中可视化呈现,点位的坐标计算并不展现。而rgplates利用R语言提供了直接进行坐标…...

智安网络|加强软件供应链安全保障:共同抵御威胁的关键路径
在当今数字化时代,软件供应链安全成为了一个备受关注的话题。各行各业都依赖于软件产品和服务来支持其业务运营。然而,随着供应链的不断扩大和复杂化,软件供应链安全问题也日益突出。那么应该如何解决? 首先,软件供应…...
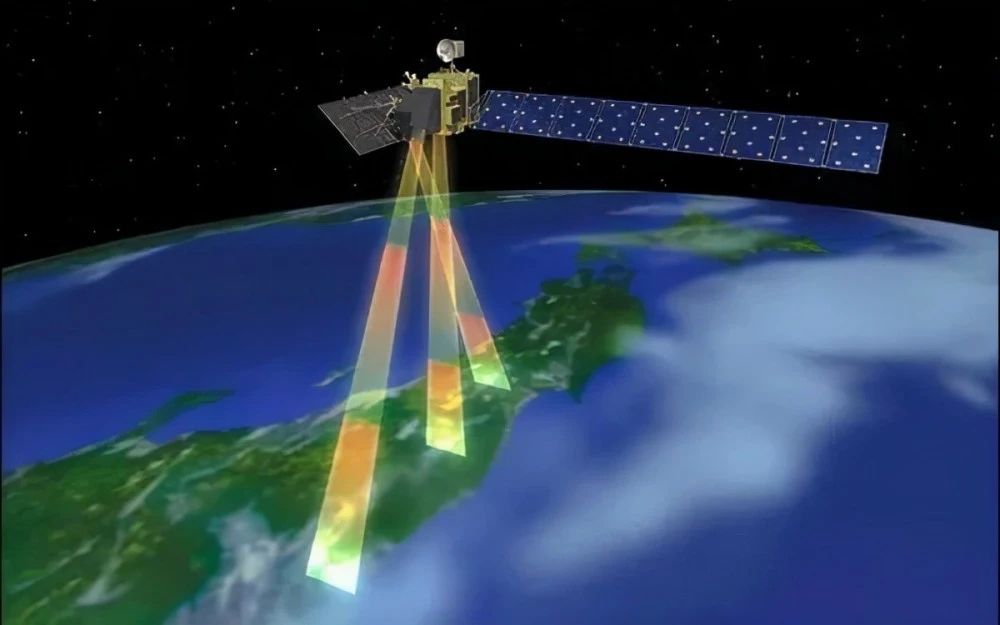
华为Mate 60系列发售,北斗卫星通信技术进一步深入大众消费市场
近日,华为Mate 60系列手机在没有举办发布会的情况下在官方商城突然上架开售,人气火爆。 值得一提的是,华为Mate60 Pro支持卫星通话,无地面网络时,也能拨打和接听卫星电话,还可自由编辑卫星消息。华为 Mate6…...

Grad-CAM,即梯度加权类激活映射 (Gradient-weighted Class Activation Mapping)
Grad-CAM,即梯度加权类激活映射 (Gradient-weighted Class Activation Mapping),是一种用于解释卷积神经网络决策的方法。它通过可视化模型对于给定输入的关注区域来提供洞察。 原理: Grad-CAM的关键思想是将输出类别的梯度(相对于特定卷积…...

程序发布——使用pyinstaller打包识别程序为exe可执行文件 详解
当我们使用python完成项目开发后,必然面对着如何将自己的程序分享给其他人使用,这就离不开程序的打包工作。对于大多数人而言,我们还是使用windows电脑居多,因此我们在大多数场景是需要将程序打包为exe的可执行文件。笔者将在本章节详细介绍使用pyinstaller进行打包的全过程…...

Docker 使用
简介 Docker是一个开源的容器引擎,它有助于更快地交付应用。 Docker可将应用程序和基础设施层隔离,并且能将基础设施当作程序一样进行管理。使用 Docker可更快地打包、测试以及部署应用程序,并可以缩短从编写到部署运行代码的周期。 Docker…...
电脑c盘变红满了怎么清理?4个方法轻松清理!
“我的电脑才用了不到一年,现在就已经满了!电脑c盘变红满了应该怎么清理呢?有什么方法能帮我清理的干净一点吗?希望大家给我出出主意。” 随着我们使用电脑时间的增多,电脑C盘可能会变得满满当当,这会不仅会…...
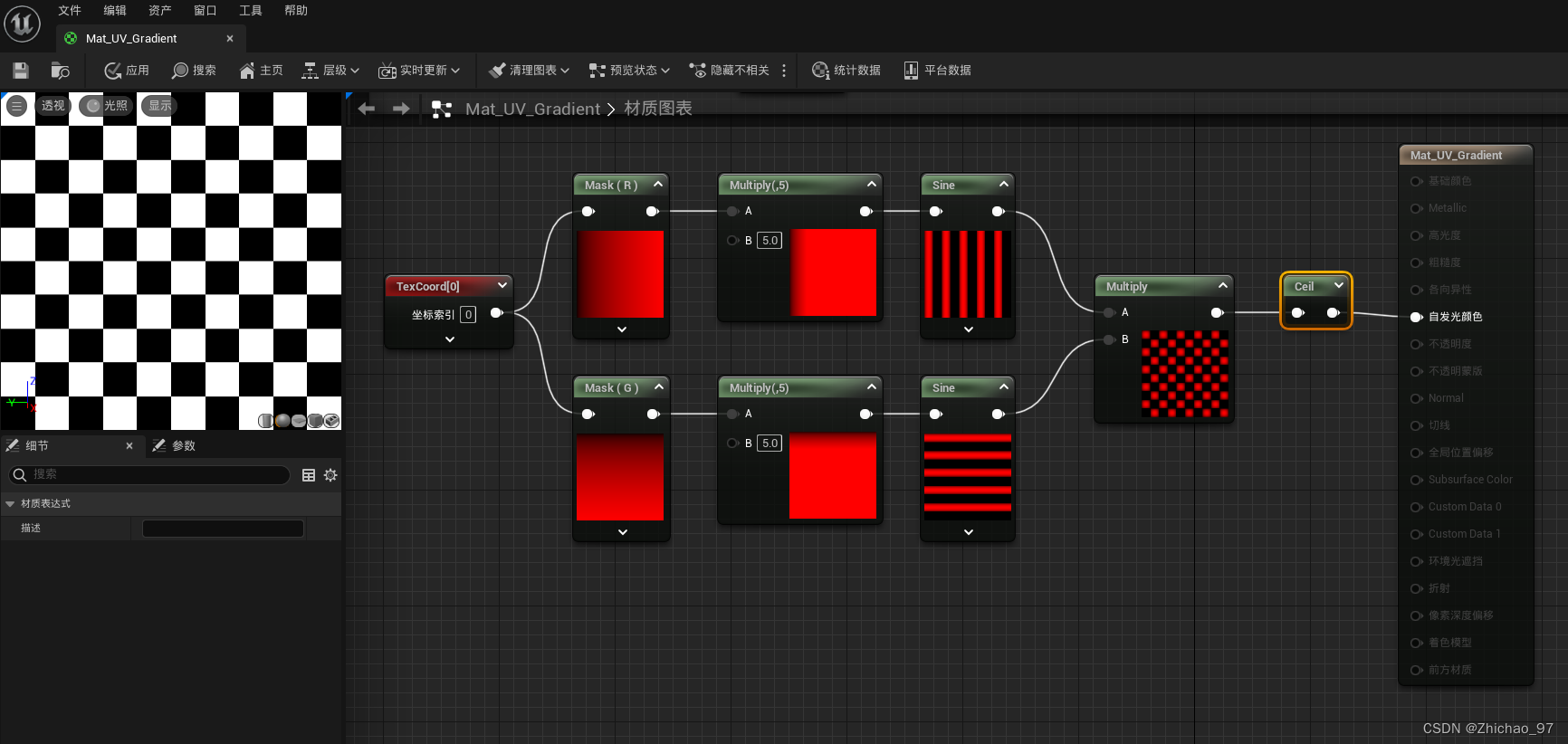
【UE 材质】实现角度渐变材质、棋盘纹理材质
目标 步骤 一、角度渐变材质 1. 首先通过“Mask”节点将"Texture Coordinate" 节点的R、G通道分离 2. 通过“RemapValueRange”节点将0~1范围映射到-1~1 可以看到此时R通道效果: G通道效果: 继续补充如下节点 二、棋盘纹理材质 原视频链接&…...
[深度学习]1. 深度学习知识点汇总
本文记录了我在学习深度学习的过程中遇到过的不懂的知识点,为了方便翻阅,故将其发表于此,随时更新,供大家参考。 深度学习常见知识点 1. 测试精度和训练精度 在深度学习中,测试精度和训练精度是两个重要的指标&#…...
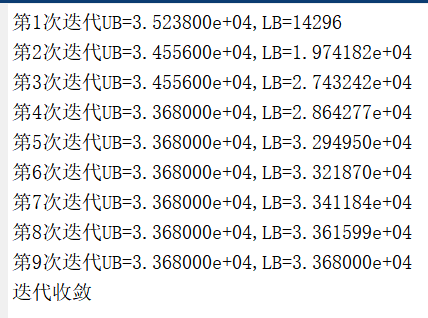
鲁棒优化入门(6)—Matlab+Yalmip两阶段鲁棒优化通用编程指南(上)
0.引言 上一篇博客介绍了使用Yalmip工具箱求解单阶段鲁棒优化的方法。这篇文章将和大家一起继续研究如何使用Yalmip工具箱求解两阶段鲁棒优化(默认看到这篇博客时已经有一定的基础了,如果没有可以看看我专栏里的其他文章)。关于两阶段鲁棒优化与列与约束生成算法的原…...

golang通过gorm操作sqlite设置主键自增
在 Golang 中使用 GORM 操作 SQLite 数据库时,可以通过以下步骤设置主键自增: 首先,确保已经安装了 GORM 和 SQLite 的驱动程序。你可以使用以下命令安装它们: go get -u gorm.io/gorm go get -u gorm.io/driver/sqlite导入所…...

基于Spring Boot的企业门户网站设计与实现(Java+spring boot+MySQL)
获取源码或者论文请私信博主 演示视频: 基于Spring Boot的企业门户网站设计与实现(Javaspring bootMySQL) 使用技术: 前端:html css javascript jQuery ajax thymeleaf 微信小程序 后端:Java springboot…...

Json解析流程
一、拿到了题库 分析一下可以定义的 1、序号,用来区分题目数,每个题有唯一的序号 2、题目,就是下图的Q 3、预设的回答,下图的A 分析完我可以知道有三个字段,分别是int index、string Q、string A。 二、把字段丢到…...

Mybatis 动态SQL – 使用choose标签动态生成条件语句
之前我们介绍了if,where标签的使用;本篇我们需要在if,where标签的基础上介绍如何使用Mybatis提供的choose标签动态生成条件语句。 如果您对if,where标签动态生成条件语句不太了解,建议您先进行了解后再阅读本篇,可以参考: Mybat…...

http接口自动化测试框架实现
目录 一、测试需求描述 二、实现方法 三、Excel表格样式 四、实现代码(代码才是王道,有注释很容易就能看明白的) 一、测试需求描述 对服务后台一系列的http接口功能测试。 输入:根据接口描述构造不同的参数输入值 输出&…...

硬件工程师转型软件设计:十大核心技巧与思维转换实战指南
1. 项目概述:一次思维模式的“跨界”升级作为一名在硬件领域摸爬滚打了十多年的老兵,我深知从示波器、烙铁和PCB布线软件转向代码编辑器、版本控制和软件架构图时,那种既兴奋又迷茫的感觉。硬件工程师转软件设计,这绝不仅仅是换个…...

告别iTunes!在Ubuntu 22.04上使用libimobiledevice管理你的iPhone文件
告别iTunes!在Ubuntu 22.04上使用libimobiledevice管理你的iPhone文件 当Linux用户第一次将iPhone连接到Ubuntu系统时,往往会遇到一个尴尬的现实——系统无法识别这个世界上最流行的移动设备。不同于Windows和macOS,Linux默认缺乏对iOS设备的…...

ARM Cortex-M微控制器与瑞萨RA系列开发实战指南
1. 项目概述:从“ARM”到“瑞萨RA”的认知之旅在嵌入式开发的江湖里,如果你还在纠结于8位、16位单片机的选型,或者对“ARM Cortex-M”这个名词感到既熟悉又陌生,那么这篇文章就是为你准备的。我接触过不少从传统8051、AVR转型过来…...
)
电路分析基础(2)
受控源 基本概念 理想受控源模型...

御坂翻译器:3分钟开启你的日语游戏无障碍之旅
御坂翻译器:3分钟开启你的日语游戏无障碍之旅 【免费下载链接】MisakaTranslator 御坂翻译器—Galgame/文字游戏/漫画多语种实时机翻工具 项目地址: https://gitcode.com/gh_mirrors/mi/MisakaTranslator 你是否曾经因为语言障碍而错过了那些精彩的日系游戏剧…...

避坑指南:Vivado增量综合的‘甜蜜区’与‘雷区’——从日志文件看何时该用、何时该弃
Vivado增量综合实战决策手册:如何精准识别高效区间与风险边界 在FPGA开发领域,时间就是竞争力。当项目进入迭代优化阶段,每次按下综合按钮后的等待时间,都可能成为团队效率的隐形杀手。Vivado的增量综合功能就像一把双刃剑——用对…...

SQLI-labs 第十七关:POST二次注入与报错注入实战解析
1. 二次注入与报错注入的核心原理 二次注入就像是一个潜伏的特工,它不会在第一次接触时就暴露自己。想象这样一个场景:你在网站注册时输入了一个恶意用户名,系统当时没有表现出任何异常。但当你后续修改密码时,这个潜伏的恶意代码…...
)
【VScode】STM32CubeMX+VScode开发编译下载STM32程序(基于Cmake工程)
【VScode】STM32CubeMXVScode开发STM32程序(基于Cmake工程) 文章目录准备工作安装上述软件(略)为VScode配置隔离开发环境-cubeMX为新环境安装插件1. 安装STM32CubelIDE for Visual Studiio Code插件2. 安装Cortex-Debug插件3. 安装…...

两阶段目标检测器核心原理与流程详解
两阶段目标检测器的核心思想是:第一阶段先找候选区域,第二阶段再对候选区域做分类和精修。典型代表是: R-CNN Fast R-CNN Faster R-CNN Mask R-CNN现在最典型的是 Faster R-CNN / Mask R-CNN,所以我以它为主来讲。1. 两阶段目标检…...

开源阅读鸿蒙版:打造您的个性化无广告数字图书馆
开源阅读鸿蒙版:打造您的个性化无广告数字图书馆 【免费下载链接】legado-Harmony 开源阅读鸿蒙版仓库 项目地址: https://gitcode.com/gh_mirrors/le/legado-Harmony legado-Harmony是一款专为鸿蒙系统设计的开源电子书阅读器,它为您提供纯净的阅…...