STM32 CAN快速配置(HAL库版本)
STM32 CAN快速配置(HAL库版本)
目录
- STM32 CAN快速配置(HAL库版本)
- 前言
- 1 软件编程
- 1.1 初始化
- 1.1.1 引脚设置
- 1.1.2 CAN参数设置
- 1.1.3 CAN滤波器设置
- 1.2 CAN发送
- 1.3 CAN接收
- 2 运行测试
- 结束语
前言
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。
特别说明:关于CAN总线协议和硬件电路等问题,这里不做介绍,网上的资料非常多,不懂的同学请自行查阅。
1 软件编程
1.1 初始化
初始化主要分成三部分:引脚设置,CAN参数设置和CAN滤波器设置。
1.1.1 引脚设置
把CAN_H和CAN_L两个引脚配置成复用功能即可。
注:如果CAN控制芯片的S引脚连接到STM32的话,还得初始化这个引脚,S引脚可以配置成高速模式或静音模式。
参考代码:
注:该代码可以通过STM32CubeMX生成
/**
* @brief CAN MSP Initialization
* This function configures the hardware resources used in this example
* @param hcan: CAN handle pointer
* @retval None
*/
void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(hcan->Instance==CAN1){/* USER CODE END CAN1_MspInit 0 *//* Peripheral clock enable */HAL_RCC_CAN1_CLK_ENABLED++;if(HAL_RCC_CAN1_CLK_ENABLED==1){__HAL_RCC_CAN1_CLK_ENABLE();}__HAL_RCC_GPIOA_CLK_ENABLE();/**CAN1 GPIO ConfigurationPA11 ------> CAN1_RXPA12 ------> CAN1_TX*/GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* CAN1 interrupt Init */HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0); // CAN接收中断HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);}
}
1.1.2 CAN参数设置
HAL库的CAN初始化有几个重要参数,都存放在几个结构体里面(如:CAN_HandleTypeDef,CAN_InitTypeDef),具体的结构体定义可以在HAL库查看。
说明:CAN参数需要根据自己实际的需求来配。
我这里着重讲解一下CAN波特率的配置。
CAN波特率 = CAN时钟频率 / 分频系数 / (TimeSeg1 + TimeSeg2 + 1)。
其中,CAN时钟频率不是固定不变的,它取决于CAN所挂载的总线时钟。
比如STM32F1,系统时钟最大72M,APB1的总线时钟最大36M,而CAN控制器的时钟是挂在APB1的,所以CAN的时钟频率也等于APB1的时钟。
如果换作其他型号的MCU,CAN外设不一定是挂载到APB1上面的,时钟也不一定是36M,比如F4系列,APB1的时钟是可以配成42M的,因此,这个要根据实际情况来配置。
参考代码:
注:该代码可以通过STM32CubeMX生成
/*** @brief CAN1 Initialization Function* @param None* @retval None*/
static void MX_CAN_Init(void)
{// CAN波特率 = CAN时钟频率 / Prescaler / (TimeSeg1 + TimeSeg2 + 1)// 例: 500kbps = 36MHz / 9 / (3 + 4 + 1) 36MHz为该例程APB1的总线时钟/* USER CODE END CAN1_Init 1 */hcan.Instance = CAN1; // 配置CAN1hcan.Init.Prescaler = 9; // 预分频系数hcan.Init.Mode = CAN_MODE_NORMAL; // 正常CAN模式 hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; // 重同步跳跃宽度,CAN_SJW_1TQ~CAN_SJW_4TQ hcan.Init.TimeSeg1 = CAN_BS1_3TQ; // TimeSeg1 hcan.Init.TimeSeg2 = CAN_BS2_4TQ; // TimeSeg2 hcan.Init.TimeTriggeredMode = DISABLE; // 非时间触发通信模式 hcan.Init.AutoBusOff = DISABLE; // 软件自动离线管理 hcan.Init.AutoWakeUp = DISABLE; // 睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位) hcan.Init.AutoRetransmission = DISABLE; // 禁止报文自动重传 hcan.Init.ReceiveFifoLocked = DISABLE; // FIFO报文不锁定,新的覆盖旧的 hcan.Init.TransmitFifoPriority = DISABLE; // 优先级由报文标识符决定 if (HAL_CAN_Init(&hcan) != HAL_OK){Error_Handler();}
}
1.1.3 CAN滤波器设置
CAN滤波器的主要作用是筛选CAN接收的数据,只有满足设定规则的数据才会被接收,否则会被过滤掉。
参考代码:
void CAN_Config(void)
{CAN_FilterTypeDef sFilterConfig;/* Configure the CAN Filter */sFilterConfig.FilterBank = 0; // 过滤器编号,使用一个CAN,则可选0-13;使用两个CAN可选0-27sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; // 过滤器模式,掩码模式或列表模式sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; // 过滤器位宽sFilterConfig.FilterIdHigh = 0x0000; // 过滤器验证码ID高16位,0-0xFFFFsFilterConfig.FilterIdLow = 0x0000; // 过滤器验证码ID低16位,0-0xFFFFsFilterConfig.FilterMaskIdHigh = 0x0000; // 过滤器掩码ID高16位,0-0xFFFFsFilterConfig.FilterMaskIdLow = 0x0000; // 过滤器掩码ID低16位,0-0xFFFFsFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; // FIFOx,0或1sFilterConfig.FilterActivation = ENABLE; // 使能过滤器sFilterConfig.SlaveStartFilterBank = 14; // 从过滤器编号,0-27,对于单CAN实例该参数没有意义if (HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK){/* Filter configuration Error */}/* Start the CAN peripheral */if (HAL_CAN_Start(&hcan) != HAL_OK){/* Start Error */}/* Activate CAN RX notification */if (HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK){/* Notification Error */}
}
1.2 CAN发送
CAN发送需要先配置发送参数,我这里为了方便测试,直接固定发送标准帧,ID也是固定的。
实际使用时可以再增加一个ID的入参,这样会更灵活一点。
参考代码:
/****************************************************************************
* 名 称: uint8_t CAN_Send_Msg(uint8_t* msg, uint8_t len)
* 功 能:can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)
* 入口参数:len:数据长度(最大为8) msg:数据指针,最大为8个字节.
* 返回参数:0,成功;其他,失败;
* 说 明:
****************************************************************************/
uint8_t CAN_Send_Msg(uint8_t* msg, uint8_t len)
{ uint8_t i=0;uint8_t message[8];uint32_t TxMailbox;CAN_TxHeaderTypeDef CAN_TxHeader;// 设置发送参数CAN_TxHeader.StdId = 0x12; // 标准标识符(12bit)CAN_TxHeader.ExtId = 0x12; // 扩展标识符(29bit)CAN_TxHeader.IDE = CAN_ID_STD; // 使用标准帧CAN_TxHeader.RTR = CAN_RTR_DATA; // 数据帧CAN_TxHeader.DLC = len; // 发送长度 CAN_TxHeader.TransmitGlobalTime = DISABLE;// 装载数据for(i = 0; i < len; i++){message[i] = msg[i];}// 发送CAN消息if(HAL_CAN_AddTxMessage(&hcan, &CAN_TxHeader, message, &TxMailbox) != HAL_OK) {return 1;}while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) != 3) {}return 0;
}
1.3 CAN接收
接收部分只要开启了Rx中断,在CAN控制器收到消息时会调用RxFifo的回调函数,此时我们在这里读取数据并根据实际情况做相应的处理即可。
参考代码:
/*******************************************************************************
* Function Name : HAL_CAN_RxFifo0MsgPendingCallback
* Description : 消息接收回调函数
* Input : hcan
* Output : None
* Return : None
****************************************************************************** */
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{// 收到CAN数据会触发接收中断,进入该回调函数uint32_t i;uint8_t RxData[8];CAN_RxHeaderTypeDef CAN_RxHeader; if(HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &CAN_RxHeader, RxData) == HAL_OK){// 串口打印接收结果printf("GetRxMessage, CANID:0x%0X, Data:", CAN_RxHeader.StdId);for(i = 0;i < CAN_RxHeader.DLC; i++){printf("%02x ", RxData[i]);}// 把接收的数据用CAN再发回去CAN_Send_Msg(RxData, CAN_RxHeader.DLC);}
}
2 运行测试
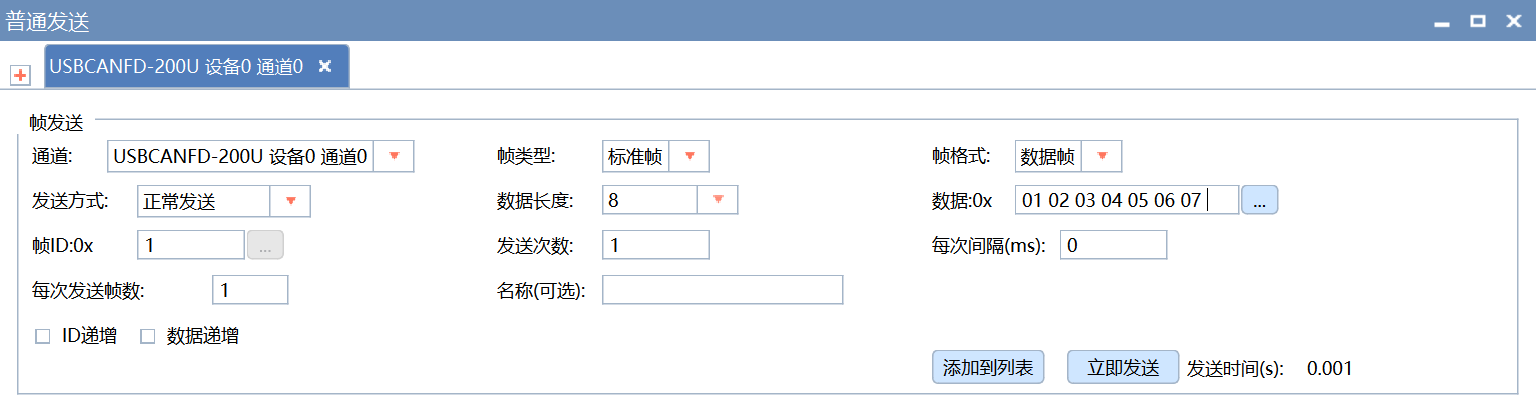
使用USB-CAN工具测试发送:
消息窗口如下:

可以看到,上位机发送了一条CAN数据,CANID为0x01,接着就收到了STM32回的一条数据,CANID为0x12(因为我代码固定写死了ID为0x12)。
同样的,通过串口也能看到STM32收到的CAN数据,如下图所示:

还有一些其他测试,比如收发不同长度,切换扩展帧等等,这里就不展示了,感兴趣的同学可以自己改参数试试。
结论:CAN收发正常。
结束语
好了,关于如何通过STM32如何配置和使用CAN就讲到这里,如果你有什么问题或者有更好的方法,欢迎在评论区留言。
相关文章:
STM32 CAN快速配置(HAL库版本)
STM32 CAN快速配置(HAL库版本) 目录 STM32 CAN快速配置(HAL库版本)前言1 软件编程1.1 初始化1.1.1 引脚设置1.1.2 CAN参数设置1.1.3 CAN滤波器设置 1.2 CAN发送1.3 CAN接收 2 运行测试结束语 前言 控制器局域网总线(CA…...
【文末送书】全栈开发流程——后端连接数据源(二)
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站 「推荐专栏」: ★java一站式服务 ★ ★ React从入门到精通★ ★前端炫酷代码分享 ★ ★ 从0到英雄,vue成神之路★ ★ uniapp-从构建到提升★ ★ 从0到英雄ÿ…...

leetcode_27_最小栈
class MinStack { public:MinStack() {}void push(int val) {//只要是压栈,先将元素保存到_elem中_elem.push(val);//如果x小于_min中栈顶的元素,将x再压入_min中if(_min.empty() || val < _min.top()){_min.push(val);}}void pop() {//如果——min栈…...

01-ZooKeeper快速入门
1 Zookeeper概念 Zookeeper是Apache Hadoop项目下的一个子项目,是一个树形目录服务。 zookeeper翻译过来就是 动物园管理员,它是用来管理Hadoop(大象)、Hive(蜜蜂)、Pig(小猪)的管…...
[经典面试题]JS的typeof和instanceof区别
一、typeof typeof 是一个一元操作符不是函数,所以不需要传递参数,使用方法非常简单:typeof A 对于基本类型 let s "Nicholas"; let b true; let i 22; let u; let sb undefined; console.log(typeof s); // string console.…...
C++内存区堆和栈
在C中,内存分成5个区,堆、栈、自由存储区、全局/静态存储区和常量存储区。 栈,就是那些由编译器在需要的时候分配,在不需要的时候自动清除的变量的存储区。里面的变量通常是局部变量、函数参数等。 堆,就是那些…...
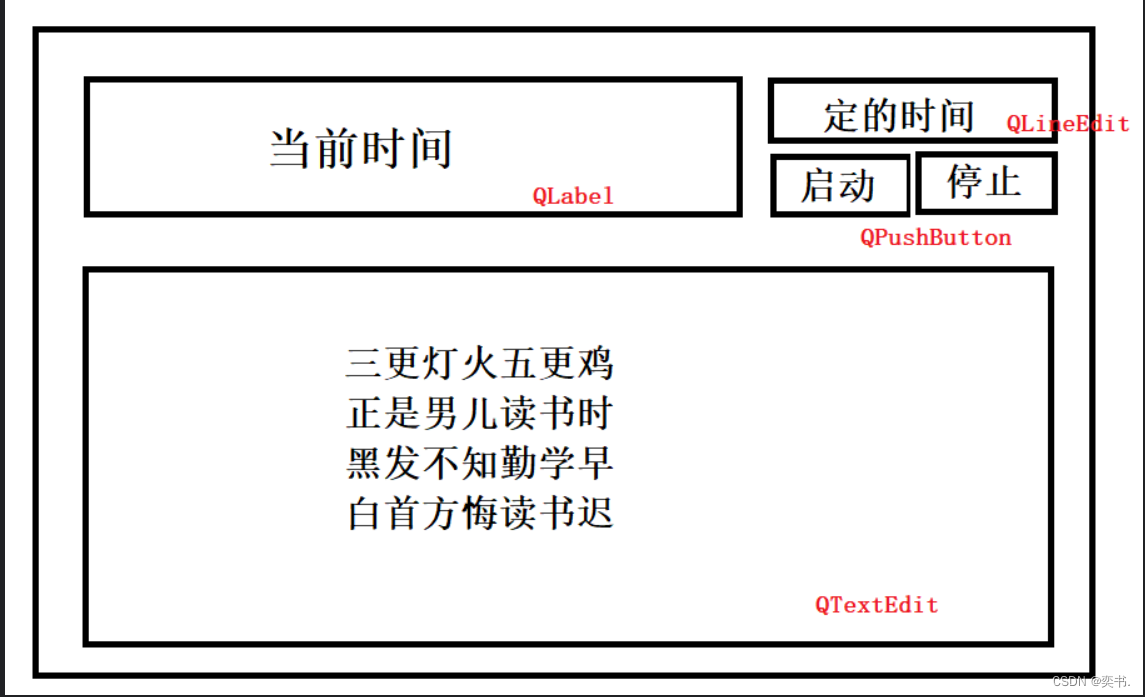
QT中闹钟的设置
.h文件 #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QPushButton> //按钮 #include <QTextEdit> //文本 #include <QLabel> //标签 #include <QLineEdit> //行编辑器#include <QTimerEvent> //定时器事件类头文件 #…...
)
【Redis】几款redis可视化工具(推荐Another Redis Desktop Manager)
Redis是一个超精简的基于内存的键值对数据库(key-value),一般对并发有一定要求的应用都用其储存session,乃至整个数据库。不过它公自带一个最小化的命令行式的数据库管理工具,有时侯使用起来并不方便。不过Github上面已经有了很多图形化的管理…...
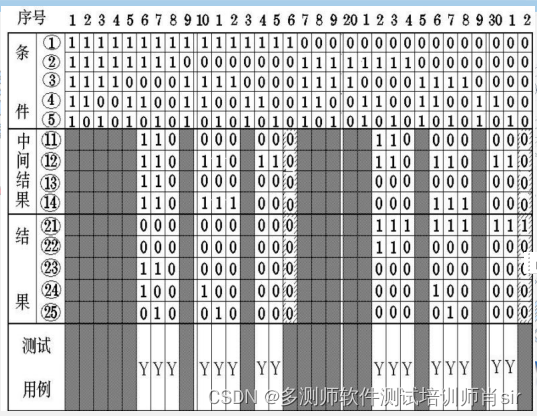
肖sir__设计测试用例方法之因果图07_(黑盒测试)
设计测试用例方法之因果图 一、定义:因果图提供了一个把规格转化为判定表的系统化方法,从该图中可以产生测试数据。其 中,原因是表示输入条件,结果是对输入执 行的一系列计算后得到的输出。 二、因果图方法最终生成的就是判定表。…...
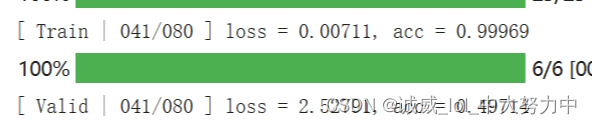
李宏毅-21-hw3:对11种食物进行分类-CNN
一、代码慢慢阅读理解总结内化: 1.关于torch.nn.covd2d()的参数含义、具体用法、功能: (1)参数含义: 注意,里面的“padding”参数:《both》side所以是上下左右《四》边都会加一个padding数量…...

成集云 | 飞书审批同步金蝶云星空销售订单 | 解决方案
源系统成集云目标系统 方案介绍 飞书是字节跳动于2016年自研的新一代一站式协作平台,将即时沟通、日历、云文档、云盘和工作台深度整合,通过开放兼容的平台,让成员在一处即可实现高效的沟通和流畅的协作,全方位提升企业效率。 …...

06 科技英语|控制与优化学科词汇
maneuver n 策略;v 操控、调遣 manipulate vt 熟练控制 scalability n 可扩展性 leverage n 杠杆;v 促使...改变 flexibility n 弹性 dispatch n 急件;v 调度;派遣 leverage …...

【网络教程】GitHub搜索技巧大揭秘
文章目录 1. 使用关键词优化搜索2. 结合布尔运算符3. 利用星号扩展搜索4. 高级搜索语法5. 按照星标数量搜索6. 使用文件类型搜索7. 在特定分支上搜索8. 使用文件名搜索9. 搜索贡献者10. 使用标签筛选仓库在开发过程中,我们经常需要在GitHub上查找代码、库或相关文档。本文将介…...
文件解析)
AUTOSAR LIN: LDF(LIN Description File)文件解析
LDF文件示例 LIN_description_file "lin_example.ldf" { LIN_protocol_version "2.0";LIN_language_version "2.0";nodes {master: MasterNode;slaves: SlaveNode1, SlaveNode2;};signals {Signal1: MasterNode, SlaveNode1;Signal2: Maste…...
Vue.js 报错:Cannot read property ‘validate‘ of undefined“
错误解决 起因,是我将elemnt-ui登录,默认放在mounted()函数里面,导致vue初始化就调用这个函数。 找了网上,有以下错误原因: 1.一个是你ref写错了,导致获取不了这个表单dom,我这显然不是。 2.…...
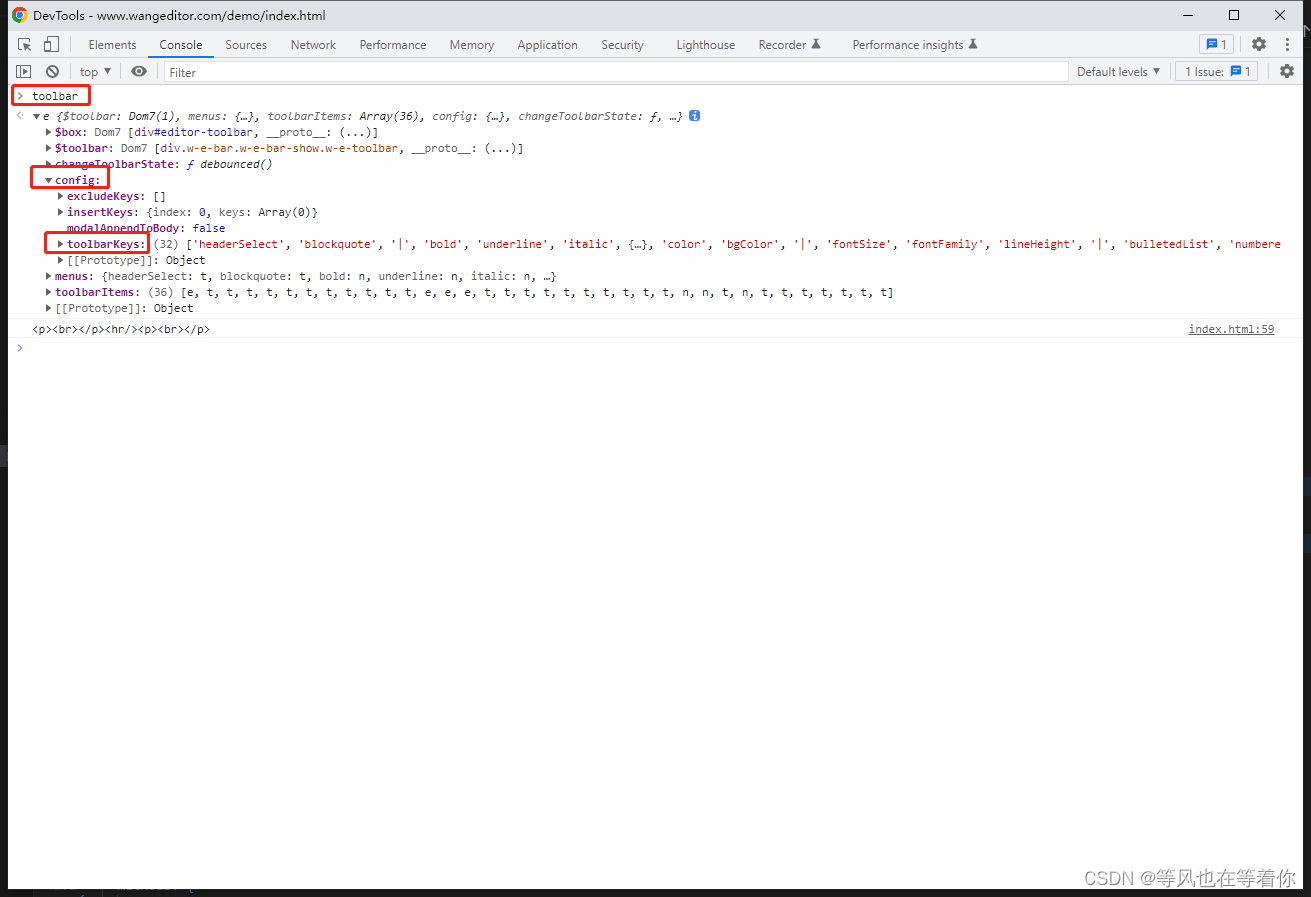
vue使用wangEditor
vue版本2.0;editor5.1.23版本;editor-for-vue:1.0.2版本 api文档入口 效果图 安装步骤入口 npm install wangeditor/editor --savenpm install wangeditor/editor-for-vue --save代码 <template><div><div style"bor…...

网络编程、socket编程、多进程并发服务器
网络编程 一、TCP编程的API socket: int socket(int domain, int type, int protocol); 返回值:> 0 代表函数调用成功,这个值是一个文件描述符< 0 代表函数调用失败 int domain:地址簇 AF_INET:IPv4 AF_INET6: IPv6 i…...

Elasticsearch:自动使用服务器时间设置日期字段并更新时区
在大多数情况下,你的数据包含一个以 create_date 命名的字段。 即使没有日期字段,处理各种格式和时区的日期对数据仓库来说也是一个重大挑战。 与此类似,如果要检测变化的数据,则必须准确设置日期字段。 在 Elasticsearch 中还有…...
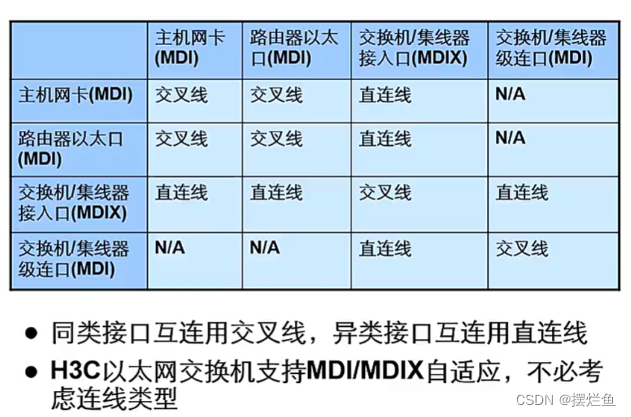
网络技术三:局域网基本原理
局域网基本原理 使用的协议及线缆 物理层 双绞线 同轴电缆 光纤 无线电 数据链路层 以太网 唯一事实标准 令牌环 淘汰 FDDI 光纤分布式接口 网络层 IP 唯一的事实标准 IPX 淘汰 Apple talk 淘汰 局域网设备 集线器 内部为总线型拓扑 任意时间只能由一台主机占用总线&a…...

Fine-tuning Large Enterprise Language Models via Ontological Reasoning
本文是LLM系列文章,针对《Fine-tuning Large Enterprise Language Models via Ontological Reasoning》的翻译。 基于本体论推理的大型企业语言模型微调 摘要1 引言2 微调LLM的神经符号管道3 通过概念证明进行初步验证4 结论 摘要 大型语言模型(LLM&am…...

ArcSWAT建模踩坑记:你的土壤数据库参数算对了吗?聊聊SPAW的那些默认值和单位陷阱
ArcSWAT土壤参数校准实战:避开SPAW计算中的5个致命误区 当水文模拟结果与实测数据出现系统性偏差时,经验丰富的建模者会首先检查土壤参数——这个隐藏在界面背后的"沉默变量"往往是误差的最大来源。SPAW作为ArcSWAT推荐的土壤参数计算工具&…...

别再死记硬背了!用这5个真实项目案例,彻底搞懂Python函数参数与返回值
别再死记硬背了!用这5个真实项目案例,彻底搞懂Python函数参数与返回值 函数是Python编程的基石,但很多初学者在学完基础语法后,面对实际项目依然无从下手。本文将通过5个真实开发场景,带你从"会用"到"懂…...

5分钟快速掌握Windows右键菜单终极管理神器ContextMenuManager
5分钟快速掌握Windows右键菜单终极管理神器ContextMenuManager 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 你是不是经常在右键文件时,面对几十个…...

AI智能体生态的包管理器:agenticmarket-cli 设计与实践
1. 项目概述:一个面向AI智能体生态的命令行工具如果你和我一样,长期在AI智能体(Agent)这个领域里折腾,那你肯定经历过这样的场景:为了测试一个最新的开源智能体框架,你需要先找到它的GitHub仓库…...

NVIDIA Profile Inspector深度解析:解锁显卡隐藏性能的实战指南
NVIDIA Profile Inspector深度解析:解锁显卡隐藏性能的实战指南 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector 你是否曾为游戏卡顿而烦恼?是否觉得显卡性能总差那么一点&#x…...

如何快速突破平台限制:跨平台Steam创意工坊模组下载终极指南
如何快速突破平台限制:跨平台Steam创意工坊模组下载终极指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 还在为Epic Games或GOG平台无法访问Steam创意工坊而烦恼…...

3分钟上手RePKG:轻松提取Wallpaper Engine壁纸资源的终极指南
3分钟上手RePKG:轻松提取Wallpaper Engine壁纸资源的终极指南 【免费下载链接】repkg Wallpaper engine PKG extractor/TEX to image converter 项目地址: https://gitcode.com/gh_mirrors/re/repkg 你是否曾经遇到过这样的困扰?在Wallpaper Engi…...

猫抓插件:5分钟掌握浏览器资源嗅探的终极武器
猫抓插件:5分钟掌握浏览器资源嗅探的终极武器 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在数字内容无处不在的今天,你…...

开源技能图谱工具SkillPort:Go语言构建的知识管理利器
1. 项目概述:一个技能图谱与知识管理的开源利器 最近在整理个人技术栈和团队知识库时,我一直在寻找一个能直观展示技能关联、又能深度管理学习路径的工具。市面上的笔记软件要么太“平”,只能线性记录;要么太“重”,像…...

EL线创客工作坊:从零到一的电致发光项目实践指南
1. 项目概述:为什么EL线工作坊是创客入门的绝佳选择如果你正在寻找一个能让新手快速上手、成品炫酷、且能完美融合电子与手工的创客项目,EL线工作坊几乎是一个无可挑剔的答案。EL,即电致发光,它不像LED那样依赖一个个分立的光点&a…...