leetcode:58. 最后一个单词的长度
题目:
函数原型:
int lengthOfLastWord(char * s)
解析:
求最后一个单词的长度,我们有两种思路
第一种思路:
逆向求,先设置一个字符串下标index,定位到最后一个单词的最后一个字符。再一个设置长度变量n,从后向前遍历,直到遇到“空格”或者下标index小于0停止遍历,每次前移n++,最后返回长度变量n
关键1:如何定位到最后一个单词的最后一个字符?
定位到最后一个单词的最后一个字符,即定位到字符串中最后一个非空格字符。我们可以通过求字符串长度,先定位到字符串的最后一个字符。如果该字符是空格,那么下标index前移,直到遇到非空格字符。这样我们就可以定位到最后一个单词的最后一个字符
关键2:最后一个单词长度,即变量n如何求?
当我们定位到最后一个单词的最后一个字符时,只要继续前移直到遇到空格字符或者下标小于0,前移的次数就是变量n的值,即最后一个单词的长度
关键3:为什么关键2中前移停止条件包含下标小于0呢?
因为如果字符串中只有一个单词,第一个单词就是最后一个单词,那么前移永远无法遇到空格字符,就会变为死循环,要想停下来下标index必须大于0
int lengthOfLastWord(char * s){
//定位到最后一个单词的最后一个字符
int size = strlen(s);
int index = size - 1;
while (s[index] == ' ')
{index--;
}//设置长度变量n
int n = 0;
while (index >= 0 && s[index] != ' ')
{index--;n++;
}return n;
}第二种思路:
正向求,先设置好字符串下标index和长度变量n,初始值都为0。 从前向后遍历,直到遍历完最后一个字符。每次遇到非空格字符,要判断一下当前字符的前一个字符是否为空格字符(判断条件还要加上index下标大于0),如果是,则说明此时正在遍历的是一个新的单词,前面的已经遍历的一定不是最后一个单词,长度变量n要重置为0。如果不是,长度变量n++。最后返回n。
关键1:为什么判断前一个字符是否为空格字符时需要加上index>0
因为当判断第一个字符的前一个字符是否为空格字符时,s [ index - 1]会越界,s[ -1 ]不存在
int lengthOfLastWord(char* s)
{int n = 0;int index = 0;while (s[index] != '\0')//从前向后遍历字符串{if (s[index] != ' '){if (index > 0 && s[index - 1] == ' ')//判断前一个字符是否为空格字符{n = 0;//新单词,重置长度变量}n++;}index++;}return n;
}
相关文章:
leetcode:58. 最后一个单词的长度
题目: 函数原型: int lengthOfLastWord(char * s) 解析: 求最后一个单词的长度,我们有两种思路 第一种思路: 逆向求,先设置一个字符串下标index,定位到最后一个单词的最后一个字符。再一个设置长…...

Electron 两个线程
Electron:它允许使用最初为Web应用程序开发的前端和后端组件开发桌面GUI应用程序:后端的Node.js运行时和前端的Chromium。 每个Electron应用都有两个线程:一个是主线程(处理应用窗口和启动),另一个是渲染线…...
基于YOLOv8和WiderFace数据集的人脸目标检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要:基于YOLOv8和WiderFace数据集的人脸目标检测系统可用于日常生活中检测与定位人脸目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用YOLOv8目标检测算…...
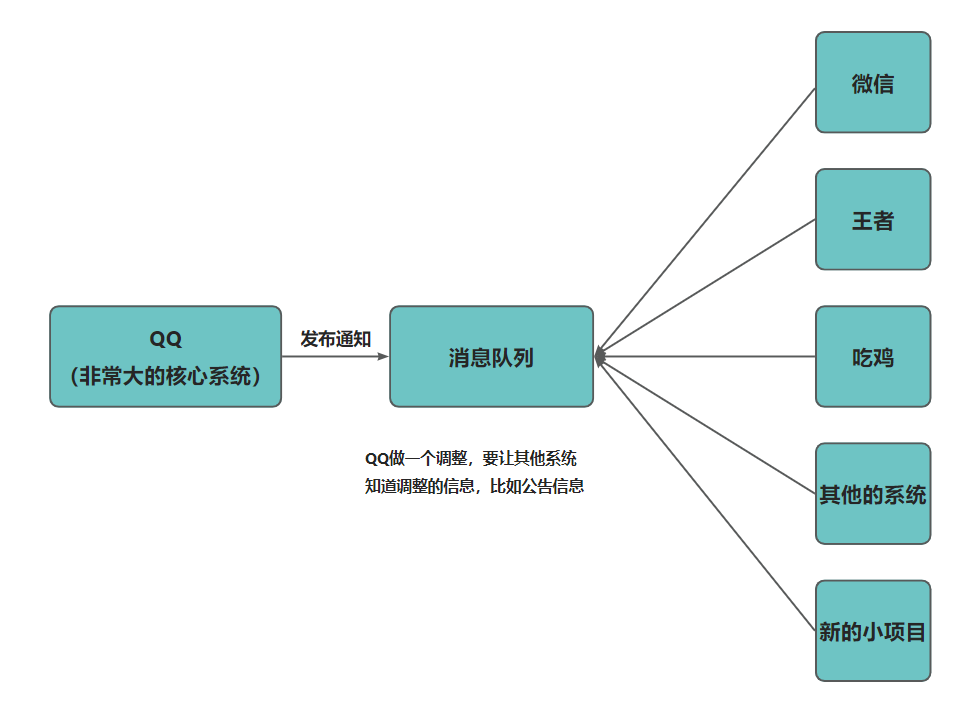
《消息队列》专栏介绍
《消息队列》专栏介绍 目录 《消息队列》专栏介绍专栏导言什么是消息队列呢?应用场景(作用) 为什么要用消息队列呢?异步处理削峰填谷 举个例子 分布式消息队列的优势 应用解耦优点发布订阅优点 分布式消息队列应用场景不同消息队列…...

各类工具使用详情【持续更新】
详解nc命令 https://blog.csdn.net/qq_42875470/article/details/114778326 xray工具使用 sqlmap工具使用 burp工具使用 nmap工具使用 appscan工具使用 fscan工具使用...

docker容器的安装和基础练习
目录 一.安装docker服务,配置镜像加速器 二.下载系统镜像(Ubuntu、 centos) 三.基于下载的镜像创建两个容器 (容器名一个为自己名字全拼,一个为首名字字母) 四.容器的启动、 停止及重启操作 五.怎么查…...

WordPress 后台密码忘记后,重置找回密码的 N 种方法
文章目录 一、通过其他管理员修改密码二、通过电子邮件找回密码三、通过 MySQL 命令行设置新密码四、主题文件functions.php添加代码重置密码五、使用官方脚本重置密码 忘记密码是每个人都会遇到的事情,长时间不登录 WordPress 站点后,作为管理员的你&am…...
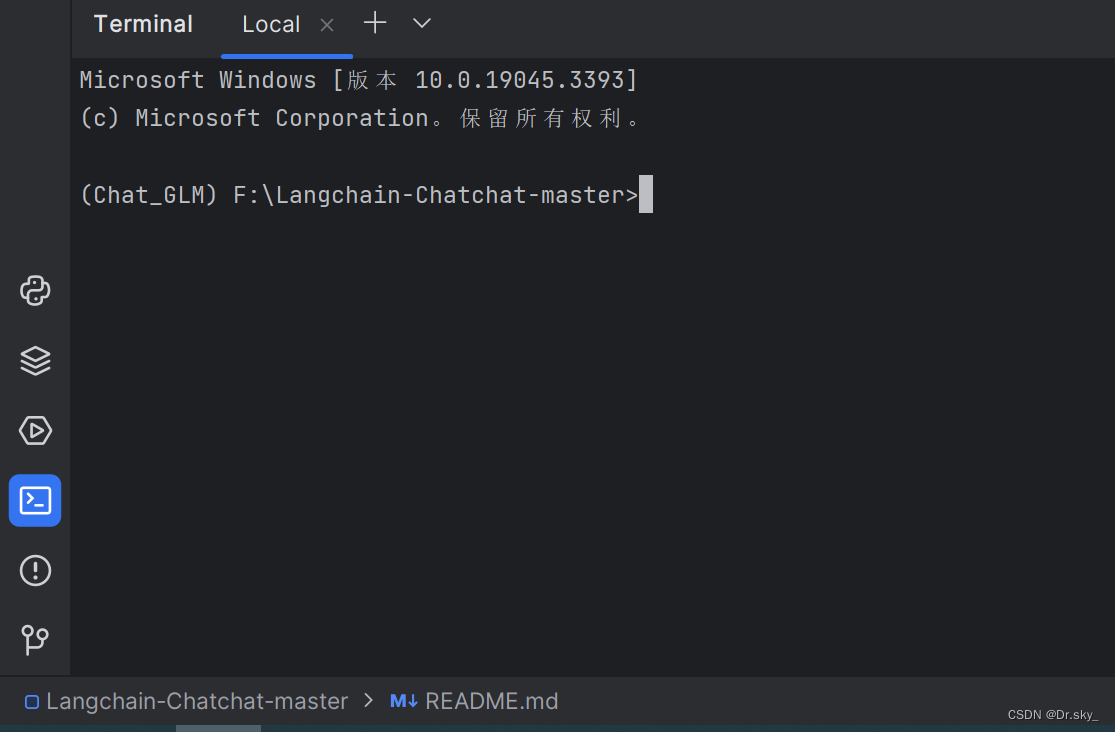
将PyCharm中的终端运行前面的PS修改成当前环境
最近使用Pycharm中的Terminal来pip安装一些pakage,发现Terminal运行前面的显示的是PS,然后输入安装指令报错。“python无法将“pip”项识别为 cmdlet、函数、脚本文件或可运行程序的名称。” 解决方法: 只需要在pycharm的设置中修改一些termi…...
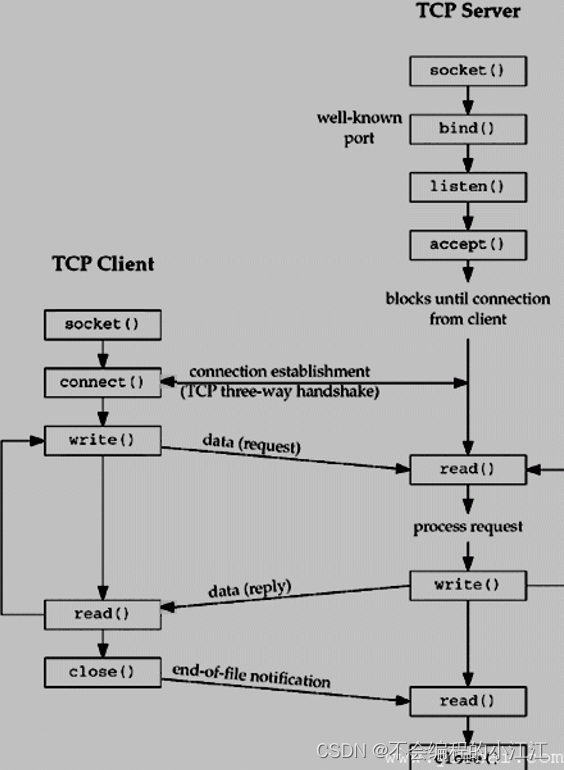
Linux系统编程—socket网络编程
Linux系统编程—socket网络编程 理论概念1. TCP与UDP对比端口号作用 socket开发过程服务端1. socket 创建套接字2. bind 绑定IP端口3. listen 监听客户端4. accept 接收客户端5. read / write 数据传输 客户端1. socket 创建套接字2. connect 连接服务3. read / write 数据传输…...

函数指针
函数指针是一种特殊类型的指针,它指向一个函数而不是指向数据。函数指针允许你在程序运行时动态地选择要调用的函数,这对于实现回调函数、事件处理、动态加载库和创建通用函数接口等任务非常有用。 1. 声明函数指针 要声明一个函数指针,你需…...
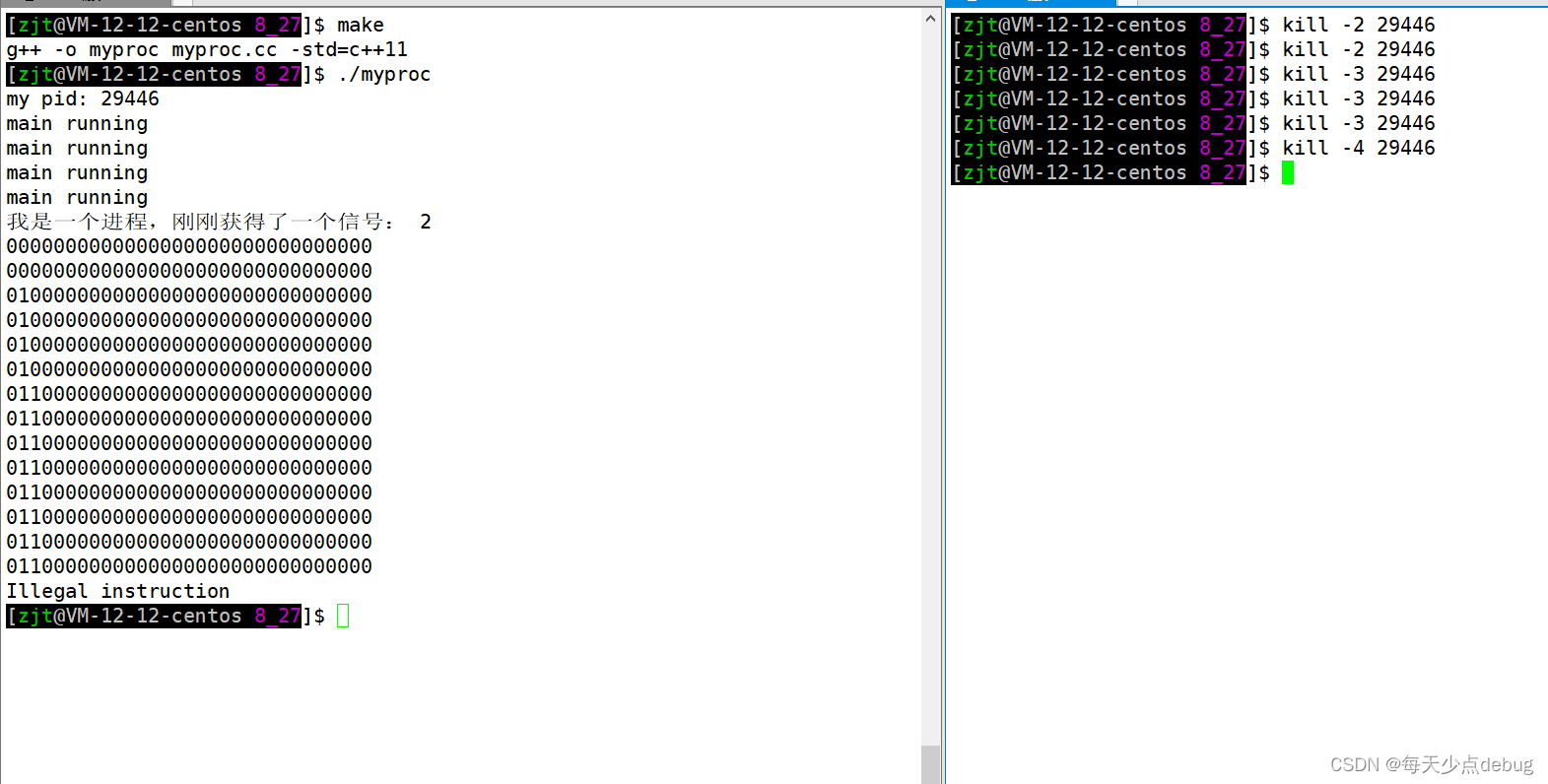
Linux——进程间信号(超级详解!!)
索引 一.初始信号1.什么是信号2.前后台进程3.信号的种类4.信号的管理 二.信号产生前1.验证键盘是可以产生信号的2.通过系统调用接口发送信号3.由软件条件产生信号4.硬件异常产生信号5.总结6.core dump 信号产生中1.信号在内核中的表示2.信号集操作函数 信号产生后1.了解内核态和…...

C++ STL库的介绍和使用
文章目录 C STL库的介绍和使用STL六大组件算法的分类迭代器 一个简单的例子容器和自定义类型容器嵌套容器常用容器stringvectordequestackqueuelistset/multisetpairmap/multimap 容器的使用时机函数对象(仿函数)谓词内建函数对象适配器bind2nd和bind1st…...
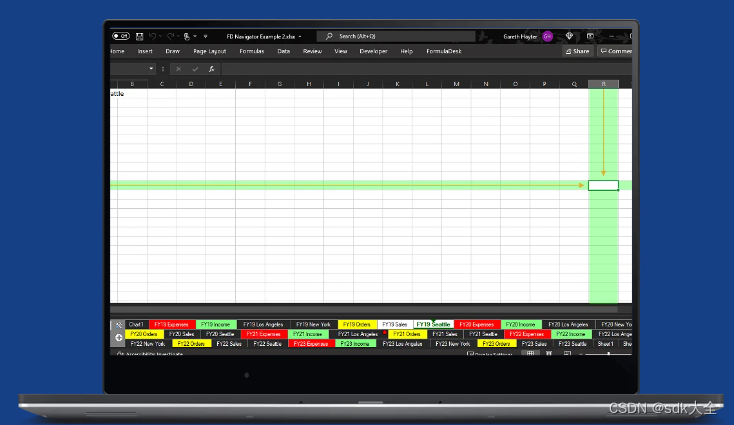
Excel数学、工程和科学计算插件:FORMULADESK Studio
如果 Excel 是您的武器 - 让我们磨砺您的剑!为整天使用 Excel 的人们提供创新的 Excel 加载项,你需要这个 FORMULADESK Studio。。。 Excel 插件为任何使用 Excel 执行数学、工程和科学计算的人提供了必备工具。 * 将公式视为真正的数学方程 * 为您的公…...

大规模 Spring Cloud 微服务无损上下线探索与实践
文章目录 什么是无损上下线?大规模 Spring Cloud 微服务架构实现无损上下线的挑战无损上下线的实践1. 使用负载均衡器2. 使用数据库迁移工具3. 动态配置管理4. 错误处理和回滚 未来的趋势1. 容器编排2. 服务网格3. 自动化测试和验证 结论 🎉欢迎来到云原…...

【LeetCode】剑指 Offer 54. 二叉搜索树的第k大节点
题目: 给定一棵二叉搜索树,请找出其中第 k 大的节点的值。 示例 1: 输入: root [3,1,4,null,2], k 13/ \1 4\2 输出: 4 示例 2: 输入: root [5,3,6,2,4,null,null,1], k 35/ \3 6/ \2 4/1 输出: 4 限制: 1 ≤ k ≤ 二叉搜索树…...
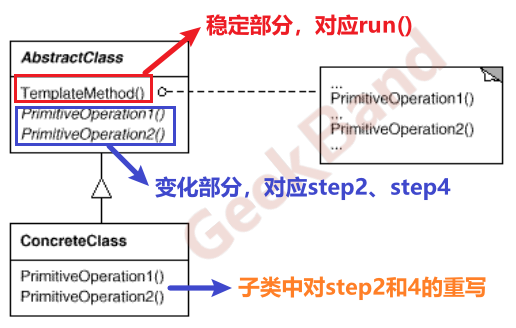
C++设计模式_03_模板方法Template Method
文章目录 1. 设计模式分类1.1 GOF-23 模式分类1.2 从封装变化角度对模式分类 2. 重构(使用模式的方法)2.1 重构获得模式 Refactoring to Patterns2.2 重构关键技法 3. “组件协作”模式4. Template Method 模式4.1 动机( Motivationÿ…...
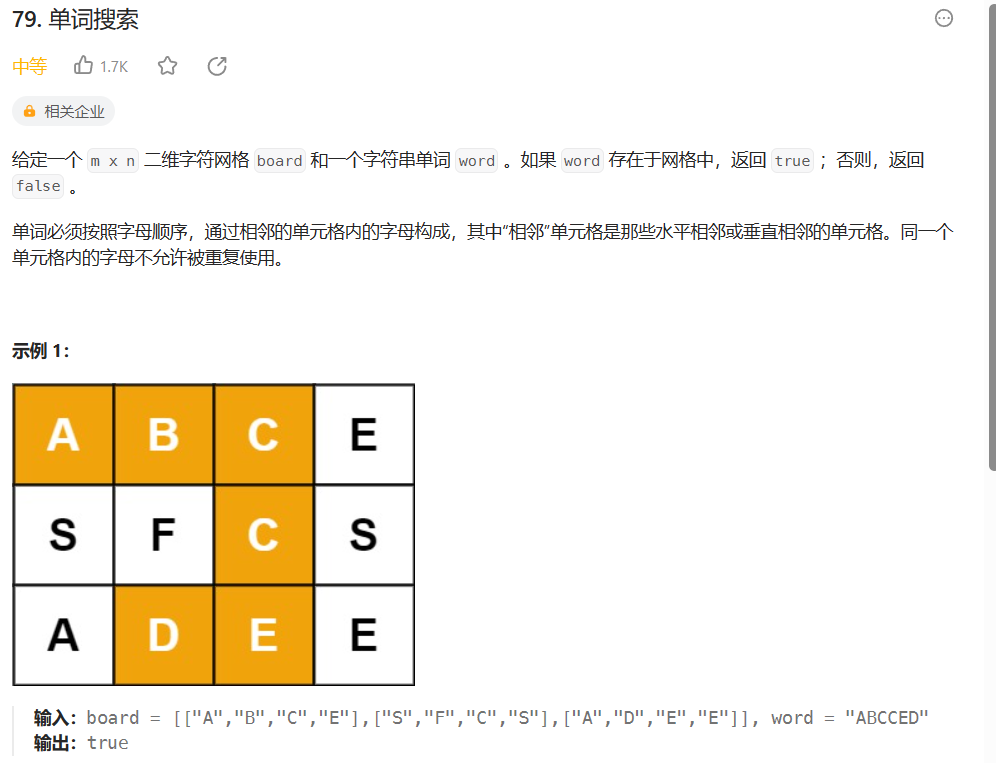
【LeetCode-中等题】79. 单词搜索
文章目录 题目方法一:递归 回溯 题目 方法一:递归 回溯 需要一个标记数组 来标志格子字符是否被使用过了先找到word 的第一个字符在表格中的位置,再开始递归递归的结束条件是如果word递归到了最后一个字符了,说明能在矩阵中找到单…...

揭秘iPhone 15 Pro Max:苹果如何战胜三星
三星Galaxy S23 Ultra在我们的最佳拍照手机排行榜上名列前茅有几个原因,但iPhone 15 Pro Max正在努力夺回榜首——假设它有一个特定的功能。别误会我的意思,苹果一直在追赶三星,因为它的iPhone 14 Pro和14 Pro Max都表现强劲。尽管如此&#…...
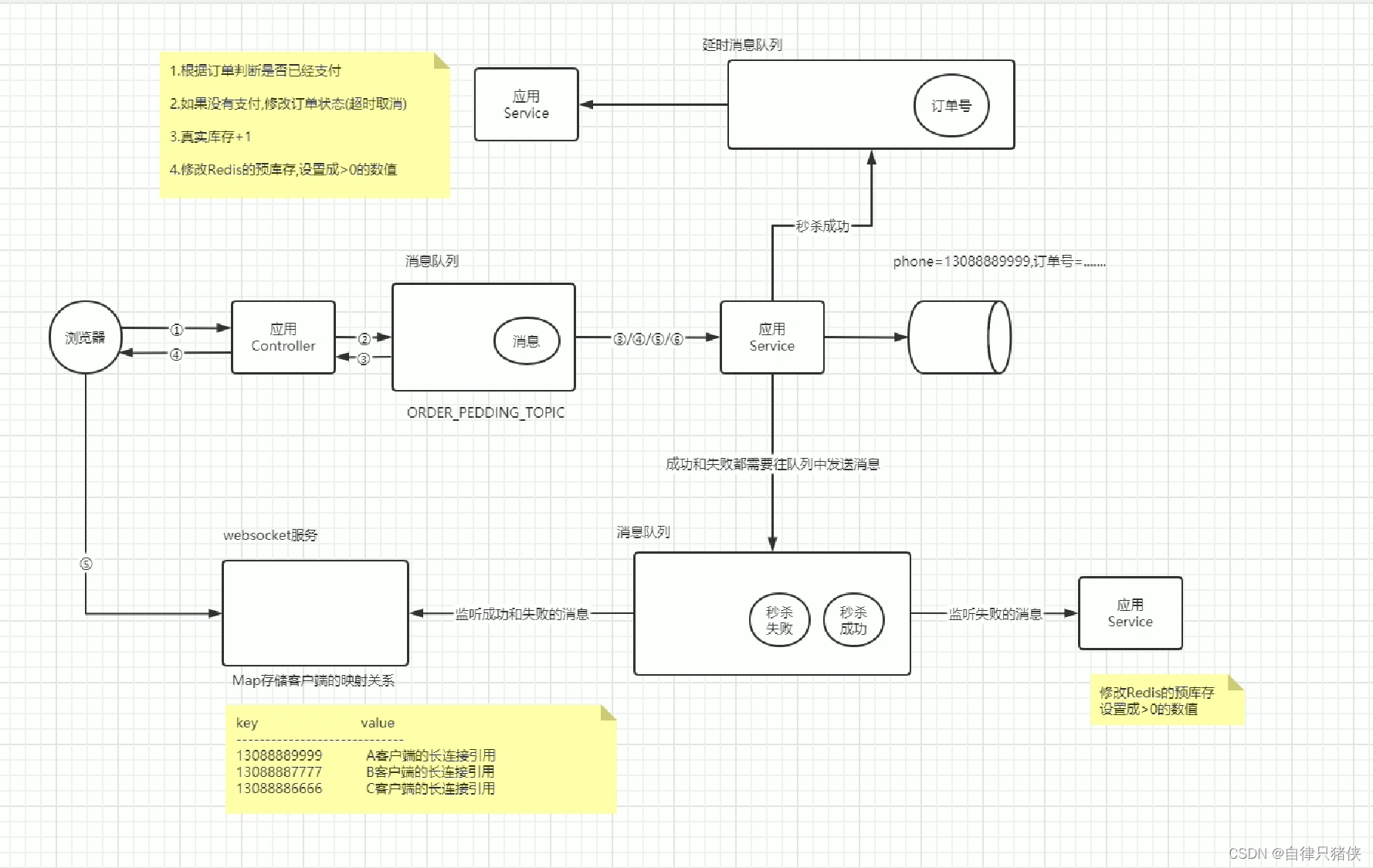
分布式秒杀方案--java
前提:先把商品详情和秒杀商品缓存redis中,减少对数据库的访问(可使用定时任务) 秒杀商品无非就是那几步(前面还可能会有一些判断,如用户是否登录,一人一单,秒杀时间验证等࿰…...
高频golang面试题:简单聊聊内存逃逸?
文章目录 问题怎么答举例 问题 知道golang的内存逃逸吗?什么情况下会发生内存逃逸? 怎么答 golang程序变量会携带有一组校验数据,用来证明它的整个生命周期是否在运行时完全可知。如果变量通过了这些校验,它就可以在栈上分配。…...

Sunshine游戏串流服务器架构深度解析:5个高级性能调优技巧与源码设计实战
Sunshine游戏串流服务器架构深度解析:5个高级性能调优技巧与源码设计实战 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine Sunshine作为一款开源的自托管游戏串流服务器…...

突破禾本科转化壁垒:农杆菌介导谷子基因编辑的关键参数解析 伯远生物
摘要:谷子(Setaria italica)作为C4禾谷类模式作物,其CRISPR基因编辑效率高度依赖稳定的遗传转化体系。针对谷子基因型依赖性强、愈伤再生困难等痛点,本文系统梳理了以胚性愈伤组织为核心的农杆菌转化流程,详…...
)
终极指南:如何在Mac上免费创建Windows启动盘(3步教程)
终极指南:如何在Mac上免费创建Windows启动盘(3步教程) 【免费下载链接】windiskwriter 🖥 Windows Bootable USB creator for macOS. 🛠 Patches Windows 11 to bypass TPM and Secure Boot requirements. ὇…...

Fansly下载器完整指南:3分钟掌握免费离线下载技巧
Fansly下载器完整指南:3分钟掌握免费离线下载技巧 【免费下载链接】fansly-downloader Easy to use fansly.com content downloading tool. Written in python, but ships as a standalone Executable App for Windows too. Enjoy your Fansly content offline anyt…...

5分钟极速上手:B站视频转文字工具bili2text完整指南
5分钟极速上手:B站视频转文字工具bili2text完整指南 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 还在为整理B站视频内容而烦恼吗?每…...

【职场】为什么越努力的人,在职场死得越惨?
为什么越努力的人,在职场死得越惨? ——没有人告诉你,努力本身是一种暴露。一、先说一个你亲眼见过,但从没想明白的现象 你身边一定有这样的人: 工作最拼的那个,最后被裁了。 加班最多的那个,升…...
)
手把手教你用STM32F103C8T6驱动NRF24L01模块(附完整代码与避坑指南)
STM32F103C8T6与NRF24L01无线通信实战:从硬件对接到代码调试全解析 在物联网和智能硬件快速发展的今天,无线通信技术已成为嵌入式系统设计中不可或缺的一环。NRF24L01作为一款性价比极高的2.4GHz无线收发模块,配合STM32F103C8T6这类主流微控制…...

uniCloud云函数实战:从‘Hello World’到连接数据库的完整数据流指南
uniCloud云函数实战:从‘Hello World’到连接数据库的完整数据流指南 在当今快速迭代的互联网开发领域,后端服务的轻量化与敏捷部署已成为开发者关注的焦点。uniCloud作为一款面向全栈开发的云服务平台,其云函数功能让前端开发者也能轻松处理…...

COMSOL电磁超声仿真避坑指南:从‘域不适用’报错到结果收敛的完整调试流程
COMSOL电磁超声仿真避坑指南:从‘域不适用’报错到结果收敛的完整调试流程 电磁超声仿真作为多物理场耦合的典型应用场景,其复杂性往往让即使有一定COMSOL基础的用户也频频"踩坑"。当你在深夜盯着屏幕上鲜红的"域不适用"报错&#x…...

普冉PY32F003单片机PWM呼吸灯实战:从8ms定时器中断到10KHz波形平滑调节
普冉PY32F003单片机PWM呼吸灯实战:从8ms定时器中断到10KHz波形平滑调节 在嵌入式开发中,PWM(脉冲宽度调制)技术是实现LED亮度渐变、电机调速等功能的基石。普冉PY32F003作为一款高性价比的32位单片机,其定时器模块的灵…...