yocto stm32mp1集成ros
yocto stm32mp1集成ros
- yocto集成ros
- 下载meta-ros
- yocto集成ros
- rootfs验证
yocto集成ros
本章节介绍yocto如何集成ros系统用来作机器人开发。
下载meta-ros
第一步首先需要下载meta-ros layer,meta-ros的链接如下:https://github.com/ros/meta-ros/tree/master,在我们的yocto源码layers路径下执行如下指令:
git clone https://github.com/ros/meta-ros.git
下载完成以后如下:

完成以后需要进入到meta-ros里面切换匹配yocto版本的分支,比如我当前使用的yocto版本是dunfell即yocto 3.1,这样我们也需要切换meta-ros到对应的dunfell分支上。
cd meta-ros
git chekcout remotes/origin/dunfell
这样我们的meta-ros layer就准备好了。
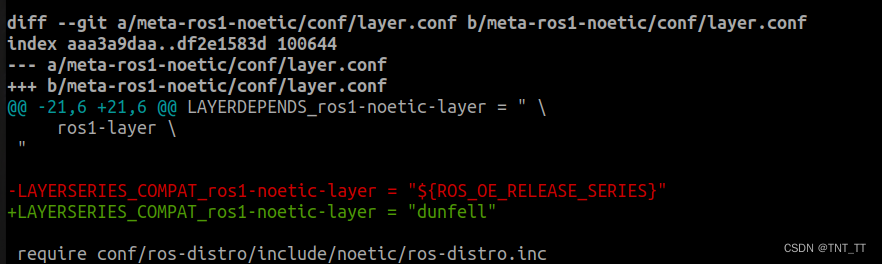
这里后面遇到一个编译问题,提示meta-layer不兼容,作了一个小改动,如果遇到同样问题可以尝试以下:
修改你需要集成的ros版本里面的LAYERSERIES_COMPAT_属性为你当前yocto的版本
yocto集成ros
- 添加编译支持
首先我们需要将meta-ros layer添加到我们的编译系统中来,在conf/bblayers.conf里面添加如下配置:
# ROS
ADDONSLAYERS += " \${OEROOT}/layers/meta-ros/meta-ros-backports-hardknott \${OEROOT}/layers/meta-ros/meta-ros-backports-gatesgarth \${OEROOT}/layers/meta-ros/meta-ros-common \${OEROOT}/layers/meta-ros/meta-ros1 \${OEROOT}/layers/meta-ros/meta-ros1-noetic \"
注意我这里集成的是ros1 noetic版本,如果你需要集成其他版本按照你的需求写就好了,前面4个为meta-ros1-noetic 的依赖layer,如果你和我版本不同请根据你的依赖关系填写。到此应该就可以编译ros系统了,可以尝试使用如下指令来编译ros:
bitbake ros-image-core
- 添加ros打包
如果上面的编译成功的话下一步就可以开始集成我们的rros到rootfs里面了,在我们的rootfs的bb文件里面添加一行如下内容:这个会追加ros的ros-core turtlesim 两个组件到rootfs,后续如果有其他package需求往里面加就好了。
CORE_IMAGE_EXTRA_INSTALL += " ros-core turtlesim "
rootfs验证
按照第二部做完正常情况下ros的 ros-core turtlesim 就应该已经集成到根文件系统了,下面使用ros自带的测试节点测试ros是否能正常工作
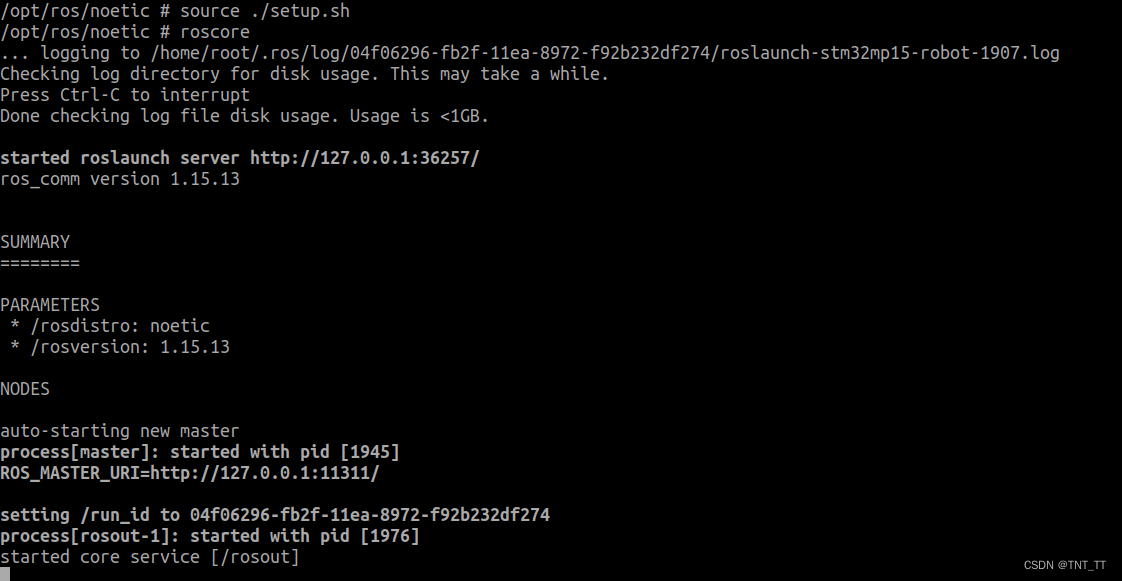
- 启动roscore
登陆到板子上,打开一个终端,执行如下指令:
source /opt/ros/noetic/setup.sh
roscore
执行效果如下:
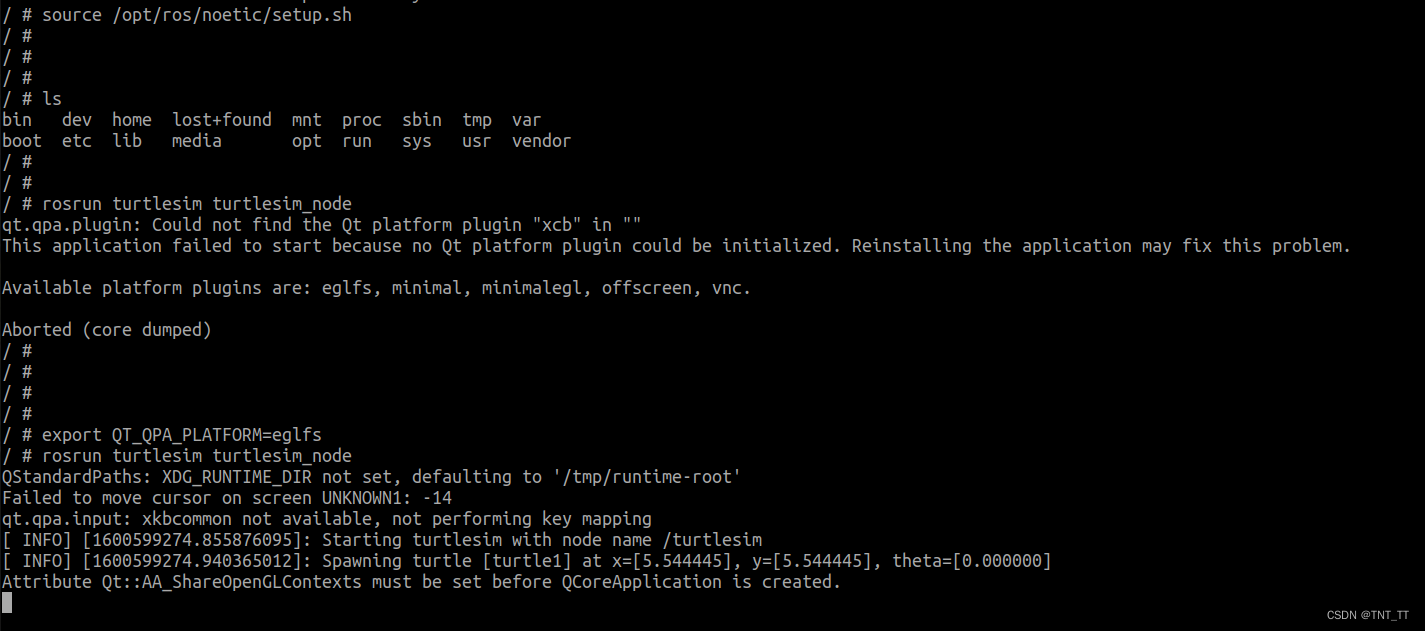
- 启动UI
这一步依赖你的板子连接好屏幕,然后rootfs里面有qt系统支持, 然后重新启动一个终端登陆进板子,执行如下指令:
source /opt/ros/noetic/setup.sh
rosrun turtlesim turtlesim_node
这里注意以下因为我板子上的qt系统后端是使用eglfs的,和ros默认的xcb不同,直接执行会coredump,所以我使用export QT_QPA_PLATFORM=eglfs指定了QT的后端使用eglfs,这样就能正常运行了,下面是操作截图:
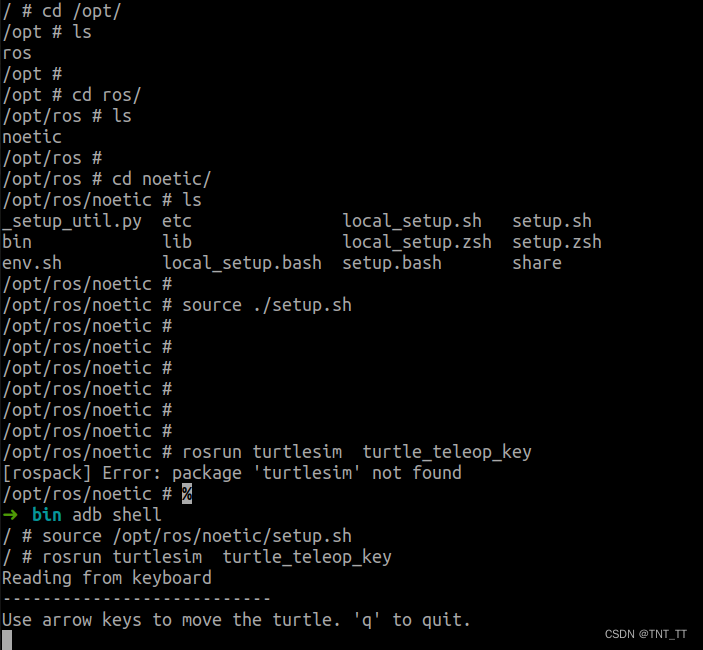
- 启动终端控制
这一部需要在开一个终端连接到板子上,执行如下指令:
source /opt/ros/noetic/setup.sh
rosrun turtlesim turtle_teleop_key
这样在这个终端里面就可以使用上下左右的键盘来控制UI上的小海龟移动拉
下面贴一张实际在板子上的运行状态照片:

默认的ui在板子上显示有点问题,不过不影响测试,小海龟的白色路径就是用键盘控制画出来的。集成工作结束,下面就能愉快的开发ros拉
相关文章:
yocto stm32mp1集成ros
yocto stm32mp1集成ros yocto集成ros下载meta-rosyocto集成rosrootfs验证 yocto集成ros 本章节介绍yocto如何集成ros系统用来作机器人开发。 下载meta-ros 第一步首先需要下载meta-ros layer,meta-ros的链接如下:https://github.com/ros/meta-ros/tre…...
Linux 中的 chroot 命令及示例
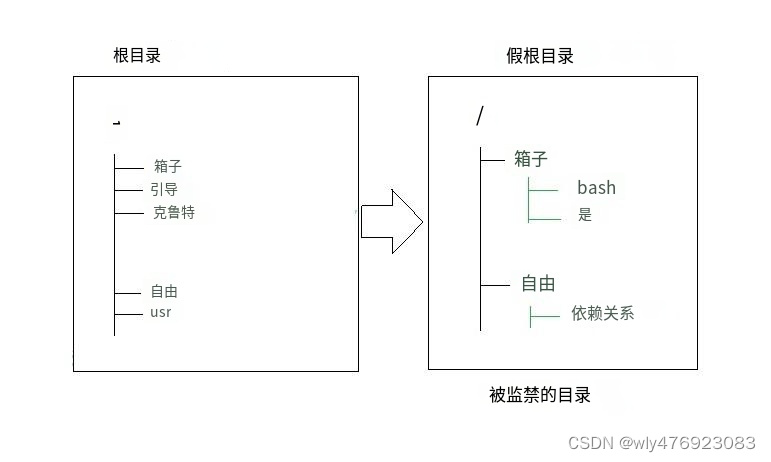
Linux/Unix系统中的chroot命令用于更改根目录。Linux/Unix 类系统中的每个进程/命令都有一个称为root 目录的当前工作目录。它更改当前正在运行的进程及其子进程的根目录。 在此类修改的环境中运行的进程/命令无法访问根目录之外的文件。这种修改后的环境称为“ chroot监狱”或…...

oracle的redo与postgreSQL的WAL以及MySQL的binlog区别
Oracle的redo日志、PostgreSQL的WAL(Write-Ahead Log)以及MySQL的binlog(二进制日志)都是数据库的事务日志,但它们在实现和功能上有一些区别。 1. 实现方式: - Oracle的redo日志是通过在事务提交前将事务操作记录到磁盘上的重做日志文件中来实现的。 - PostgreSQL…...

进入低功耗和唤醒
休眠模式 进入休眠模式 如果使用 WFI 指令进入睡眠模式,则嵌套向量中断控制器 (NVIC) 确认的任意外设中断都会 将器件从睡眠模式唤醒。 如果使用 WFE 指令进入睡眠模式,MCU 将在有事件发生时立即退出睡眠模式。唤醒事件可 通过以下方式产生ÿ…...
【多线程】volatile 关键字
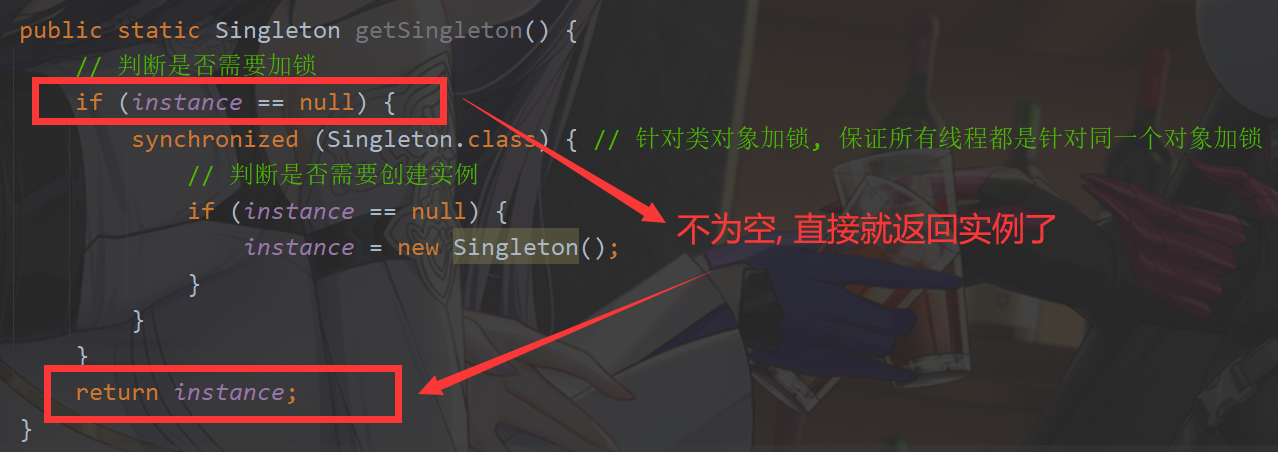
volatile 关键字 1. 保证内存可见性2. 禁止指令重排序3. 不保证原子性 1. 保证内存可见性 内存可见性问题: 一个线程针对一个变量进行读取操作,另一个线程针对这个变量进行修改操作, 此时读到的值,不一定是修改后的值,即这个读线…...

【Windows注册表内容详解】
Windows注册表内容详解 第一章节 注册表基础 一、什么是注册表 注册表是windows操作系统、硬件设备以及客户应用程序得以正常运行和保存设置的核心“数据库”,也可以说是一个非常巨大的树状分层结构的数据库系统。 注册表记录了用户安装在计算机上的软件和每个程…...
大数据Hadoop入门之集群的搭建
hadoop的三种运行模式 本地模式:测试本地的hadoop是否能够运行,用来运行官方的代码。伪分布模式:原先有人拿来测试,目前测试都不用这个模式了。完全分布模式:多台服务器组成分布式环境,生产环境使用 分布式主机文件同步命令 sc…...

华为云云耀云服务器L实例评测|基于云服务器的minio部署手册
华为云云耀云服务器L实例评测|基于云服务器的minio部署手册 【软件安装版本】【集群安装(是)(否)】 版本 创建人 修改人 创建时间 备注 1.0 jz jz 2023.9.2 minio华为云耀服务器 一. 部署规划与架…...

龙智携手Atlassian和JFrog举办线下研讨会,探讨如何提升企业级开发效率与质量
2023年9月8日,龙智将携手Atlassian和JFrog于上海举办线下研讨会,以“大规模开发创新:如何提升企业级开发效率与质量”为主题,邀请龙智高级咨询顾问、Atlassian认证专家叶燕秀,紫龙游戏上海研发中心高级项目管理主管叶凯…...

2023数学建模国赛A题定日镜场的优化设计- 全新思路及代码
背景资料关键信息和要点如下: 定日镜:塔式太阳能光热发电站的基本组件,由纵向转轴和水平转轴组成,用于反射太阳光。 定日镜场:由大量的定日镜组成的阵列。 集热器:位于吸收塔顶端,用于收集太…...

CSS笔记(黑马程序员pink老师前端)圆角边框
圆角边框 border-radius:length; 效果显示 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Documen…...
水表电表集中远程抄表系统分析
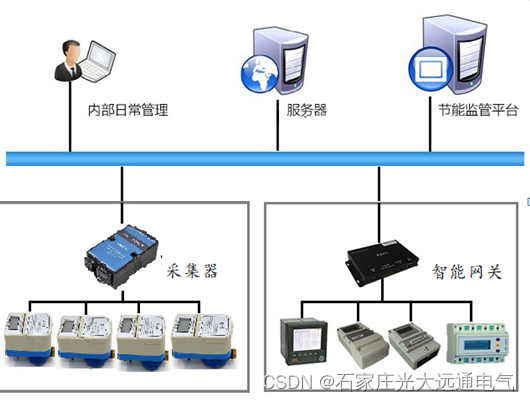
电表水表远程抄表系统石家庄光大远通电气有限公司主要经营自动抄表,远程抄表,集中抄表,新供应信息,是石家庄光大远通电气有限公司自动远程抄表系统集信号采集、网络通信于一体的高性能抄表装置,该系统以485通讯方式读取水表电表的数据,以MBUS通讯方式读取…...

Android 通知
1. 原生Android通知的几种显示方式: 状态栏的图标:发出通知后,通知会先以图标的形式显示在状态栏中。 抽屉式通知栏:用户可以在状态栏向下滑动以打开抽屉式通知栏,并在其中查看更多详情及对通知执行操作。在应用或用户…...
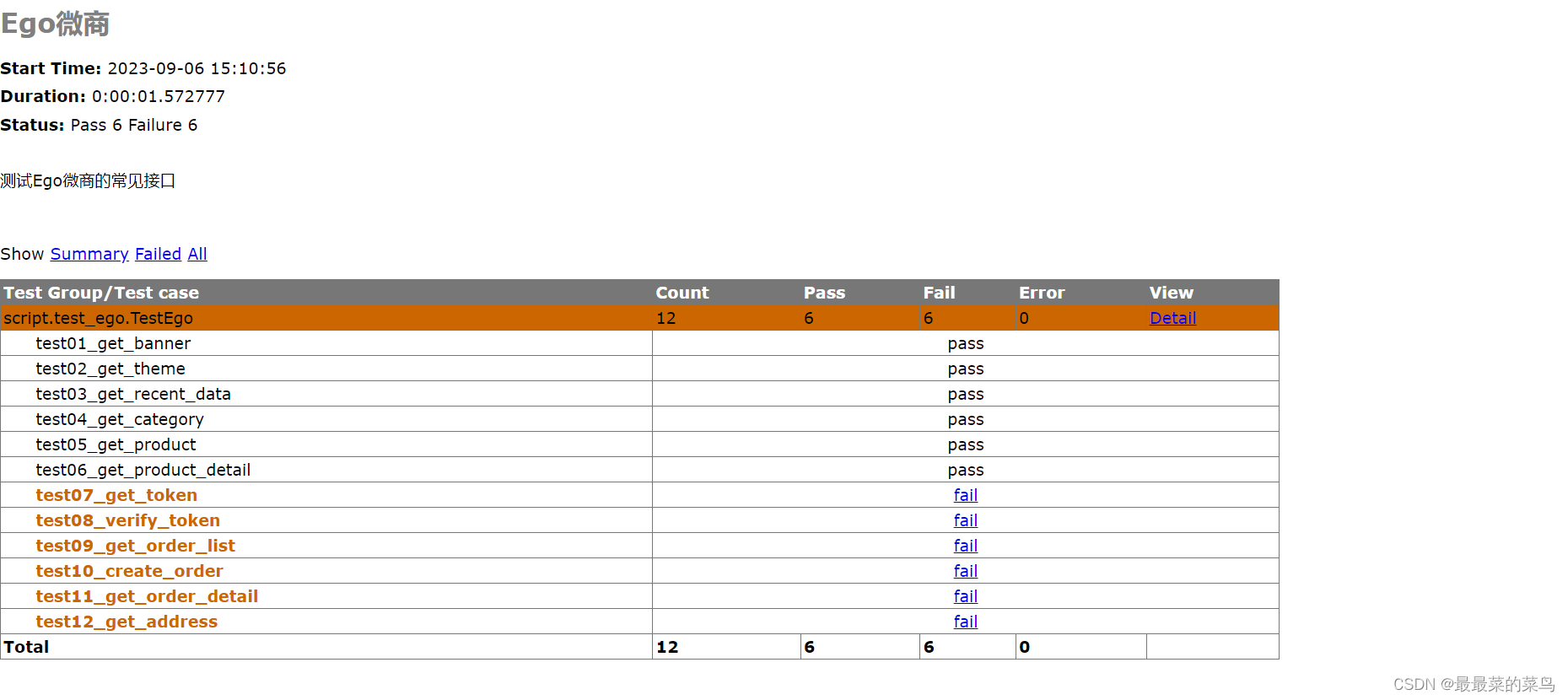
【Unittest】Requests实现小程序项目接口测试
文章目录 一、搭建接口测试框架二、初始化日志三、定义全局变量四、封装接口五、编写测试用例六、生成测试报告 一、搭建接口测试框架 目录结构如下。 二、初始化日志 在utils.py文件中编写如下如下代码,初始化日志。 # 导入app.py全局变量文件 import app import l…...

Mac 搭建本地服务器
文章目录 一、启动服务器二、添加文件到本地服务三、手机/其他电脑 访问本机服务器 MacOS 自带Apatch 服务器。所以我这里选择Apatch服务器搭建 一、启动服务器 在safari中输入 http://127.0.0.1/ ,如果页面出现 it works,则代表访问成功。启动服务器 …...

区块链基础之编写合约二
一、了解solidity中的关键字。 二、了解solidity中的类型。 三、编写合约 1.这里列出一些solidity中的关键字,有哪些。 pragma 作用:是告知编译器如何处理源代码的通用指令(例如, pragma once )。public 作用&#…...

【前端基础】js 如何判断一个值是数组
在JavaScript中,可使用不同的方法来判断一个值是否是一个数组。以下是一些常用的方法: 使用 Array.isArray() 方法: if (Array.isArray(value)) {// 值是一个数组 } else {// 值不是一个数组 }Array.isArray() 方法是最简单和推荐的方法&…...

Linux之NFS服务器
目录 Linux之NFS服务器 简介 NFS背景介绍 生产应用场景 NFS工作原理 NFS工作流程图 流程 NFS的安装 安装nfs服务 安装rpc服务 启动rpcbind服务同时设置开机自启动 启动nfs服务同时设置开机自启动 NFS的配置文件 主配置文件分析 示例 案例 --- 建立NFS服务器&#…...

ES delete_by_query条件删除的几种方式
es 查询删除的几种方式 1.根据id删除 #根据id删除 POST /indexname/_delete_by_query {"query": { "match": {"id": "100000"}} } 2.根据多个id删除 #根据多个id删除 POST /indexname/_delete_by_query {"query": {"…...

1.springboot 集成elasticsearch组件
1.前置条件已经安装和搭建好了elasticsearch中间件 一:项目中引入elasticsearch相关依赖 我安装的elasticsearch版本是7.10.2 对应依赖的版本保持一致 此处省略springboot 搭建及必要的依赖项 <dependency><groupId>org.elasticsearch.client</group…...

三星48层3D V-NAND深度拆解:从电荷陷阱架构到存储密度革命
1. 初探三星48层3D V-NAND:一次深度拆解与工艺解析作为一名长期关注半导体存储技术的从业者,每次拿到业界巨头的新品进行物理层面的拆解分析,都像是一次充满惊喜的“寻宝”之旅。2016年初,当三星将其早在2015年8月就已预告的256Gb…...

Windows和Office激活难题?KMS智能激活脚本让你轻松告别烦恼
Windows和Office激活难题?KMS智能激活脚本让你轻松告别烦恼 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 你是否曾经因为Windows系统突然弹出激活提示而中断工作?是否遇…...

GPU资源利用率深度解析与优化实践
1. GPU资源利用率的核心概念与测量方法在HPC(高性能计算)领域,GPU资源利用率是评估计算效率的黄金指标。不同于简单的"使用率"概念,真正的GPU利用率是一个多维度的综合指标,涉及计算核心、内存控制器、缓存体…...

Arm Forge工具在高性能计算中的性能分析与优化实践
1. Arm Forge性能分析工具概述高性能计算(HPC)领域的开发者们经常面临一个共同挑战:如何从复杂的并行程序中榨取出最后一点性能潜力。Arm Forge作为一套专业的性能分析工具链,为这个难题提供了系统化的解决方案。我在多个超算中心的实际调优工作中发现&a…...

Python自动化交易:Kalshi预测市场API封装与量化策略实践
1. 项目概述:一个为Kalshi预测市场打造的自动化工具箱如果你对预测市场感兴趣,或者正在寻找一种程序化的方式来管理你在Kalshi平台上的交易活动,那么你可能会对这个名为kalshi-skill的项目产生共鸣。简单来说,这是一个基于Python的…...

记一次ubuntu 22.04安装旧版 MongoDB 4.2
22.04版本比较新,由于mongodb 2.4太老了,安装会遇到问题。特此记录1. 下载mongodb包wget https://fastdl.mongodb.org/linux/mongodb-linux-x86_64-ubuntu1804-4.2.24.tgz2. 解压到当前目录sudo tar -zxvf mongodb-linux-x86_64-ubuntu1804-4.2.24.tgz3.…...

Crystal语言Web框架实战:构建高性能API服务的轻量级方案
1. 项目概述:一个轻量级、高性能的Crystal语言Web框架最近在探索一些新兴的编程语言生态时,我注意到了Crystal语言,以及一个名为jvpflum/Crystal的GitHub仓库。乍一看这个标题,可能会让人有些困惑:这究竟是Crystal语言…...

Yaskawa JACP-317800输入输出模块
安川JACP-317800是一款高性能逻辑输入输出模块,隶属于安川CP-317系列PLC系统,专为工业自动化领域的数字信号采集与控制而设计。产品特点:产品类型为逻辑输入输出模块,作为PLC与现场设备之间的信号接口模块重量仅0.3公斤࿰…...

3PEAK思瑞浦 TPA3532-VS1R MSOP8 运算放大器
特性 超低输入偏置电流: -在TA25C时最大士1pA(实验室测试限值) 安 -在-40C至125C(实验室测试限值)下,最大30皮 低输入失调电压:250V(最大值) 集成保护缓冲器,最大偏移电压为200V 低电压噪声密度:18nV/vHz(在1kHz时) 宽带宽:2.1MHz 供电电压:4.5V至16V(2.…...
Translumo:Windows游戏实时翻译的终极免费解决方案:如何轻松翻译游戏字幕和视频文本
Translumo:Windows游戏实时翻译的终极免费解决方案:如何轻松翻译游戏字幕和视频文本 【免费下载链接】Translumo Advanced real-time screen translator for games, hardcoded subtitles in videos, static text and etc. 项目地址: https://gitcode.c…...