使用CUDA计算GPU的理论显存带宽
文章目录
- 一、显存带宽和理论显存带宽
- 1. 显存带宽
- 2. 理论显存带宽
- 1)计算公式
- 2)举例
- 二、利用CUDA计算理论显存带宽
一、显存带宽和理论显存带宽
1. 显存带宽
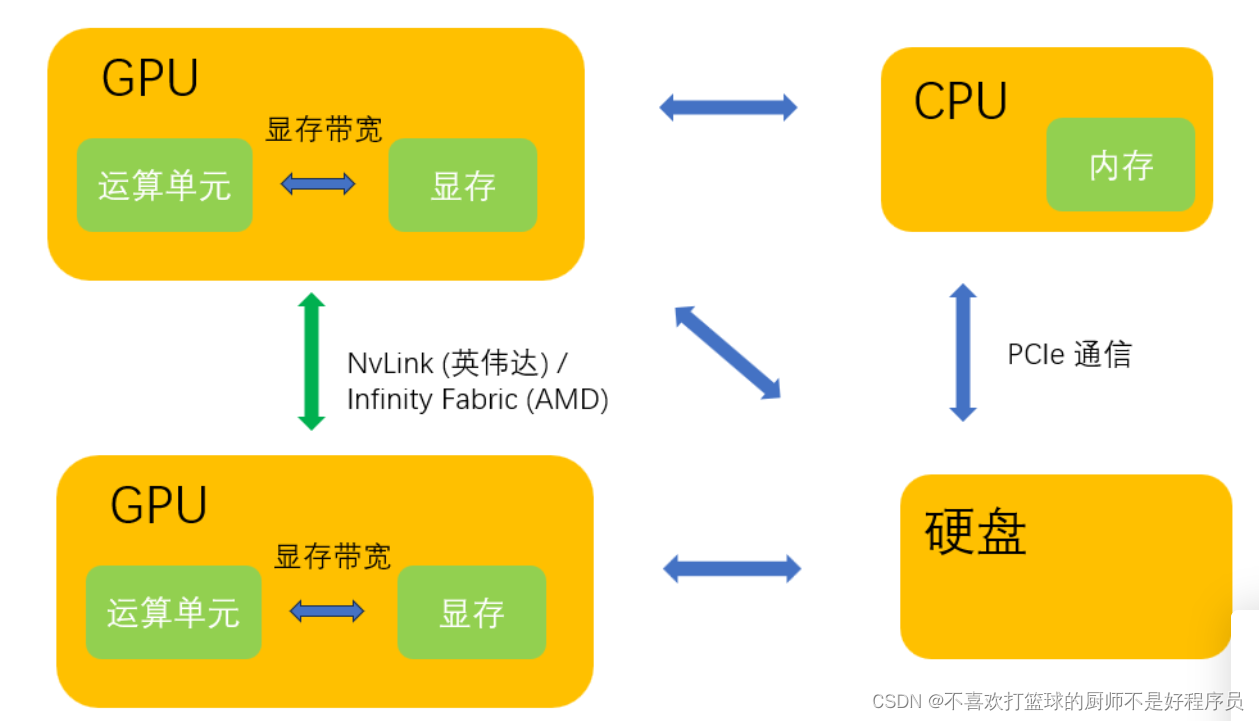
显存带宽是指显存和GPU计算单元之间的数据传输速率。
显存带宽越大,意味着数据传输越快,那么GPU整体的计算速度也会越快。所以该指标可以作为我们评估核函数运行速度的评价指标。
2. 理论显存带宽
1)计算公式
理论显存带宽由具体硬件所定义。计算公式为:
理论显存带宽 = 显存频率(Hz) * 显存位宽(bit) / 8 * 2
// 这里除以8是因为位宽的单位是bit,我们要转成 byte
// * 2 是因为 DDR(double data rate)
2)举例
以我的笔记本电脑为例:
GPU型号: NVIDIA GeForce RTX 3050 4GB Laptop GPU
显存频率:7001000 kHz
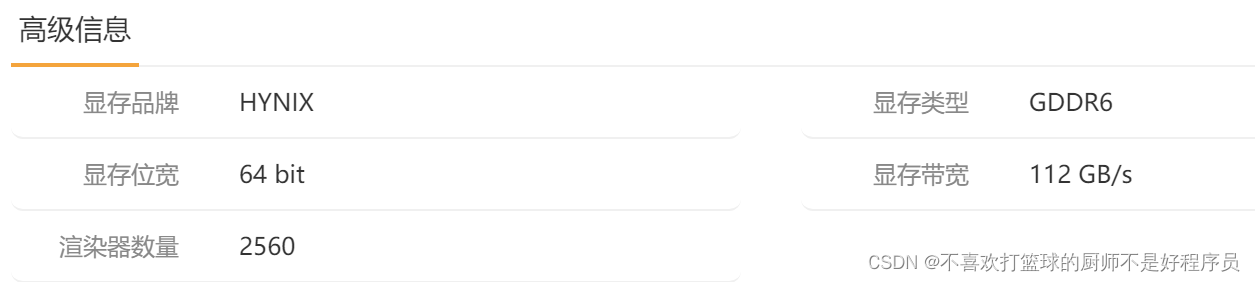
显存位宽:64 bit理论显存带宽 = (7001000 * 1000)Hz * (64 / 8)byte * 2 = 112016000000 byte/s ≈ 112 GB/s
与鲁大师的检测结果一致:
二、利用CUDA计算理论显存带宽
主要使用到了cudaGetDeviceProperties()函数。该函数用于获取GPU的相关属性信息。
具体代码如下:
#include "cuda_runtime.h"
#include "device_launch_parameters.h"void CalTheoreticalBandWidth()
{int deviceCount;cudaGetDeviceCount(&deviceCount); // 获取设备上的GPU个数for (int i = 0; i < deviceCount; ++i) {cudaDeviceProp deviceProp;cudaGetDeviceProperties(&deviceProp, i); // 获取当前GPU的相关属性std::cout << "GPU: " << i << std::endl;std::cout << "Name: " << deviceProp.name << std::endl;std::cout << "Bit width: " << deviceProp.memoryBusWidth << " bit" << std::endl;std::cout << "Memory clock rate: " << deviceProp.memoryClockRate << " kHz" << std::endl;int bw = static_cast<size_t>(deviceProp.memoryClockRate) * 1000 * deviceProp.memoryBusWidth / 8 * 2 / 1000000000;std::cout << "Theoretical band width = " << bw << " GB/s" << std::endl;}
}
运行结果:
GPU: 0
Name: NVIDIA GeForce RTX 3050 4GB Laptop GPU
Bit width: 64 bit
Memory clock rate: 7001000 kHz
Theoretical band width = 112 GB/s
相关文章:
使用CUDA计算GPU的理论显存带宽
文章目录 一、显存带宽和理论显存带宽1. 显存带宽2. 理论显存带宽1)计算公式2)举例 二、利用CUDA计算理论显存带宽 一、显存带宽和理论显存带宽 1. 显存带宽 显存带宽是指显存和GPU计算单元之间的数据传输速率。 显存带宽越大,意味着数据传…...
npm install依赖冲突解决办法
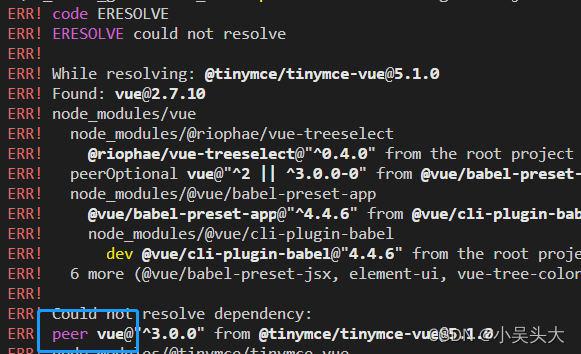
今天npm的时候发现报错,原来是依赖冲突了 npm后面加上这个指令就可以顺利的安装依赖了。问题主因就是不同开发用了不同版本node导致依赖版本不同,出现了成功冲突,这是段指令;它告诉npm忽略项目中引入的各个依赖模块之间依赖相同但…...

植物大战僵尸各种僵尸攻略
前言 此文章为“植物大战僵尸”专栏中的009刊(2023年9月第八刊),欢迎订阅。版权所有。 注意: 1.本博客适用于pvz无名版; 2.pvz指植物大战僵尸(Plants VS Zonbies); 3.本文以耗费低做标准&am…...

Scrum敏捷开发企业实战培训
课程简介 Scrum是目前运用最为广泛的敏捷开发方法,是一个轻量级的项目管理和产品研发管理框架。 这是一个两天的实训课程,面向研发管理者、项目经理、产品经理、研发团队等,旨在帮助学员全面系统地学习Scrum和敏捷开发, 帮助企业快速启动敏…...
uniapp 下拉框数据回显的问题
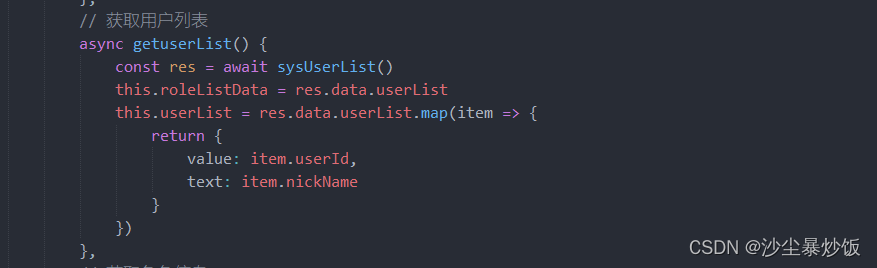
问题 : 现在是下拉框数据回显不了, 绑定的v-model 原因 : uniui 下拉框数据绑定要是 value text 这种格式的 解决办法: 将获取到的后端数据 转换为 需要的格式 ,再进行绑定 下拉框的数据 遍历...

使用php 获取时间今天、明天、昨天时间戳的详解
使用php获取时间今、明天、昨天时间戳 <?php echo "今天:".date("Y-m-d").""; echo "昨天:".date("Y-m-d",strtotime("-1 day")), ""; echo "明天:".date("Y-m-d&qu…...
IIS解析漏洞复现
文章目录 漏洞复现总结 漏洞复现 打开虚拟机,在C:\inetpub\wwwroot\8000_test目录下放一个phpinfo.php文件: 在服务器管理器中打开IIS管理器,选择处理映射程序: 点击添加模块映射: 配置映射模板,php文件…...

生活随笔-吐槽篇
前言 😘个人主页:曲终酣兴晚^R的小书屋🥱 😕作者介绍:一个莽莽撞撞的🐻 💖专栏介绍:日常生活&往事回忆 😶🌫️每日金句:被人暖一下就高热&…...
vscode debug python launch.json添加args不起作用
问题 为了带入参数调试python 程序,按照网上搜到的教程配置了lauch.json文件,文件中添加了"args": [“model” “0” “path”] {// 使用 IntelliSense 了解相关属性。 // 悬停以查看现有属性的描述。// 欲了解更多信息,请访问: h…...

信息化发展23
加密解密 1 、加密技术包括两个元素: 算法和密钥。 2 、发信者将明文数据加密成密文, 然后将密文数据送入网络传输或存入计算机文件, 而且只给合法收信者分配密钥。合法收信者接收到密文后, 实行与加密变换相逆的变换,…...

FlinkCDC 菜鸟教程-文章目录
系列文章目录 背景篇 环境篇 准备一台已经安装了 Docker 的 Linux 或者 MacOS 电脑。准备教程所需要的组件版本对应关系安装环境检查 工具篇 flinkkibana 概念篇 Docker 介 绍Docker Compose 介 绍Kibana介 绍 实践篇 演示: Mysql CDC 导入 Elasticsearch 启动服务准备…...

从零开始-与大语言模型对话学技术-gradio篇(4)
前言 本文介绍「星火杯」认知大模型场景创新赛中的落选项目- AI命理分析系统,属于个人娱乐练手。总结提炼了往期文章精华并发掘出新的知识。 包括本地部署版本和Web在线版本,两种打包方式基于 半自动化使用.bat手动打包迁移python项目 如何把 Gradio …...
OpenCV项目实战(1)— 如何去截取视频中的帧
前言:Hello大家好,我是小哥谈。针对一段视频,如何去截取视频中的帧呢?本节课就给大家介绍两种方式,一种方式是按一定间隔来截取视频帧,另一种方式是截取视频的所有帧。希望大家学习之后能够有所收获&#x…...

「程序员必须掌握的算法」动态规划「上篇」
动态规划详解 动态规划 (Dynamic Programming) 是一种算法思想,用于解决一些复杂的问题。本文将介绍动态规划的分类、概念和经典例题讲解。 动态规划的分类 动态规划可以分为以下两种类型: 0/1背包问题:该问题是动态规划的一种基本类型。…...

什么是Linux
什么是Linux? 不知道大家是什么时候开始接触Linux,我记得我是大三的时候,那时候通过国嵌、韦东山的教学视频,跟着搭bootloader,修改内核,制作根文件系统,一步步,视频真的很简单&…...
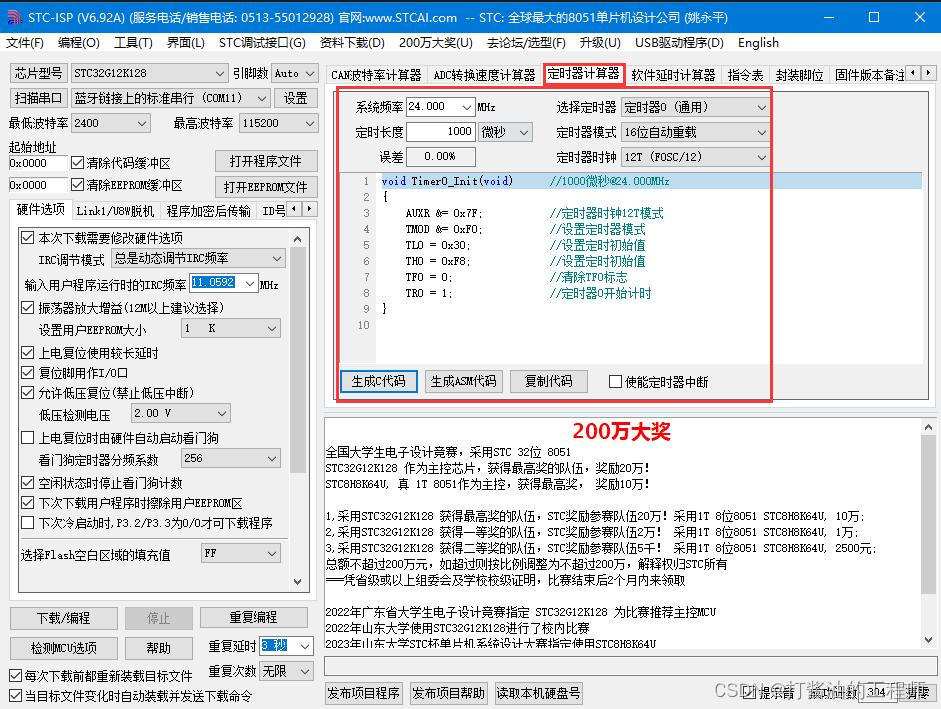
学习笔记|定时器|STC中断|定时器时间计算|STC32G单片机视频开发教程(冲哥)|第十一集:定时器的作用和意义
文章目录 1.定时器的作用和意义定时器中断定时器是定时器和计数器的统称。 2.STC32G单片机定时器使用原理2.1 先设置功能为定时器/计数器(本质都是加法计数器)2.2、在定时器模式下,设置不分频或者12分频∶Tips:选择不分频还是12分频2.3、定时器的工作模式…...

第28节-PhotoShop基础课程-图层操作
文章目录 前言1.像素图层2.删除 Delete3.合并 Ctrl E4.盖印 Ctrl Shift Alt5.图层顺序-拖动就可以6.编组-Ctrl G 管理图层-分类存放7.锁定图层-背景图层8.不透明度9.查找图层 2.智能图层1.能保持图片放大缩小(Ctrl T)的时候不丢失分辨率2.和滤镜配合使…...
)
CGAL 闵可夫斯基和(Minkowski Sums)
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 假设给定两个集合 A , B ∈ R d A,B∈R^d A,B...
Layui快速入门之第二节布局容器(固定宽度与完整宽度)
目录 一:固定宽度 二: 完整宽度 一:固定宽度 将栅格放入一个带有 class"layui-container" 的特定容器中,以便在小屏幕以上的设备中固定宽度,让列可控(两侧有留白效果) <!--固定宽度(两侧有留白效果)--&…...

异地容灾系统和数据仓库中数据同步的设计软件的功能模型
( 1)初始同步模块 该模块主要是在表进行初始同步时使用的;它能够根据实际需要生成物化视图 及其索引的创建语句,并完成表的初始同步。如果没有特别的要求,则调用普通初 始同步子模块进行目的端表的初始同步ÿ…...

详解 Deepsec:Vercel 开源 AI 代码安全防护工具的技术架构与实现原理
摘要在 AI 大模型深度融入软件开发全链路的今天,代码安全防护正面临 “复杂逻辑漏洞难发现、传统工具误报率高、源码隐私保护难” 三重核心挑战。Vercel 开源的 Deepsec 作为一款Agent 驱动的本地化 AI 安全防护工具,跳出传统 SAST(静态应用安…...

基于MCP协议实现AI助手个性化:Terminal Buddies项目实战解析
1. 项目概述:当你的终端伙伴遇见AI助手 如果你和我一样,每天有大量时间泡在终端和代码编辑器里,那么一个能带来些许乐趣和陪伴感的“数字伙伴”或许能点亮枯燥的编码时光。Terminal Buddies 正是这样一个巧妙结合了复古 ASCII 艺术、轻量级游…...
)
Midjourney油彩风格进阶必修课:用--no shadow, --iw 2.0, --style raw构建可控厚涂质感(附Gaussian噪声注入对照表)
更多请点击: https://intelliparadigm.com 第一章:Midjourney油彩风格的美学本质与技术定位 油彩风格(Oil Painting Style)在 Midjourney 中并非简单滤镜叠加,而是通过语义引导、纹理建模与隐空间解耦共同作用形成的高…...

联想刃7000k BIOS解锁终极指南:安全释放隐藏性能的3种方法
联想刃7000k BIOS解锁终极指南:安全释放隐藏性能的3种方法 【免费下载链接】Lenovo-7000k-Unlock-BIOS Lenovo联想刃7000k2021-3060版解锁BIOS隐藏选项并提升为Admin权限 项目地址: https://gitcode.com/gh_mirrors/le/Lenovo-7000k-Unlock-BIOS 对于联想刃7…...

Cadence焊盘绘制实战:从零到一构建PCB封装基石
1. 为什么焊盘设计是PCB封装的基石 刚入行硬件设计那会儿,我总以为画封装就是照着尺寸描边。直到有次量产时发现整批QFN芯片虚焊,才明白焊盘设计才是封装可靠性的命门。Cadence的分离式设计哲学——将焊盘(Padstack)与封装&#x…...

CentOS 7.9离线部署OnlyOffice踩坑全记录:从依赖包下载到SELinux配置的保姆级避坑指南
CentOS 7.9离线部署OnlyOffice全流程实战:从依赖包下载到SELinux配置的深度排错手册 在企业级生产环境中,离线部署文档协作平台往往面临比常规安装更复杂的挑战。本文将以CentOS 7.9为例,详细拆解OnlyOffice在完全离线环境下的部署全流程&…...
:比特的手术刀,镜像翻转与空间缝合)
【运算篇】算术与逻辑律令(3):比特的手术刀,镜像翻转与空间缝合
在 4-bit 的逻辑地牢里,如果说算术指令提供了“肌肉”,逻辑指令开启了“感官”,那么接下来我们要聊的,则是这台机器最细腻的形态手术。如果说 AND/OR 是在判定“存在”,那么 NOT 和移位指令(SHL/SHR&#x…...

【2024独家首发】Red Cabbage印相参数矩阵表:17组实测--no stylize值×--sref权重×色域压缩阈值,精准复现植物染料氧化还原曲线
更多请点击: https://intelliparadigm.com 第一章:Red Cabbage印相的化学机理与Midjourney参数映射原理 花青素的pH响应性与图像显影基础 红甘蓝(Red Cabbage)提取液富含花青素(anthocyanin),…...

Intel Wi-Fi 6 AX201网卡间歇性断连?华硕飞行堡垒8用户必看的节能模式与驱动管理避坑指南
Intel Wi-Fi 6 AX201网卡间歇性断连?华硕飞行堡垒8用户必看的节能模式与驱动管理避坑指南 当你的华硕飞行堡垒8笔记本突然无法连接Wi-Fi,设备管理器里Intel Wi-Fi 6 AX201网卡显示黄色感叹号并提示"代码10"错误时,这往往不是简单的…...

BFD与NQA:网络故障检测与性能分析的协同之道
1. BFD与NQA:网络运维的双子星 刚入行做网络运维那会儿,最怕半夜接到告警电话。记得有次凌晨三点,核心交换机突然丢包,传统Ping检测像老牛拉车,等定位到光纤模块故障时,业务已经中断了17分钟。直到后来用上…...